
Abstract
Lane change operation is widely used in numerous traffic scenarios; to minimize lane change time and avoid collisions with other vehicles required by intelligent vehicles, an optimal lane change motion is proposed for the shortest time free lane change and emergency obstacle avoidance lane change. First, two optimal lane change motion models are constructed based on a 3-degree-of-freedom dynamical vehicle model. Because of uncertain parameters in the vehicle model, the optimal lane change motion problem is an uncertain optimal control problem. Subsequently, targeted at nonlinearity and uncertain parameters, an extended adaptive pseudo-spectral method is also presented on the basis of approximate and numerical integration of parameter space. Finally, solving the optimal lane change motion problem, optimization results, control results based on the nonlinear model predictive control algorithm, and experimental results are shown under circumstances of certain vehicle mass and uncertain vehicle mass. As for uncertain parameters, optimization results are featured with robustness. Thus, uncertain parameters need not be measured, and optimization calculation need not be carried out in real time. The algorithm put forward here could be adopted to solve an uncertain optimal control problem. The optimal lane change motion can be extended to apply in more complex operations like merging, double-lane change, entering/exiting highways, or overtaking another vehicle.
Keywords
Introduction
Optimal control is a subject derived from engineering problems in fields of aerospace, chemical engineering, electric engineering, and so on. It aims at controlling signals to guarantee that the system satisfies constraint conditions and minimum/maximum performance indexes simultaneously. Time, fuel, consumption, or any other parameter that may be interested in during application can serve as performance indexes. By referring to definition of optimal control, intelligent vehicle optimal motion means that while the vehicle motion is realized, minimum/maximum performance indexes that have been set can also be satisfied together with constraint of the vehicle itself as well as safety campaign motion and environmental constraints. According to the direction of the vehicle motion, optimization motions of intelligent vehicles are divided into two kinds of optimal motion. One is the longitudinal optimal motion, and the other is the lateral optimal motion. In this article, we mainly focus on the optimal lane change motion (OLCM) which is a kind of optimal lateral motion of intelligent vehicles.
The main task of vehicle lateral motion control is to maintain the routes/lanes and keep vehicles running on roads/lanes. Lateral dynamic system of vehicles is a complicated system with nonlinearity and uncertainty. Lateral motion control is highly vulnerable to impacts of vehicle parameters, road surface roll, tire characteristics, road surface roughness, and so on. In addition, the lateral motion is also subjected to substantial external disturbances from lateral wind powers and others. Consequently, perturbation can occur to system parameters. Vehicle mass and tire–road friction coefficient are the basic parameters of lateral dynamic model. The vehicle mass varies with the number of passengers carried by the vehicle and their weight. The tire–road friction coefficient is determined by the characteristics of tire and road surface. These parameters are defined to be uncertain parameters. It is very difficult to measure these parameters in real time. Therefore, considering this, the study on lateral motion control algorithm should focus on solutions to these problems. In Li et al. 1 and Kasahara et al., 2 the related contents are studied directly at complicated nonlinearity and uncertainty mentioned above to design a lateral motion controller with robustness.
With regard to vehicles running on structural roads, lane change is one of the most common operations. Lane change maneuver is one of the most thoroughly investigated automatic driving operations that can be used by an intelligent vehicle as a primitive for performing more complex operations like merging, entering/exiting highways, or overtaking another vehicle. Trajectory generation and control of tracking trajectory are the two main contents of lane change motion. The traditional algorithms of trajectory generation include graph search or geometry-based approaches. Among the existing references, free lane change trajectories of vehicles have been studied, such as constant speed offset lane change trajectory, circular arc lane change trajectory, trapezoidal acceleration lane change trajectory, cosine function lane change trajectory, B spline curve lane change trajectory, and polynomial lane change trajectory.3,4 In Chen et al., 5 study of the automated lane changing on curved road was performed with unequal nonzero curvatures of the outer and inner lanes. This article contributes to a trajectory planning method suitable for curved road based on trapezoidal acceleration profile. According to Yoshida et al., 6 the vehicle lane change trajectory was predesigned, and the lane change controller was designed based on model predictive control (MPC) algorithm. Regarding the study by Mashadi and Majidi, 7 the independent optimal lance change path was also designed for vehicles based on the pseudo-spectral method. A two-phase optimal control problem was used for the path-planning program to generate the optimal path of vehicle for performing the lane change maneuver. In Li et al., 3 Guo et al., 4 and Chen et al., 5 lane change trajectories are described using given mathematical expressions, which have specific geometric features and are designed in advance. In previous studies,3–7 lane change trajectories are not considered the influence of uncertain parameters of the vehicle model.
In this article, an optimal lane change problem is proposed, which is an optimal control problem, and is solved using the extended adaptive pseudo-spectral method. During independent running of intelligent vehicles, minimization of lane change time can contribute to vehicles traveling on the lane and reducing express/opposite lane occupation time for overtaking. Besides, emergency obstacle avoidance lane change is able to prevent collisions with vehicles at a slow speed. For this purpose, an OLCM problem is put forward by virtue of performance indexes including the shortest time and the optimal safe distance. On account of the vehicle lateral dynamic model, the shortest time or the optimal safe distance is used as a performance index to construct optimal control problem for free lane change and emergency obstacle avoidance lane change motions. In terms of a vehicle model, there exist some uncertain parameters, for example, vehicle mass and tire–road friction coefficient. These uncertain parameters make the OLCM problem to be an uncertain optimal control problem. The solution algorithm in presence cannot be adopted to solve the OLCM problem directly. For problems caused by such parameters, an extended adaptive pseudo-spectral method is proposed in this article to solve uncertain optimal problems related to OLCM.
In this article, we mainly consider the influence of the vehicle mass uncertainty. In order to verify algorithm presented here, optimization results of certain and uncertain vehicle mass as well as optimal motion control results based on the nonlinear model predictive control (NMPC) algorithm are all exhibited.
The rest of this article is organized as follows: section “OLCM” gives two kinds of OLCM. Section “Extended adaptive pseudo-spectral method” gives an extended adaptive pseudo-spectral method targeted at nonlinearity of the lane change model. Section “Vehicle model” discusses the 3-degree-of-freedom (DOF) model of the vehicle and uncertain parameters. Section “OLCM control problem models” gives the main contribution of this article, describing in detail about control models of optimal free lane change motion and optimal emergency obstacle avoidance lane change motion. Simulation results of OLCM and control results based on NMPC controller are presented in sections “Simulation results” and “Simulation of OLCM control,” respectively. Section “Experiments” gives experimental results of optimal lane change on real road. Finally, section “Conclusion” contains concluding remarks and future perspectives.
OLCM
Lane change refers to a motion that a vehicle running on the present lane steers to another lane to travel. It is also known as lane change maneuvering. The curve AB shown in Figures 1 and 2 is the lane change trajectory along which an intelligent vehicle can accomplish lane change motion. In addition, the lane trajectory should guarantee that the relevant vehicle is able to complete lane change and simultaneously limit maximum longitudinal and lateral acceleration to ensure ride comfort of passengers on the vehicle. Comparing with the existing literature, OLCM problem is employed to fulfill lane change by satisfying objective functions. Here, there are two OLCMs. One is the shortest optimal time free lane change motion, and the other is optimal emergency obstacle avoidance lane change motion.

