
Abstract
The in-plane dynamic crushing behavior and energy absorption capacity of self-similar hierarchical honeycombs under different impact velocities are numerically studied using ANSYS/LS-DYNA. First, the hierarchical honeycomb models with uniform cell-wall thickness are constructed by replacing every three-edge structure nodes of a regular honeycomb with smaller self-similar hexagons of the same orientation. The respective influences of hierarchical parameters, bulk materials, and impact velocities on the macro-/micro-deformation behaviors, the dynamic strength, and the specific absorbed energy of hierarchical honeycombs are explored in detail. The results show that the crushing strengths and energy-absorbing capacities of honeycombs significantly improve when adding the hierarchy into conventional cellular structures. The variation of hierarchical parameter changes the local dynamic evolution of stress waves, which further results in different macro-/micro-deformation properties. Through the proper choice of hierarchical parameters and bulk materials, the optimal crushing strength and the maximum absorbing energy could be obtained.
Keywords
Introduction
As one kind of lightweight structures with outstanding energy absorption performance, honeycombs are widely used as advanced structural components in a variety of industries including aerospace, automotive, biomedical engineering and military affairs due to their good-density specific elastic and energy-absorbing properties.1,2 Honeycombs play a key role in the development of advanced multifunctional materials, which can be obtained by combining classical cellular solids with more sophisticated concepts like hierarchical structures. It is obvious that adding hierarchy into a range of honeycomb structures can lead to superior mechanical properties.3–8 However, research results show that the macro-mechanical performances of these structures are not just relation to the bulk material itself, but also determined by hierarchical sub-structures and cross-sectional dimensions.6–15 Especially in the dynamic crushing, lightweight cellular structures will show unique deformation behaviors, better specific elastic and outstanding specific energy absorption capacities.1,2,15–17 So the clarification of the relations between the structural hierarchy and the material dynamic behavior is also an important task in the energy absorption design of cellular materials.
In fact, as an important two-dimensional (2D) cellular solid, honeycombs with regular hexagonal cells have been widely used into all kinds of energy absorbed protective equipments.1,2 Much theoretical, numerical, and experimental work has been carried out on honeycombs under static loading and dynamic crushing.1,2,18–26 For example, Gibson and Ashby 1 systematically set out the fundamental underpinnings of the mechanical behavior of honeycombs and derived the expressions for elastic modulus and several other physical properties of these structures based on the discrete cell models. Ruan et al. 18 numerically investigated the influences of cell-wall thicknesses and impact velocities on the deformation modes and plateau stresses. After that, Hu and colleagues,19,20 Zhang and colleagues,21,22 and Qiu et al. 23 discussed the crushing deformation modes and dynamic strengths of honeycombs by changing the cell micro-structures. Moreover, Zhang et al. 24 also analyzed the effects of density gradient on the in-plane crushing behaviors of honeycombs. Considering the dynamic strength enhancement phenomena of cellular solids, Xu et al.25,26 studied the out-of-plane dynamic crushing of honeycombs caused by the entrapped air. Lots of researches have shown that the dynamic crushing strengths and energy absorption of cellular solids are generally governed by the bending deformation of cell walls and strongly depend upon the bulk material behavior and cell micro-structure parameters.15–24 It is obvious that some basic rules about the material micro-structure and macro-dynamic performance of thin-walled structures have been obtained. However, it should be noted that the plastic collapse is the main failure mechanism for these bending-dominated structures.18–24 Under uniform transverse loading, the maximum stress is located at the corners of three cell walls (i.e. the honeycomb vertexes), where the plastic hinge takes place. Furthermore, another disadvantage is that these structures have much lower in-plane stiffness, which hinders the multifunctional engineering applications severely. In order to increase in-plane stiffness and minimize macro-/micro-deformation properties of honeycomb structures, one common way is to introduce the concept of a hierarchy, whose key role playing on the stiffness, strength, and toughness of the natural and bio-inspired materials has received considerable attention.3,4 This means that moving material from the middle part of each cell wall closer to the vertexes or replacing the corners with other structures can potentially increase the transverse stiffness and strength.10–13 Based on this idea, the in-plane compressive properties of hierarchical honeycombs had been investigated.5–14 However, only the static loading is referred to previous studies.5–14,27–29 The researches about the dynamic analysis of hierarchical structures are just carried out. 30 Different from the static or quasi-static loading, the dynamic responses of hierarchical honeycombs are governed by the complex localized phenomena and the high-frequency components. The abundant dynamical evolution characteristic in honeycombs caused by the structural hierarchy and impacting velocities should be further clarified.
In this article, by repeatedly replacing the vertexes of an original honeycomb with similar but smaller hexagons of the same orientation, one kind of self-similar hierarchical honeycomb (SHH) is proposed. It is followed by the discussions on the effects of hierarchical parameters, bulk materials and impact velocities on the deformation modes, the crushing strength, the dynamic shock enhancement, and specific absorbed energy (SAE) of hierarchical honeycombs, with the aim to establish the intrinsic relation between the macro-dynamic responses and the structural hierarchy.
Methodology
Geometrical models
Hierarchical structure is an efficient way to enhance the energy absorption capability of lightweight structures.
30
In order to minimize the in-plane macro-/micro-deformation and improve the dynamic load-bearing capacities of the structures without compromising the elastic properties of bending-dominated honeycombs, one kind of SHH is developed by replacing every three-edge vertexes of regularly hexagonal honeycombs with a new hexagon that is smaller in size. SHHs can exhibit significant strength and stiffness to weight improvements over comparable non-hierarchical honeycomb structures.7,8 These hierarchical honeycombs will be used in the engineering fields of astronautics and aerospace, especially in the satellite structures with enhanced load-bearing and energy absorption capacities under various loading conditions. Figure 1 illustrates the evolved process of a self-similar hierarchical cell from an original one as the hierarchy is increased. For each level of hierarchy, two hierarchical indexes (namely, γi and ηi) are used to define the substitution geometry. The length ratio (γ) is defined as the introduced hexagonal cell-wall length (li) to the original hexagon length (l0). The thickness ratio (ηi) is the ratio of the smaller hexagonal cell-wall thickness (ti) to the edge thickness (t0) of the remaining parts of the original hexagon. For example, for the first-order hierarchy (as shown in Figure 1),

