
Abstract
In order to resolve the goal confusion or missing on curve road, a target recognition method on automobile cruise system is put forward based on filtering and fuzzy control theory. A vehicle model with 3 degrees of freedom on the yaw rate, sideslip angle, and body roll angle is discretized and an extended Kalman filter is proposed for estimating the road curvature. For the key target on the straight road, a multi-object changing-lane fuzzy controller is presented to prejudge the dangerous changing-lane objects. For the recognition of key target on the curve road, a recognition model is set up to calculate the lateral offset between the estimated road curvature radius and the target trajectory radius. In order to validate the feasibility of the key target recognition method, the simulation cases are given for multi-objects on the curve road and straight road adopting Carsim and MATLAB/Simulink co-simulation. The simulation results show that designed fuzzy controller has good robustness for prejudging the dangerous changing-lane objects on straight road. The extended Kalman filter has realized the efficient estimation on road curvature and the recognition model has identified the key target accurately to prevent the goal confusion or missing on curve road. The research results can offer the theory reference for improving or perfecting the control performances of automobile intelligent cruise system.
Keywords
Introduction
In recent years, with the rapid growth of vehicles’ number in the world, traffic jam is getting more and more serious and traffic accident rate continues to rise in every major city of the world that the residents’ travel environment starts to deteriorate and the life safety is under threat seriously. How to solve the problems on improving the driving safety and reducing traffic accident has already became a problem needing urgent resolution.
It is generally known that the adaptive cruise control (ACC) system as a safety assistant driving system can automatically adjust the cruise vehicle’s speed to keep a safe distance from the vehicle ahead through obtaining the lidar’s or radar’s information. Tsai et al. 1 have presented a fuzzy longitudinal control system with car-following speed ranging from 0 to 120 km/h to realize the main functions of both ACC and stop & go control. Sivaji and Sailaja 2 have proposed ACC for stop & go maneuvers of an intelligent vehicle using hybrid proportional–integral–derivative (PID) controller. Pei et al. 3 have proposed a layered algorithm for ACC based on throttle/brakes combined control. Chen et al. 4 present an intelligent control strategy of automobile cruise based on the throttle or braking pedal combined control adopting fuzzy control theory. Although the ACC system can follow the preceding target car to prevent rear-end collisions and improve the citizens’ travel environment to some extent, it does still exist the collision possibilities with the vehicle in front. For example, it doesn’t anticipate the vehicles in adjacent lane abruptly cutting to the cruise vehicle’ lane. Especially, the potential danger of the rear-end incident will increase greatly in the city road condition because there exists a number of curve roads, and it is much dense than other driving environment, and the frequent changing-lane behavior always happens. It is very critical for the control strategy to judge the only key target among the found multi-object, especially on the curve road because the ACC system is unable to recognize precisely the key target vehicle ahead from the confusion vehicles, or the following target is thoroughly lost. Moon et al. 5 have presented a target selection strategy for ACC in multiple vehicle traffic situations. Chen 6 has proposed a target selection algorithm of ACC system to distinguish a valid target on the curve road. Lee et al. 7 have presented a lateral system for an unmanned vehicle with the use of a proportional–derivative (PD) control. As a result, it is of great significance for improving or perfecting the control performances of ACC system to identify accurately the key target and avoid effectively rear-end collisions owing to the goal confusion or missing on the curve road and prejudge the dangerous changing-lane objects on the straight road.
A wide range of topics in effective target identification problem of the ACC system have been carried out all over the world by adopting radar technology or machine vision technology to determine lane markings or track the preceding target car. Moon et al. 8 have designed a multi-target tracking controller for ACC system to estimate the vehicle running conditions in the adjacent lane or in the cruise car lane based on Kalman filtering and multiple model filtering theory. Delphi Corporation proposes a target recognition algorithm to judge the target vehicle ahead based on the complexity of tracking scene by the information obtained from radar. Visteon Corporation has put forward a target determination algorithm to distinguish the target vehicle’s changing-lane occur at the entrance or exit of curved road through these phase diagrams of azimuth and relative velocity between the cruise car and the target vehicle. According to the above changing-lane result and yaw rate, the key target ahead is judged under different road conditions. 9 Lin et al. 10 have proposed a goal-selecting strategy to verify the target’s validity adopting Kalman filtering method according to the valid target’s lifecycle. Shin et al. 11 have reviewed past and current work in computer vision that aims at real-time lane or road. Velez et al. 12 have presented a novel reconfigurable embedded vision system that meets the requirements of advanced driver assistance system (ADAS) applications. Nieto et al. 13 have proposed a novel approach to real-time lane modeling using a single camera.
It is our goal to recognize the key target on the curve road accurately for avoiding goal missing or confusion and prejudge the changing-lane objects on the straight road to prevent rear-end incident.
The article is structured as follows. Section “The control concept of key target recognition” provides a control concept of key target recognition. Section “Key target recognition method” discusses fuzzy judgment method of key target on the straight road. On the basis of setting vehicle model with 3 degrees of freedom (DOF) considering roll motion, an extended Kalman filter (EKF) is designed to realize an estimation of road curvature. Model for key target on the curve road is proposed at the end of section “Key target recognition method.” The simulation results are presented in section “Simulation results” and concluding remarks are given in section “Conclusion.”
The control concept of key target recognition
Under complex driving environments on urban roadway, the traffic flow possesses the characteristics of high density and low speed, the changing-lane behavior always happens frequently that all can easily lead to rear-end collisions or traffic conflicts. Especially, the phenomenon of traffic conflict on the straight road is more obvious owing to the cutting-in or leaving frequently. For the curve road, there often exists this situation of goal confusion or missing owing to the lane shape is variable. If the system is unable to recognize the key target on the curve road, a potential rear-end collision could happen owing to the key target’s missing lead to accelerate or decelerate abnormally. Therefore, recognizing the key target accurately is critical for ACC that can prejudge the dangerous changing-lane objects and distinguish out the key target in the straight road condition as well as recognize out the key target among those confused multi-object in the curve road condition accurately. Figure 1 describes the general process on the key target recognition of Automobile Intelligent Cruise System (AICS).

