
Abstract
Most fault detection methods based on the assumption of working in stationary or approximate stationary conditions are limited under varying operation conditions, for that the frequency aliasing phenomenon is inevitable in the spectrum. Therefore, in order to handle the problem of fault diagnosis under non-stationary conditions, researchers have proposed numerous methods and some achievements have been obtained. In this article, a new feature extraction method is proposed for fault diagnosis of rolling bearings under varying speed conditions. Based on the assumption that the energy will increase when balls cross over fault position, frequency values are divided by instantaneous speed and arranged in the descending order of corresponding amplitude to form a new fault feature array, that is, the ratio of frequency to instantaneous speed reconfiguration arrays. Thereafter, the Euclidean distance classifier is utilized for recognition. The efficacy of the proposed method is demonstrated by simulated and experimental data. Categorized results show that the new approach is capable of handling the bearing fault classification under varying speed conditions.
Keywords
Introduction
Rolling bearings are widely used in rotating machines, and bearing failure is one of the most common causes of machine breakdown and accidents. 1 Thus, it is important to study the defect diagnosis technology of rolling bearings. Vibration signals usually carry rich information about mechanical conditions and are often used to diagnose the faults of bearing’s localized defects.2–4
During the past decades, many intelligent fault diagnosis approaches have been proposed to analyze vibration signals. Fast Fourier transform is the most common method proposed in Corinthios. 5 Theoretically, periodic impulses will be generated when the rolling elements pass over the defect in time domain and a distinct profile emerges on the frequency spectrum. However, in practice, it is much more complex, almost no machine can work under stationary condition.4,6 Under varying operation conditions, the vibration signals collected from rolling bearing systems usually carry heavy background noise and the fault characteristic frequency is not only modulated as a series of harmonics but also is smeared on the frequency spectrum.7,8 Therefore, existing techniques based on the assumption of working in stationary or approximate stationary condition such as FFT cannot work well in extracting the overwhelmed remarkable information for fault diagnosis. In order to solve this problem, researchers have proposed numerous methods based on time-frequency analysis (TFAs) and have made some achievements. However, each of these methods has its own limitation.
Short-time Fourier transform (STFT) was presented in 1947, 9 with a fixed length window function sliding along the time axis to intercept the signal into several segments. Corresponding frequency and amplitude variation along with time are obtained, but for the restriction of Heisenberg uncertainty principle,10–12 the frequency and time resolutions may not be ideal at the same time. Wavelet transform (WT) was proposed in 1984 by Grossmann and Morlet, 13 which probably posed a considerable ideal resolution, for that the basic wavelet function can be modified according to the specific needs of specific applications. 10 According to different types of data analyzed, WT is divided into two classes, that is, continuous wavelet transform (CWT) and discrete wavelet transform (DWT), both of which have been developed successfully in the fault diagnosis field.14–17 Whereas, selecting a suitable wavelet basis, which is the key to the successful application of this method, remains an open issue. 18 Empirical mode decomposition (EMD) was developed by Huang et al. 19 in 1998, decomposed a complicated signal into a few intrinsic mode functions (IMFs). And with higher time-frequency resolution, it has been widely used in mechanical fault diagnosis.20–23 However, mode mixing as a major drawback may occur in EMD. Wigner Ville distribution (WVD) was proposed in 1948, 24 though restricted by Heisenberg uncertainty principle, the time-frequency resolution has been greatly improved, the cross term is unavoidable in those techniques.25–26
In view of the drawbacks existed in these methods, lots of improved methods had been presented. Although the shortage of these methods can be improved to some extent, they cannot be removed exactly. Considering these problems, this article presents a new fault feature extraction method based on the assumption that vibration produced by impacts has higher energy. First, the vibration signals collected from rotating machinery are intercepted with equal length randomly and processed by discrete-time Fourier transform (DTFT); second, the mean amplitude of each corresponding frequency values (AFS) of all arrays of frequency spectrums (MAFS) are calculated; repeat above steps to obtain multi-group MAFSs, and combine these results into a matrix in rows, then calculate the column mean of this matrix and get a row vector, which is called MMAFS; after that, MMAFS is sorted in descending order, and corresponding frequency values are ranked in the same sequence, these frequency arrays divided by instantaneous speed are the new fault features, named after the ratio of frequency to instantaneous speed reconfiguration arrays (RFISRA). In order to classify the faults of rolling bearings, RFISRA is calculated under different working conditions, respectively. Finally, the Euclidean distance classifier is utilized for recognition. The efficacy of the proposed method is demonstrated by simulated data and experiment signals. Categorized results show that the new approach is capable of handling rolling bearings fault classification.
The rest of this article is organized as follows: section “Feature extraction” details the process of feature extraction method proposed in this contest. In section “Simulation analysis,” a noisy fault simulated signal is formulated to validate the effectiveness of the proposed method. Section “Application to experimental signals” addresses the applications of the proposed method with the vibration signals from field tests. Finally, conclusions are drawn in section “Conclusion.”
Feature extraction
In spectrum analysis, when the spectrum amplitude of the target signal frequency is the maximum in spectrogram of the original signal, the identification effect of target signal is the best. 27 Therefore, extracting appropriate impulse components as features is crucially important for fault diagnosis.
Thus, a new fault feature of the vibration signals called RFISRA is extracted and the construction process is shown in Figure 1. In this section, we will introduce the main steps of this construction process.