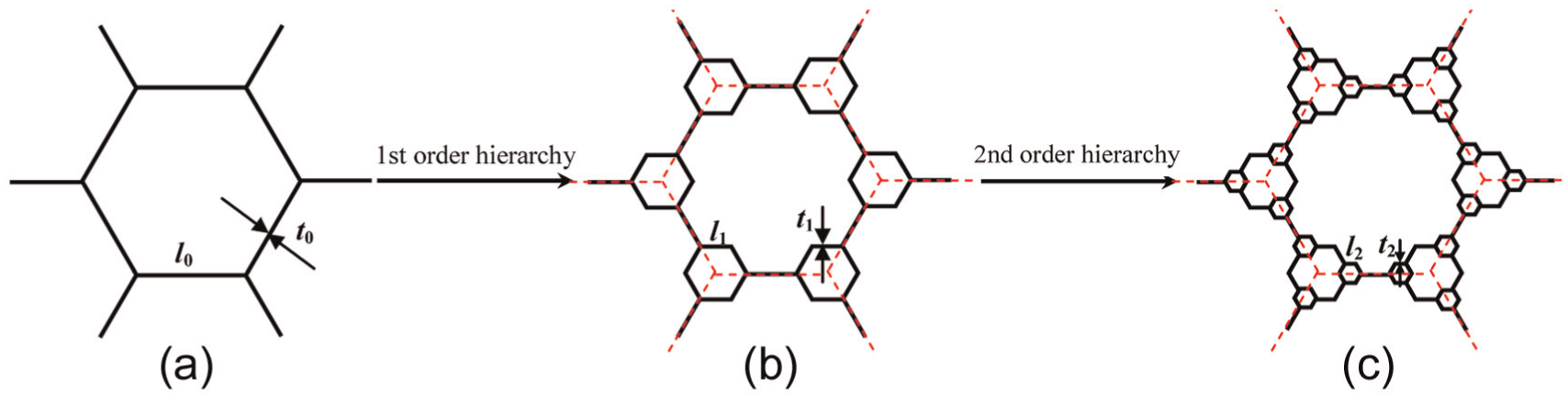
Unit cell of an evolved hierarchical honeycomb: (a) the original cell, (b) the first order, and (c) the second order.
The relative density is an important index in describing the mechanical properties of cellular solids. 1 For the SHHs, the relative density (or area fraction) can be calculated as 8

where

For the second-order SHHs, the relative density can be written as

Finite element simulations
Lots of researches have shown that the in-plane properties (e.g. stiffness, strength, and energy absorption) of cellular solids are far inferior to their out-of-plane properties.1,2,18–24 So the dynamic crushing and energy absorption capacities of hierarchical honeycombs under in-plane impact loadings are studied. Figure 2 shows the diagrammatic sketch of the calculating model for SHHs. The explicit dynamic finite element analysis (DFEA) is conducted to simulate the dynamic crushing behaviors and energy absorption capacities of SHHs using ANSYS/LS-DYNA. The length of the specimen is L1 and the width L2, and filled by honeycomb cells with different hierarchical sub-structures Figure 3 and 4. In the filling, the original hexagon length is kept constant with l0 = 10 mm. Similar to the previous simulations,18–24,31 the model is clamped by a fixed rigid plate at the stationary end (the distal end) and impacted by moving a rigid plate axially with a constant velocity from the impacting end (the proximal end). The mass of the impact rigid plate is much larger than that of the specimen so that the variation of the impact velocity for the striking plate is insignificant during the crushing. In order to study the effect of the loading rate, the impacting velocity v is varied from 1 to 200 m/s during the crushing.

Diagrammatic sketch of the calculating model for SHHs.

SHH filling models with the first-order hierarchy: (a) γ1 = 0, (b) γ1 = 0.1, (c) γ1 = 0.2, (d) γ1 = 0.3, (e) γ1 = 0.4, and (f) γ1 = 0.5.

SHH filling models with the second-order hierarchy for γ1 = 0.3: (a) γ2 = 0, (b) γ2 = 0.1, (c) γ2 = 0.125, and (d) γ2 = 0.15.
In the simulations, the rigid material is defined for the rigid plates and the kinematic hardening model (material type 3) is used for bulk material of hierarchical honeycombs in FEA. The detail parameters of the material are listed in Table 1. The bulk material is Aluminum (Al) and treated as rate independent, which is the same as those used by Ruan et al., 18 Liu and Zhang, 21 and Qiu et al. 23 Previous studies have shown that this bulk material can accurately predict the dynamic crushing properties of honeycombs.18–24 The failure mode of the material is set to the equivalent stress failure during the crushing. Each edge of the cell in finite element (FE) models (the original cell) is modeled with Shell163 and meshed into 10 shell elements. Every element has a set of elemental properties which include the element length and the thickness. For simplicity, only one element is employed in the out-of-plane (i.e. z-axis) direction. Lots of researches have shown that the shell element could ensure reliable results.18–24 Five integration points along the shell thickness direction to keep convergence, as well as the full integrated element formulation, are adopted with the aim to provide sufficiently accuracy and avoid the buckling of the shell. Each surface of the cell is defined as a single self-contact surface. Self-contact is also defined between the outside faces of a cell that might contact with other cells during the crushing. Besides, a surface-to-surface contact is applied between the specimen and two rigid plates. Some tentative simulations had shown that a friction coefficient of 0.02 between the specimen and the plates was enough, and that the effect of the friction on the simulation results could be negligible.22,32 So the friction coefficient is also assumed to be 0.02 in this work. All of the nodes used in each FE model are constrained from displacement in z-axis direction to prevent the specimen from out-of-plane bulking. The left and right edges of the specimens are free.18–24 The end offsets are controlled by terminal time in LS-DYNA code during the simulation.
Bulk material parameters of SHHs.

Crushing strength and densification strain
The nominal stress (σ) is defined as the ratio of the normal reaction force on the striking plate to the initial cross-sectional area of the specimen. And the nominal strain (ε) is defined as the ratio of the overall compression length of the specimen to its original length along y-direction. So a dynamic nominal stress–strain curve of SHHs (the black line in Figure 5) could be obtained after conversion. It is seen that the specimen will exhibit three distinct dynamic response regimes (a linear elastic stage, plateau stage, and the densification stage). It is the plateau stress (σp) in the second stage that is important in characterizing the dynamic crushing performances of cellular solids, which has been widely used in energy-absorbing design of lightweight structures.18–26 It is defined as the average stress between the first stress peak and the compressive stress corresponding to the densification strain,24,32 which can be expressed as