Free lane change motion.

Emergency obstacle avoidance lane change motion.
Optimal free lane change motion
As shown in Figure 1, an intelligent vehicle and a low vehicle run on an identical lane. In conformity with driving requirements of the intelligent vehicle, it should steer to an adjacent lane to keep running (single-lane change) or overtake other vehicles (double-lane change). Lane change time minimization is beneficial for vehicles to run on the lane and is also able to reduce express/opposite lane occupation time for overtaking. Figure 1 shows that longitudinal operating range
Optimal emergency obstacle avoidance lane change motion
As given in Figure 2, an intelligent vehicle and a low vehicle run on an identical lane as well. To avoid collisions with vehicles at low speeds, emergency lane change is adopted in most cases. Longitudinal operating range minimization for intelligent vehicles accompanied with lane change is referred to as the optimal emergency obstacle avoidance lane change motion.
Extended adaptive pseudo-spectral method
Uncertain optimal control problem
Certain optimal control problem
The above optimal free and emergency obstacle avoidance lane change motion problems can be concluded into an optimal control problem. The primary objective of this problem is to optimize performance indexes subjected to dynamic equation constraints, the boundary conditions, and the path constraint by acquiring states and control. 8 Generally, an optimal control problem can be expressed by the following formula

Such that dynamic equation constraints are as follows

Path constraint denoted by an inequation is shown below

Boundary condition constraints are given below

When

Parameters in equations (1)–(4) are all certain, and it is referred to as certain Bolza-type optimal control problem. There are many algorithms that can be employed to solve this problem, such as the pseudo-spectral method.
Uncertain optimal control problem
In the case that equations (1)–(4) have some uncertain parameters, the uncertain Bolza-type optimal control problem obtained can be expressed as follows

Such that the dynamic equation constraints are as follows

Path constraint denoted by an inequation is shown below

Boundary condition constraints are given below

In equations (6)–(9), objective functions are integrals of Bolza-type objective functions with parameter p on

p is a range value that stands for system characteristics or a time invariant stochastic parameter of the known probability density function. In this article, an extended adaptive pseudo-spectral method is presented to solve uncertain optimal control problems.
When