Construction process of the RFISRA matrix.
Calculate the MAFS
Theoretically, the frequency components corresponding to the highest spectrum peak in the signal usually contains lots of useful information which can be assumed as the feature of the target signal. 28 However, due to the disturbance of noise and interferences with higher energy, the assumption mentioned above may not be always correct.
In order to reduce the influence of noise and other interferences, the collected vibration signal

Based on the above content, repeatedly intercept the signal for
Noise and other interferences are reduced by calculating the mean of amplitude spectrum to some extent.
Construct the
MMAFS
matrix and extract fault feature
Assume that the faults of

And a vector with the dimension of

Furthermore, the above steps are repeated for

After that we sort the first half of these row vectors of this matrix in descending order, the corresponding frequency (single-side amplitude spectrum is considered here) is divided by instantaneous rotating frequency
In this section, the process of constructing a new fault feature is introduced to reduce the influence of noise and other interferences, and the length of signal segments
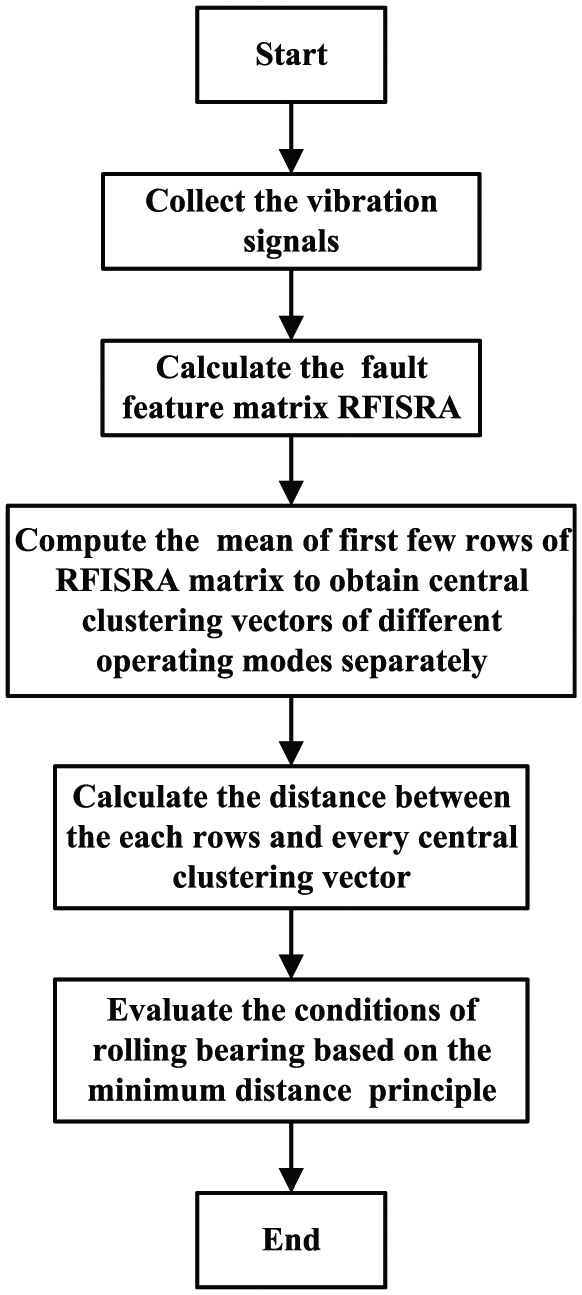
The complete process of the new method.
In order to verify the validity of the method, a simulated signal and experimental data are applied in sections “Simulation analysis” and “Application to experimental signals,” respectively.
Simulation analysis
In this section, a simulation study is conducted on a non-stationary signal which consists of both the Amplitude & Frequency modulated signal and the white Gaussian noise to verify the proposed method.
Simulation study
Considering the characteristics of the rolling bearing signals under varying speed, a synthetic signal

