In this article, we study an initial boundary value problem for a coupled system of thermoelasticity. Some existence and uniqueness results are given. The homotopy analysis method is employed to obtain numerical schemes for solving the posed problem. The efficiency of the derived methods is illustrated through several examples with graphical representations.
Linear thermoelastic systems have been studied by many researchers. For example, results dealing with existence and asymptotic behaviors were studied in some literature;1–6 controllability in Bardos et al.7 and Zuazua;8 propagation of singularities in Hrusa and Messaoudi9 and Racke and Wang;10 and regularity, decay, and blow up of solutions in Messaoudi11 and Rivera and Racke.12 In this article, we are interested in studying the numerical solutions of an initial boundary value problem with Dirichlet conditions for a system of linear thermoelasticity with a coupling parameter. We first give some existence and uniqueness results. Then, we proceed to numerical solutions using the homotopy analysis method (HAM). The precise statement of the given initial boundary value problem is as follows: Let and , and consider the following coupling system
System (1) describes a model for the symmetric deformation and temperature distribution in the unit disk. When , the system decouples, and we have the wave and the heat equations. The appearance of Bessel operator in the first and second equations in system (1) comes from the fact that Laplace operator can be written in that form when we focus for radial solutions and in this case, the functions , and must be radial. In this mathematical model, the functions , and g represent the displacement, difference absolute temperature, external force, and the heat supply, respectively, and are positive constants.
System (1) is associated with the initial conditions
and the boundary conditions
We assume that the data satisfy the compatibility conditions: , and . Our main concern as mentioned previously is to study numerical solutions of problems (1)–(3). For this purpose, we apply the HAM to derive numerical solutions of system (1) along with the boundary and initial conditions given in equations (2) and (3).
In fact, we obtain a family of series solutions of the given coupled thermoelasticity system by using the initial conditions (partial t-solution). By this method, we could control the convergence region and the rate of the series solutions.
The HAM was initially proposed by Liao13 in 1992 (see also Liao14–16). Since then, it has been employed to solve many types of ordinary and partial differential equations characterizing many problems in applied sciences and engineering (see Bataineh et al.17 and Hayat et al.18 and the references therein). A modification of the HAM to solve systems of partial differential equations is presented in Bataineh et al.17
The rest of the article is organized as follows: in section “Some existence and unique results,” we give some existence and uniqueness results. In section “Application of the HAM,” we apply the method and give some applications by treating several examples to test the efficiency of the method.
Some existence and uniqueness results
We first introduce some function spaces needed in the sequel. Let be the weighted Hilbert space equipped with the inner product The space denotes the Hilbert space obtained by completing with respect to the norm
and with associated inner product
The set with is the space of continuous mappings from onto a Banach space
Our problems (1)–(3) can be considered as the problem of solving the equation where and , and is the operator given by
where
The operator is considered as an unbounded operator acting on a Banach space B into a Hilbert space H, and with domain denoted by which is the set of functions for which and satisfies the boundary condition The Banach space B is obtained by the closure of in the norm
where
and
The set H is the Hilbert space consisting of vector-valued functions for which the norm
is finite.
The associated inner product in H is defined by
where
We observe that the mappings
are defined and continuous on the Banach space because the elements u are continuous functions on with values in , and have derivatives continuous on with values in , and the elements v are continuous functions on with values in .
Before proceeding to numerical solutions of the given problems , we may state and prove in a short way some existence and uniqueness results. For more details, see literature.19–21 We first establish a priori estimate for the solution from which the uniqueness of the solution follows. Then, based on the density of the range of the operator generated by the problem in consideration, we prove the existence of the solution of problems .
Theorem 1
There exists a positive constant C not depending on such that
holds for all functions .
Proof
We multiply the first equation in system by the operator and the second equation by then taking into account the boundary and initial conditions, we evaluate the integrals
over the domain to obtain
The following elementary inequality is essential in our proof
By adding side to side the inequalities and , using Cauchy- inequality, discarding the positive fourth term on the left-hand side of , applying Gronwall’s lemma in Garding,22 and then passing to the supremum with respect to over in the resulted inequality, we obtain in terms of norms
where Then, inequality follows with Let denote the range or the image of the operator since we have no information about except that hence, we have to make an extension to denoted by so that we have
and It can be shown in a very classical way that the operator has a closure
Definition 1
The solution of the operator equation is called a strong solution of the posed problems .
