The weighted state and relative state information feedback is introduced into the existing coordination control protocol aiming to improve the robustness of fractional-order multi-agent systems against fractional-order . By applying frequency-domain method and Nyquist stability theorem, a sufficient condition is given to ensure the fractional-order coordination. It is shown that the proposed coordination control protocol can improve the robustness of fractional-order multi-agent systems against fractional-order under directed communication topology. Two numerical examples are given and the corresponding simulation results show that compared with the existed coordination control protocols, the proposed weighted state and relative state information feedback control protocol is feasible and effective for improving the robustness performance.
In the past decades, the distributed coordination control over communication networks has received a great deal attention in various research fields. This is partly due to its extensive applications, including sensor networks, biological systems, multi-vehicle systems, and synchronization of complex networks.1–13 The key characteristic of those applications is that each individual agent lacks global information of the whole multi-agent system and can only exchange information with its neighbors.
Many interesting agent-related coordination problems are under investigation, and fractional-order coordination becomes a very active research direction. Some significant works have been investigated for fractional-order coordination control (see previous studies14–30 and the references therein). The research on fractional-order coordination control problem can be traced back to Cao14 and Cao et al.,15 where the coordination problem of fractional-order systems was first proposed and investigated. They have assumed that all the agents communicate in an ideal environment. Furthermore, Shen and colleagues16,17 have considered the consensus problems of fractional-order systems in a general case. They assumed that there exist input and/or communication delay in the process of information transmission and measurement. By using frequency-domain approach, it has been proven that the consensus of the fractional-order systems can be reached with simultaneously nonuniform input and communication delays. In order to improve the robustness of fractional-order multi-agent systems against communication time delay, Liu et al.18 proposed a new consensus protocol based on the delayed-state fractional-order derivative. However, only the fractional-order case was discussed. The leader-following consensus problem of fractional-order systems with general linear models was studied by Zhu et.al.19 On the basis of the work of Zhu et al.,19 Yu et al.20 have investigated the leader-following consensus of fractional-order multi-agent systems with nonlinear dynamics. Furthermore, when the leader’s motion is independent of all the other agents, Yu et al.21 have solved this fractional-order consensus problem by introducing the adaptive pinning control approaches. As the development of distributed control methods, many advanced control methods have been assimilated into the fractional-order systems, such as adaptive control,22,23 adaptive fuzzy control,24–26 and model-learning control method.27 Moreover, by introducing some of these advanced control methods, the control performance of some complex industrial plants has been significantly improved.22–30
Recently, Cao14 and Cao et.al.15 proposed and investigated the coordination control problems of fractional-order linear systems. They have proven that the fractional-order system coordination can be achieved if the fixed interaction graph has a directed spanning tree and the fractional-order lies in , where and satisfies . Obviously, when the fractional-order is greater than , the fractional-order system cannot achieve the coordination. A problem arises: under the given communication topology, how to improve fractional-order to make fractional-order systems have a better robustness against fractional-order? Based on the above discussions, we know that it is still of considerable value to find some new approaches for designing coordination control protocol of fractional-order multi-agent networks. In this article, we aim to improve the coordination performance of the fractional-order systems over directed topologies. There are two main contributions which are worth to be emphasized:
Based on the weighted state and relative state information, a new coordination control protocol is proposed.
By properly choosing the weighted parameter , the designed control protocol can improve the fractional-order coordination performance.
The outline of this article is as follows. Section “Preliminary” introduces some preliminaries on communication topology, Caputo fractional-order derivative, the Laplace transform of fractional-order function, and formulates the problem under investigation. Convergence analysis of the coordination protocol is studied in section “Convergence analysis.” A sufficient condition is obtained for all the agents to reach agreement. In section “Improvement coordination performance over directed topology,” we investigate the effect of the introduced control protocol on the robustness against fractional-order . In section “Numerical example,” two simulated examples are provided to verify the theoretical analysis. Finally, some concluding remarks are drawn in section “Conclusion.”
Throughout this article, unless otherwise specified, the following notations are used. Given a matrix A, let and denote the ith eigenvalue and spectral radius of matrix A, respectively. means that A is a positive definite (semi-definite) matrix. and represent the real and imaginary parts of a complex number, respectively. , , and denote the conjugate, the phase, and the Euclidean norm of complex number x, respectively. [·] stands for the integer part of a real number. Let and denote the identity matrix with dimension and the n-dimension column vector with all elements equal to 1, respectively. The set of the N-dimensional column vectors is denoted by .
Preliminary
Before formulating the research problem, we will introduce some basic concepts of the communication topology, the Caputo fractional operator, and the Laplace transform, which are important in the following analysis.