In these simulations,


where the structural damping ratio

And the sampling rate is
In order to consider different working conditions, these coefficient values are presented in Table 1.
Coefficient values of simulated signals.

Simulated signals are displayed in Figure 3.

Simulated signals: (a) the waveform in time domain and (b) the DTFT of simulated signals.
Application of the method on simulated signal
After simulated signals being constructed, the new fault feature matrix with the method produced in section “Feature extraction” is extracted.
For the purpose of obtaining more accurate spectrum amplitude distribution, we set a fixed length of signal segment
After calculating the fault feature matrices of different situations separately, classification would be made grounded on the Euclidean minimum distance. In order to realize recognition, the central clustering vector of each condition is obtained through computing the column mean of the first 50 rows of each matrix. The central clustering vectors of different simulated signals are shown in Figure 4.

The central clustering vector of different simulated signals.
It can be found that the tendency of each end of these arrays has larger difference; therefore, the Euclidean distances of the rest vectors of these matrices to each central clustering vector of different situations are calculated, respectively. The identification results are classified according to the theory of minimum distance criterion. Here, the target output is defined as
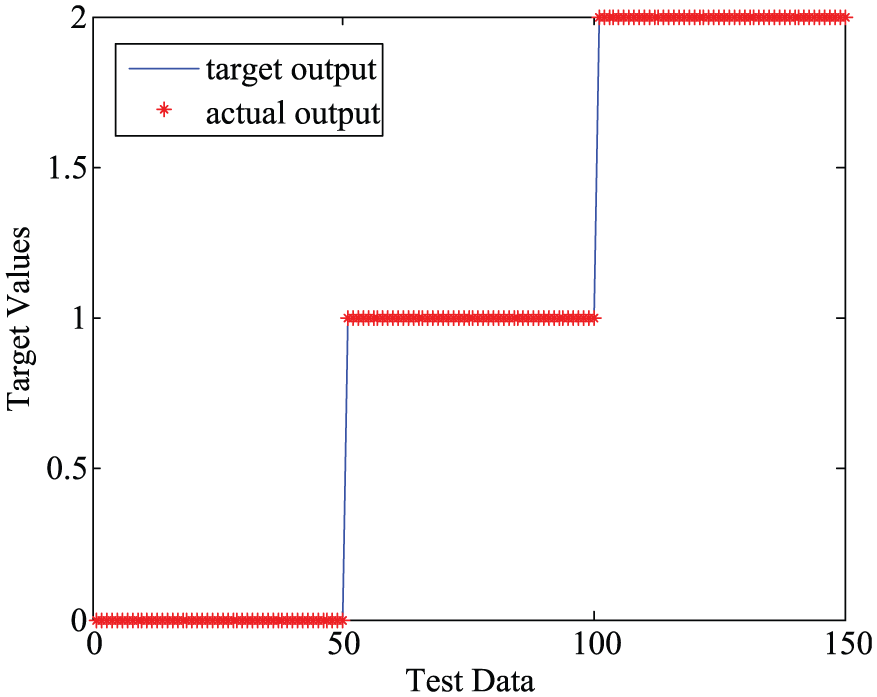