In view of inequality , we deduce that a strong solution of problems is unique and depends continuously on the elements and , and that the image of is closed in H and coincides with the closure of the image of . That is,
Theorem 2
Problems admit a unique strong solution satisfying
and the norms are bounded above by
Proof
To prove the existence of the solution, it is sufficient to show that ( is surjective). This means that we have to show that the orthogonal complement of the image of reduces to zero, that is, . In fact, this is equivalent to . Moreover, since H is a Hilbert space, the equality holds if and only if from the identity
where runs over B, while and there follows that For the moment, we assume that the following theorem is valid
Theorem 3
If, for some function and for all elements we have
then, vanishes almost everywhere in .
Particularly by putting in (9), we obtain
Then, we conclude by theorem 3 that Consequently, for all we have
Since the three terms in vanish independently, and since the images , and of the operators , and are everywhere dense in the spaces and , respectively, then implies that Hence,
In order to conclude our considerations, we prove theorem 3.
First, define the functions by the relation
Let be the solution of the system
and let
We have
Replacing the functions and , given by , in the relation , we obtain
In the presence of relations and , and the boundary conditions (3), equation (16) becomes
where By using Cauchy- inequality and discarding the third and fourth terms on the left-hand side of the obtained inequality, we obtain
Integrating , we have
From the last inequality , we deduce that almost everywhere in Proceeding in this way step by step along cylinders of height s, we prove that almost everywhere in
Application of the HAM
First, let us introduce the basic idea of HAM.
Consider a system of differential equations
where are known operators and are unknown functions. Then, the zeroth-order deformation equations for system are
where is an embedding parameter, are auxiliary linear operators, are initial approximations of the unknown functions , are unknown functions, and are nonzero auxiliary parameters used to control and adjust the convergence region, and their permissible values can be determined through the h-curves.
Liu and colleagues23–25 showed that the generalized Taylor series is exactly the usual Taylor series expansion but at another point. This means that we can use the Taylor series expansion at another point to obtain the same result as in the HAM. These results clarified the meaning of the auxiliary parameter .
In view of equation , it is clear that when and , one has
Thus, as q deforms from 0 to 1, the functions vary from the initial approximations to the exact solutions .
Using Taylor series, one may have
where
As proved by Liao,14 the convergence of the power series at depends on the choice of the auxiliary parameters, the auxiliary operators, the initial guesses, and the auxiliary functions. If these objects are chosen properly, then for , equation implies
Define the vectors
Then, the mth-order deformation equations are defined as follows (see Bataineh et al.17)
where
and
Now, the components for can be computed recursively by inverting the linear operators in equation along with the conditions from the original problem. For more details, see literature.13–17
To apply the HAM to the systems , we choose appropriate initial approximations satisfying the conditions , and the linear operators
which satisfy
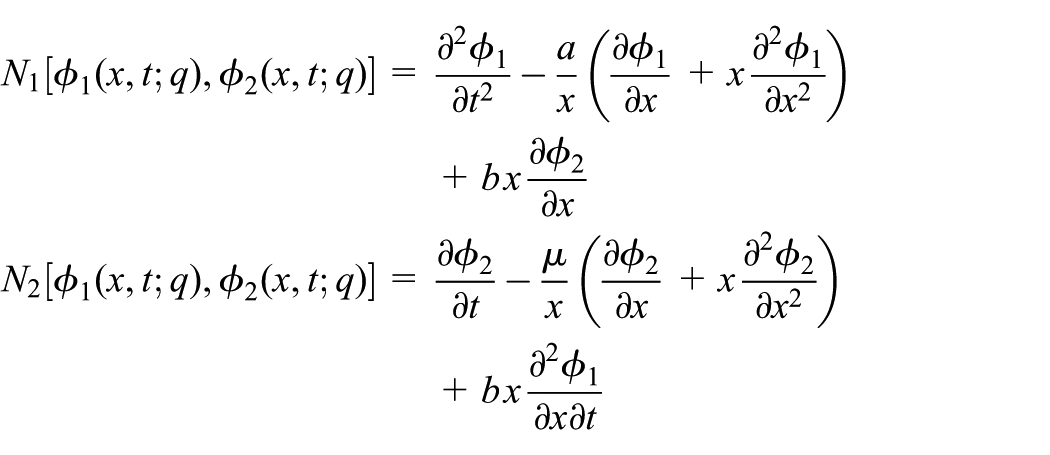
where , , are constants of integration. We also define the two operators and by
Now, the zeroth-order deformation equations can be constructed as
and in view of equation (24), the mth-order deformation equations are
where
and and are auxiliary parameters.
