
Abstract
The article proposes a robust control approach based on self-organizing Hermite-polynomial-based neural network disturbance observer for a class of non-affine nonlinear systems with input saturation, state constraint, and unknown compound disturbance. Using Taylor series expansion, a hyperbolic tangent function, the non-affine nonlinear system with input saturation is transformed into time-varying affine system without input saturation, which can reduce step n + 1 of the backstepping technique compared with conventional method. Next, a self-organizing Hermite-polynomial-based neural network disturbance observer is proposed to estimate the compound disturbance online. Then, the auxiliary systems are designed to solve state constraint for subsystems, and hyperbolic tangent function is used to approximate the saturated control input. Simulation results proved the effectiveness of the proposed control scheme.
Keywords
Introduction
Since several decades ago, besides traditional proportional–integral/proportional–integral–derivative (PI/PID) control, many control approaches of nonlinear system have been proposed, including feedback linearization method,1–3 backstepping control,4–7 and the method based on neural network.8 –11 In Bidram et al., 1 an input–output feedback linearization control method is proposed for multi-agent systems with nonlinear and heterogeneous dynamics via which nonlinear dynamics of agents is transformed to linear dynamics. An adaptive backstepping scheme is designed to control lateral/directional dynamics of unmanned aerial vehicles in Swarnkar and Kothari. 5 The researches above aim at affine nonlinear system rather than non-affine system. For the reason that the control input of non-affine system plays a role in the nonlinear implicit way, the control schemes of affine system can’t be applied to non-affine system, and they should be developed for the non-affine system.
Efficient control schemes have been studied widely owing to the fact that most practical engineering projects are non-affine systems. The adaptive fuzzy control scheme is proposed on the basis of the affine-like equivalent mode.12,13 In Wu et al., 14 an adaptive fuzzy tracking controller with the corresponding parameter updating laws is designed to estimate the influence of the compound disturbance with unknown upper bound. The control schemes based on neural network are proposed in previous studies.15–20 In He et al. 15 and Karimi and Menhaj, 16 radial basis function (RBF) neural network is applied to controlling the non-affine systems. In Meng et al., 17 the non-affine system is transformed into affine system by the combination of a low-pass filter and state transformation. And a neural network observer is designed to estimate the unavailable state. Also, input saturation is a common phenomenon in the practical project. The hyperbolic tangent function and Nussbaum function are employed to handle the saturation in Chen et al. 21 and Askari et al. 22 In Chen and Yu 23 and Li et al., 24 the auxiliary systems are constructed to compensate the influence of input saturation on tracking error. In Rehan et al., 25 the anti-windup compensator (AWC) is designed for Lipschitz nonlinear systems with input saturation, and its necessary condition is the stabilizing controller. In Shojaei, 26 a saturated tracking controller is designed to reduce the risk of actuator saturation using generalized saturation functions. Furthermore, the control scheme should be further developed for the non-affine system with input saturation.
To estimate the unknown compound disturbance, the article proposes a self-organizing Hermite-polynomial-based neural network disturbance observer (SHNNDO). The number of hidden neurons, the weight matrix, the center vector, and width vector will change as the adaptive laws, which guarantees the estimate accuracy. Compared with SHNNDO, the accuracy of radial basis function disturbance observer (RBFDO) will be influenced by the weight matrix and the set-value of the center vector and width vector of the basis function and fuzzy disturbance observer (FDO) will be influenced by the choice of adaptive laws. As a result, it has the advantages of less calculation and higher accuracy compared with RBFDO 27 and FDO.28,29 Sliding mode disturbance observer (SMDO)30–32 is of simple design and reliable control performance, but the chattering will affect the control performance of sliding mode in the practical projects. Hence, we get the conclusion that the SHNNDO has the obvious advantages compared with the disturbance observer discussed above.
In this article, the non-affine nonlinear system with input saturation and state constraint is transformed into affine nonlinear system by Taylor series expansion and hyperbolic tangent function, which simplifies the calculation of auxiliary systems and backstepping scheme compared with Chen et al. 21 Furthermore, SHNNDO is proposed to estimate the unknown compound disturbance, which is of minor calculation and better approximation performance. Then, the fast-convergence nonlinear differentiator is designed to handle the derivatives of virtual control laws. Finally, backstepping controllers are designed and the stability of the close-loop system is proved by Lyapunov method.
The rest of the article is organized as follows. The problem statement is described in section “Problem statement and preparation” and section “Self-organizing Hermite-polynomial-based neural network disturbance observer design” designs SHNNDO. The control scheme based on SHNNDO for non-affine nonlinear system with input saturation and unknown disturbance is presented in section “Based on SHNNDO robust controller design.” The simulation results are given to show effectiveness of the proposed control scheme in section “Simulation analysis” and conclusion is described in section “Conclusion.”
Problem statement and preparation
Consider a class of multi-input and multi-output (MIMO) non-affine nonlinear system with input saturation and state constraint as follows