The result of simulated signal classification.
As can be seen in the picture, the classification accuracy of simulated signals reaches 100%.
To further investigate the effectiveness of the proposed detection method, the data provided from the Bearing Data Center of the Case Western Reserve University are explored. The test bunch is illustrated in Figure 6, the main components of the test stand include a 2 hp motor, a torque transducer (middle), a dynamometer (right), and a load motor connected by a self-aligning coupling. Single point faults were introduced to the test bearings with sizes of 7, 14, and 21 mils. Vibration data are collected with an accelerometer mounted on the motor housing at the drive end of the motor and the sampling frequency of each channel is 12 kHz.
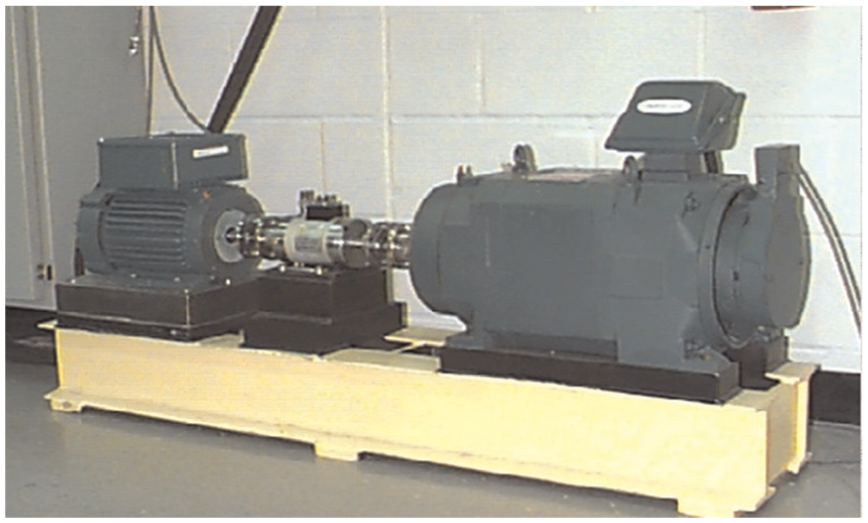
The test stand.
Application to experimental signals
In this article, the main focus are the faults of rolling bearings under varying speed conditions, so detailed descriptions of the analyzed dataset are provided in Table 2.
The details of different parameters.

IR: inner raceway; OR: outer raceway; RE: rolling elements.
First, we choose the data with the fault diameter of 7 mils, including inner raceway (IR), outer raceway (OR), and the rolling elements (RE), respectively. Each condition has the sample length of 20,000. Vibration signals are collected by an accelerometer with the sampling frequency of 12 kHz. In this article, faults are divided based on the minimum distance criterion, and the target outputs of classification is
The