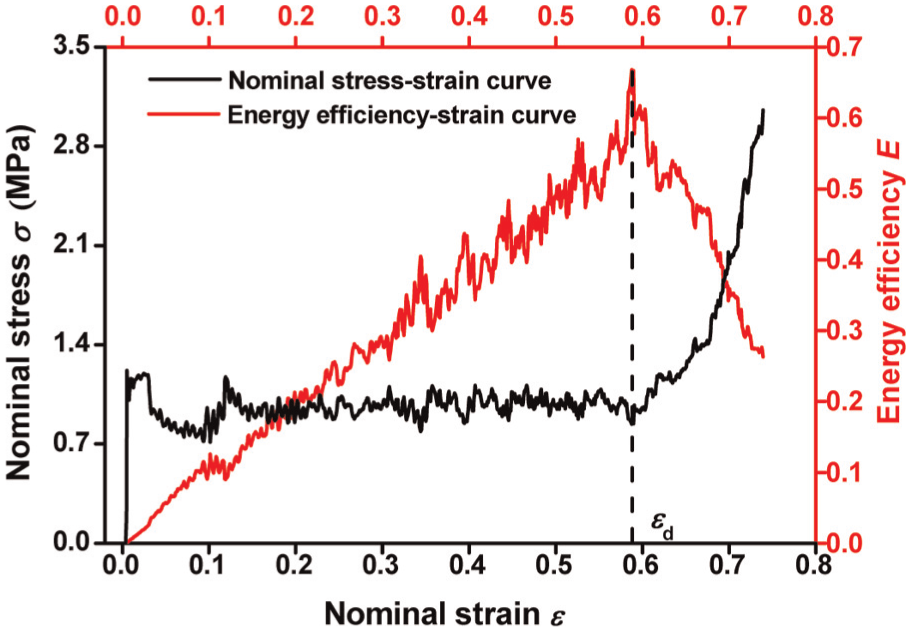
Typical nominal stress–strain curve (the black line) and the corresponding energy efficiency–strain curve (the red line) for SHH.
where ε0 is the initial strain corresponding to the first peak stress. However, during the crushing, ε0 is extremely small and assumed to zero. And εd is the densification strain (i.e. the locking strain). At present, the definition of the value of εd is debatable.33,34 For example, Pattofatto et al. 34 have commented on the parameter identification uncertainty. Some other researchers thought that the densification strain can be given as1,18,23

where λ is a factor depending upon cell micro-structure. For the honeycombs, Gibson and Ashby 1 suggested λ = 1.4. But lots of researches have shown that εd is likely to be a velocity-sensitive quantity, which is mainly affected by the inertia.24,35 If the impact velocity is sufficiently high, it will tend to a certain value. In order to estimate the influence of contrived factors, an absorbed-energy efficiency approach is proposed to calculate the densification strain.22,32–34 Energy absorption efficiency E of cellular solid is defined as the ratio of the absorbed energy up to a given nominal strain εa divided by the corresponding stress value σ(εa), as follows

Densification strain εd can be determined as the stationary point corresponding to the maximum efficiency in the energy efficiency–strain curve (indicated by the red line in Figure 5), which is given as

The maximum energy efficiency point is actually the corresponding strain when the opposite faces of the model cells begin to contact. After that, the specimen will be further crushed until the densification. So this method may underestimate the locking strain. In fact, there will be several local maxima on the energy efficiency–strain curve. In this article, the full densification can be determined by the last main local maxima point (the dashed line in Figure 5), with the corresponding strain as the densification strain εd. 22
Numerical results and discussion
Deformation modes of SHHs
For deformation mode of traditionally hexagonal honeycombs, Ruan et al. 18 and Hu and colleagues19,20 have shown that inertia effect plays an important role in the dynamic crushing. When crushing in the y-direction, there will appear three different macroscopic deformation modes (i.e. “X” mode (or “Homogeneous” mode), “V” mode (or “Transition” mode), and “I” mode (or “Progressive” mode)) with increasing the impact velocity. And they indicate that increasing cell-wall thickness of the honeycomb has the same effect as decreasing impact velocity in terms of deformation modes. 18
Although a large number of studies about common honeycombs have been obtained18–26,36 few researchers have touched on hierarchical honeycombs under dynamic crushing. Hence, we perform the investigation on the macro-/micro-deformation behaviors of SHHs under in-plane crushing. For the same whole strain ε = 0.3, the detailed crushing deformation modes of SHHs under different impact velocities are given in Figures 6–9. At a low impact velocity (v = 3 m/s), the “X” shaped localization band is also observed in our simulation for hierarchical honeycombs with γ1 = 0 (i.e. traditional honeycombs) (Figure 6(a)), which shows a well consistence to the simulated results given by Ruan et al. 18 With the increase of the length ratio γ1, it still appears the “X” shaped localization band, but the macro-deformation pattern is changed. When γ1 is lower than a certain value (e.g. γ1 < 0.3), more localized bands occur near the distal end where the cell layers are crushed along the “X” bands (Figure 6(c)) or the impacting end (Figure 6(b)) with increasing the nominal strain. When γ1 is greater than a certain value (e.g. γ1 > 0.3), the local crushing bands initiate from the stationary end and then propagate toward the impacting end until the provisional densification (Figure 6(e) and (f)). Especially, when γ1 is close to a certain value (e.g. γ1 = 0.3), the “X” localization band is not obvious and the macro-deformation is across the whole specimen (Figure 6(d)). It is seen that when the impact velocity is relatively lower, the stress in SHH is macroscopically homogeneous, the deformation is mainly dominated by the quasi-static strength. Consequently, the deformation of SHH is still regarded as the “X” mode (or “quasi-static” mode) at low-velocity crushing, which is similar to the deformation modes of regular honeycombs.18–22 At a moderate impact velocity (v = 14 m/s), the crushing bands of SHHs with different values of γ1 appear first at the proximal end, and the localized “V” band is still observed when γ1 is lower (Figure 7(a)–(c)). However, if γ1 is greater than a certain value (e.g. γ1 ≥ 0.3), the localized “V” band is not obvious (Figure 7(d)–(f)). This deforming pattern is due to the combination effect of the quasi-static strength and the cell micro-structure inertia, which will be reinforced with increasing impact velocities. This deformation is called the “Transitional” mode.
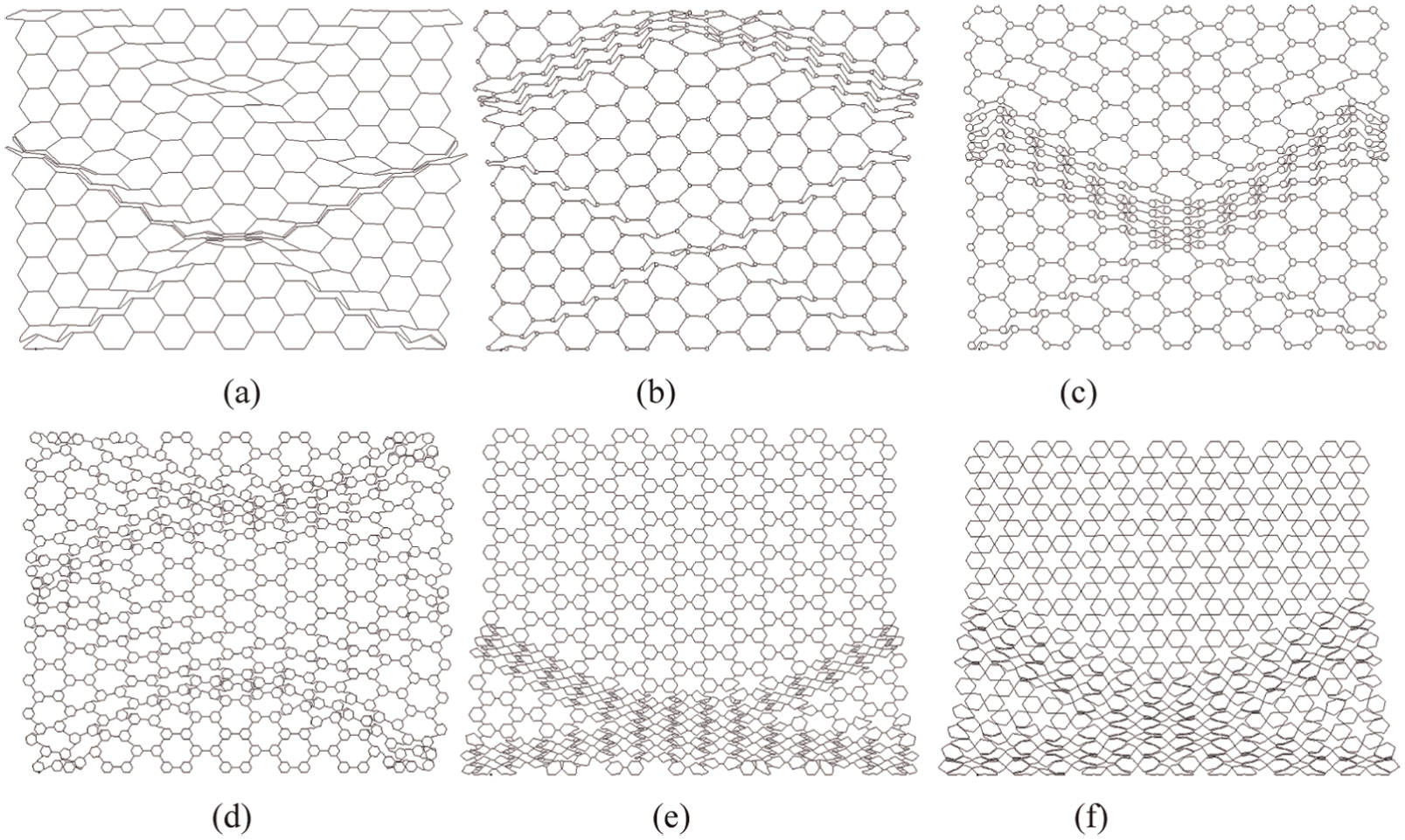
Deformation modes of SHHs with the first-order hierarchy at v = 3 m/s: (a) γ1 = 0, (b) γ1 = 0.1, (c) γ1 = 0.2, (d) γ1 = 0.3, (e) γ1 = 0.4, and (f) γ1 = 0.5.