In this article, an optimization algorithm used to solve equations (6)–(9) and (11) is proposed.
Extended adaptive pseudo-spectral method
Adaptive pseudo-spectral method
At present, numerical method for solving optimal control problem is divided into two categories. One is the direct method, and the other is the indirect method. To be specific, there are a variety of direct methods that take advantage of diverse techniques. Among them, two common techniques are parameterization of control and parameterization of state and control. In recent years, pseudo-spectral method and orthogonal collocation method are attracting increasingly more attentions as approaches of state and control parameterization. Furthermore, the direct collocation method employs h, p, or hp approaches. As far as the hp approach, both the number of mesh intervals and the order of an approximation polynomial in every mesh subintervals are varying. According to latest studies, comparing with h or p approach, not only a smaller number of finite-dimensional polynomials are required to be approximate, but they are also able to satisfy the associated convergence. An hp adaptive algorithm is described in Darby et al.9,10 The existing mesh refinement for optimal control problem suffers from two major limitations. That is, the number of meshes cannot drop, and it fails to check discontinuity of solutions. In this way, an unnecessarily great mesh can be generated. In addition, the number of mesh subintervals beyond the actual needs may be placed where solutions are discontinuous or change rapidly.9–11 Liu et al. 12 adopt the adaptive hp mesh refinement method to overcome the above problems. Different from traditional methods, it does not check smooth solutions and permits to reduce the size of meshes. In this article, the adaptive pseudo-spectral method described in Liu et al. 12 is used to solve the certain optimal control problem.
Approximate uncertain optimal control problem
In equations (6)–(9), there exists an uncertain parameter p. Besides, general characteristics of equation (7) indicate that uncertainties caused by all aspects of the dynamic equation are automatically contained in the system. Because of p, the adaptive pseudo-spectral method mentioned in section “Adaptive pseudo-spectral method” cannot be used to solve uncertain optimal control problems related to equations (6)–(9). Below, method for approximate uncertain optimal control problems is given. 13
It is assumed that

Thus, the original objective function J can be deemed as a function imbedded into another function

This step is further utilized and the original objective function J is seen as a function imbedded into another function

In this equation, the last augmented function p indicates that
Therefore, a formula shown below can be acquired

where
Considering that p is uncertain and cannot act as a decision variable,

Using this functional, we construct a new functional of a functional by integrating


where
Based on equation (1), the optimal control problem
where constraints satisfy
Thus, the objective of
Specific to problems of equation (16), any cubature scheme used to solve Lebesgue–Stieltjes integral is taken into consideration. Assume

If quadrature formula of Lebesgue–Stieltjes integral is used, the following equation can be acquired

where

According to the basic concepts above, an finite-dimensional optimization problem can be constructed, and the corresponding objective function is
Then, for finite n value, semidiscretization problem


The above formula is denoted as problem
Extended adaptive pseudo-spectral method
In summary, on the basis of sections “Adaptive pseudo-spectral method” and “Approximate uncertain optimal control problem,” an extended adaptive pseudo-spectral method is proposed, and the corresponding calculation procedures are as follows:
Step 1. The approximate optimal control problem of equations (6)–(9) is
Step 2. Based on UT transformation,
Step 3.
Step 3.1. Collocation points are set for initial meshes and every subinterval.
Step 3.2. Solve nonlinear programming problem of every mesh.
Step 3.3. If the maximum relative error of all mesh regions is smaller than the permissible mesh refinement precision, stop the refinement process.
Step 3.4. Generate the second mesh.
Step 3.4.1. Compute the maximum relative error.
Step 3.4.2. If the maximum relative error of a mesh region is larger than the permissible mesh refinement precision, increase collocation points for this region.
Step 3.4.3. If the maximum relative error of a mesh region is no more than the permissible mesh refinement precision, the order of polynomial approximation should be reduced to the greatest extent or mesh regions are merged together.
Step 3.5. In each mesh region, please repeat the following procedures up until the permissible mesh refinement precision can be met or the designated maximum iterations of mesh refinement are reached.
Step 3.5.1. Solve the current meshes and estimate maximum relative errors of every mesh region.
Step 3.5.2. Increase or decrease the size of meshes.
Step 3.5.3. Construct new meshes that should be later imbedded into the above meshes. After new meshes are obtained, please go back to Step 3.4.1 to continue the corresponding executions.
Vehicle model
Mathematical model
Vehicle dynamic model is a simplified single traction bicycle model as presented in Figure 3. It is equipped with 3 DOFs including longitudinal motion, lateral motion, and yaw motion. The absolute orientation of the vehicle in the inertial frame is