Flow chart on the key target recognition of AICS.
Key target recognition method
Key target fuzzy judgment
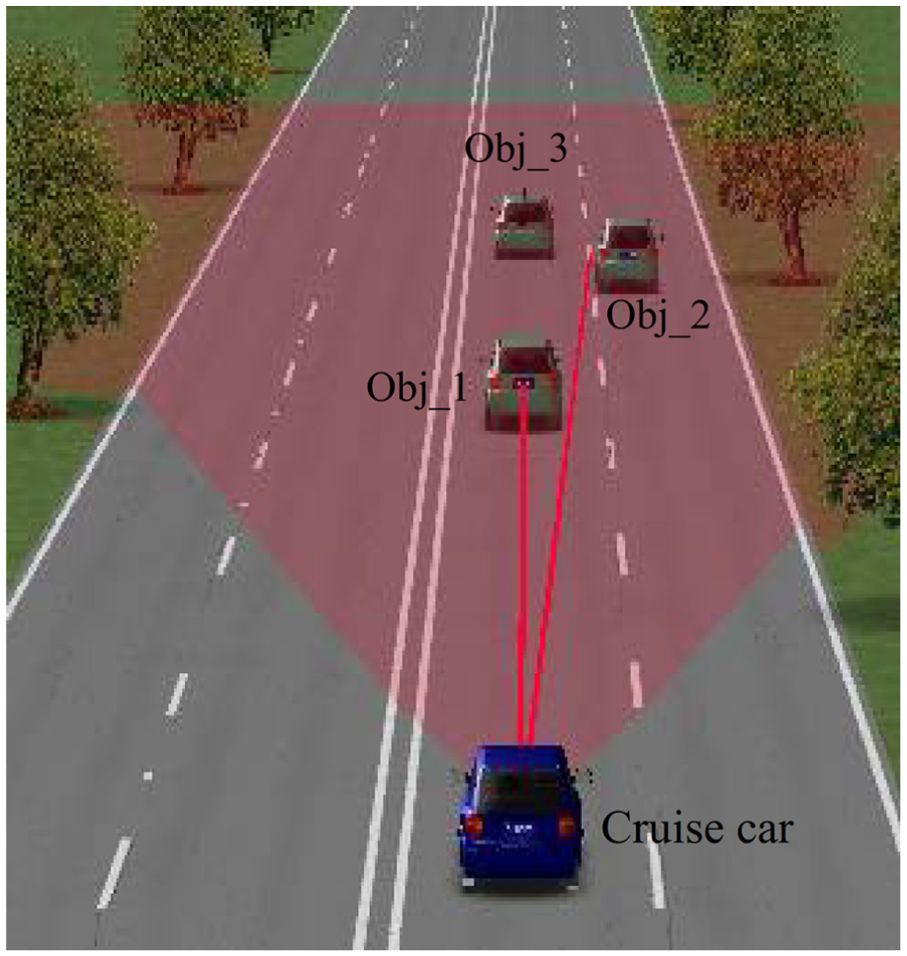
Figures 2 and 3 describe the multi-object vehicles’ driving situation whether a changing-lane behavior happes. For the first case, the multi-objects in front the cruise vehicle drives at itself lane without the changing-lane behavior; The second case is that, the multi-objects at the adjacent lane possesses a changing-lane trend. For the first case, the object (Obj_i) at host’s (the cruise vehicle) lane is confirmed as the key target naturally. But for the second case, the key target is generated from the multi-objects including the changing-lane vehicle at the adjacent lane and the front vehicle at host’s lane. Normally, the distance’s minimum among above multi-object from the cruise vehicle is considered as the only key target of AICS.