where
The saturation function

where
To proceed the design of the robust tracking control of the non-affine nonlinear systems, these assumptions are required.
Assumption 1
Output signal
Assumption 2
Assumption 3
The unknown compound disturbance
To get the time-varying affine nonlinear system with input saturation, Taylor series expansion is applied to
Then, to solve the control input constraint, we define hyperbolic tangent function to approximate the saturated function

And the saturation function can be redefined as

where

The saturation function and hyperbolic tangent function is given as Figure 1.
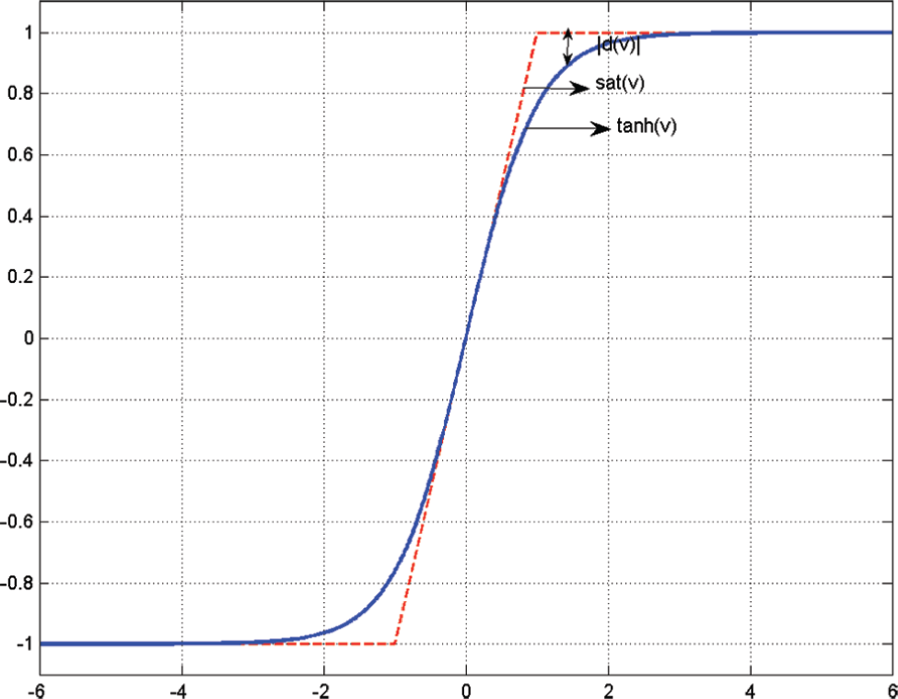
Saturation function and hyperbolic tangent function.
Similarly, according to Taylor series expansion, we obtain

where

Let

Therefore, the non-affine nonlinear system with input saturation and unknown compound disturbance can be restated as follows

where

where
From equation (9), we see that nonlinear terms are considered as unknown disturbance and it is really true that there is ambiguity. In this case, we design robust sliding mode filter as equation (10). While
Assumption 4
The control gain matrix
Remark 1
It can be seen that the non-affine nonlinear system with input saturation is transformed into affine nonlinear system without input saturation via the combination of Taylor series and hyperbolic tangent function. Based on it, the computation of backstepping is reduced and we only need to design
Figure 2 depicts the control scheme based on SHNNDO for non-affine nonlinear system with input saturation and state constraint in this article. To ensure that the output