Deformation modes of SHHs with the first-order hierarchy at v = 14 m/s: (a) γ1 = 0, (b) γ1 = 0.1, (c) γ1 = 0.2, (d) γ1 = 0.3, (e) γ1 = 0.4, and (f) γ1 = 0.5.

Deformation modes of SHHs with the first-order hierarchy at v = 120 m/s: (a) γ1 = 0, (b) γ1 = 0.1, (c) γ1 = 0.2, (d) γ1 = 0.3, (e) γ1 = 0.4, and (f) γ1 = 0.5.

Deformation modes of SHHs with the second-order hierarchy for γ1 = 0.3 at v = 14 m/s: (a) γ2 = 0, (b) γ2 = 0.1, (c) γ2 = 0.125, and (d) γ2 = 0.15.
There are no obvious “X” localized band or “V” localized band through the whole crushing process (Figure 8) when impact velocity is sufficiently higher (v = 120 m/s). The specimen deforms progressively from the proximal end, layer by layer, until to the distal end. Only “I” mode is observed during the crushing, which is similar to other honeycombs.18–24 The influence of structural hierarchy on the whole crushing deformation is negligible. It is because inertia effect overwhelms the effect of quasi-static yielding stress when impact velocity exceeds a critical value (i.e.
To further investigate the influence of structural hierarchy on the dynamic deformation modes of SHHs, Figure 9 shows the detail deformation of the specimens with the second-order hierarchy at v = 14 m/s. During the investigation, γ1 is kept constant with γ1 = 0.3. It is worth noting that SHHs will show the “> <” localized deformation mode at the free boundaries due to the introduction of the second-order hierarchy, which results in lateral compression “shrinkage” phenomenon of auxetic materials.22,32 The deformation becomes more obvious with increasing the value of γ2 under low or moderate crushing velocities. Under high-velocity impacting, inertia effects become more dominant, the deformation gradually concentrates on the proximal end, which is similar to the first-order honeycombs.
From the analysis mentioned above, it can be seen that there will also appear three different types of deformation modes for SHHs with increasing the impact velocity, that is, “Homogeneous” mode (such as “X” mode and “> <” mode), “Transitional” mode (such as “V” mode), and “Progressive” mode (such as “I” mode). It is clear that the dynamic deformation of SHHs mainly depends upon cell hierarchical structures and the impact velocity.
Crushing strength
The crushing strength is a vital parameter in describing the dynamic crushing characteristics of cellular solids,18–24 which has a direct relation of the performance of the bulk material itself, the cell sub-structure, and impact velocity. In this section, the dynamic strength of hierarchical honeycombs can be calculated by equation (5) and the densification strain εd is determined by the energy efficiency method above.
Effect of impact velocity
So far, lots of researchers have systematically investigated the effects of impact velocities on the dynamic strengths of cellular solids.18–24,37 However, it is controversial that whether cellular material is rate sensitive or not. 37 In order to study the effects of impact velocity, several specimens of SHH with different hierarchical parameters are investigated to discuss the effects of impact velocities on crushing strengths of SHHs. In this section, the effect of the bulk material strain hardening is not considered. Based on equation (5), Figure 10 shows the corresponding curves of the crushing strength at both the proximal and distal ends under different impact velocities. Compared to the first-order hierarchical structures, the second-order hierarchical honeycombs are more complex. In order to study the effects of γ2 on the crushing strengths of hierarchical honeycombs, γ1 is kept constant with γ1 = 0.3. For the same hierarchical parameter and bulk material, the crushing strength at the proximal end has an obvious increase with increasing impact velocities. That is to say, the crushing strength at the proximal end is sensitive to the loading rate. However, there is different at the stationary end, the crushing strength tends to be opposite. And it decreases with the increase of impact velocities. The reason can be due to the difference of deformation mechanisms under different impact velocities and relative densities. For the given impact velocity, due to the introduction of hierarchical sub-structures, the dynamic bearing capacity obviously improves compared to traditionally hexagonal honeycombs (γ1 = 0) (Figure 10(a)). And the crushing strength at both ends increases with increasing the value of hierarchical parameters. The larger is the value of hierarchical parameter, the larger is the crushing strength of SHHs.