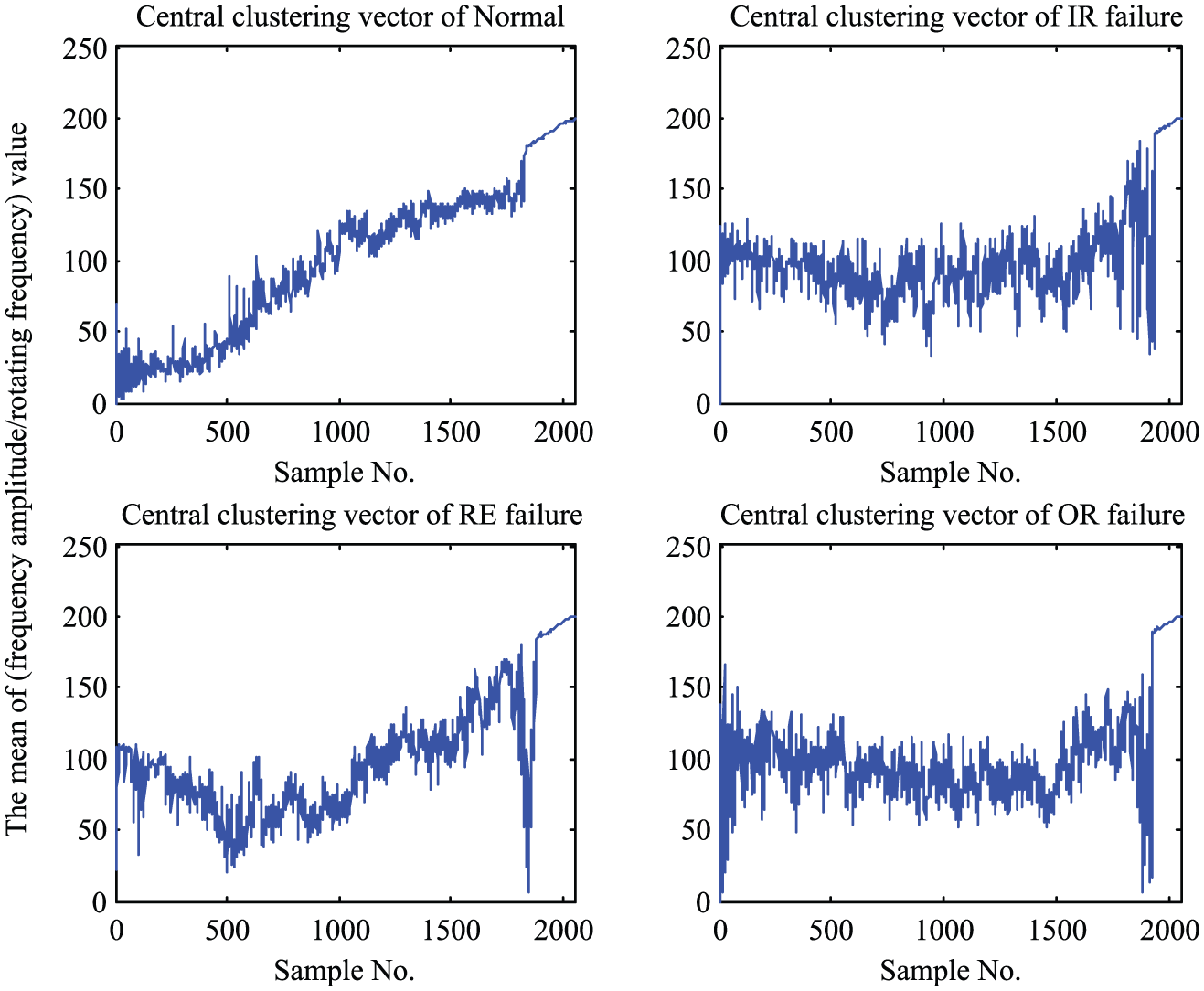
The central clustering vector of different experiment signals under the fault size of 7 mils.
As we can see, the central clustering vector of bearing operated under no fault maintains a sustained upward trend. However, when faults happen, the tendency appears to slip first and then rise up. The reason for such phenomena is that when faults happen under the condition with reduced noise and other interferences disturbance, in other words, the faults frequencies are the dominant components, with corresponding spectrum amplitudes increasing, the frequency is then sorted in the descending order of spectrum amplitudes, which causes the central clustering vectors slipping first and then rising up. Different faults have different frequency components, so corresponding central clustering vectors have special shapes as shown in Figure 7.
For the purpose of verifying the effectiveness of the method proposed in this contest under varying speed conditions, characteristic matrices of different forms in 1772, 1750, and 1730 r/min are calculated separately in the same way mentioned above, under the condition of bearing fault size being7 mils. Then, 12 matrices would be got and then they are combined with the last 50 rows of the