A driving situation without changing-lane objects.

A driving situation with changing-lane objects.
On the basis of above analysis, a fuzzy logistical controller is designed to prejudge the dangerous changing-lane objects and identify the key target on the straight road accurately. It is generally known that the intelligent control measures are considered as one of the powerful tools for achieving the goal because it does not rely on an accurate mathematical model.14–20 Fuzzy logical control represents the human reasoning methods in a very effective way and it is suitable for dealing with nonlinear and uncertainty control system.21–25
Fuzzification of input and output variables
As you can see from Figure 3, when an object vehicle at the adjacent lane changes itself lane, its lateral velocity and distance relative to the cruise vehicle will change. Therefore, the fuzzy logistical controller includes two input variables, the lateral relative velocity (LV) and the lateral relative distance (LD). The output variable (CP) of the longitudinal controller is the changing-lane probability. The two input variables (LD and LV) of the longitudinal controller are transferred into five fuzzy language variables, respectively, including N (near), NM (nearer), M (middle), MF (farther), F (far), L (low), LM (lower), M (middle), MH (higher), and H (high). The output variables (CP) of the fuzzy controller are also transferred into five fuzzy language variables, including S (small), SM (smaller), M (middle), MB (biggish), and B (big). The alterable domain range for the LD, LV, and CP is respectively, {0, 1.8, 2.15, 2.5, 2.85, 3.2, 4}, {0, 0.2, 0.45, 0.7, 0.95, 1.2, 1.4}, and {0, 0.2, 0.35, 0.5, 0.65, 0.8, 1}. Where, the membership functions of all variables adopt the trapezoid shape distribution as formula (see Figure 4).
