
Abstract
Precise tracking performance and significant energy-saving effect are both important issues for electro-hydraulic servo system. Nevertheless, the electro-hydraulic servo system usually demonstrates inferior efficiency compared with other available actuation methods. To improve the efficiency of the electro-hydraulic servo system during the task of position tracking, a nonlinear energy-saving control strategy is proposed. The presented controller employs a variable supply pressure control to make the pump pressure adapt to the system demand and utilizes a nonlinear cascade controller for precise position tracking. Additionally, a disturbance observer is developed to compensate for the lumped uncertainties including parametric uncertainties and uncertain nonlinearities both in the design of variable supply pressure control and nonlinear cascade controller. Results indicate that the presented multi-input single-output system combined with the nonlinear energy-saving control strategy can save 45% energy in a harmonic trajectory tracking test and 68% energy in a multi-step trajectory tracking test, respectively, compared with its counterparts. Furthermore, the maximum tracking errors of both tests are 1.2 mm.
Keywords
Introduction
The electro-hydraulic servo system (EHSS) has been demonstrated to be a promising choice for diverse applications due to its high power density, ease of implementation, good dynamic performance, and durability, despite the rapid development of electric power transmission. Owing to these characteristics, the EHSS has been widely used in aircraft control, machine tools and manufacturing, excavating, and automotive industries. 1
Many papers are devoted to solving the problem of high-performance position tracking control of EHSS, and numerous successful methods for specific purposes were proposed.2–5 However, the EHSS usually has a lower energy efficiency compared with other actuation methods, which may limit its further utilization in industrial and mechanical equipments.
Therefore, certain efforts have been made in the literature to improve the overall efficiency of the EHSS. The electro-hydrostatic actuation (EHA) does not require the usage of control valve, and this method can increase the system efficiency considerably. 6 However, the overall achievable bandwidth of the closed-loop system is much lower than the valve-controlled EHSS due to the higher inertias. 7 An integrated control strategy of clamping force and energy saving using a load-sensing variable pump was proposed in Chiang et al. 8 Furthermore, the electrical adaptations of this method, electro-hydraulic load sensing (EHLS), which includes a constant displacement pump and an AC motor, was also utilized to improve the energy efficiency of the EHSS in Cho et al. 9 and Lovrec et al. 10 Nevertheless, the pressure difference across the valve, which is usually set as a constant value in these methods, is not optimized from an energy-saving perspective, 11 and the slow response also put an obstacle for its utilization. 12 As an alternative, energy regeneration is also an attractive research field for energy saving of EHSS. Specifically, in Lu et al., 13 the independent valve metering control method for a hydraulic manipulator using five cartridge valves and one accumulator was proposed. Although a significant energy-saving capability was obtained, the energy loss in the cartridge valve is still considerable.
In order to reduce the energy consumption across the valve, the variable supply pressure control (VSPC) strategy, which can control the supply pressure according to the system demand, has gained more attention in recent years. A kind of VSPC, which utilized the optimal control method, was presented to improve the energy-saving capabilities of the EHSS in Tivay et al. 14 Another VSPC, which was proposed in Baghestan et al., 15 can also achieve energy-saving effect on the EHSS. Nevertheless, the discrepancy between the real values and the nominal parameters utilized in the aforementioned studies and the uncertain nonlinearities including unmodeled dynamics and external disturbance have not been fully considered in the design of the VSPC and the tracking controller. More recently, a load prediction–based VSPC controller was developed for the energy-saving purpose of a hydraulic actuated robot. 16 But the VSPC in this study using the kinetics model to predict the external disturbance is not applicable for mobile machinery, since the external disturbances vary abruptly so that the load is difficult to predict.17,18
As reviewed above, some of the researchers mainly focused on the precise tracking performance without considering the energy efficiency of the system. Some of the researchers developed the controller with VSPC for the purpose of energy saving. Nevertheless, the energy-saving performance and the achievable position tracking performance of these systems may degrade when the system suffers from the lumped uncertainties including parametric uncertainties and uncertain nonlinearities. Both precise tracking and significant energy-saving performance are critical problems of the EHSS. Therefore, a nonlinear controller for the EHSS, which could solve the dual objective problem and take the lumped uncertainties into account explicitly, is necessary.
In this study, a solution for this multi-objective problem is proposed. To improve the system efficiency, a VSPC is developed in this study. Moreover, a nonlinear cascade control strategy is employed to achieve the task of position tracking. Unlike the existing VSPC, a disturbance observer (DOB) is presented to compensate for the lumped uncertainties both in the design of VSPC and nonlinear cascade controller. The effectiveness of the proposed controller is verified by tests.
System modeling and problem formulation
The EHSS configuration utilized in this article is presented in Figure 1. Specifically, a fixed displacement pump is used as a power unit. A proportional relief valve (PRV) is located in parallel with the pump to control the supply pressure, and a proportional directional valve (PDV) is utilized for the purpose of position tracking. The multi-objective problem can be addressed using this setup.

