
Abstract
In this article, efficient multi-point infill criteria based on multi-objective optimization front and its applications on analytic functions and airfoil aerodynamic shape optimization are researched. In the expensive optimization, an excellent infill algorithm should meet the demand of local exploitation and global exploration at the same time, which stand for the optimization accuracy and efficiency, respectively. In the proposed infill criteria, the predicted value and a statistic variable are chosen as objectives to implement optimization, and the obtained front stands for the points which strike a balance between local optimization accuracy and global optimization efficiency. The test results of four analytic functions, which has 2 to 20 variables, show that compared with expected improvement algorithm, the proposed multi-point infill algorithm can save 85% iteration times, so the computation efficiency could be increased remarkably. The airfoil optimization design is adopted to test the validity and efficiency of the proposed infill criteria. In the airfoil optimization design, the computational fluid dynamic method is employed to obtain the aerodynamic forces of airfoils, and the Kriging surrogate model is introduced to reduce the computational cost. The global optimization is implemented by adopting multi-objective evolutionary algorithm based on decomposition as optimization algorithm, and the drag coefficient and section area of the airfoil are taken as optimization objectives. The proposed infill method and expected improvement method are employed to implement the optimization design process. With roughly equal times of aerodynamic computation, both of the algorithms can obtain the reliable Pareto front; however, the number of infill iteration of proposed infill method is only 17% of that of expected improvement method.
Keywords
Introduction
The surrogate models introduced during expensive optimization design can efficiently deal with the conflict objectives, such as computational efficiency and accuracy, so they are widely used in expensive optimization design problems.1–6 To construct the surrogate model, the first step is to choose a number of typical samples from design space, and then their responses to objective are computed by proper analysis tool with certain precision. After that, some mathematical approaches such as interpolation and fitting are employed to construct the surrogate model based on these responses of typical samples. Theoretically, with sufficient well-distributed samples, the surrogate model would be accurate enough and can be utilized to replace real analysis model to predict the response of arbitrary sample. However, for practical applications, without the knowledge of the objective function’s properties, it is hard to describe its global characteristics with few sample points. If large number of samples are used to construct the surrogate model, that would result in great computational cost. To overcome this conflict when utilizing the surrogate model to perform the global optimization design, the general approach is as follows. First, the initial surrogate model is established by a few samples, and the initial number of samples is suggested to be
The EGO algorithm proposed by Jones et al. 9 shows that infill criteria should balance the global exploration and local exploitation when determining the positions of the samples. The global exploration focuses on improving the precision of positions with relatively large uncertainty, while the local exploitation focuses on the positions near the optimal design. Mockus et al. 10 proposed the famous “expected improvement” (EI) infill criteria, which try to improve the precision of the surrogate model by searching for the position with the largest EI value on the design space. Since it well balances the global exploration and local exploitation, this approach is broadly utilized.11–13 However, the EI method converges slowly and is inefficient, which limited its application on expensive optimization design problems. 14 To improve the computation efficiency, researchers propose some advanced infill criteria based on the EI criteria, such as augmented EI criteria 15 and bootstrapped EI criteria. 16 These new EI methods can improve the computation efficiency in certain extent; however, they make some problems such as computation stability and robustness.
Along with the development of computation hardware and parallel computation methods, the multi-point infill criteria has been well developed. Z Feng et al. 17 proposed a novel multi-point infill sequential optimization method. In this method, the samples are obtained from the approximated Pareto front of two objectives which is the two terms of the EI function. By following the approach given in Feng et al., 17 efficient multi-point infill criteria based on multi-objective optimization front are proposed in this article, and its application on aerodynamic shape optimization is also researched to verify the algorithm.
The remainder of this article is arranged as follows. In the next section, the details of the Kriging surrogate model and multi-point infill criteria are illustrated. Next, four typical analytic functions are employed to test the proposed infill criteria. Then, the multi-point infill criteria proposed in this article are applied to two-dimensional airfoil aerodynamic shape optimization. This article ends with the main conclusions and recommendations for future work.
Multi-point infill criteria based on multi-objective optimization front
Kriging surrogate model
The surrogate models are mathematically constructed approximation models, which have lower computation cost but with high accuracy when compared with numerical analyzing or physical experimentation results. Surrogate models are mainly divided into response surface methods (RSM), radial basis functions (RBF), artificial neural networks (ANN), and Kriging models. Compared with the RSM and RBF, the ANN is more suitable to deal with strong nonlinearity and multi-dimensional problems. However, prediction accuracy and robustness of the ANN are inferior to the Kriging method. 18
The Kriging method is utilized to replace the aerodynamic analysis tool to construct the surrogate mode, which is briefly given as follows. In the Kriging model, the relationship of the attributive and independent variables is given by 19