Now, applying the inverse of the operator L, namely, , to both sides of equations (25) and (26), the solutions of the mth-order deformation equations and , for , can be obtained recessively by employing the iterative schemes
where are constants of integration which can be determined using the conditions , which lead to for Hence, the series solutions of the systems (1)–(3) are given by
and
Numerical examples
To test the efficiency of the method, we apply the iterative schemes (27) and (28) to two examples. In the first one, we consider a homogeneous system, and in the second one, we deal with a nonhomogeneous system. In both cases, we consider the same parameter values, namely, , and the auxiliary parameters as .
Example 1: homogeneous system
Consider the systems with , initial conditions and boundary conditions as in (3). We choose the initial guesses as
Then, in view of equations , the first few terms of the series solutions are given by
and
Hence, the truncated series solutions of orders 1 and 2 are as follows
Figure 1 shows the h-curves based on the approximate solutions of order 9. It shows that the acceptable values of the auxiliary parameter h required for the convergence of the series solutions are
The h-curves for and based on ninth-order approximation.
Tables 1–8 show the values of the mth-order truncated series solutions and , computed for different values of the dependent variables x and t when . In fact, direct evaluation shows that the values of these solutions of any order vanish at for all . These tables show that the method converges rapidly just after few terms.
Values of the truncated series solutions of order m at and .
m
x
x
x
1
0.1
−3.05807
1.94203
0.2
−2.11139
1.54145
0.3
−1.55894
1.25079
2
−3.49136
1.44657
−2.37479
1.27292
−1.72697
1.09644
3
−3.42633
1.37811
−2.34062
1.23671
−1.7084
1.07668
4
−3.41881
1.37811
−2.33686
1.23671
−1.7065
1.07668
5
−3.41881
1.37811
−2.33686
1.23671
−1.7065
1.07668
6
−3.41881
1.37811
−2.33686
1.23671
−1.7065
1.07668
Values of the truncated series solutions of order m at .
m
x
x
x
1
0.5
−0.869523
0.77605
0.7
−0.429056
0.38819
0.9
−0.119904
0.0981165
2
−0.931524
0.728864
−0.443534
0.378839
−0.120501
0.0977819
3
−0.926897
0.723946
−0.442921
0.378196
−0.120493
0.0977737
4
−0.926517
0.723946
−0.442888
0.378196
−0.120493
0.0977737
5
−0.926517
0.723946
−0.442888
0.378196
−0.120493
0.0977737
6
−0.926517
0.723946
−0.442888
0.378196
−0.120493
0.0977737
Values of the truncated series solutions of order m at and .
m
x
x
x
1
0.1
−3.94864
−2.20263
0.2
−2.79262
−1.35554
0.3
−2.11473
−0.916364
2
−3.93686
−2.69809
−2.80679
−1.62407
−2.13647
−1.07071
3
−3.87183
−2.76654
−2.77262
−1.66028
−2.1179
−1.09047
4
−3.86431
−2.76654
−2.76886
−1.66028
−2.116
−1.09047
5
−3.86431
−2.76654
−2.76886
−1.66028
−2.116
−1.09047
6
−3.86431
−2.76654
−2.76886
−1.66028
−2.116
−1.09047
Values of the truncated series solutions of order m at .
m
x
x
x
1
0.5
−1.25247
−0.471615
0.7
−0.667458
−0.253825
0.9
−0.205712
−0.0915324
2
−1.26902
−0.518801
−0.673034
−0.263176
−0.206001
−0.091867
3
−1.2644
−0.523719
−0.672421
−0.263818
−0.205993
−0.0918752
4
−1.26402
−0.523719
−0.672388
−0.263818
−0.205993
−0.0918752
5
−1.26402
−0.523719
−0.672388
−0.263818
−0.205993
−0.0918752
6
−1.26402
−0.523719
−0.672388
−0.263818
−0.205993
−0.0918752
Values of the truncated series solutions of order m at and .