Dynamical model of bicycle.
The external forces acting on the vehicle consist of a side force,

where M is the vehicle mass and

where
State and control vectors can be defined as
Uncertain parameters
Modeling process of the vehicle model shows that the vehicle mass denoted in equations (19) and (20) is M, vertical moment of inertia is
OLCM control problem models
Certain optimal free lane change motion control model
The experimental vehicle is equipped with four seats, which can take up to four passengers. When the experimental vehicle is carrying 1, 2, 3, or 4 passengers, respectively, the vehicle mass is certain. At this time, the OLCM problem for each case is the certain optimal control problem.
Objective function of optimal free lane change motion
As analyzed above, lane change time is the objective function, that is

Optimal free lane change motion model
By referring to Figure 1, a vehicle steers to point B from A. Then, A is the initial point, while B is the terminal point. The entire lane change process is limited by vehicle states at points A and B. Therefore, the optimal free lane change control is an optimal control problem that not only utilizes the shortest time as an optimizing index but is also under constraints of states at initial and terminal points. It can be expressed by the following equation

Such that dynamic equation constraints are given below

Constraints for initial and terminal point states are as follows

where the initial time is 0 and the terminal time is
Control input constraints are as follows

where
Uncertain optimal free lane change motion model
In fact, it is true that the number of passengers is uncertain and random. When the number and weight of passengers are uncertain, the vehicle mass is also uncertain, and the optimal free lane change motion problem (equations (21)–(24)) is an uncertain optimal control problem. The uncertain parameter p in the uncertain optimal control problem (equations (6)–(11)) is the vehicle mass M.
The objective function of the uncertain optimal free lane change motion model is integration of equation (21) in parameter space

According to equation (18), we select two nodes and two relevant weight coefficients, the uncertain optimal free lane change model is obtained based on the method in section “Approximate uncertain optimal control problem,” and it can be expressed by the following equation

Such that new dynamic equation constraints are given below

New constraints for initial and terminal point states are as follows

Control input constraints are as those given in equation (24).
Certain optimal emergency obstacle avoidance lane change motion model
Objective function of optimal emergency obstacle avoidance lane change motion
As shown in Figure 2, the optimal emergency obstacle avoidance lane change motion is an optimal control problem that a vehicle has the shortest longitudinal operating range and can complete the lateral operating range

Optimal emergency obstacle avoidance lane change motion model
By referring to Figure 2, a vehicle steers to point B from A, and points A and B are initial and terminal points, respectively. The entire lane change process is limited by vehicle states at points A and B. Therefore, the optimal emergency obstacle avoidance lane change control is an optimal control problem that not only utilizes the shortest longitudinal operating range as an optimizing index but is also under constraints of states at initial and terminal points. It can be expressed by the following equation

Such that the corresponding dynamic equation constraints are the same as those shown in equation (22).
Constraints for initial and terminal point states are as follows

where the initial time is 0 and the terminal time is
Control input constraints are as those given in equation (24).
Uncertain optimal emergency obstacle avoidance lane change motion control model
Similarly, the objective function of the uncertain optimal emergency obstacle avoidance lane change motion model is integration of equation (26) in parameter space

According to equation (18), we select two nodes and two relevant weight coefficients, and the uncertain optimal emergency obstacle avoidance lane change motion model is obtained based on the method in section “Approximate uncertain optimal control problem,” and it can be expressed by the following equation

Such that new dynamic equation constraints are as those given in equation (25).
New constraints for initial and terminal point states are as follows

Control input constraints are as those given in equation (24).
Simulation results
The weight of each adult passenger is agreed to be 65–85 kg. According to the method presented in sections “Adaptive pseudo-spectral method” and “Extended adaptive pseudo-spectral method,” numerical optimization results are given for OLCMs in both cases which are the certain number of passengers (certain vehicle mass) and the uncertain number of passengers (uncertain vehicle mass).
Vehicle model parameter
Here, uncertain parameters only cover vehicle mass denoted by M. As the moment of inertia of vehicles is associated with M, it changes with variations in M. When the number of passengers is from 0 to 4, the vehicle mass M is from 800 to 1060 kg, and
Parameter values of vehicle model.