where

where
Actually, for the specified regression model and the relative model type, the correlation matrix R and the predicted values
Multi-point infill criteria algorithm
Note that the predicted optimal value

The multi-objective evolutionary algorithms based on decomposition (MOEA/D) are utilized to perform the multi-objective optimization. According to the obtained Pareto front, the correlated samples are deleted. 22 Details of the multi-point infill sampling procedure are given as follows (Figure 1):
Use MOEA/D to optimize the problem in equation (3). Samples on the Pareto front are taken as sampling candidates.
Two end points of the Pareto front are directly taken as samples, since they indicating the current optimal objective function and maximum uncertainty, respectively.
Delete the candidates that correlated with the current sample set.
Delete the correlated samples in the candidate sample set.
K denotes the number of samples added during each iteration. If the candidates’ number is smaller than K, then all candidates are taken as samples. Otherwise, increases the correlative estimation critical distance

Algorithm procedure of multi-point infill criteria based on multi-objective optimization front.
In the previous procedure, distance between any two samples is defined as

where
Then, any two samples are termed as correlated when d in equation (4) is smaller than the specified critical distance
Algorithm test
Test functions
Four typical analytic functions are chosen as the test functions, of which three functions have two design variables, and one function has 20 variables to test the ability of the proposed method dealing with complicated-dimensions problem:
Six-hump camel-back (SC) function

Branin (BR) function

Goldstein–Price (GP) function
Styblinski–Tang (ST) function

The global optimal solutions and corresponding function values of the test functions are given in Table 1.
The optimal solutions and corresponding function values of the test functions.

SC: six-hump camel-back; BR: Branin; GP: Goldstein–Price; ST: Styblinski–Tang.
Test method and criterion
The computation condition during the iterations is illustrated as follows. The number of initial samples for SC and BR function is 25. Because of the nonlinear character of the GP and ST function, the number of initial samples for these two functions is relatively large, namely, 100 and 700, respectively. For each function, the initial samples obey the uniform distribution on the design space. For SC, BR, and GP functions, the number of samples added during each iteration K is 5, and for ST function, K is 10. The convergence condition is given by