Schematic diagram of the proposed electro-hydraulic system.
Since the natural frequency of the servo valve used here is much higher than that of a typical EHSS, the valve dynamics is often neglected without a significant reduction in the control performance. 1 Therefore, the flow equations of the hydraulic valve can be written as
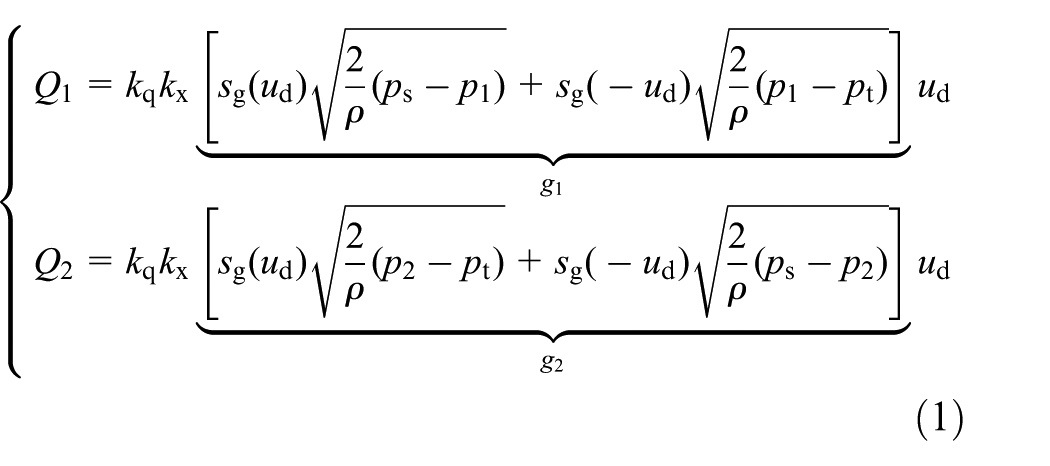

where
The pressure dynamics of the actuator can be written as

where
The force balance equation of the system is expressed as

where
Define the system state variables as equation (5)

In order to make the system fall into the strict feedback form, the state variables are reconstructed as equation (6), where

Therefore, the entire system can be expressed in a state space form as equation (7)

where
The control task is summarized as follows: given the desired motion trajectory
The whole control block diagram in this study is shown in Figure 2. The tracking performance is guaranteed by utilizing the proposed cascade tracking controller combined with DOB to synthesize a command signal
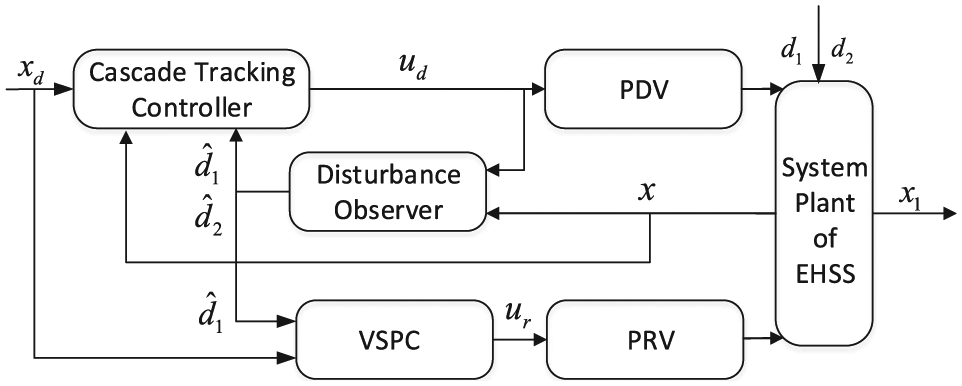
The whole control block diagram.
Controller design
DOB design
The dynamics (equation (7)) can be rewritten as

Define the estimates of the disturbances as

The dynamics of

where
Assumption
The disturbances and their derivatives are bounded such that
In fact, the disturbance is not differentiable at zero velocity since it includes the Coulomb friction. However, the actual friction has finite jumps, so that the friction model can be chosen as any differentiable function that approximates the actual discontinuous Coulomb friction. Thus, the assumption is physically reasonable. 4
In case the measurement noises are amplified by the high gains, the auxiliary state variables
Define the auxiliary state variables as

The dynamics of the auxiliary state variables are

Then,
In case


Proof
From equations (9), (10), (12), and (13), the following disturbance estimation error dynamics is obtained as