Communication topology
In this subsection, we shall introduce some basic concepts of the communication topology. A directed graph will be used to model the communication relationship of the multi-agent network, where is the set of of node, node i representing the ith agent, is the set of ordered edge, and with nonnegative elements is called the weighted adjacency matrix of the digraph . An ordered pair in the directed graph represented by a directed edge means that agent i can receive information from agent j directly, but not necessarily, vice versa. Without loss of generality, we called agent j as the parent node and agent i as the children node. All the parent nodes of agent i are denoted by . An ordered sequence of edges is called a path from agent to agent . is the adjacency matrix of with nonnegative terms where is equal to 0 and is greater than 0 for any . is the Laplacian matrix of graph , which is defined as follows
If every node in a directed graph has exactly one parent node except one vertex has no parent nodes, then we called it a directed tree. A spanning tree of directed is a directed tree whose node set is and whose edge set is a subset of . For the case of undirected graph, if any two nodes of a graph has a path, then is called connected, otherwise disconnected.
Caputo fractional operator
The Riemann–Liouville and Caputo fractional derivatives are defined, respectively, as follows
and
where . Note that the initial conditions for fractional differential equations with Caputo derivative have the same form as for integer-order differential equations.31 For this reason, engineers and physicists prefer Caputo fractional derivative. Therefore, the Caputo fractional derivative is used to model the system dynamics in this article. For the sake of notational simplicity, is used to represent in the following analysis.
Laplace transform
In this part, we will introduce the Laplace transform of the Caputo fractional derivative
Problem formulation
Consider a fractional-order multi-agent system consisting of n agents and each agent’s dynamics can be described by
where is the position and is the control input of agent i, respectively. is the α-th derivative of .
A coordination algorithm is proposed in Cao et al.15 as follows
where is the (i, j)-th entry of the weighted adjacency matrix , is the parent node set of agent i, and and are constants which denote the consensus reference state of agent i and j, respectively.
In order to improve coordination performance, the following weighted control algorithm will be used for agent i
where is the weighted control parameter and satisfies
Remark 1
Note that only the relative state information is used to design the coordination control protocol (4). Compared to equation (4), the weighted state and relative state information are applied in equation (5).
Substituting the control rule (5) into dynamic system (3), the dynamic of agent i becomes
Let . By introducing notations and , we rewrite equation (6) in a compact matrix form as follows
where is the nonsymmetrical Laplacian matrix associated with .
Note that there exits an orthogonal matrix T that can translate the Laplacian matrix into the following Jordan canonical form
where are standard Jordan blocks, is an eigenvalue of Laplacian matrix . By defining a new variable , the fractional-order system (7) can be rewritten as
Therefore, system (8) can be decoupled into n one-dimensional systems and represented as the following two cases
or
Convergence analysis
The following lemmas play an important role in deriving our main results.
Lemma 1
For a fixed directed graph , the Laplacian matrix has a simple zero eigenvalue with an associated eigenvector 1, and all of the other eigenvalues have positive real parts if and only if has a directed spanning tree.32
Lemma 2
If Re , the solution of equation (9) has the following properties.
When Re and , , as , where , where .
When and
When and
When , the fractional-order system is not stable.
Proof
(Proof of Property 1) Taking the Laplace transform of system (9), it follows that
and
where represents the Laplace transform of . Note that the denominator of in equations (11) and (12) is . Next, we shall derive the conditions to ensure that all the poles of lie in the open left half plane (LHP).
Let and set , where i is the imaginary unit, we obtain
Therefore, when , all the poles of lie in the open LHP. Thus, for , , as .
(Proof of Properties 2, 3, and 4) The proofs of Properties 2, 3, and 4 follow from Podlubny31 and Gorenflo and Mainardi.33
Lemma 3
Assume that the continuous function satisfies . If Re and , where , the solution of equation (10) satisfies .
Proof
Since , we can easily get that . When , by taking the Laplace transform of equation (10), it yields that
It follows from lemma 2 that the poles of equation (10) are all in the open LHP. Since , we get . In virtue of the final value theorem, we obtain
When , by taking the Laplace transform of equation (10), it follows that
By a very similar discussion of , we have . In what follows, we will give our main results.
Theorem 1
Consider the fractional-order dynamic system (3) with control protocol (5) under a fixed directed communication topology that has a spanning tree. Then, the fractional-order dynamic system (3) asymptotically achieves the coordination control, if the fractional-order satisfies
where , is the ith eigenvalue of Laplacian matrix , and .