where
Three factors are utilized to evaluate the infill criteria. First, the relative error between predicted and real optimal function values
Test results
The classical EI infill criterion is employed to improve the accuracy of the Kriging model to compare to the proposed multi-point infill criterion. Except for the different iteration algorithms, the two infill sampling processes have the same computation condition, including the number of initial samples, the initial distribution of samples, convergence condition, and so on. The iteration results of three test functions using EI method and proposed multi-point infill criterion are depicted in Table 2. For SC and BR function, the results are similar. The relative errors
The iteration results of test functions using two infill algorithms.
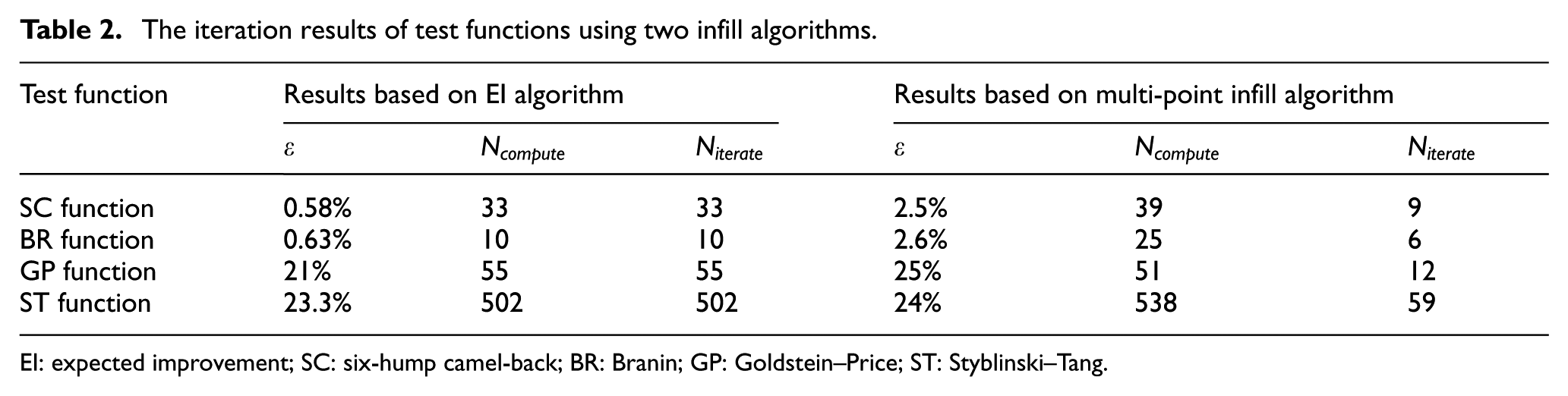
EI: expected improvement; SC: six-hump camel-back; BR: Branin; GP: Goldstein–Price; ST: Styblinski–Tang.
In summary, compared with EI algorithm, the proposed multi-point infill algorithm might need slightly more computation quantity to achieve the same level of predicted precision, but it can save much more iteration times (actually the number of iteration decreases about 85% on average), so the computation efficiency could be increased remarkably.
Application research on airfoil aerodynamic shape optimization design
According to the conclusion of the section above, the multi-point infill criteria can increase the computation efficiency remarkably, which is vital to expensive optimization. However, is the conclusion still effective for real complex physical problem? So in this section, an application research of the multi-point infill criteria on two-dimensional airfoil aerodynamic shape optimization problem is implemented to test its performance.
Aerodynamic shape optimization design problem
Geometry representation of the airfoil
Airfoil optimization design requires an efficient geometry representation method. The class function/shape function transformation (CST) method 23 is adopted to generate the airfoil curves. The four-order Bernstein polynomial is utilized to approximate the upper and lower airfoil outline curves. The exponential of the class function and the height of the curve’s aft end are both fixed. To approximate the real airfoil, the first four Bernstein polynomial coefficients of the upper and lower curves are set as opposite and their fifth polynomial coefficients are set as equal. The five Bernstein coefficients and their ranges are given in Table 3. Two typical airfoil curves are depicted in Figure 2. As it shows, it is very convenient for the CST method to generate abundant airfoil curves.
Bernstein coefficients and their ranges of the airfoil.


Typical airfoil shape based on CST method.
Definition of optimization design problem
Computation conditions of the optimization design problem are set as Mach number

Aerodynamic model and its validation
Aerodynamic model
The aerodynamic problem of supercritical airfoil can be considered as a two-dimensional viscous compressible turbulent flow. The commercial software FLUENT is used to evaluate the aerodynamic performance of each sample design.
Aerodynamic model will be employed many times to analyze the aerodynamic force during the optimization design process, so the aerodynamic model should be as simple as possible to make the price of every single aerodynamic analysis small. But the computation price is just one thing, the accuracy of aerodynamic analysis is also a crucial factor. Unfortunately, the computation price and accuracy of aerodynamic analysis always conflict. The main factors in aerodynamic model influencing computation price and accuracy include computing grids, difference scheme, and turbulence model. Before formal computation, some research about influence of these factors is implemented. The study subject is the typical supercritical airfoil NASA SC(2)-0518.
Three elements of computing grids, namely, the number of circumference nodes (nc), the height of the first grid close to the wall boundary (h1), and the increase rate of grids along normal direction (k) are chosen to research the convergence of computing grids, and three nc values, three h1 values, and seven k values are considered. Twelve grids with different elements are used, and results of Mesh0 whose grid number is the largest are considered as the reference value. Table 4 shows the research results. According to the table, the drag coefficient Cd is not sensitive to nc, so for the sake of low computation price, nc is set to be 215. The height of the first grid h1 and the increase rate k can influence Cd obviously, and for the sake of computation accuracy, h1 is set to be 1e−5, and k is set to be 1.3.
The results of convergence research of computing grids.