Classification result under the fault size of 7 mils.
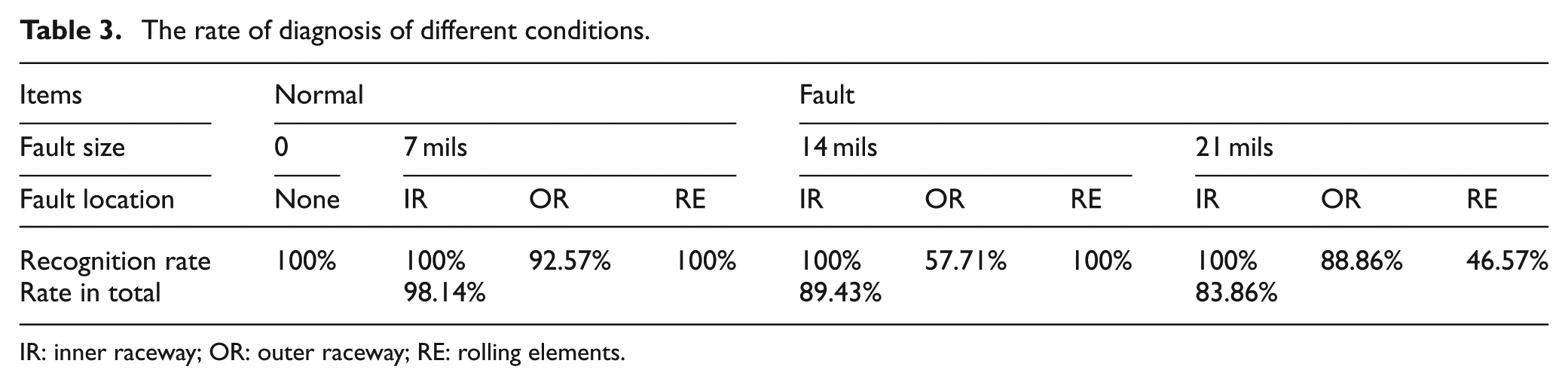
In the picture, it could be told that under the fault diameter of 7 mils, the fault recognition rate is 1374/1400, about 98.14% of the total. In detail, when the bearing is working under normal conditions, the rate is 100%, the same with the condition of ball fault and outer fault. But, under the condition of bearing with inner fault, 26 arrays are mis-recognized and the rate is 92.57%.
Under the fault diameter of 14 mils, the fault recognition rate is 1252/1400, about 89.43%. Different from the situation of 7 mils, the working conditions of normal, inner fault, and ball fault have 100% diagnosis accuracy. However, the diagnosis rate of bearing with outer fault is only 57.71%, that is, 202/350. The central clustering vector and classification result are shown in Figures 9 and 10, respectively.
The central clustering vector of different experiment signals under the fault size of 14 mils.

Classification result under the fault size of 14 mils.
As can be seen from Figures 11 and 12, under the fault diameter of 21 mils, the fault recognition rate is 1174/1400, about 83.86% of the total. Different from other cases, when the bearing approaches to failure, there are only two conditions namely normal and inner fault, the diagnosis rate keeps at 100%, the rate of outer fault is 311/350, about 88.86%, which is a little lower. But for the situation of ball fault, the rate is only 163/350, 46.57%, the method become invalid under this failure form.

The central clustering vector of different experiment signals under the fault size of 21 mils.