The diagram of non-affine nonlinear system with input saturation.
SHNNDO design
From section “Problem statement and preparation,” it can be noted that the redefined disturbance
Description of self-organizing Hermite-polynomial-based neural network
There are five layers in self-organizing Hermite-polynomial-based neural network (SHNN) as shown in Figure 3, and the operation function of each layer is described as follows: 33
Layer 1 (input layer). In this layer, the node only transmits input signals to next layer and no function is operated.
Layer 2 (Hermite layer). In this layer, the operation functions are given as

where the orthogonal polynomials are as follows

Layer 3 (reception layer). In this layer, the operation function is as presented

Generally, the higher-order orthogonal Hermite polynomial basis functions are selected, and the better approximated performance will be obtained.
Layer 4 (hidden layer). In this layer, the node output signals are as follows

where
Layer 5(output layer). The operation function of this layer is the output of the SHNN, that is

where

Network structure of SHNN.
Learning algorithm of hidden neuron
In this section, the learning algorithm of hidden layer neuron includes (1) generating a new hidden neuron and (2) canceling the existing inappropriate neurons. The flowchart of learning algorithm is given in Figure 4.

Flowchart of learning algorithm.
To determine whether to generate a new hidden neuron, the distance between the input

If
The parameters of added neuron are as follows

where
The hidden layer is updated as following

where
To determine whether to cancel a existing neuron, the jth hidden neuron index is defined as follows

where
If
The parameters are updated as follows

where
Design of SHNNDO
The Taylor expansion linearization technique is applied to

where
Defining

where
Theorem 1
Considering the non-affine nonlinear system (equation (1)), Assumption 2, and the approximate method (equations (3)–(8)), the SHNNDO is designed as follows

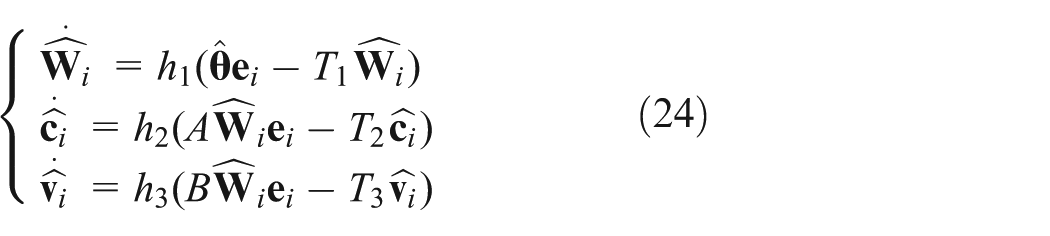
where
Proof
Substituting equations (9), (21), and (22) into equation (23), we have

where the approximate error becomes
Considering the Lyapunov function candidate

Differentiating V and invoking equations (24) and (25), we have

where
Integrating equation (27), we obtain

where
From equation (25),
Remark 2
Compared with RBF neural network disturbance observer, SHNNDO can adjust the number of hidden neurons according to learning algorithm. Meanwhile,
Based on SHNNDO robust controller design
In this section, a controller based on SHNNDO is designed through backstepping scheme, and the stability is proved. To tackle the input saturation, we use hyperbolic tangent function to approximate the saturation function and then use Taylor series expansion. The auxiliary systems are designed to compensate the influence of state constraints. Finally, the output
Design of fast-convergence nonlinear differentiator
The fast-convergence nonlinear differentiator is designed to estimate the derivatives of virtual control laws, which can avoid the growing of differential orders effectively.
Lemma 1
Consider system 34

where

satisfies
Similarly, to handle the growing of differential orders of virtual control laws, we design the fast-convergence nonlinear differentiator as follows

where
In equation (31), if

Convergent velocity in rapid-convergent form.
According to Lemma 1, to prove the stability of the fast-convergence nonlinear differentiator (31), the Lemma 2 should be proved.
Lemma 2
Consider the system (32)