Results of optimal free lane change motion
Optimization result for certain vehicle mass
According to the lane width of the structured road, the lateral running distance
Results of certain optimal free lane change motion.
From the results in Figure 4(b), we can know that the certain free optimal lane change shortest time of each case is 2.22, 2.40, 2.46, and 2.52 s, respectively. Simulation results in Figure 4 show that the optimization results of the certain OLCM are different with the vehicle mass. The optimization results of each case are different, for example, the optimization results of one passenger are different from those of the two passengers. The results of one passenger are not the same as the results of the two passengers. In other words, because the vehicle mass varies with the number of passengers and their weight, we must carry out optimization to obtain the optimal results again. However, the number of passengers and their weight are uncertain and random, and it is also very difficult to measure the vehicle mass in real time. So, we must find other ways to solve this problem.
Optimization results of uncertain vehicle mass
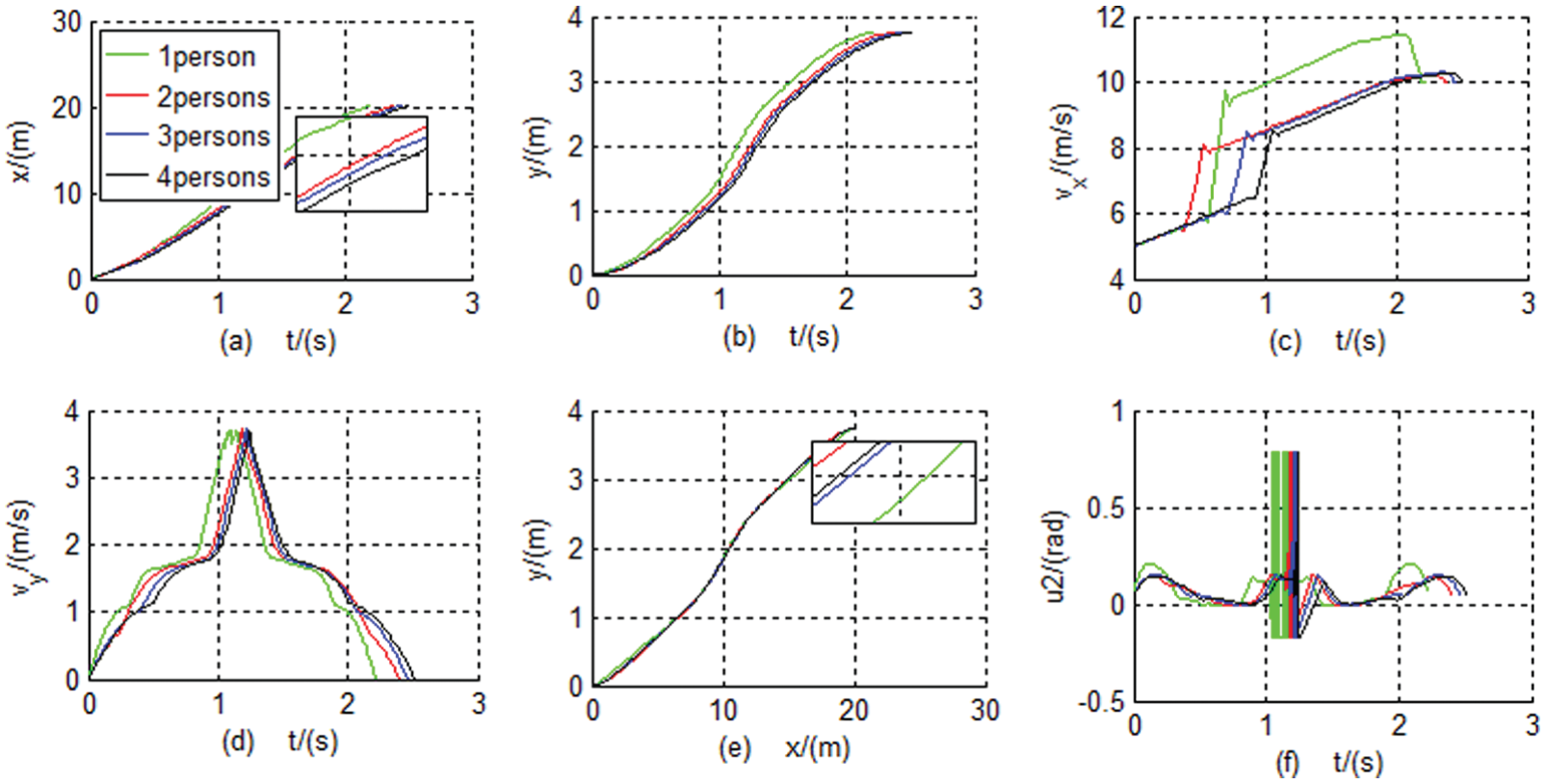
The number of passengers carried by the vehicle is varied, and the optimization results given in Figure 4 are suitable only for a fixed number of passengers but not for the variable number of passengers. In order to satisfy the uncertain optimal free lane change motion with the variable number of passengers, it is required to give the