When , the solution of equation (7) satisfies , i.e., as . When , the solution of equation (7) satisfies and , that is, as .
Proof
Noting that the communication topology contains a spanning tree, 0 is a simple eigenvalue of and all other eigenvalues of have positive real parts according to lemma 1. To describe conveniently, let and Re .
Case 1. is a simple eigenvalue. When , it follows from properties 2 and 3 in lemma 2 that for and for .
Case 2. Re . When is a simple eigenvalue satisfying equation (13), we can easily get that follows from property 1 in lemma 2. When is a multiple eigenvalue satisfying equation (13), it follows from lemma 3 that and hold.
Based on the above arguments, it yields that for and for . In what follows, we will discuss the coordination equilibria of system (7).
When , implies , where has only one element and the other elements are equal to zero. Since T is an orthogonal matrix, the first column of matrix T can be chosen as and the first row of can be chosen as , where q satisfies . Thus, , that is, as .
When , the process of proof is similar to that of , and hence omitted. This completes the proof.
To find out the upper bound of fractional-order , we have the following algorithm.
Algorithm 1.
Input: parameters n, ,
Output:
1: Calculating eigenvalues of the matrix Laplacian ,
2: fori = 1: ndo
3: ifthen
4:
5:
6: else
7: return false
8: end if
9:
10: end for
11: return
Remark 2
When , the coordination control protocol (5) degenerates to a standard protocol which is considered in Cao et al.,15 and the result coincides with Theorem 1 in Cao et al.15 Therefore, we have extended the results obtained in Cao et al.15
Remark 3
When the reference state is not equal to zero, one can repeat a very similar argument and get the same conclusion. The proposed coordination control algorithm can be applied to intelligent transportation control to avoid traffic congestion and roadway accidents.
Specially, when the considered interaction topology is fixed and undirected, we can get the following Corollary.
Corollary 1
Consider the fractional-order dynamic system (3) with control protocol (5) under a fixed and connected undirected communication topology. Then, the fractional-order dynamic system (3) asymptotically achieves the coordination control, if the fractional-order satisfies
When , the solution of equation (7) satisfies , that is, as . When , the solution of equation (7) satisfies and , that is, as .
Proof
Since the considered communication topology is fixed, undirected, and connected, it follows that 0 is a simple eigenvalue of and all other eigenvalues of are positive real numbers. which implies that . The rest proof is similar to Theorem 1, and hence omitted.
Improvement of coordination performance over directed topology
In this part, we will investigate the effect on the robustness performance of fractional-order . The objective is to prove that , that is, . If the considered interaction graph has a spanning tree, then 0 is a simple eigenvalue of and all other eigenvalues of have positive real parts according to lemma 1. Without loss of generality, we assume that and Re . Since and , one can easily obtain that and for , which implies and . In order to compare the minimum between and , we only need to discuss the case of . Obviously, which implies . Since the arctangent function is a monotone increased function, it yields that for any .
From above discussion, we can get the following theorem.
Theorem 2
The fractional-order system (3) applying the coordination protocol (5) can tolerate bigger fractional-order than applying the control protocol (4), that is, , where is given in equation (20) and is given in Cao et al.15
Remark 4
Compared to the existing coordination control protocol (4), when the fractional-order is greater than the maximum requirement, the proposed control law (5) can achieve coordination but the control law (4) cannot. As the weighted parameter is introduced, the proposed control protocol (5) requires more computation which may affect the coordination convergence speed.
Numerical example
In order to illustrate the correctness of the above discussions, two numerical examples are presented as follows.