The first-order and second-order upwind difference scheme, and Spalart–Allmaras model and Euler model are adopted to research the influence of difference scheme and turbulence model on aerodynamic character, respectively. The wall pressure distribution of airfoil with the condition of different difference scheme and turbulence model is given in Figures 3 and 4. According to the figures, both difference scheme and turbulence model can influence the wall pressure, especially the upper surface pressure, significantly. Since the computation accuracy is the first place to consider, the second-order upwind difference scheme and Spalart–Allmaras turbulence model are chosen for aerodynamic analysis.

The influence of difference scheme on wall pressure.

The influence of turbulence model on wall pressure.
In summary, the second-order upwind difference scheme is adopted for the convection term, and the turbulence model used in this article is Spalart–Allmaras. There are two types of boundary condition, pressure far field and wall. The former corresponds to the outer boundary of computational domain, and the latter corresponds to the surfaces of airfoil. To obtain high-fidelity aerodynamic results, structural C-type grids which cluster round surfaces of the airfoil, are constructed. The numbers of circumferential and radial nodes are 215 and 47, respectively, and the increase rate of grids along normal direction is 1.3. The total number of grid cells of each computational case is about 10,000. The typical computational grids are shown in Figure 5.

Computational grids.
Validation of aerodynamic model
The flow problem of typical supercritical airfoil NASA SC(2)-0518 24 is employed to verify the accuracy of the results obtained by the computational fluid dynamic (CFD) simulation. Comparison of the results is depicted in Figure 6, where the hollow squares denote the ones obtained from the proposed method and hollow deltas denote the ones obtained from Zhou and Zhou. 24 In the figure, five angles of attack are computed at the given flow condition. As it shows, at the condition of small angle of attack, the CFD results obtained are accurate.