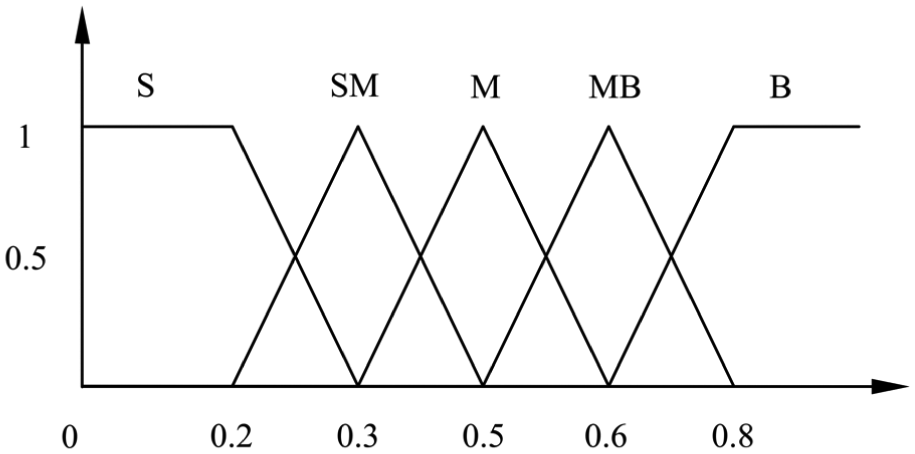
Membership function of the output variable CP (or LD, LV).
Construct rule base
The fuzzy rule base accumulates a great amount of expert knowledge and experiences.26–28 Table 1 gives 25 fuzzy control rules between the variables.
Fuzzy control rule between the input and output variables.
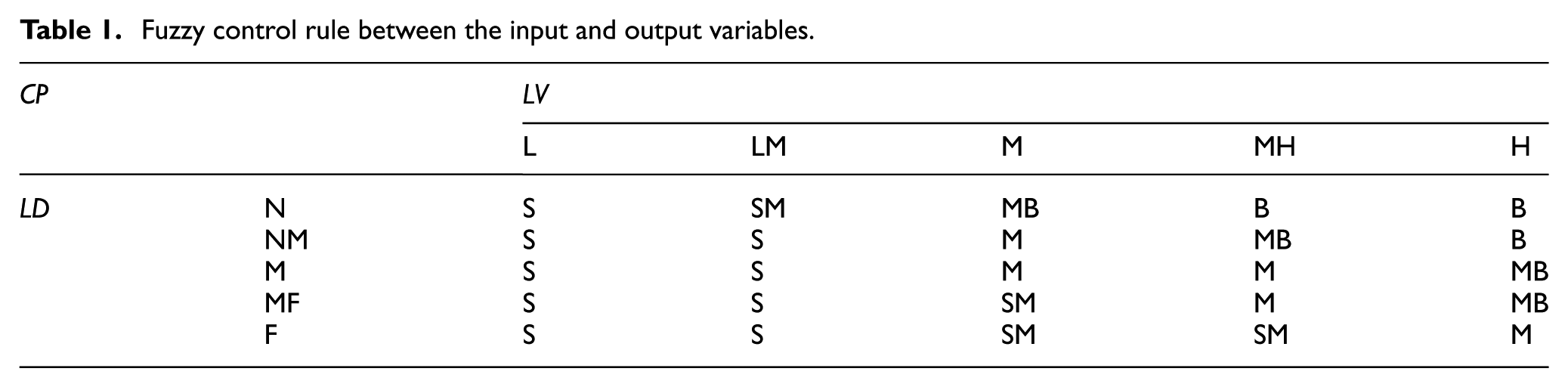
Fuzzy control rules are characterized by If-Then statements involving fuzzy linguistic variables. For example, the generic form of fuzzy rules in the case of multiple-input single-output system (MISO) is: If x is Ai, …, and y is Bi, Then z is Ci, i = 1,2, …, n.
For Table 1, if the relative distance LD is N, and the relative speed LV is L, then the output CP is S. This rule denotes that the lateral relative distance is very near, but the velocity relative to the cruise vehicle is very small, it is considered as non-changing lane. Furthermore, if the relative distance LD is N, and the relative speed LV is H, then the output CP is B. This rule shows that the lateral relative distance is very near, and the relative velocity is very quick, the changing-lane behavior would happen certainly.
Deffuzzification
The defuzzifier is utilized to yield a non-fuzzy decision or control action from an inferred fuzzy control action by the fuzzy reasoner. The method on the center of gravity is used to calculate the defuzzified output.
Key target recognition on the curve road
Nonlinear 3-DOF vehicle model