m
x
x
x
1
0.1
−7.90676
−20.6233
0.2
−5.82031
−14.231
0.3
−4.58492
−10.5481
2
−5.91686
−21.1188
−4.72679
−14.4996
−3.95647
−10.7025
3
−5.85183
−21.1872
−4.69262
−14.5358
−3.9379
−10.7223
4
−5.84431
−21.1872
−4.68886
−14.5358
−3.936
−10.7223
5
−5.84431
−21.1872
−4.68886
−14.5358
−3.936
−10.7223
6
−5.84431
−21.1872
−4.68886
−14.5358
−3.936
−10.7223
Values of the truncated series solutions of order m at and .
m
x
x
x
1
0.5
−2.95444
−6.01679
0.7
−1.72702
−3.10722
0.9
−0.587082
−0.934417
2
−2.76902
−6.06398
−1.69303
−3.11658
−0.586001
−0.934751
3
−2.7644
−6.0689
−1.69242
−3.11722
−0.585993
−0.934759
4
−2.76402
−6.0689
−1.69239
−3.11722
−0.585993
−0.934759
5
−2.76402
−6.0689
−1.69239
−3.11722
−0.585993
−0.934759
6
−2.76402
−6.0689
−1.69239
−3.11722
−0.585993
−0.934759
Values of the truncated series solutions of order m at and .
m
x
x
x
1
0.1
−12.8544
−43.6492
0.2
−9.60493
−30.3254
0.3
−7.67265
−22.5879
2
−8.39186
−44.1446
−7.12679
−30.594
−6.23147
−22.7422
3
−8.32683
−44.2131
−7.09262
−30.6302
−6.2129
−22.762
4
−8.31931
−44.2131
−7.08886
−30.6302
−6.211
−22.762
5
−8.31931
−44.2131
−7.08886
−30.6302
−6.211
−22.762
6
−8.31931
−44.2131
−7.08886
−30.6302
−6.211
−22.762
Values of the truncated series solutions of order m at and .