Validation of drag characteristic of NASA SC(2)-0518 airfoil.
Optimization algorithm and design process
Optimization algorithm
The MOEA/D is utilized to perform the global optimization. Zhang and colleagues25,26 pointed out that MOEA/D was simple to code and with a high computational efficiency, besides the obtained optimal Pareto front points distributed uniformity. MOEA/D utilizes traditional decomposing strategy, such as Tchebycheff method, to divide the multi-objective optimization problem into multiple single-objective optimization problems, which are simultaneously optimized by the evolutionary algorithms, please refer to Zhang and Li 25 for the details.
Optimization design process
The Kriging surrogate model and MOEA/D are utilized to optimize the two-dimensional transonic airfoil, and the optimization design process is illustrated in Figure 7. First, the Latin hypercube method is used to select 61 initial samples in the design space. CFD and computer-aided design (CAD) are then utilized to compute their objective characteristic (drag coefficient and section area). Second, the Kriging surrogate model is constructed based on the current samples. If the constructed Kriging model satisfies the required design precision, then it can be used in the MOEA/D to design the two-dimensional transonic airfoil. Otherwise, the multi-point infill criteria based on multi-objective optimization front depicted in Figure 1 are utilized to refine the Kriging model iteratively until the precision of surrogate model meets the requirement.
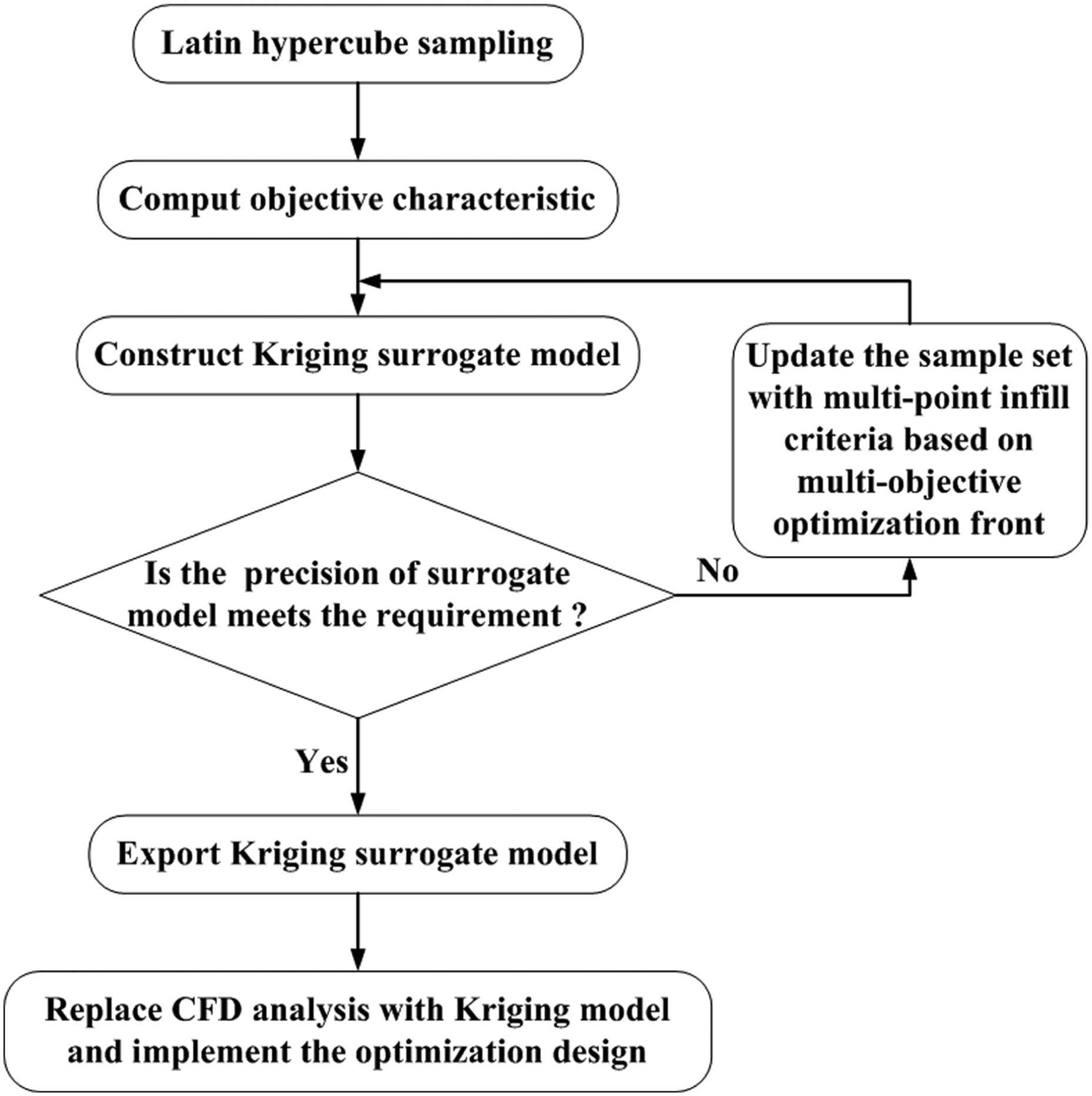
Optimization design process.
During the optimization design procedure, the mean error is used to determine the precision of the surrogate model, which is defined as