In the latest study, I found that most of the vehicle models estimating vehicle state based on the EKF, cubature Kalman filter (CKF), or unscented Kalman filter (UKF) algorithm use a simple motorcycle model, a simple motorcycle model with the tire magic formula, or a simple 3-DOF vehicle model, which do not take into account the effects of vehicle body roll motion.29,30 So, a nonlinear 3-DOF vehicle model including the longitudinal, lateral, and yaw direction is proposed for estimating the road curvature in real time considering roll motion of vehicle body (see Figure 5).
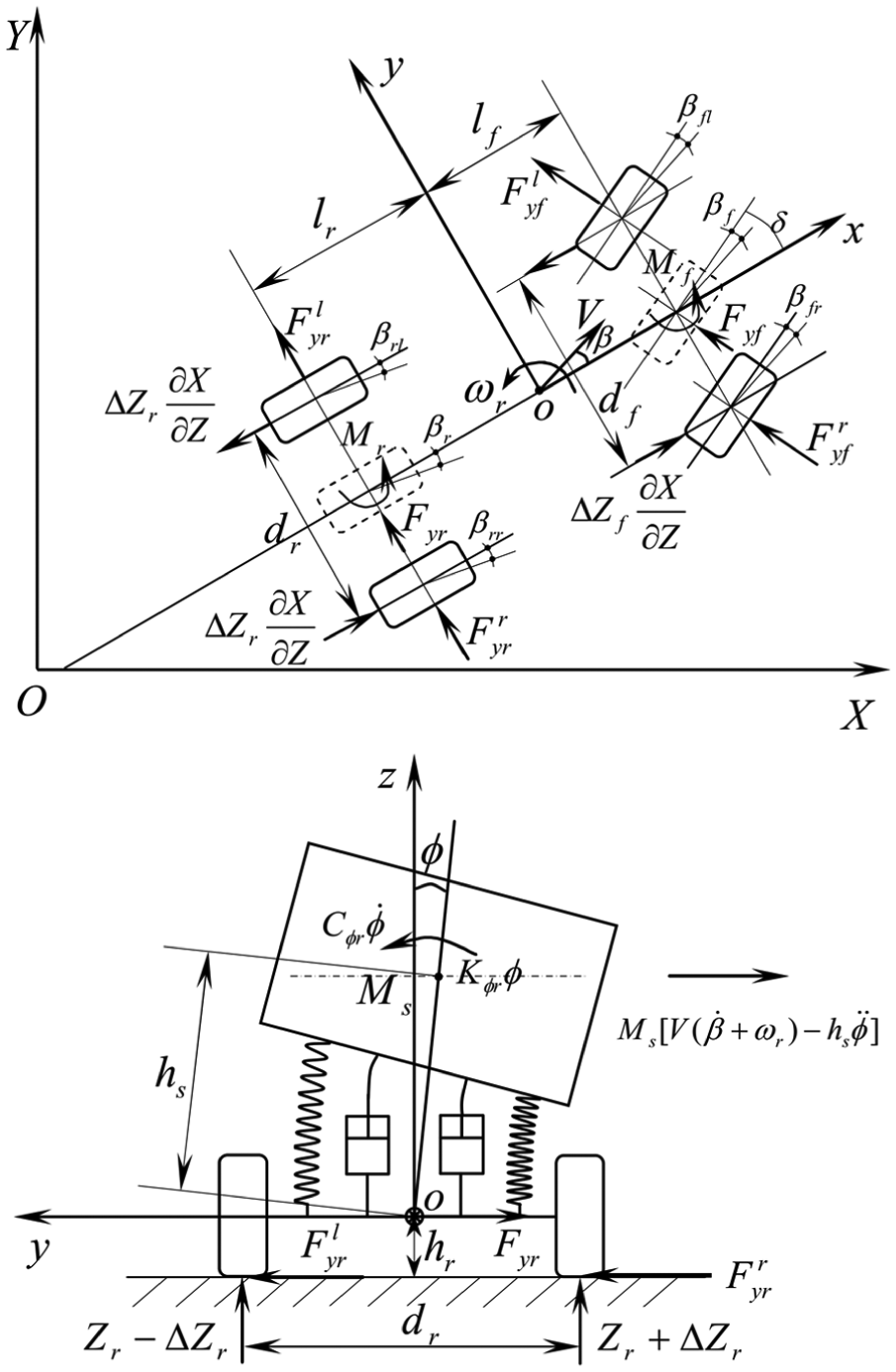
A simplified vehicle model with 3-DOF.
In Figure 5, V is the driving velocity; ωr represents the yaw rate; β denotes the body sideslip angle; δ denotes the vehicle’s front wheel turning angle; βf and βr denote the converted sideslip angle of the front and rear wheel, respectively; Fyf and Fyr represent the converted cornering force at the front and rear wheel, respectively; lf and lr represent the length from the front axle and rear axle to the vehicle centroid, respectively; df and dr represent the wheelbase between the left and right wheel, respectively; hf and hr denote the distance between the floor and the interaction point generated by the lateral inertia forces affect to the front and rear axle, respectively; ϕ denotes a roll angle of the suspended mass Ms; Mf and Mr represent the aligning torque generated by the tire sideslip; and ΔZ denotes a change in load resulting from the roll motion of vehicle body.
The join forces equation at y direction is described as equation (1), which represents a force equilibrium relationship at y direction