m
x
x
x
1
0.5
−5.08191
−12.9483
0.7
−3.05148
−6.67397
0.9
−1.06379
−1.98802
2
−4.64402
−12.9955
−2.96803
−6.68332
−1.061
−1.98836
3
−4.6394
−13.0004
−2.96742
−6.68397
−1.06099
−1.98836
4
−4.63902
−13.0004
−2.96739
−6.68397
−1.06099
−1.98836
5
−4.63902
−13.0004
−2.96739
−6.68397
−1.06099
−1.98836
6
−4.63902
−13.0004
−2.96739
−6.68397
−1.06099
−1.98836
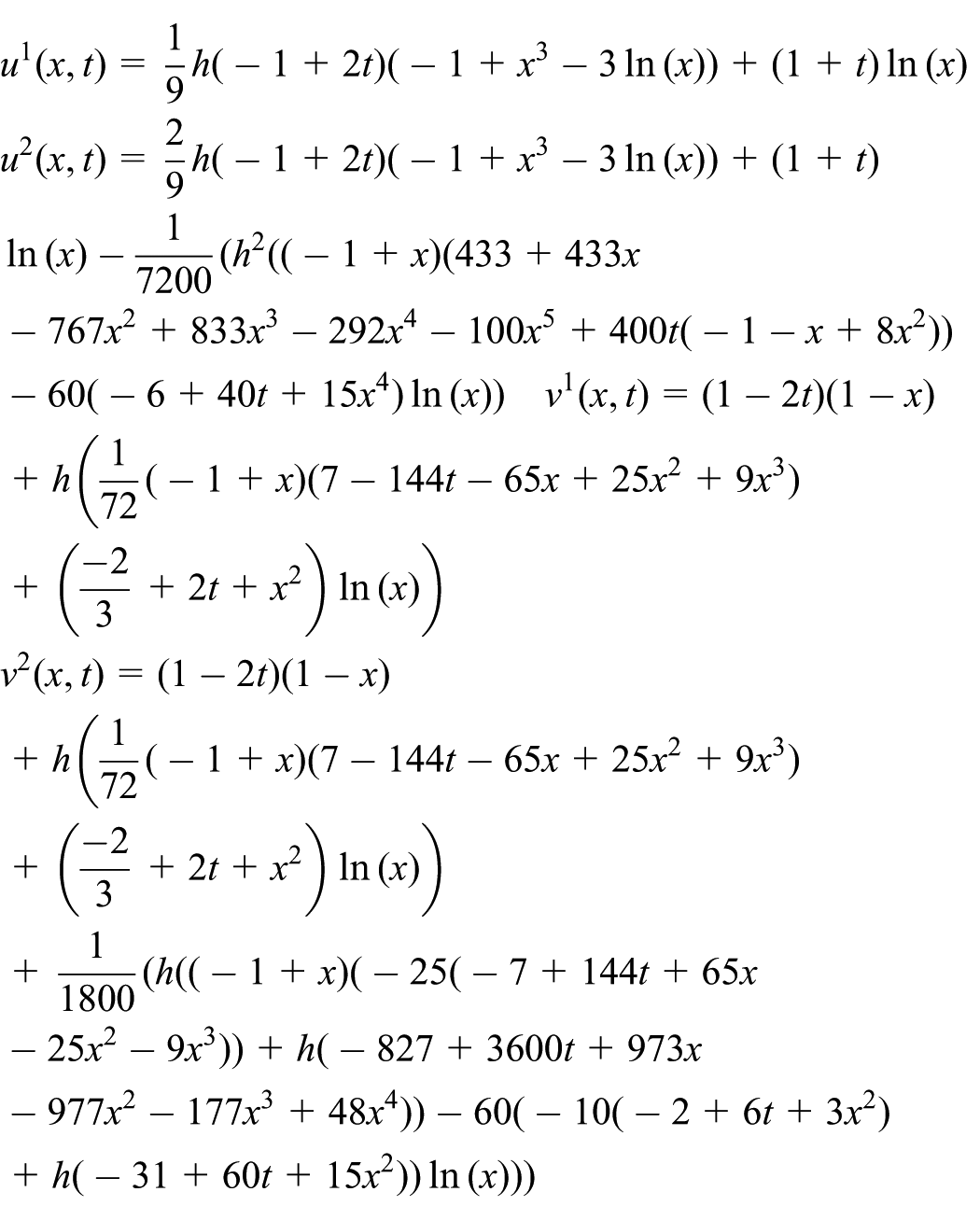
Example 2: nonhomogeneous system
Consider the systems with initial conditions , and boundary conditions as in (3). Let us take the initial guesses as
Then, in view of equations (22) and (23), the first few terms of the series solutions are given by
and
Hence, the truncated series solutions of orders 1 and 2 are as follows
and
Figure 2 shows the h-curve based on the approximate solutions of order 9. It shows that the acceptable values of the auxiliary parameter h required for the convergence of the series solutions are .
The h-curves for and based on ninth-order approximation.
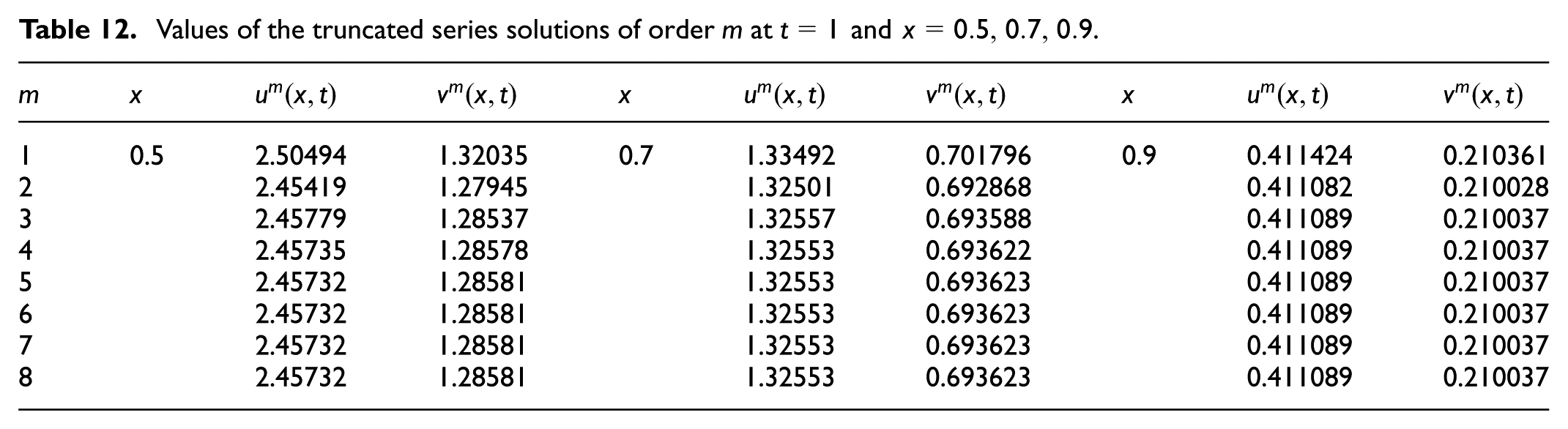
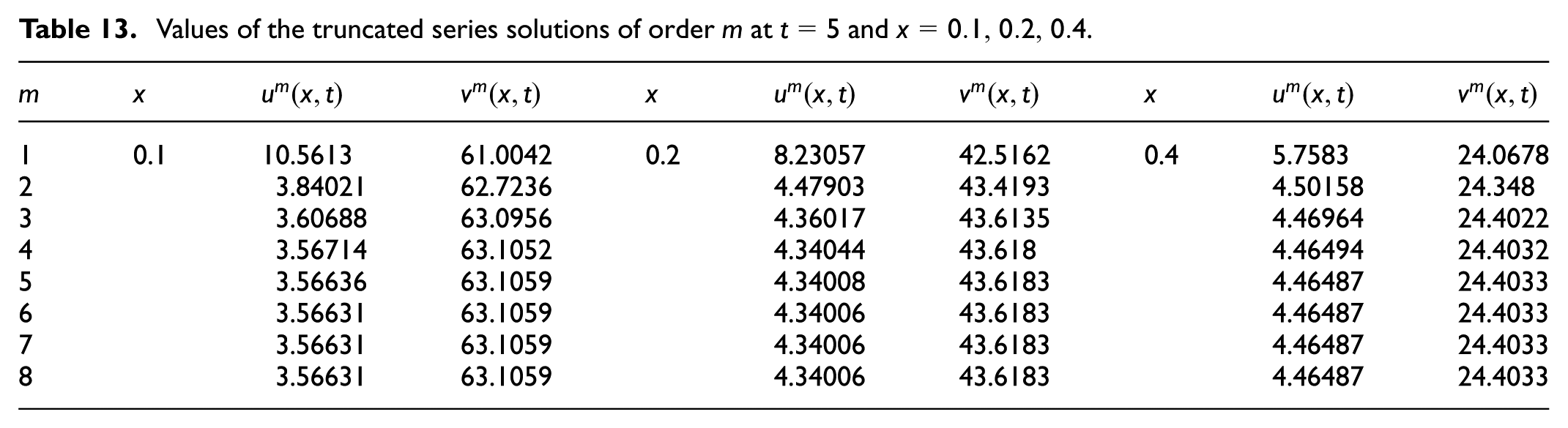
Tables 9–16 show the values of the mth order truncated series solutions and , computed for different values of the dependent variables x and t when . In fact, direct evaluation shows that the values of these solutions of any order vanish at for all . These tables show that the method converges rapidly just after few terms.