Variation of the crushing strength at both ends with respect to impact velocity for SHHs: (a) the first-order hierarchy and (b) the second-order hierarchy (γ1 = 0.3).
To further investigate the influence of structural hierarchy on in-plane dynamic strengths of SHHs, Figure 11 illustrates the variation of the crushing strength of SHHs at the impacting end with respect to the length ratio under different impact velocities. When the impact velocity and hierarchical order are given, the crushing strength increases with increasing hierarchical parameters γ1 and γ2, which is the same to Figure 10. But when the length ratio is larger than a certain value (such as γ1 > 0.3 and γ2 > 0.125), the crushing strength will increase slowly. This is partly due to the variation of failure mechanism of hierarchical sub-structures, as well as the relative density of SHHs being larger with the increase of γ. It is seen that the crushing strength of the specimens improves obviously by introducing a hierarchy into traditional honeycombs (Figures 10(a) and 11(a)). For the same impact velocity, the crushing strengths of the second-order SHHs are greater than that of the first-order honeycombs (Figures 10 and 11). Along with the increase of impact velocities, the crushing strengths of SHHs with different hierarchical parameters also improve, which is mainly relation to the inertia (Figure 11).

Influence of hierarchical indexes on crushing strengths of SHHs with different impact velocities: (a) effects of γ1 and (b) effects of γ2 (γ1 = 0.3).
Effect of strain hardening of matrix material
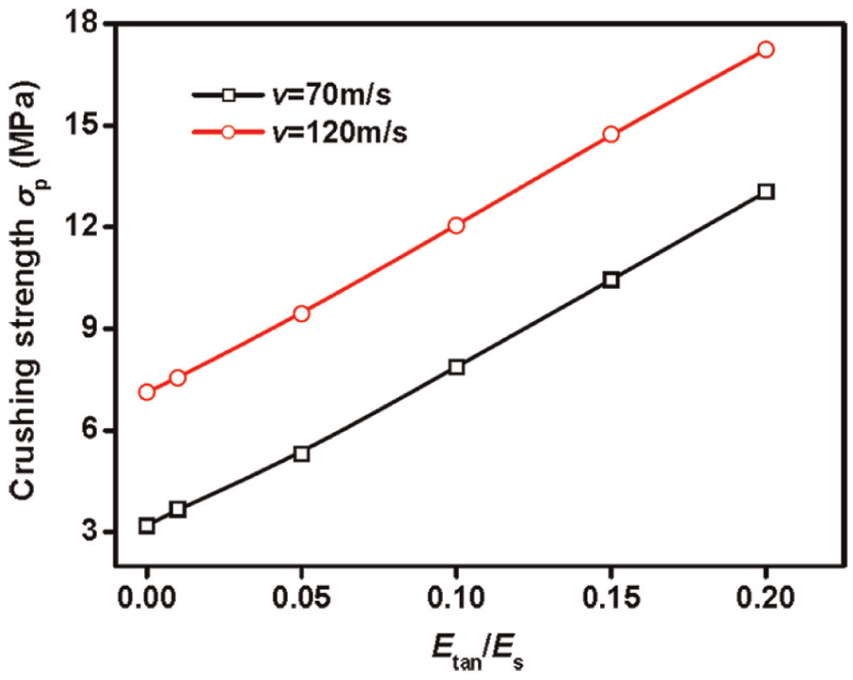
Aiming to investigated the effect of strain hardening of the bulk material on the crushing performances of SHHs, five different hardening rates of the Etan/Es (i.e. 1%, 5%, 10%, 15%, and 20%) are taken into consideration.Etan and Es are tangent modulus and elastic modulus of the bulk material, respectively. According to equation (5), Figure 12 shows the influence of the bulk material strain hardening on the crushing strength of hierarchical honeycombs with different hierarchy indexes at v = 70 m/s. In the figure, the crushing strength of traditional honeycomb is also given for comparison. It is obvious that the crushing strengths for both traditional and hierarchical honeycombs can be improved with the increase of hardening rates of Etan/Es. The stiffness and strength of SHHs are enhanced by the strengthening of the bulk material strain-hardening enhancement, so it improves the dynamic bearing capacity of the whole structure. However, this increase is more significant for SHHs due to the larger number of plastic hinges in the structures which increases the yielding points and therefore results in higher crushing strength. Moreover, the crushing strength also increases with impact velocities for the same hardening rate and hierarchical parameters (Figure 13). It is seen that adding a percentage of strain hardening to the bulk material significantly improves the dynamic crushing resistance of SHHs.

Variation of crushing strength with respect to strain hardening of bulk material for SHHs at v = 70 m/s: (a) the first-order hierarchy and (b) the second-order hierarchy (γ1 = 0.3).
Effects of strain hardening of bulk material on crushing strength for SHHs with γ1 = 0.3 under different impact velocities.
Effect of cell-wall ratio of thickness to length
A large number of studies have shown that the cell-wall ratio of thickness to length (t0/l0) (i.e. the relative density) is an important index in describing the dynamic crushing of cellular solids.18–24 They found that the crushing strengths are related to the ratio of t0/l0 by a power law for a given impact velocity and they are proportional to the square of impact velocity at a high crushing loading.18,21–24 In the present article, the original cell-wall length is kept constant with l0 = 10 mm, and the edge thickness (t0) is from 0.5 to 2 mm. The effects of cell-wall thickness on the crushing strengths of SHHs are investigated in detail. The effect of the strain hardening of the bulk material has not yet been considered. And the corresponding crushing strengths of the specimens with γ1 = 0.3 under different crushing velocities are listed in Table 2.
The crushing strength of SHHs with γ1 = 0.3 under different impact velocities (MPa).