There exists that
Proof
Chose the Lyapunov function as follows

Differentiating equation (33), we obtain

This means that the system equilibrium of
Consequently, the conclusions of equation (31) are obtained

that is

In this article, fast-convergence nonlinear differentiator is applied to estimating the derivatives of the virtual control laws. From the proof above, we obtain that fast-convergence nonlinear differentiator is of good tracking performance and the growing of differential orders of virtual laws is solved.
Backstepping scheme
Aiming at system (equation (9)), we propose the backstepping scheme based on the SHNNDO.
From section “Problem statement and preparation,” we conclude that the input saturation is tackled by hyperbolic tangent function, so we only design the auxiliary systems to handle the state constraint. The auxiliary systems are proposed as follows

where
Step 1. Define the compensated error as

where the compound disturbance

where
Consider the following Lyapunov function candidate for the tracking error

Using equations (38) and (39), we have
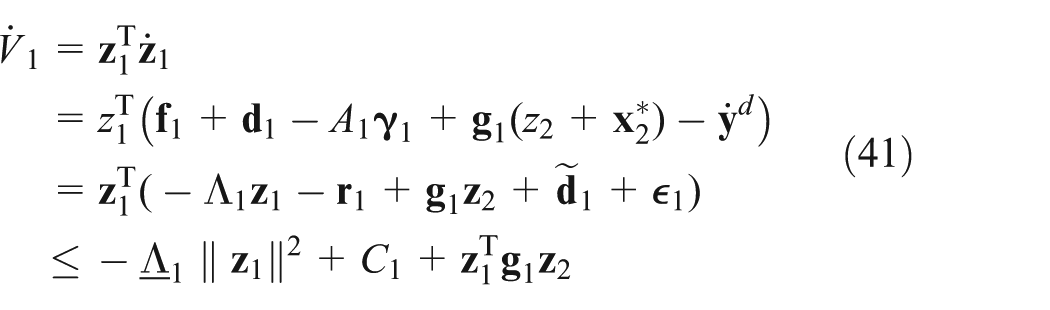
Because

Step i (2 ≤ i < n−1). Let

To cancel the coupling terms of the previous step, the virtual control law is described as following

where
Let the Lyapunov function be

Similar to step 1,

Step n. In order to handle the control input saturation, the hyperbolic tangent function is used to approximate it, then Taylor series expansion is applied to it.
Let

Define the control input term as follows

To prove that tracking errors of the subsystems converge to zero, the Lyapunov function is chosen as
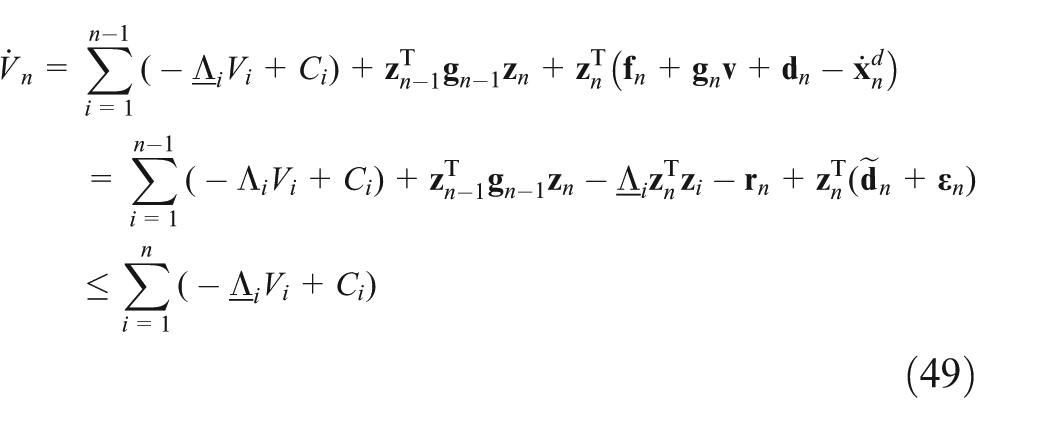
where

Considering the design of SHNNDO and controllers, we get the conclusion as follows.
Theorem 2
Consider the non-affine nonlinear system (1), approximation methods (9), SHNNDO (23), and the parameter adaptive law (24), virtual law (39) and (44), control input (48), under Assumptions 1–4. All variables
Proof
According to equation (50), we have

where

Then, the stability of the system is proved.
Remark 3
The robust terms with exponential convergence properties designed above is of great convergence.
Simulation analysis
In this section, the proposed control scheme is tested via simulation of near-space vehicle (NSV) with unknown compound disturbance. Consider the system

where



where M is the mass of NSV, V is airspeed, g is the acceleration of gravity,
In equation (53), the first subsystem is slow loop system and the second is fast loop system. In simulation, the output