Values of the truncated series solutions of order m at and .
m
x
x
x
1
0.1
4.40259
1.03945
0.2
3.11024
0.939409
0.4
1.8124
0.711899
2
4.19609
0.331094
2.99631
0.526697
1.77365
0.562527
3
4.28141
0.367606
3.04491
0.543447
1.78919
0.566162
4
4.27853
0.377201
3.04358
0.547972
1.78893
0.567161
5
4.27775
0.377881
3.04322
0.548293
1.78886
0.567227
6
4.27769
0.377881
3.0432
0.548293
1.78885
0.567227
7
4.27769
0.377881
3.0432
0.548293
1.78885
0.567227
8
4.27769
0.377881
3.0432
0.548293
1.78885
0.567227
Values of the truncated series solutions of order m at .
m
x
x
x
1
0.5
1.38976
0.588694
0.7
0.738334
0.339785
0.9
0.226734
0.105746
2
1.36843
0.505318
0.733908
0.322441
0.226568
0.105112
3
1.3762
0.50682
0.73501
0.322583
0.226583
0.105113
4
1.3761
0.507227
0.735004
0.322617
0.226583
0.105113
5
1.37607
0.507252
0.735002
0.322618
0.226583
0.105113
6
1.37607
0.507252
0.735002
0.322618
0.226583
0.105113
7
1.37607
0.507252
0.735002
0.322618
0.226583
0.105113
8
1.37607
0.507252
0.735002
0.322618
0.226583
0.105113
Values of the truncated series solutions of order m at and .