Figure 14 shows the variation of the crushing strengths at the proximal end versus impact velocities for the specimen with different t0/l0. For the same cell-wall thickness, it is seen that the crushing strengths of SHHs are also proportional to the square of impact velocity, which is the same to conventional honeycombs.18–21 Under the conditions that the hierarchical parameters except t0/l0 and impact velocities are all the same, the crushing strength improves with the increase of t0/l0. Figure 15 gives the corresponding relation curves of σp/σys versus t0/l0 under different impact velocities in the double logarithmic plot, where σys is the yielding stress of the bulk material. In the figure, the relative crushing strengths from FE simulations are symbolized as different shapes. When other micro-cell parameters except t0/l0 and the impact velocity are kept constant, σp/σys show a general good correlation to the ratio of t0/l0 by a power law, which can be expressed as

where C is a constant and m is an exponent which mainly depends upon the hierarchical parameters and impact velocities. The corresponding fitting curve is also given in Figure 15. When impact velocity is given, it is seen that σp/σys still increases with t0/l0 by a power law for SHHs. At low-velocity or quasi-static crushing, the power exponent m is equal or close to 2. Along with the increase of the impact velocity, the exponent m gradually reduces. At high-velocity crushing, the exponent will tend to 1. Research results show that there is also the same rule for other SHHs.
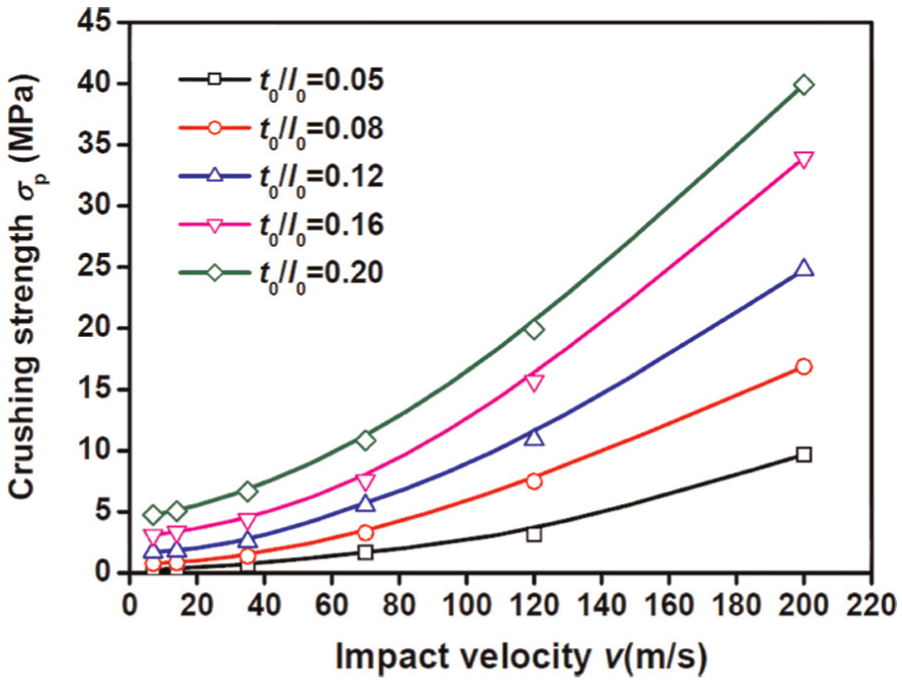
Variation of crushing strength for SHHs versus impact velocity with different ratios of thickness to length t0/l0.

Plot of σp/σys versus t0/l0 under different impact velocities.
Energy absorption
As to the weight-sensitive applications, the SAE, Em, is usually considered in characterizing the absorbed-energy capacity of cellular solids, which is given as15–17,24,38

where Δρ is the relative density of cellular structures, and ρs is the density of the bulk material. EV is the densification strain energy, which can be defined as

with εd is the densification strain.
Based on equations (10) and (11), the SAE of SHHs with the first-order hierarchy under different impact velocities is numerically investigated (Figure 16). It is seen that under the conditions that the cell-wall thickness, the impact velocity, and the bulk material are all the same, the structural hierarchy has an important influence on the SAE of SHHs. Due to the introduction of hierarchy into the vertexes of traditional honeycombs, the absorbed-energy capacity of SHHs significantly improves compared to regularly hexagonal honeycombs (γ1 = 0). The reason is that when one level of hierarchy is introduced to the edge vertex of a traditional honeycomb with a new hexagon, in fact, we are increasing the total number of the plastic hinges in the whole structure, and therefore increasing the energy absorption of the specimen. On the other hand, adding hierarchical sub-structures into cellular structures has been credited with improving elastic properties and damage tolerance. For a certain compressive strain (ε = 0.6), Figure 17 gives the variation between the SAE and γ1 for SHHs under different impact velocities. Numerical results show that when γ1 is less than a certain value (in this work, γ1 is about 0.3), the absorbed energy of SHHs increases with increasing γ1 (Figure 17). However, if γ1 exceeds 0.3, the SAE starts to decrease. This is partly related to the deformation mechanism of cell micro-structures, as well as the relative density of being larger with increasing hierarchical parameters. Along with the increase of impact velocities, the effects of structural hierarchy on the SAE are relatively weakened.
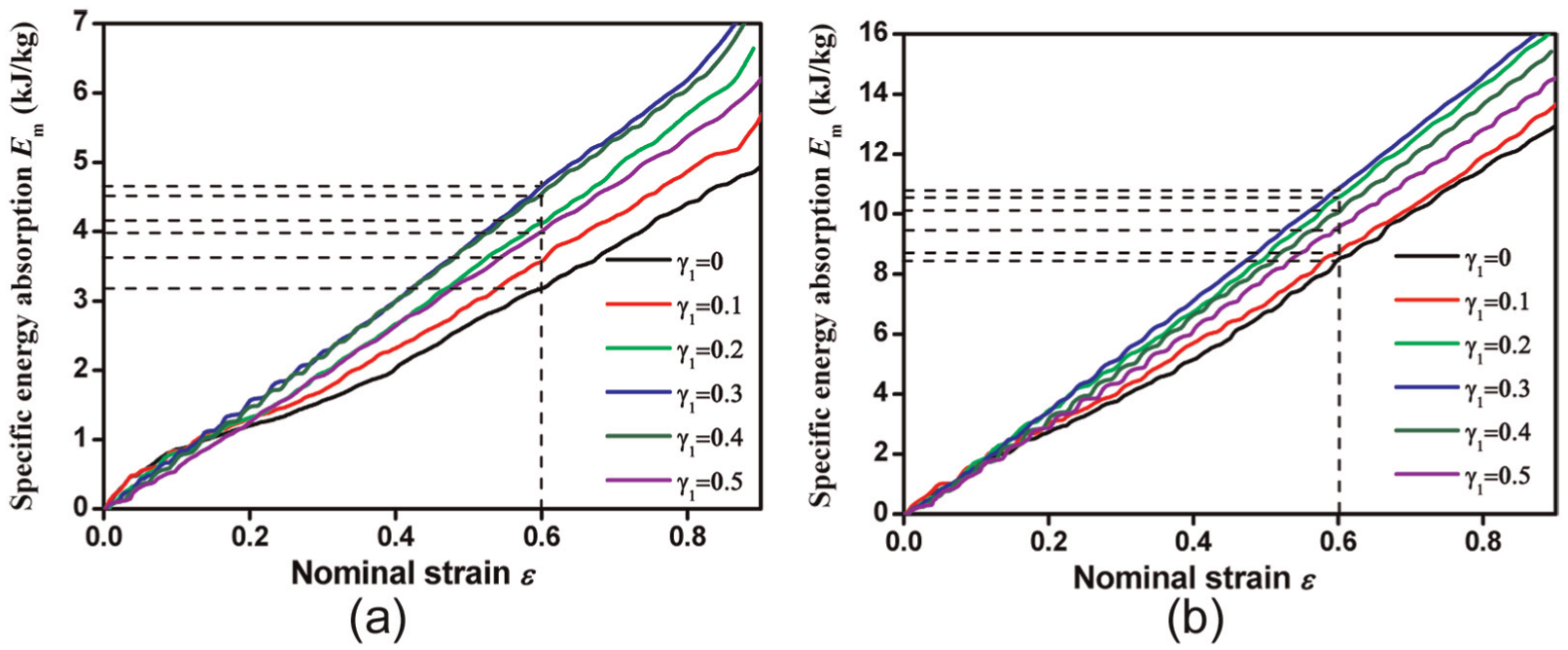
Energy absorption for SHHs with the first-order hierarchy under different impact velocities: (a) v = 70 m/s and (b) v = 120 m/s.