Therefore,
Remark 1
Since the projection function and adaption rate limit are added in adaptation law, two special working points should be discussed:
Assume that the
Assume that the
Nonlinear cascade tracking control
The nonlinear tracking controller is designed as a position tracking outer loop and a load pressure control inner loop. Using a recursive backstepping procedure, the controller can be expressed as follows.
Step 1. Define the tracking error as

where
The time derivative of

A virtual controller

where
Let

Define the Lyapunov function as

Combining equations (16) and (20), the time derivative of

where
Step 2. In this step, an actual control law for

The actual control

where

Define the Lyapunov function as

Combining equations (16), (22), and (25), the time derivative of

where

It can be observed that the size of the boundedness ball
VSPC
The traditional EHSS exhibits inferior efficiency due to the fact that the amount of energy produced by its power unit is constant, while the power needed in the actuator is actually variable. Therefore, in many cases of EHSS operation, a large amount of energy will be constantly consumed by the supply unit to follow a desired trajectory.
For a certain demand flow, the smallest possible pressure drop will occur if the valve is fully opened. However, in that case, the PDV cannot be adjusted in a wide range to compensate for the tracking error. Thus, in order to save energy, the input signal of the PDV should be kept at a relatively large value.
For the forward motion


Then, the valve orifice equation gives


where

By taking the pipe pressure loss into consideration, the desired pump pressure can be obtained from equations (29)–(33)

where

It can be observed that the desired pump pressure (
Since the flow rate of the pump is always higher than the flow rate required in actuator, the supply pressure always exceeds the cracking pressure (i.e. the PRV is always open). Thus, the normalized input signal of the PRV is calculated by the following simplified equation 16

where
Remark 2
A suitable initial value of
Result and discussion
In order to evaluate the performance of the proposed control algorithms, experiments were conducted on an experimental test rig which is shown in Figure 3. The position of the cylinder was measured by a displacement sensor (LS 628C). The pressures in the two cylinder chambers and supply pressure were measured by pressure sensors (HDP702). A dSpace1104 data acquisition board was used to acquire the feedback signals from sensors and generate control signals to the system. The main parameters of the system and the controller are shown in Table 1.

Experimental test rig.
Parameters of the system.

Figure 4 depicts the tracking errors of the proposed controller with three different values of


Tracking errors of harmonic tracking test using the proposed controller and PI controller.
It can be observed that the tracking errors of the proposed controller when

Tracking performance of the proposed controller for harmonic tracking test.

Normalized input signal of PDV.

Normalized input signal of PRV.
The observe results of
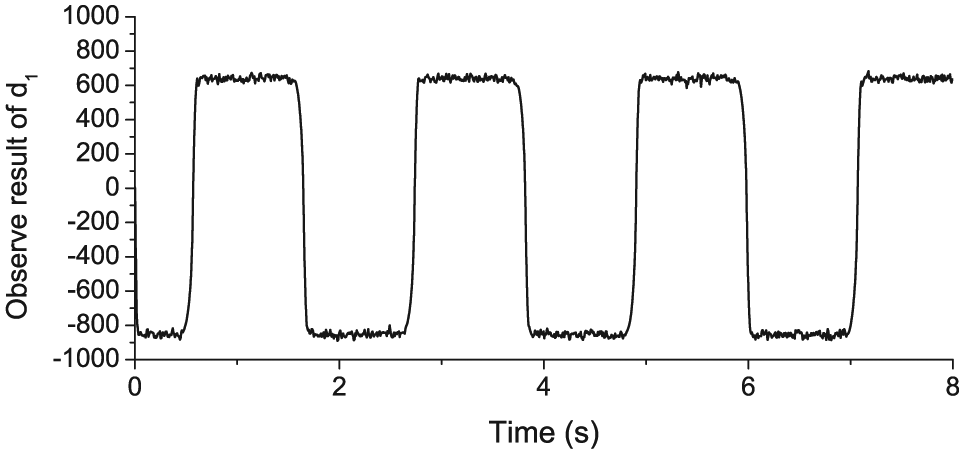
Observe result of