m
x
x
x
1
0.1
7.89728
3.76409
0.2
5.58524
2.78198
0.4
3.2623
1.70311
2
7.38437
3.50164
5.30164
2.61095
3.16802
1.63264
3
7.41117
3.59977
5.31948
2.66029
3.17484
1.64557
4
7.40152
3.60936
5.31477
2.66482
3.17376
1.64657
5
7.40074
3.61004
5.31441
2.66514
3.17369
1.64663
6
7.40068
3.61004
5.31439
2.66514
3.17369
1.64663
7
7.40068
3.61004
5.31439
2.66514
3.17369
1.64663
8
7.40068
3.61004
5.31439
2.66514
3.17369
1.64663
Values of the truncated series solutions of order m at .
m
x
x
x
1
0.5
2.50494
1.32035
0.7
1.33492
0.701796
0.9
0.411424
0.210361
2
2.45419
1.27945
1.32501
0.692868
0.411082
0.210028
3
2.45779
1.28537
1.32557
0.693588
0.411089
0.210037
4
2.45735
1.28578
1.32553
0.693622
0.411089
0.210037
5
2.45732
1.28581
1.32553
0.693623
0.411089
0.210037
6
2.45732
1.28581
1.32553
0.693623
0.411089
0.210037
7
2.45732
1.28581
1.32553
0.693623
0.411089
0.210037
8
2.45732
1.28581
1.32553
0.693623
0.411089
0.210037
Values of the truncated series solutions of order m at and .
m
x
x
x
1
0.1
10.5613
61.0042
0.2
8.23057
42.5162
0.4
5.7583
24.0678
2
3.84021
62.7236
4.47903
43.4193
4.50158
24.348
3
3.60688
63.0956
4.36017
43.6135
4.46964
24.4022
4
3.56714
63.1052
4.34044
43.618
4.46494
24.4032
5
3.56636
63.1059
4.34008
43.6183
4.46487
24.4033
6
3.56631
63.1059
4.34006
43.6183
4.46487
24.4033
7
3.56631
63.1059
4.34006
43.6183
4.46487
24.4033
8
3.56631
63.1059
4.34006
43.6183
4.46487
24.4033
Values of the truncated series solutions of order m at .
m
x
x
x
1
0.5
4.83827
18.1579
0.7
3.08692
9.30156
0.9
1.13409
2.74038
2
4.16193
18.3057
2.95574
9.33004
1.12961
2.74139
3
4.14702
18.3313
2.95384
9.33333
1.12958
2.74143
4
4.14506
18.3317
2.95367
9.33336
1.12958
2.74143
5
4.14504
18.3317
2.95367
9.33336
1.12958
2.74143
6
4.14503
18.3317
2.95367
9.33336
1.12958
2.74143
7
4.14503
18.3317
2.95367
9.33336
1.12958
2.74143
8
4.14503
18.3317
2.95367
9.33336
1.12958
2.74143
Values of the truncated series solutions of order m at and .
m
x
x
x
1
0.1
−15.6525
236.171
0.2
−7.64433
164.609
0.4
−0.186059
93.2568
2
−41.2607
240.367
−21.9616
166.854
−4.99802
93.9753
3
−41.8191
241.082
−22.2513
167.23
−5.07841
94.0811
4
−41.8965
241.091
−22.2898
167.234
−5.08763
94.0821
5
−41.8973
241.092
−22.2902
167.234
−5.0877
94.0822
6
−41.8973
241.092
−22.2902
167.234
−5.0877
94.0822
7
−41.8973
241.092
−22.2902
167.234
−5.0877
94.0822
8
−41.8973
241.092
−22.2902
167.234
−5.0877
94.0822
Values of the truncated series solutions of order m at .
m
x
x
x
1
0.5
1.73273
70.3964
0.7
3.21179
36.1016
0.9
1.81202
10.6441
2
−0.861708
70.7801
2.70647
36.1769
1.79465
10.6468
3
−0.899747
70.8303
2.7015
36.1834
1.79459
10.6469
4
−0.903611
70.8307
2.70116
36.1834
1.79459
10.6469
5
−0.903637
70.8308
2.70116
36.1834
1.79459
10.6469
6
−0.903638
70.8308
2.70116
36.1834
1.79459
10.6469
7
−0.903638
70.8308
2.70116
36.1834
1.79459
10.6469
8
−0.903638
70.8308
2.70116
36.1834
1.79459
10.6469
Conclusion
Some well-posed results of a linear singular thermoelastic system are obtained. Moreover, the system is solved numerically by HAM. The derived schemes are tested numerically using two examples, one of them is homogeneous and the second one is nonhomogeneous. These examples show that the truncated series solutions converge rapidly just after few terms, showing the efficiency and effectiveness of the HAM method.