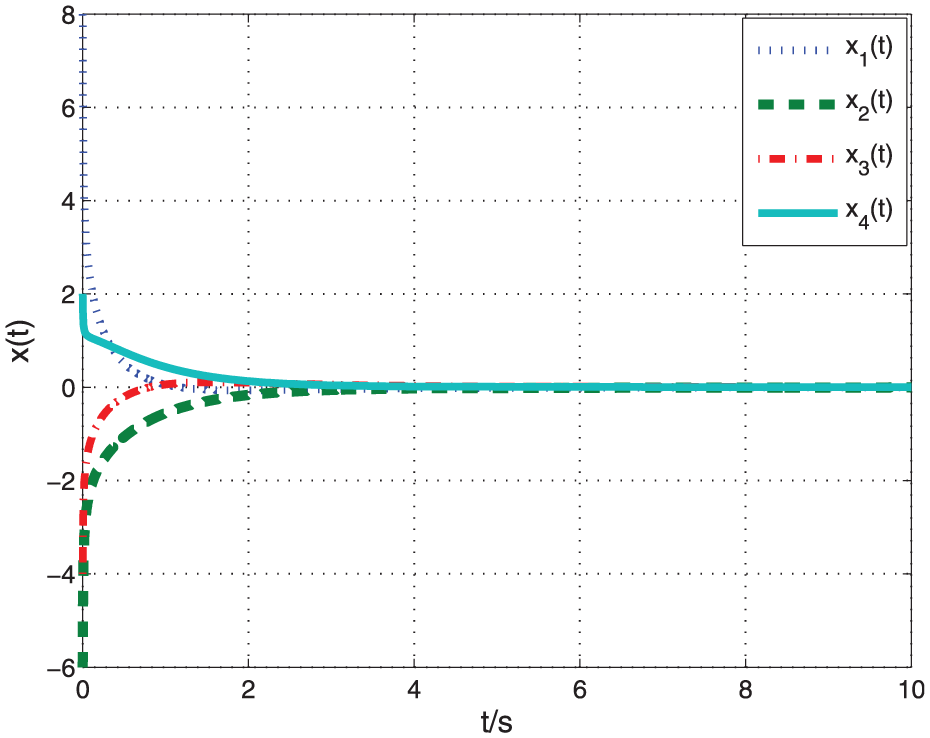
Example 1
Here, we consider a fractional-order system described in equation (3). The communication topology is given in Figure 1. For simplicity, we choose . Obviously, the directed graph has a spanning tree. The Laplacian matrix associated with graph is
and its four eigenvalues are , respectively. The initial states of agents are generated randomly. Choosing the control parameter , it follows theorem 1 that the fractional-order .
A directed graph composed of four agents.
Under the control of the protocol (5), the state trajectory of the closed loop systems (7) is shown in Figure 2. It can be seen that as time goes on, the states of the group asymptotically achieve coordination. So, this simulation is consistent with the theoretical result in section “Convergence analysis.”
Simulation result of equation (7) with fractional-order .
Example 2
Consider that a fractional-order system has 12 agents. The interaction graph is given by Figure 3 which is provided in Cao et al.15 Obviously, the interaction graph has a spanning tree. Let . The eigenvalues of corresponding nonsymmetric Laplacian matrix are and Chosen , by simple calculation, we obtain and . This result coincides with theorem 2.
A directed graph composed of 12 agents.
Choose the same initial states as given in Cao et al.15Figures 4 and 5, respectively, depict the position state trajectories with the same fractional-order by applying the different control protocols. From these simulations, we easily found that the fractional-order system (3) applying to the coordination control law (4) diverges, whereas the same system applied to the weighted state and relative state feedback control law (5) converges to the same state. Therefore, the introduced control protocol can improve the coordination performance of the fractional-order system. These simulations are consistent with the theoretical results in sections “Convergence analysis” and section “Improvement coordination performance over directed topology.”
State trajectories of the fractional-order system (3) applying the proposed protocol (5) with fractional-order .
State trajectories of the fractional-order system (3) applying the existed protocol (4) with fractional-order .
Conclusion
In this article, a new coordination protocol based on the weighted state and relative state feedback was proposed for improving coordination performance. It has been shown that for the fractional-order system with fixed and directed interaction communication graphs, the introduced control algorithm can improve the robustness performance against fractional-order . For future research, the impact of system uncertainties and external disturbance may be considered, and the intelligent control protocol applied to fractional-order system is also interesting.
Footnotes
Academic Editor: Yongping Pan
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Fund of Natural Science Foundation of Guangdong Province (nos 2014A030310418 and 2014A030313629), the Science and Technology Planning Project of Guangdong Province (nos 2014A050503068, 2015A010106018, and 2016A050502066), and the National Natural Science Foundation of China (nos 61471122, 61573153, and 61501119).
References
1.
Olfati-SaberR. Distributed Kalman filter with embedded consensus filters. In: Proceedings of the joint CDC-ECC conference, Sevilla, 12–15 December 2005, pp.8179–8184. New York: IEEE.
2.
HeYPeiHSunT.Robust tracking control of helicopters using backstepping with disturbance observers. Asian J Contr2014; 16: 1387–1402.
3.
SunTPeiHPanY. Robust adaptive neural network control for environmental boundary tracking by mobile robots. Int J Robust Nonlin2013; 23: 123–136.
4.
ReynoldsC.Flocks, herds and schools: a distributed behavior model. Comput Graphics1987; 21: 5–34.
5.
TannerHJadbabaieAPappasG.Flocking in fixed and switching networks. IEEE T Automat Contr2007; 52: 863–868.
6.