where
Optimization design results
Improvement of the accuracy of surrogate model based on multi-point infill criteria
The modification process of the accuracy of surrogate model is a key technique for aerodynamic shape optimization design problem. Numerical results show that the multi-point infill criteria proposed in this article can improve the accuracy of surrogate model efficiently. During the iteration, the number of samples added during each iteration is set to be 6, and after 12 infill iterations, the constructed surrogate model can satisfy the required precision.
The accuracy evolution process of drag coefficient surrogate model is illustrated in Figure 8. If the model has enough accuracy, the error between predicted and true drag coefficients should be minor, so the data points on the figure should be gathered close to the 45° oblique line. Otherwise, the data points should be far away from the oblique line. It can be seen from the figure, when the initial amount of samples is 61, the surrogate model can approximately reflect the character of drag coefficient; however, a few samples with major error exist. After three times of iterations, and the amount of samples comes to 78, the distribution of data points is still dispersed, but the trend of the data points gathers to the oblique line in some certain extent. After another six times of iterations, and the amount of samples comes to 107, the data points approach to the oblique line closer. When the amount of samples increases to 121, almost all of the data points have already concentrated around the 45° oblique line, so the surrogate model should be accurate enough to replace CFD model to analyze the aerodynamic character of airfoils.

Accuracy evolution process of surrogate model.
The above adding points process has revealed that the surrogate model becomes accurate and reliable piece by piece as the increasing amount and reasonable distribution of samples on the design space. This trend can be obviously illustrated from Figure 9. When the initial amount of samples is 61, the mean error is 22.1%, which is relatively large. As the amount increases, the mean error decreases gradually, and when the amount increases to 121, the error reduces to 8.95%.