Variation of the specific energy absorption versus γ1 for SHHs.
Figures 18 and 19 show the SAE of SHHs with the second-order hierarchy under different impact velocities. In this investigation, γ1 is still kept constant with γ1 = 0.3. It is the same to the first-order hierarchical honeycombs. Due to the introduction of the second hierarchy, the energy absorption capacity of SHHs also increases compared to the first-order ones. The absorbing energy of SHHs first increases with increasing the value of γ2 and then decreases when γ2 is larger than a certain value (in this work, γ2 is about 0.125). It is seen that there will be an optimal value of γ1 and γ2, which is helpful to multi-objective dynamic optimization design of cellular solids.
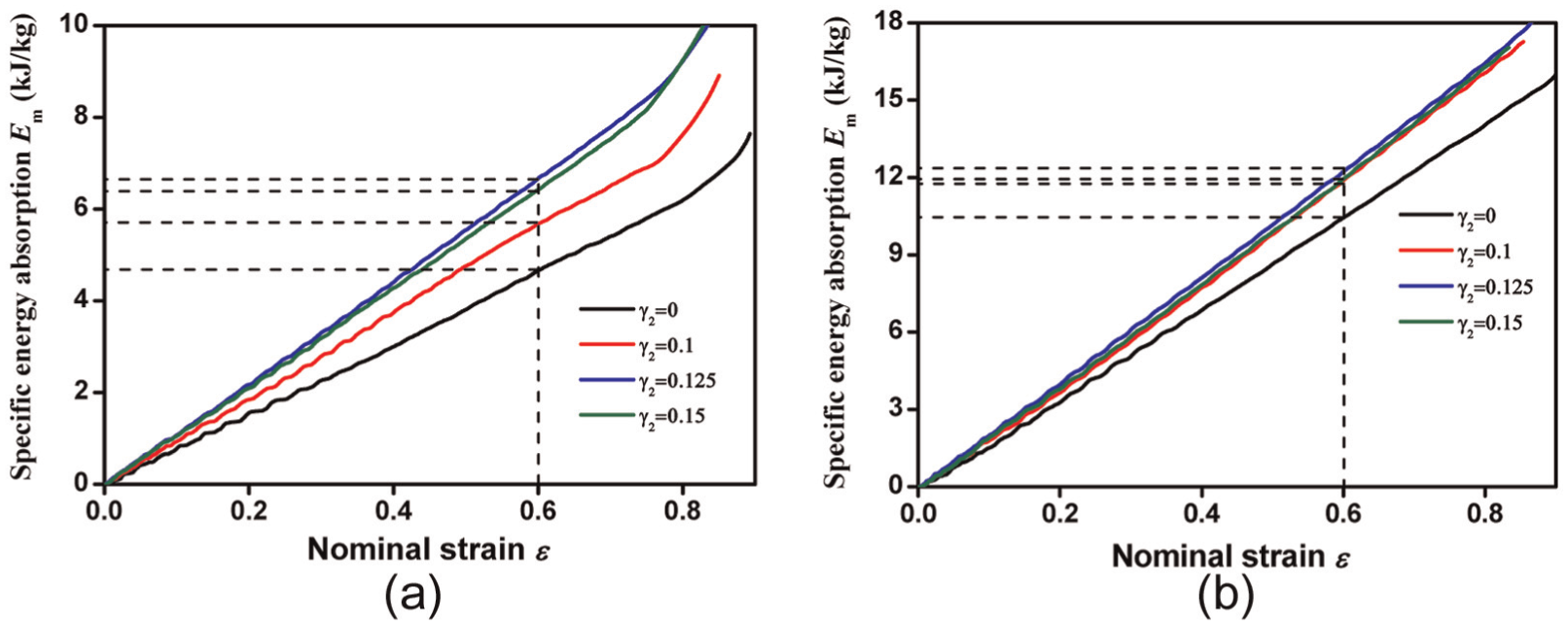
Energy absorption for SHHs with the second-order hierarchy for γ1 = 0.3 under different impact velocities: (a) v = 70 m/s and (b) v = 120 m/s.