Olfati-SaberR.Flocking for multi-agent dynamic systems: algorithms and theory. IEEE T Automat Contr2006; 51: 401–420.
7.
SuHRongZChenM. Decentralized adaptive pinning control for cluster synchronization of complex dynamical networks. IEEE Trans Cybern2013; 43: 394–399.
8.
JadbabaieALinJMorseA.Coordination of groups of mobile autonomous agents using nearest neighbor rule. IEEE T Automat Contr2003; 48: 988–1001.
9.
Olfati-SaberRMurrayR.Consensus problem in networks of agents with switching topology and time-delays. IEEE T Automat Contr2004; 49: 1520–1533.
10.
FaxJMurrayR.Information flow and cooperative control of vehicle formations. IEEE T Automat Contr2004; 49: 1465–1476.
11.
HongYGaoLChangD. Lyapunov-based approach to multiagent systems with switching jointly connected interconnection. IEEE T Automat Contr2007; 52: 943–948.
12.
LiZDuanZChenG. Consensus of multiagent systems and synchronization of complex networks: a unified view point. IEEE T Circ Syst2010; 57: 213–224.
13.
LiuSXieLFrankL.Synchronization of multi-agent systems with delayed control input information from neighbors. Automatica2011; 47: 2152–2164.
14.
CaoY.Decentralized coordination of multiple autonomous vehicles. PhD dissertation, Utah State University, Logan, UT, 2010.
15.
CaoYLiYRenW. Distributed coordination of networked fractional-order systems. IEEE T Syst Man Cy B2010; 40: 362–370.
16.
ShenJCaoJLuJ.Consensus of fractional-order systems with non-uniform input and communication delays. Asian J Contr2012; 14: 1690–1697.
17.
LuJShenJCaoJ. Chapter 4. Consensus of networked multi-agent systems with delays and fractional-order dynamics. In: KocarevL (ed.) Consensus and synchronization in complex networks. Berlin, Heidelberg: Springer-Verlag, 2013, pp.69–110.
18.
LiuXXuBXieL.Distributed tracking control of second-order multi-agent systems under measurement noises. J Syst Sci Complex2014; 27: 853–865.
19.
ZhuWWangMYangC.Leader-following consensus of fractional-order multi-agent systems with general linear models. Appl Math Mech2015; 88: 1–11.
20.
YuZJiangHHuC.Leader-following consensus of fractional-order multi-agent systems under fixed topology. Neurocomputing2015; 149: 613–620.
21.
YuZJiangHHuC. Leader-following consensus of fractional-order multi-agent systems via adaptive pinning control. Int J Control2015; 88: 1–11.
22.
LiuHLiSWangH. Adaptive synchronization for a class of uncertain fractional-order neural networks. Entropy2015; 17: 7185–7200.
23.
PanYSunTYuH.Composite adaptive dynamic surface control using online recorded data. Int J Robust Nonlin2016; 26: 3921–3936.
24.
LiuHLiSCaoJ. Adaptive fuzzy prescribed performance controller design for a class of uncertain fractional-order nonlinear systems with external disturbances. Neurocomputing2017; 219: 422–430.
25.
LiuHPan LiSChenY.Adaptive fuzzy backstepping control of fractional-order nonlinear systems. IEEE T Syst Man Cy B. Epub ahead of print 4 January 2017. DOI: 10.1109/TSMC.2016.2640950.
26.
PanYErMSunT. Adaptive fuzzy PD control with stable tracking guarantee. Neurocomputing2017; 237: 71–78.
27.
PanYYuH.Biomimetic hybrid feedback feedforward neural-network learning control. IEEE T Neural Networ. Epub ahead of print 30 March 2016. DOI: 10.1109/TNNLS.2016.2527501.
28.
LiJMLiJS.Adaptive iterative learning control for coordination of second-order multi-agent systems. Int J Robust Nonlin2014; 24: 3289–3299.
29.
LiJSLiJM.Adaptive fuzzy iterative learning control with initial-state learning for coordination control of leader-following multi-agent systems. Fuzzy Set Syst2014; 248: 122–137.
30.
WangTGaoHQiuJ.A combined adaptive neural network and nonlinear model predictive control for multirate networked industrial process control. IEEE T Neural Networ2016; 27: 416–425.
31.
PodlubnyI.Fractional differential equations. San Diego, CA: Academic Press, 1999.
32.
RenW.On consensus algorithms for double-integrator dynamics. IEEE T Automat Contr2008; 53: 1503–1509.
33.
GorenfloRMainardiF.Fractional oscillations and Mittag-Leffler functions. Berlin: Springer, 1996.