Evolution process of mean error of surrogate model.
Optimization design results of airfoil
The optimized two-dimensional transonic airfoils are illustrated in Figure 10, where the solid dots denote the samples and the solid line denotes the Pareto front based on proposed method. In the optimization process, the population size used in MOEA/D is 1000. As illustrated in Figure 10, the three optimized typical airfoils on the Pareto front are as follows: (1) CaseA, which has the minimum drag coefficient and the minimum section area, identified by solid circle; (2) CaseB, which has the compatible section area and drag coefficient, identified by solid pentagram, and (3) CaseC, which has the maximum section area and the maximum drag coefficient, identified by solid square. The samples with extreme objective characteristic are identified by lines with arrows, where Case1, Case2, and Case3, respectively, denote the airfoils with the minimum section area, the minimum drag coefficient, and the maximum drag coefficient and section area simultaneously. The distribution of samples in the objective space indicates that the drag coefficient and section area of the two-dimensional transonic airfoils are strongly conflict with each other, which makes necessity of the multi-objective optimization. Many design points with consideration to both of two objective characteristics are obtained, and the distribution of Pareto front in the objective space indicates that the two objective characteristics of these design points can be improved at the same time. The designers can chose the proper points from the Pareto front as the optimal design results depending on the specific circumstances.
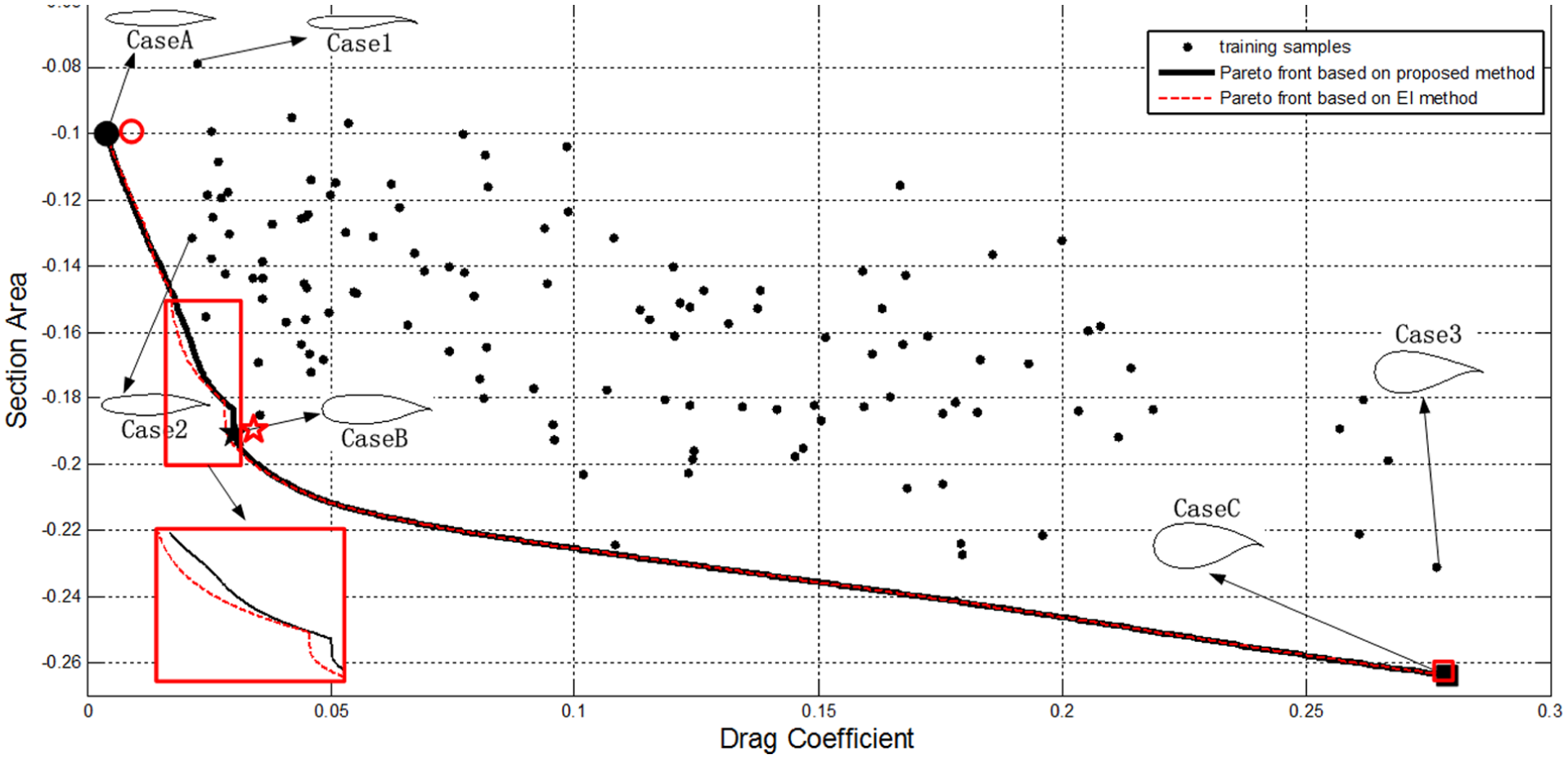
Results of airfoil aerodynamic shape optimization problem based on proposed method and EI method.
The EI method is used as infill criterion to replace the multi-point infill criteria to implement the optimization design process (as shown in Figure 7), and the corresponding Pareto front is shown in Figure 10, which is identified by red dotted line. According to the figure, the two Pareto fronts based on proposed method and EI method are similar. The discrepancy distributes nearby the CaseB, which can be obviously seen in the magnifying figure (as shown in red rectangle). As to the convergence process, taking drag coefficient surrogate model for consideration as well, the number of objective computation is 121 and 132 for proposed method and EI method, respectively, while the number of infill iteration is 12 and 71, respectively.
To validate the computation accuracy of optimization design based on Kriging model, three typical shapes on the Pareto front are chosen as the test case, namely, CaseA, CaseB, and CaseC. The computation results of two objectives with Kriging surrogate model (KG) and physics model (CFD for drag coefficient computation, and CAD for section area computation) are illustrated in Table 5. It is obvious that under the same number of samples and distribution, the errors of section area between Kriging model and CAD model are much smaller than that of drag coefficient between two types of models. The reason is that the relation between section area and design variables is much more closer, and in fact, section area can be given by exact expression of the design variables, while the nonlinear characteristics between drag coefficient and design variables are more intense. As to drag coefficient, the