result of the OLCM for the uncertain vehicle mass. According to the number of passengers and weight of each passenger, we can calculate the range of vehicle mass. When the number of passengers is from 1 to 2, the range of vehicle mass is 865–930 kg; when the number of passengers is from 1 to 3, the range of vehicle mass is 865–995 kg; when the number of passengers is from 1 to 4, the range of vehicle mass is 865–1060 kg. According to the range of vehicle mass, optimization results can be obtained. So, as long as the vehicle mass is in this range, without measuring the actual number of passengers and weight, we may directly use the above optimization results.
As shown in Figure 5, uncertainty optimization results of 1–2, 1–3, and 1–4 passengers are given, respectively. For each case, the optimization results of different numbers of passengers are given to meet the need of the change in the number of passengers. The lateral travel distance is set as 3.75 m, and the shortest time of lane change motion is 2.68, 2.65, and 2.37 s. Figure 5(f) is the front wheel angle under three cases, respectively.
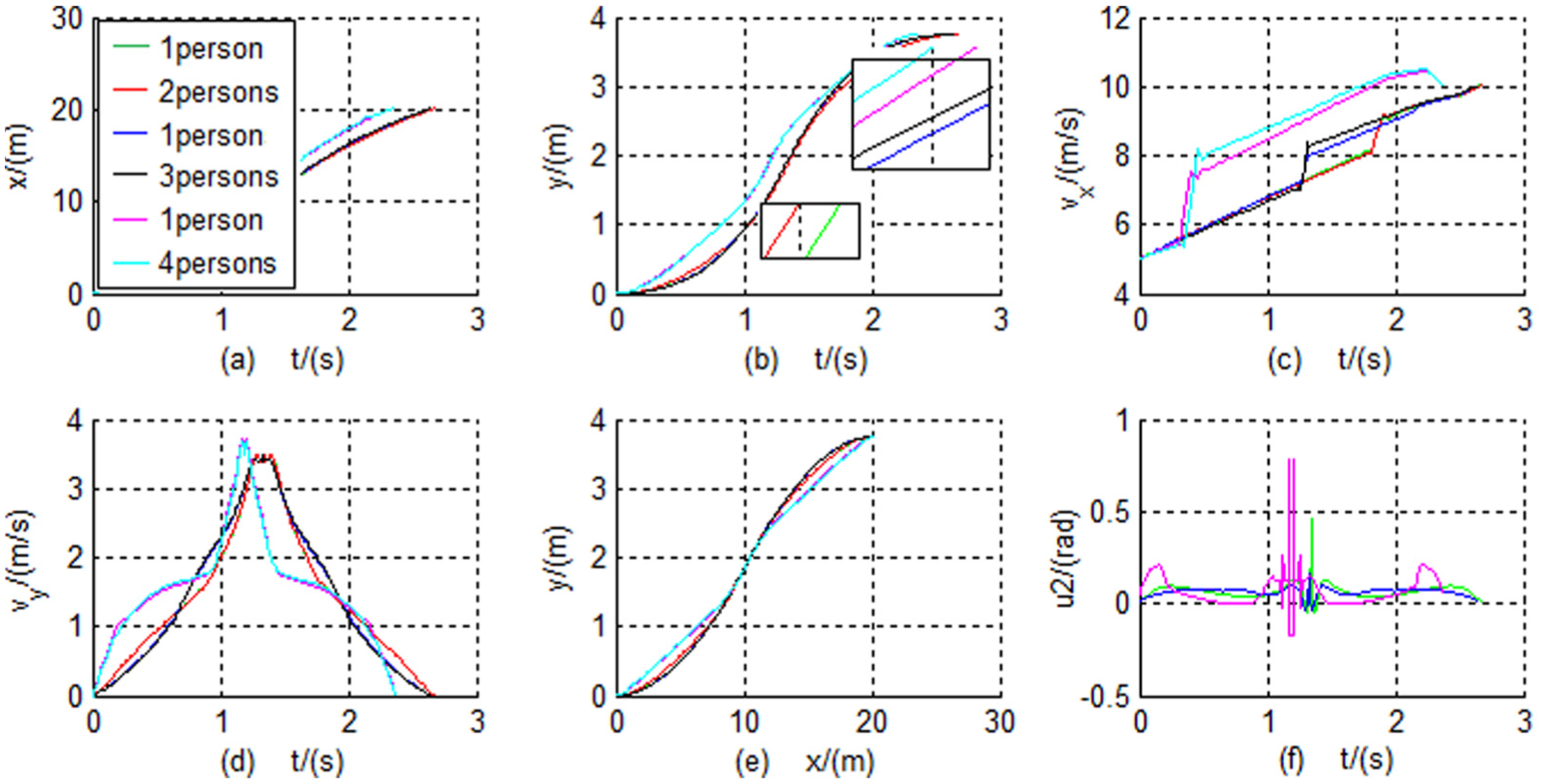
Results of uncertain optimal free lane change motion.
Results of optimal emergency obstacle avoidance lane change motion
Optimization result for certain vehicle mass
Similarly, for the certain optimal emergency obstacle avoidance lane change motion, optimization results for certain vehicle mass are shown in Figure 6. According to the structured lane width, the lateral travel distance