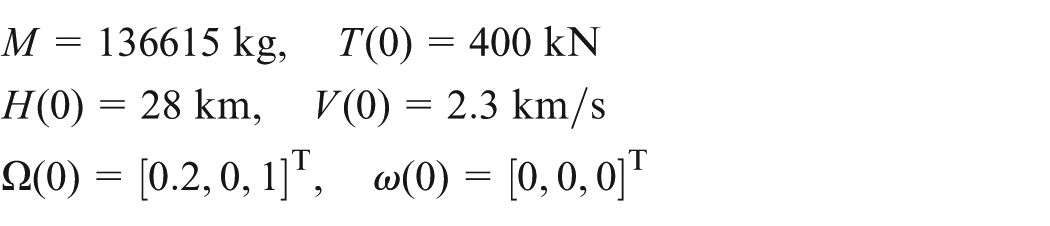
The parameters are selected as
The initial values are set as follows
Suppose that there are 30% uncertainties on aerodynamic coefficients, the disturbance moments chosen as follows are exerted on fast loop when

The tracking desired guidance commands are given as follows
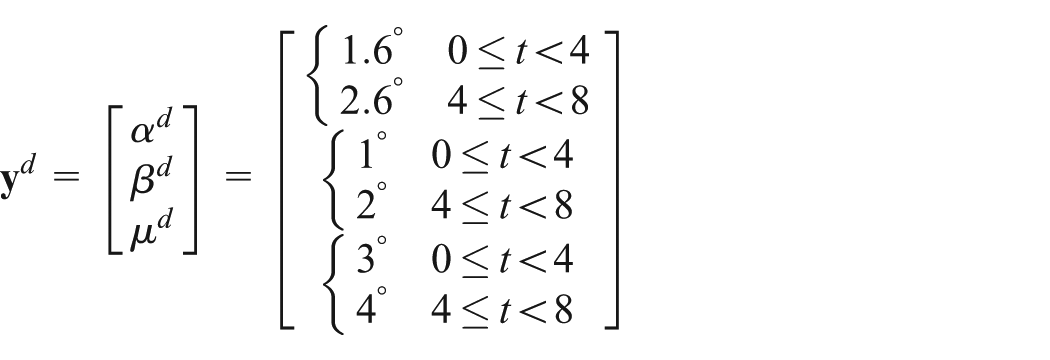
And the filter
Figure 6 demonstrates the tracking performance of the proposed controller based on SHNNDO. The red dashed line shows the actual attitude angle, and the black solid line corresponds to the desired guidance commands. Furthermore, Figures 6 and 7 show that the tracking errors of attitude angles which tend to zero in the flight.

Simulation results of attitude angle.
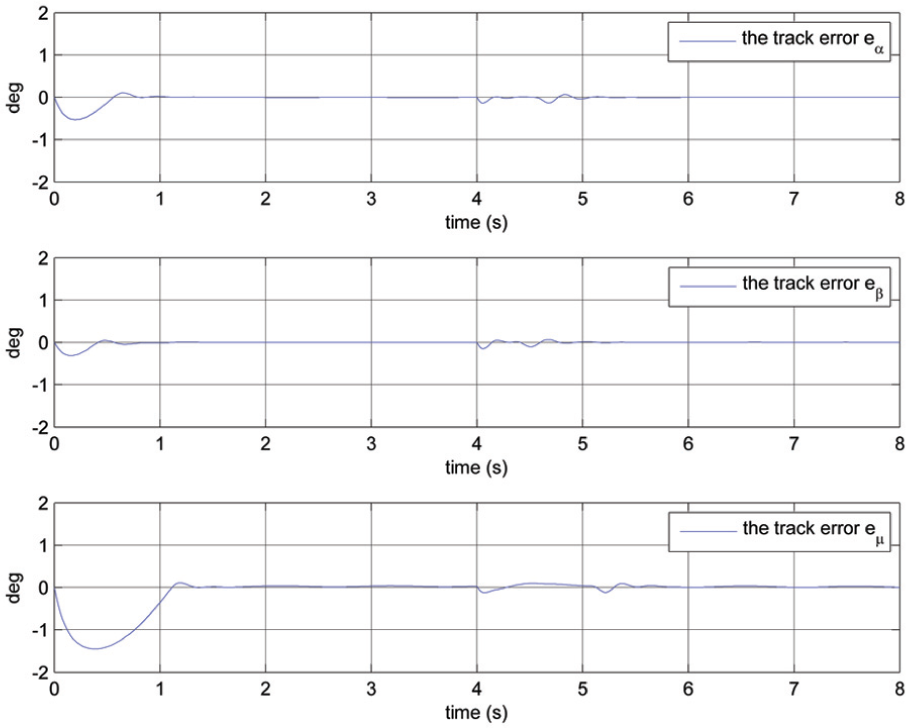
Simulation results of tracking error of attitude angle.
In Figure 8, the behavior of the actual rate velocity