Classification result under the fault size of 21 mils.
As indicated above, we can come to the conclusion that the method proposed here have a good performance in dealing with the rolling bearing fault diagnosis under varying rotation speed. The rate of diagnosis of different conditions is shown in Table 3.
The rate of diagnosis of different conditions.
IR: inner raceway; OR: outer raceway; RE: rolling elements.
To illustrate the potential of the method proposed, Table 4 compares bearing fault type classification in this article with a few related studies using the same data.
Comparison with other methods under the fault diameter of 7 mils.
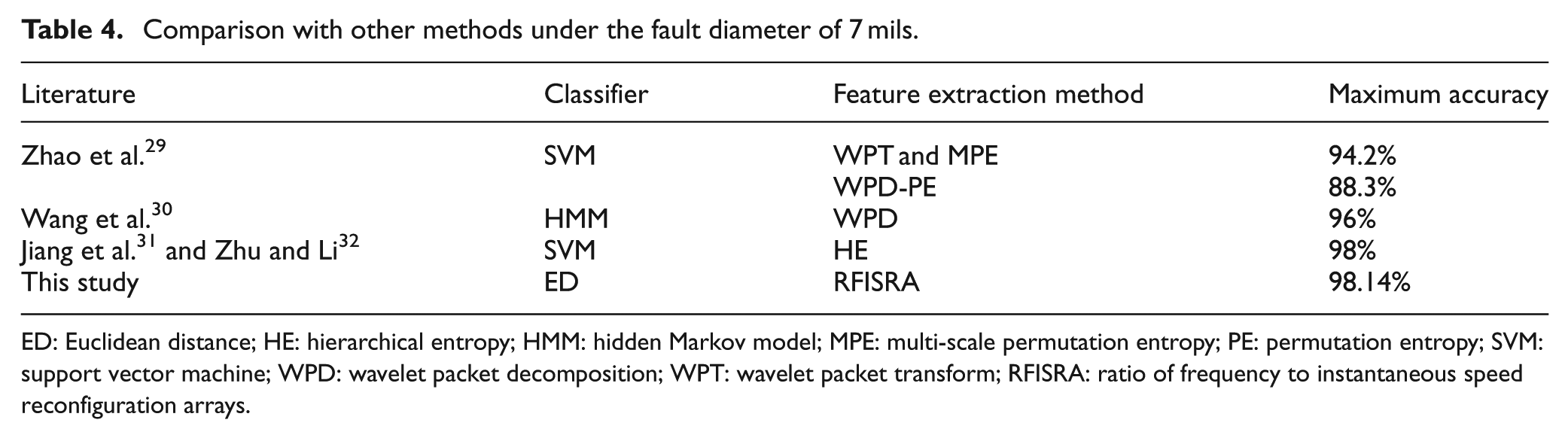
ED: Euclidean distance; HE: hierarchical entropy; HMM: hidden Markov model; MPE: multi-scale permutation entropy; PE: permutation entropy; SVM: support vector machine; WPD: wavelet packet decomposition; WPT: wavelet packet transform; RFISRA: ratio of frequency to instantaneous speed reconfiguration arrays.
Conclusion
In this context, a new fault feature of the rolling bearing vibration signals called
The new fault feature
The multiple stochastic averaging is used to reduce the influence of noise and other interferences, and ensure accurate extraction of fault features under strong noisy environment.
Simulated and experimental signals demonstrate that the proposed method can avoid the difficulty of analyzing the frequency components, which is called frequency aliasing caused by speed variation. Compared with other methods, the proposed method presents a definite advantage.
We also notice that the results of classification reduce to some extent with the increase of fault size, such as 14 mils of “OR” and 21 mils of “RE.” In order to show that this phenomenon is not accidental, we use the method proposed in this article to identify different fault levels under the same speed condition, and classification results are shown in Figure 13.

Classification result under different speeds.
We calculate the center vectors with the data collected under the fault diameter of 7 mils at different speeds, respectively. The data collected under the fault diameter of 14 and 21 mils are used as test data. The results show that the proposed method is effective in the inner fault identification, but failed in the outer fault and ball fault classification. It may be caused by the fact that the fault component will be blurred in noise more seriously with the fault degree increasing. Therefore, how to eliminate the interference and increase the intensity of useful signal on the basis of the proposed method should be further considered in future work.
Footnotes
Appendix 1
Academic Editor: Dong Wang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (51475455), Natural Science Foundation of Jiangsu (BK20141127), the Fundamental Research Funds for the Central Universities (2014Y05), and the Project Funded by the Priority Academic Program Development of Jiangsu Higher Education Institutions (PAPD).