Results of certain optimal emergency obstacle avoidance lane change motion.
Optimization result for uncertain vehicle mass
Similarly, as shown in Figure 7, uncertain optimization results of 1–2, 1–3, and 1–4 passengers are given, respectively. For each case, the optimization results of different numbers of passengers are given to meet the need of the change in the number of passengers. The lateral travel distance

Results of uncertain optimal emergency obstacle avoidance lane change motion.
Simulation of OLCM control
Optimization results in sections “Results of optimal free lane change motion” and “Results of optimal emergency obstacle avoidance lane change motion” can serve as desirable inputs of the OLCM controller. MPC algorithm is the only control technology that considers future state prediction and constraints simultaneously, especially suitable for autonomous driving in a dynamically changing environment. 16 In addition, this algorithm satisfies strict security constraints (e.g. obstacle avoidance) and constraints of actuator. Vehicle model expressed in equation (19) or (22) is nonlinear. Here, an OLCM controller is designed based on NMPC. 17
Euler’s method is adopted to perform discretization of equation (22), and the relevant sampling period is denoted as

where k refers to sampling instant and
In this way, NMPC controller of the OLCM can be written as follows
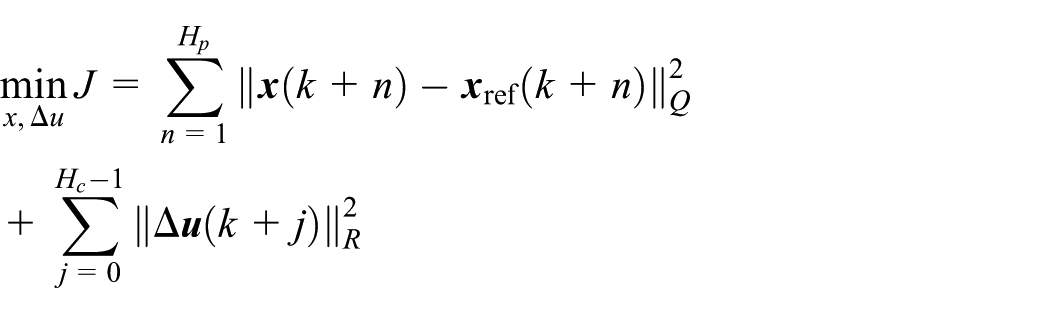
s.t.

where
For OLCM control simulation results based on NMPC algorithm, refer to Figure 8.

NMPC-based optimal lane change motion control results.
Simulation results are shown in Figure 8(a)–(d), which are control results using optimal results in Figures 4–7 as desired inputs, respectively. As longitudinal and lateral positions preferably track the desirable inputs, it is indicated that the OLCM is completed. Therefore, the optimization results in sections “Results of optimal free lane change motion” and “Results of optimal emergency obstacle avoidance lane change motion” are used as the reference inputs, and the NMPC controller is used to achieve the OLCM for intelligent vehicles.
Experiments
Test vehicle and sensors
The test vehicle is equipped with a differential global positioning system/inertial navigation system (DGPS/INS), a four-layer laser radar, a camera, an electron spin resonance (ESR) millimeter wave radar, an SX-4300, a throttle unit, a braking unit, an electron processing system (EPS), and so on. We collect lane change data from the test vehicle with these vehicle sensors. The location of the vehicle sensors and DGPS receiver is shown in Figure 9. We detect the steering angle of the vehicle’s front wheel based on SX-4300 installed on the input axis of EPS. The ESR millimeter wave radar is used to detect the front vehicles or obstacles on road. The DGPS/INS is used to collect the velocity and position information of the test vehicle. The velocity and position information is transferred to a laptop personal computer which is the center of control system by CAN bus.