predicted error based on Kriging and CFD model for CaseC, CaseB, and CaseA, are namely 0.24%, −4.72%, and −7.23%. In the table, the plus sign means that the predicted value is larger than the CFD analytical one, and the minus sign means that the predicted value is smaller than the CFD analytical one. The predicted error of CaseA is the most. However, the errors of the three airfoil are both less than 8%. This level of error can satisfy the requirement of engineering design, and it shows that the optimization design results based on Kriging model and multi-point infill criteria are reliable. In addition, the exact objective values obtained by CFD and CAD tools of the three typical airfoils are plotted in Figure 10, which is identified by red hollow circle, pentagram, and square.
The comparison of objective predicted values based on Kriging surrogate model and physics model.
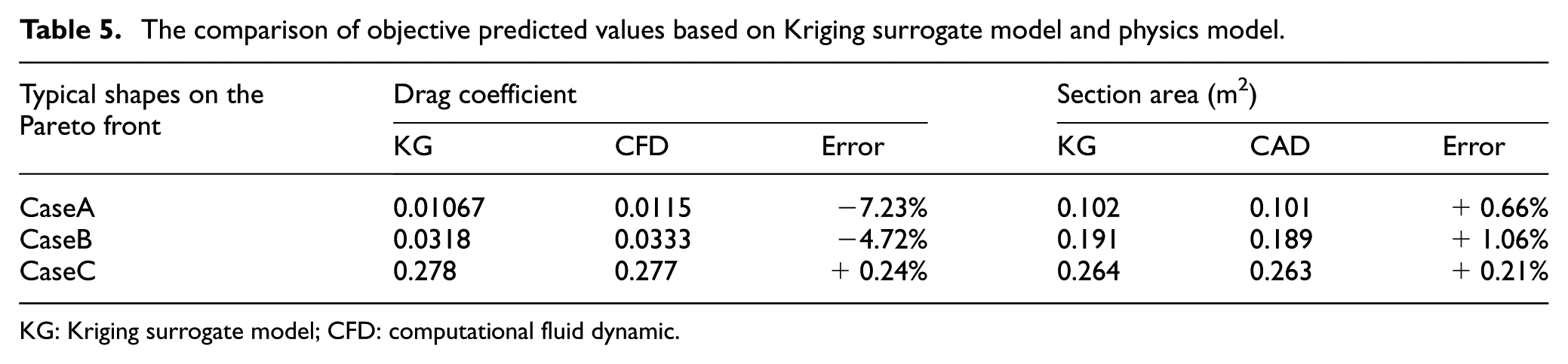
KG: Kriging surrogate model; CFD: computational fluid dynamic.
Conclusion
In the present study, efficient multi-point infill criteria based on multi-objective optimization front were proposed, and its applications on analytic functions and airfoil aerodynamic shape optimization were also researched. In the proposed infill criteria, to search for several appropriate added points in single iteration, the predicted optimal value based on the current Kriging model and the standard derivation, which reflected the local exploitation and global exploration abilities, respectively, were chosen as the optimization objectives. The multi-objective optimization front obtained by MOEA/D indicated the points which striked a balance between local optimization accuracy and global optimization efficiency. So with the proposed infill criteria, the optimization process based on surrogate model could be accelerated and the precision of the surrogate model could be improved.
Four analytic functions and the transonic airfoil aerodynamic shape optimization problem were chosen to test the validity and efficiency of the proposed infill criteria. The results of three simple analytic functions with two variables showed that compared with EI algorithm, the proposed multi-point infill algorithm could save much more iteration times, so the computation efficiency could be increased remarkably. The test of analytic function with 20 variables obtained the same conclusion, and it proved the strong compatibility of the proposed algorithm dealing with the complex problem with numerous variables. According to the results of transonic airfoil aerodynamic shape optimization, the surrogate model became accurate by the proposed infill criteria, and the reliable Pareto front was obtained based on surrogate model and MOEA/D. Compared with EI algorithm, the number of infill iteration of proposed infill method is only 17% of that of EI method.
There were two problems need to be researched in the future. One, the proposed infill criteria should be applied to many more complicated nonlinear problems to test its validity and efficiency. Two, many algorithm details such as the critical distance for judging the correlation of arbitrary two samples should be improved to enhance its flexibility and robustness.
Footnotes
Academic Editor: Mohana Muthuvalu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The first author (Y.M.) acknowledges the funding support from the Rocket Force University of Engineering scientific research project (project number: 2015QNJJ034).