Observe result of

Load force estimation performance: (a) driving force, (b) estimated load force, and (c) force difference.
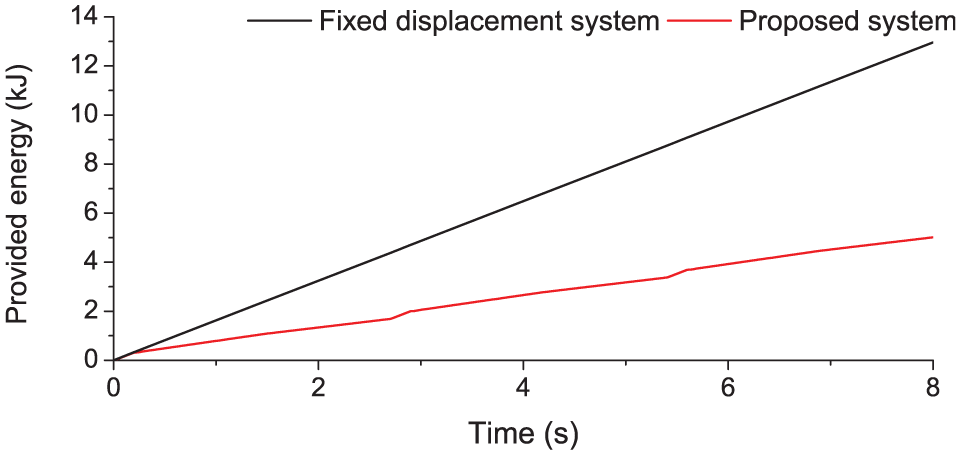
The pump pressure and chamber pressures are shown in Figure 11. It can be observed that the pressure is boosted when the demand flow is increasing and vice versa. A higher pressure margin always appears at the middle stroke of the cylinder in both forward and backward motions, which can verify the effectiveness of the energy-saving method. For the purpose of comparison, the VSPC part is omitted by setting the PRV input to a constant value. In this case, the system is similar as a fixed displacement system, in which the supply pressure is set as 42 bar. Figure 12 demonstrates the pump pressure and chamber pressures of this case. Figure 13 shows the comparison of energy supply between the fixed displacement system and the proposed system. The energy is calculated as follows

where
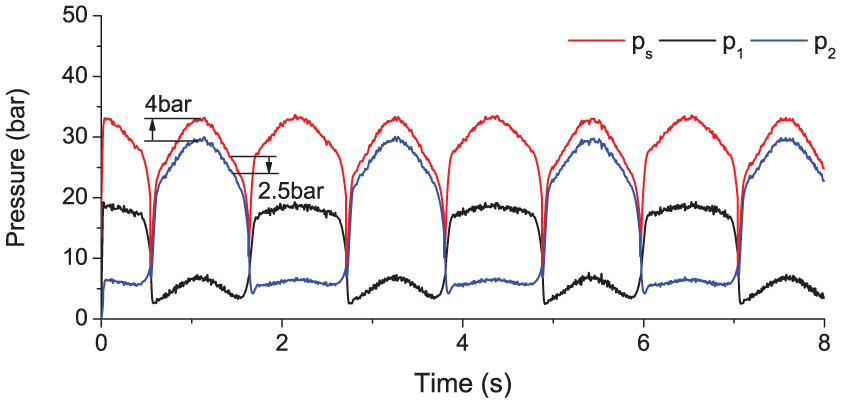
Pump pressure and cylinder chamber pressures in harmonic tracking test with VSPC.

Pump pressure and cylinder chamber pressures in harmonic tracking test without VSPC.

Energy provided by the pump with and without VSPC in harmonic tracking test.
It can be seen from Figure 13 that the energy supply of the fixed displacement system is 13.1 kJ, and the energy supply of the proposed system is 7.2 kJ. Therefore, it can be concluded from the aforementioned analysis that the proposed method is capable of saving 45% energy during a typical harmonic trajectory tracking test with the maximum tracking error of 1.2 mm.
To further verify the performance of the proposed method in position tracking and energy-saving aspects, other tests which adopt the multi-step profile as the desired trajectory are conducted by setting the value of

Tracking performance of the proposed controller for multi-step tracking test.

Tracking errors of multi-step tracking test using the proposed controller and PI controller.

Tracking performance of a fixed displacement system.

Pump pressure and cylinder chamber pressures in multi-step test with VSPC.

Pump pressure and cylinder chamber pressures in multi-step test without VSPC.
Energy provided by the pump with and without VSPC in multi-step test.
Conclusion
A DOB-based cascade controller was developed in this study for precise tracking control of EHSS. The proposed method exhibits a good tracking capacity with the maximum tracking error of 1.2 mm in two kinds of tests. Compared with Tivay et al., 14 the proposed method has a relatively small tracking error.
A DOB-based VSPC was established for energy saving. Results show that the amount of saved energy in this study is 45% in the harmonic trajectory tracking test and 68% in the multi-step trajectory tracking test compared with a fixed displacement system. Compared with Baghestan et al., 15 the proposed method has a better energy-saving performance in terms of the harmonic trajectory tracking task.
The effectiveness of the proposed nonlinear energy-saving control strategy was validated by both harmonic trajectory test and multi-step trajectory test. The results demonstrate that both precise tracking performance and significant energy-saving effect of EHSS were achieved. Moreover, this method could be combined with the independent metering to achieve even more energy in mobile machinery and other applications.
Footnotes
Acknowledgements
The authors thank Keivan Baghestan, Amirkabir University of Technology, Tehran, Iran, for his valuable suggestions.
Academic Editor: Rahmi Guclu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The project was funded, in part, by the Priority Academic Program Development of Jiangsu Higher Education Institutions (PAPD) and the 2016 Annual General University Graduate Research and Innovation Program of Jiangsu Province, China (KYLX16_0525).