Test vehicle and sensors: (a) test vehicle, (b) SX-4300, (c) DGPS, and (d) ESR.
Experimental results
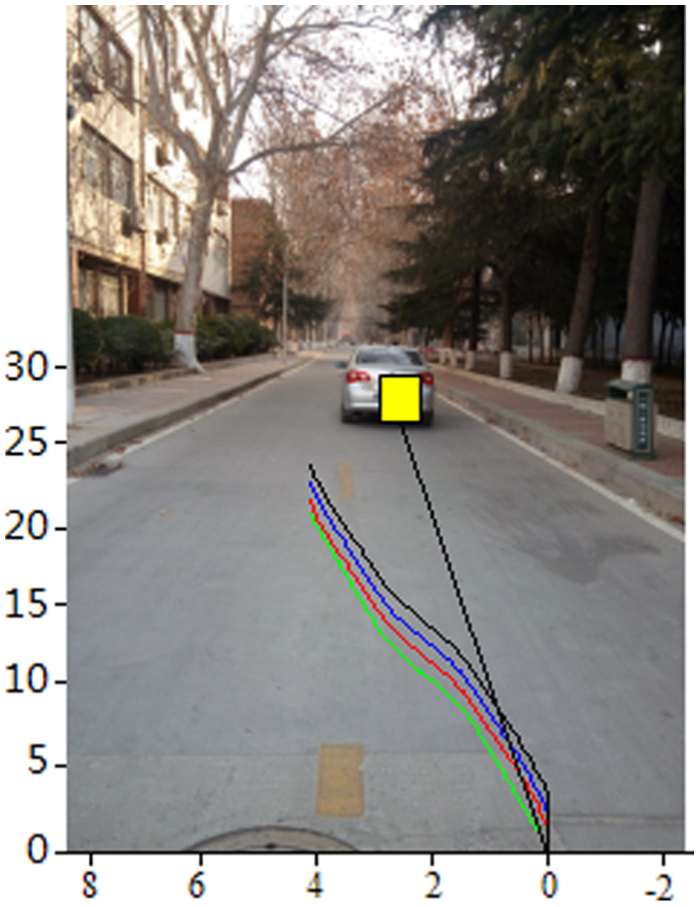
Results of certain optimal free lane change motion are shown in Figure 10. Results of certain optimal emergency obstacle avoidance lane change are shown in Figure 11. We use the ESR detect obstacles in the lane or other vehicles, and they are marked out in the original traffic scenario image by the yellow box. We can give the distance between obstacles and host vehicle, relative angle, and velocity information of the detected object with the ESR. When the initial vehicle speed is 5 m/s, the certain optimal free lane change trajectory results are shown in Figure 10 and are overlapped on the original traffic scenario. In Figure 10, a vehicle is detected by the electronic stability program (ESP). Because it is far from the host vehicle, we do not consider it as an obstacle. The host vehicle can complete the optimal free lane change motion. When the initial vehicle speed is 5 m/s, the certain optimal emergency obstacle avoidance lane change trajectory results are shown in Figure 11 and are overlapped on the original traffic scenario. In Figure 11, a vehicle is detected by the ESR, which is in the lane same as the host vehicle, so we think it is an obstacle. Using the maximum negative acceleration to compute maximum braking distance is the basis for the collision or not. When the distance between the host vehicle and the obstacle is greater than the maximum braking distance, the collision can be avoided by braking. When the distance between the host vehicle and the obstacle is less than the maximum braking distance, the collision cannot be avoided by braking, but the collision avoidance must be avoided through the emergency obstacle avoidance lane change motion. In Figure 11, the host vehicle can complete the lane change motion by tracking the Trajectories 1 or 2 without collision. But if the host vehicle run along the Trajectory 3 or 4, then there is a collision between the host vehicle and the obstacle, so it is not used for the lane change motion. In this case, we can obtain the safe lane change trajectory using slow down the initial host vehicle speed and reoptimization.
Certain optimal free lane change.

Certain optimal emergency obstacle avoidance lane change.
Conclusion
With regard to vehicles running on a structural road, lane change is one of the most commonly used operations. In this article, an OLCM problem is presented by regarding the shortest time or the optimal safe distance as performance indexes. Furthermore, an OLCM model is established based on a vehicle dynamic model. Considering that uncertain parameters give rise to optimization solution problem as far as the OLCM model of vehicles is concerned, an extended adaptive pseudo-spectral method is proposed to solve uncertain optimization problems. Optimization results under circumstances of certain vehicle mass and uncertain vehicle mass are separately presented on the basis of this method. Studies on the optimization of other uncertain parameters, such as tire–road friction coefficient and cornering stiffness, may be subsequently carried out. Optimization results here are used as the reference trajectory of OLCM control. Additionally, a lane change motion controller is designed based on NMPC algorithm to further conduct experimental studies.
For autonomous driving of intelligent vehicles, minimization of lane change time is not only beneficial for vehicles to run on the lane but helpful to reduce express/opposite lane occupation time taken by overtaking. Moreover, emergency obstacle avoidance lane change can prevent collisions with slow vehicles. The OLCM in this article, which is single-lane change motion, can be extended to the double-lane change movement (overtaking, merging, or entering/exiting), and its front steering angle input is different from conventional front steering angle for the lane change motion (double-lane change) which uses the sine wave input. Given initial state and set terminal state of OLCM, lane change motion optimization results can satisfy the uncertain parameters when they are changed, these show that optimization results are robust. In this way, it is not necessary to measure the uncertain parameters and optimize the calculation in real time. In the end, the problem of lane change is transformed into an optimal control problem to thoroughly study controls over intelligent vehicle motion.
Footnotes
Academic Editor: Murat Uzam
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the project Funding Project for Academic Human Resources Development in Institutions of Higher Learning Under the Jurisdiction of Beijing Municipality (PHR(IHLB)).