Variation of the specific energy absorption versus γ2 for SHHs (γ1 = 0.3).
Dynamic shock enhancement
From the numerical results and discussions as mentioned above, it is seen that both the crushing strengths (Figure 12) and the SAE (Figures 16 and 18) of SHHs are enhanced with increasing impact velocities. This dynamic shock enhancement is mainly induced by the inertia of cell micro-structures. The shock enhancement phenomenon of cellular materials under dynamic loadings is usually evaluated by the crushing enhancement index (ξ), which can be determined as 39

where σdp and σsp are the dynamic strength of cellular materials under in-plane crushing and quasi-static loading, respectively.
Lots of researchers have shown that when the impact velocity is lower than the “wave trapping” speed (i.e.
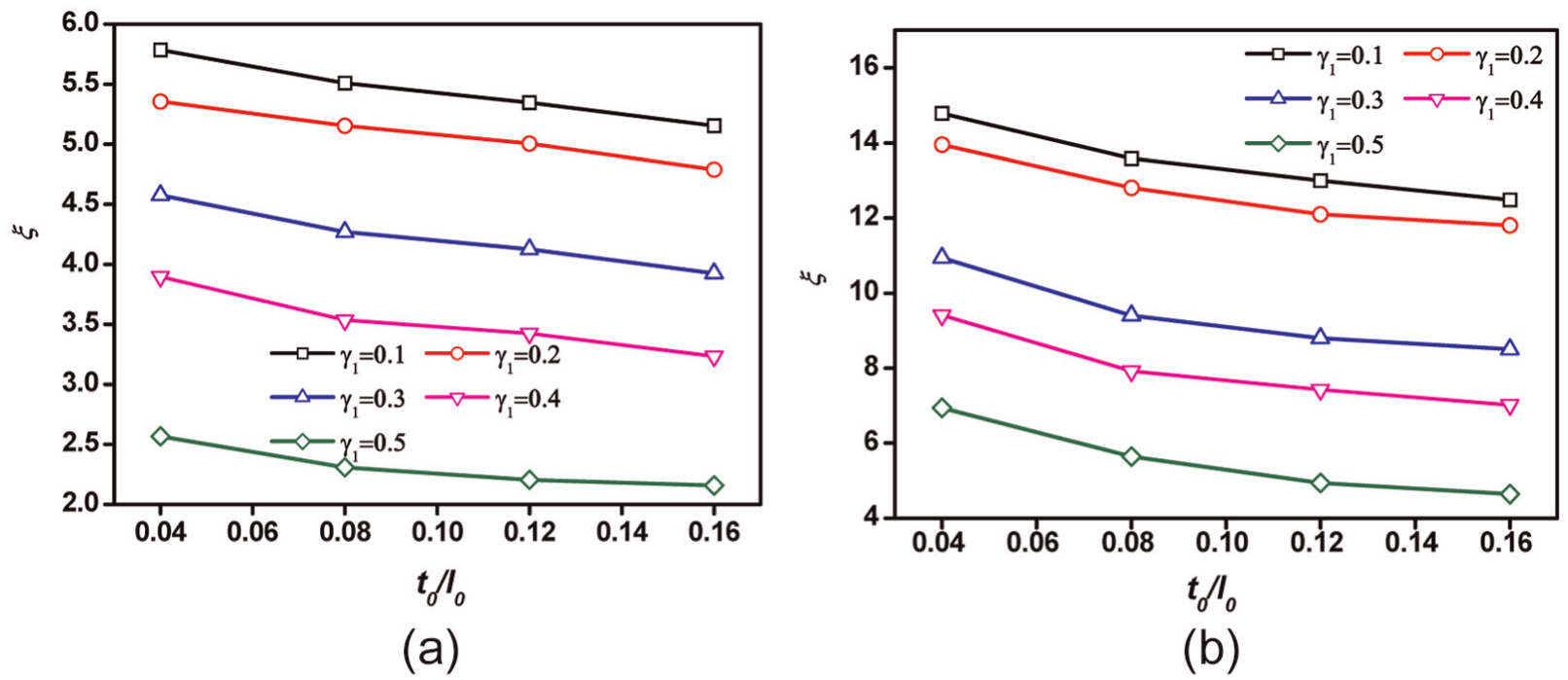
Dynamic enhancement sensitivity of SHHs under different impact velocities: (a) v = 70 m/s and (b) v = 120 m/s.
Conclusion
In order to improve the in-plane dynamic load-bearing and energy absorption capacities of traditionally hexagonal honeycombs, one kind of SHH is proposed by substituting the cell-wall vertexes of a regular honeycomb with smaller self-similar hexagons of the same orientation. The influences of hierarchical parameters, bulk materials as well as impact velocities on the in-plane dynamic crushing and energy absorption characteristics of SHHs are numerically studied. Based on the simulation results and discussions, the following conclusions can be drawn.
Except the impact velocity, the crushing deformation modes of SHHs mainly depend upon hierarchical parameters and hierarchical orders. Adding the hierarchy into the hexagonal honeycombs causes the variation of local stress dynamic evolution during the crushing. For hierarchical honeycombs, there will be three different types of deformation modes (“Homogeneous” mode, “Transitional” mode, and “Progressive” mode) with increasing impact velocities, which is similar to traditionally hexagonal honeycombs. It is worth noting that the second-order hierarchical honeycombs will exhibit “> <” localized deformation mode at low or moderate crushing velocities, which results in lateral compression “shrinkage” phenomenon of auxetic materials. This phenomenon becomes more obvious with increasing γ2. Along with the increase of impact velocity, the deformation gradually concentrates on the proximal end. The inhomogeneity caused by the local stress dynamic evolution is relatively weakened.
Numerical analysis indicates that both the crushing strengths at the impacting end and the energy absorption capacities of SHHs will be improved by adding a new self-similar hexagon into traditionally hexagonal honeycombs. This is partly due to the increase in the total number of plastic hinges in the honeycombs, as well as the relative density of SHHs being larger by adding hierarchical sub-structures to honeycombs. The crushing strength of SHHs with the second order is greater than that of the first-order honeycombs for the same impact velocity. Moreover, adding a percentage of strain hardening to the bulk material significantly improves the crushing strengths and energy absorbed capacities of SHHs. This dynamic enhancement is caused by the inertia of cell micro-structures and mainly depends upon the hierarchical sub-structures and impact velocities. The crushing strengths at the impacting end show a good correlation to the ratio of cell-wall thickness to length (t0/l0) by a power law for a given impact velocity. When the hierarchical parameters are kept constant, the crushing strengths are also proportional to the square of impact velocities. These results will provide some useful guides in the multi-objective optimization dynamic design of hierarchal honeycombs.
Footnotes
Acknowledgements
The financial contributions are gratefully acknowledged
Academic Editor: Yucheng Liu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (nos 11402089, 51675179), the Natural Science Foundation of Hebei Province of China (no. A2017502015), and the Fundamental Research Funds for the Central Universities of China (no. 2014ZD36).