Simulation results of angle rate.
Figure 9 shows that the behavior of deflection angles is constrained and tend to zero to guarantee the stability of flight. From above analysis, we obtain that the system has good robustness and the control scheme proposed in this article is effective.
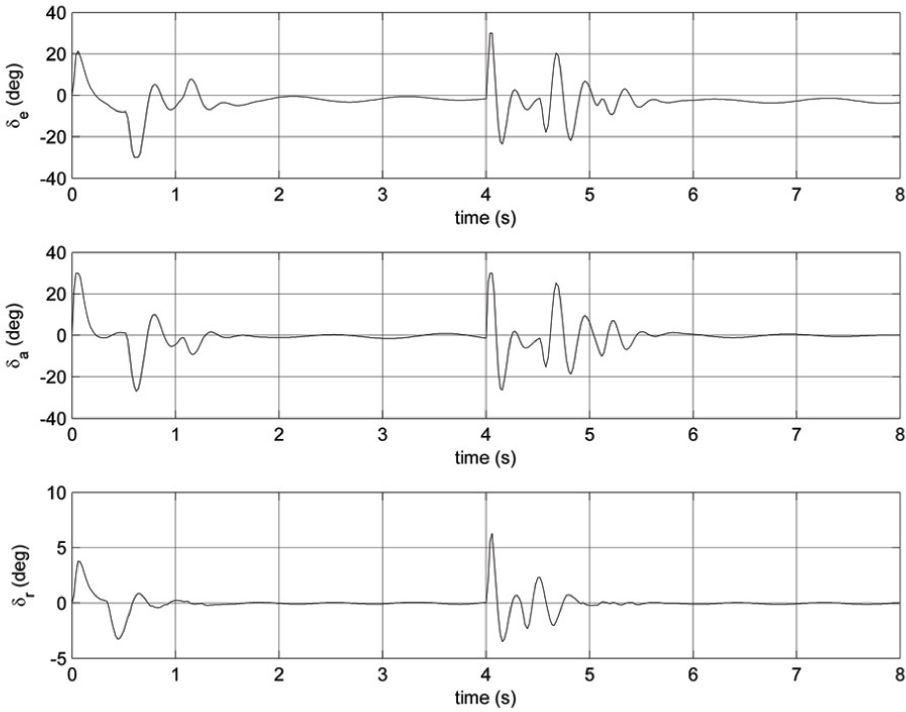
Simulation results of aerodynamic rudder deflection angle.
Figure 10 demonstrates the behavior of saturated angle velocity, as we can see, even though there exists state constraint, the influence can be eliminated to guarantee the robustness of system.

Simulation results of saturated angle velocity.
According to the analysis above, we obtain that the system is of satisfactory tracking performance based on the proposed control scheme.
Conclusion
This article applies the backstepping scheme based on SHNNDO to non-affine nonlinear system with state constraint and input saturation to improve the robustness to unknown compound disturbance. We use approximation methods to get the affine nonlinear system. Furthermore, in the backstepping controller, we design a fast-convergence nonlinear differentiator to estimate the derivative of virtual control laws, however, the SHNNDO is proposed to approximate the external disturbance, model errors, and parameter uncertainties. And the stability is proved by Lyapunov function. Finally, the system is simulated on Simulink. Simulation results illustrate the effectiveness of the proposed control scheme.
Footnotes
Acknowledgements
The authors sincerely thank the editor and all the anonymous reviewers for their valuable comments and suggestions.
Academic Editor: Chenguang Yang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (61403161 and 61503156), the Doctoral Foundation of University of Jinan (XBS1459), and the Research Fund for the Taishan Scholar Project of Shandong Province of China.