Footnotes
Academic Editor: Michal Kuciej
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors would like to extend their sincere appreciation to the Deanship of Scientific Research at King Saud University for its funding of this research through the Research Group Project no. RGP-117.
References
1.
AssilaM.Nonlinear boundary stabilization of an inhomogeneous and anisotropic thermoelasticity system. Appl Math Lett2000; 13: 71–76.
2.
MarinM.On existence and uniqueness in thermoelasticity of micropolar bodies. C R Acad Sci Paris Serie II1995; 321: 475–480.
3.
MarinM.Some basic theorems in elastostatics of micropolar materials with voids. J Comput Appl Math1996; 70: 115–126.
4.
MarinMMarinescuC.Thermoelasticity of initially stressed bodies, asymptotic equipartition of energies. Int J Eng Sci1998; 36: 73–86.
5.
RiveraJEMBarretoRK. Existence and exponential decay in nonlinear thermoelasticity. Nonlinear Anal1998; 31: 149–162.
6.
SlemrodM.Global existence, uniqueness, and asymptotic stability of classical solutions in one-dimensional thermoelasticity. Arch Ration Mech An1981; 76: 97–133.
7.
BardosCLebeauGRauchJ. Contrôle et stabilisation dans les problèmes hyperboliques, Appendix II in JL LIONS [L2], pp.492–537.
8.
ZuazuaE.Controllability of the linear system of thermoelasticity. J Math Pure Appl1995; 74: 291–315.
9.
HrusaWJMessaoudiSA.On formation of singularities on one-dimensional nonlinear thermoelasticity. Arch Ration Mech An1990; 3: 135–151.
10.
RackeRWangYG.Propagation of ingularities in one-dimensional thermoelasticity. J Math Anal Appl1998; 223: 216–247.
11.
MessaoudiSA.On weak solutions of semilinear thermoelastic equations. Maghreb Math Rev1992; 1: 31–40.
12.
RiveraJEMRackeR. Smoothing properties, decay, and global existence of solutions to nonlinear coupled systems of thermoelasticity type. SIAM J Math Anal1995; 26: 1547–1563.
13.
LiaoSJ.The proposed homotopy analysis techniques for the solution of nonlinear problems. PhD Dissertation, Shanghai Jiao Tong University, Shanghai, 1992 (in English).
14.
LiaoSJ.Beyond perturbation: introduction to the homotopy analysis method. Boca Raton, FL: Chapman and Hall/CRC Press, 2004.
15.
LiaoSJ.On the homotopy analysis method for nonlinear problems. Appl Math Comput2004; 147: 499–513.
16.
LiaoSJ.Notes on the homotopy analysis method: some definitions and theorems. Commun Nonlinear Sci2009; 14: 983–997.
17.
BatainehANooraniMHashimI.Approximate analytical solutions of systems of PDEs by homotopy analysis method. Comput Math Appl2008; 55: 2913–2923.
18.
HayatTNawazMObaidatS.Axisymmetric magnetohydrodynamic flow of micropolar fluid between unsteady stretching surfaces. Appl Math Mech2011; 32: 361–374.
19.
LomovtsevFE.Necessary and sufficient conditions for the unique solvability of the Cauchy problem for second order hyperbolic equations with a variable domain of operator equations. Differentsialnye Uravneniya1992; 28: 712–722.
20.
MesloubSMesloubF.On the higher dimension Boussinesq equation with a nonclassical condition. Math Method Appl Sci2011; 34: 578–586.
21.
MesloubSAboelrishMR.On an evolution mixed thermo-elastic system problem. Int J Comput Math2015; 92: 424–439.
22.
GardingL. Cauchy’s problem for hyperbolic equations (lecture notes: 1957). Chicago, IL: University of Chicago.
23.
LiuCS.The essence of the homotopy analysis method. Appl Math Comput2010; 216: 1299–1303.
24.
LiuCSLiuY.Comparison of the general series method and the homotopy analysis method. Mod Phys Lett B2010; 24: 1699–1706.
25.
LiuCS.The essence of the generalized Taylor theorem as the foundation of the homotopy analysis method. Commun Nonlinear Sci2011; 16: 1254–1262.