The join torque equilibrium equation about the Z-axis is as follows

The join torque equilibrium equation about the entire vehicle mass rotates around X-axis as follows

Supposing the cornering force at the front and rear wheel is equal, so
Here, αf and αr represent the roll steering angle, respectively, and are expressed as follows:


Kϕf and Kϕf represent the sideslip angle stiffness coefficient of the front and rear suspension, respectively. Cϕf and Cϕr denote the sideslip angle damping coefficient of the front and rear suspension.
Equations (1)–(3) are rearranged as follows. The join forces equation at y direction is

In the join forces equation (4), the coefficients are listed as follows


The join torque equation about the Z-axis is

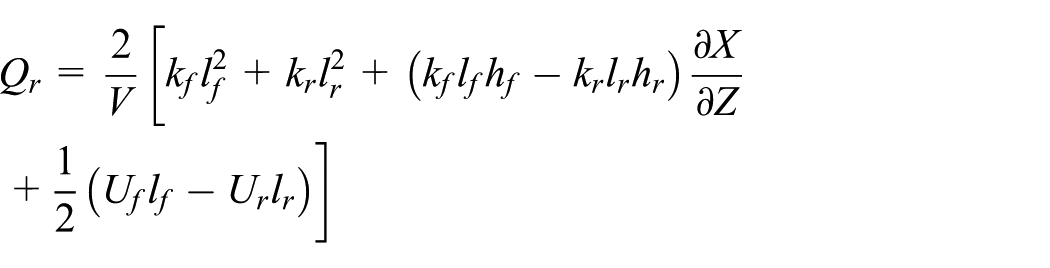
In equation (5), the coefficients are listed as follows




The join torque equation about the X- axis is

In equation (6), the coefficients are listed as follows

The differential equation from equations (4)–(6) are expressed as the state equation as follows



Equation (7) may be classified as follows

So, equation (7) may be rewritten as shown in equation (8) as follows

Here,
Road curvature estimation based on the EKF theory
EKF algorithm is a kind of prediction correction algorithm in pattern recognition field. 31 According to an estimated object, the state and measurement equation are setting up and the nonlinear model was linearized to realize the state vector’s recursive estimation including the forecasting process and calibration process as follows:
1. The state and measurement equation


xk and yk represent the actual state vector and measurement vector, respectively. uk − 1 is a control vector. wk − 1 and vk − 1 represent the process noise and the observation noise, respectively.
2. Model linearization

F(k) and H(k) represent the Jacobian matrix of the nonlinear function f(xk, uk, wk) and h(xk, uk) taking the derivative with respect to state vector. Φ(k) denotes the state transfer matrix. Δk is a sample interval.
3. The recursive process of the EKF algorithm.
The recursive process of the EKF algorithm mainly includes two processes, the forecasting process and the calibration process as follows:
1. Forecasting process.
a. State prediction equation

Here, [A] and [B] denote the coefficient matrix on the state variable of the discretization prediction equation, respectively.
b. Error covariance forecasting equation

Here, Qk denotes the covariance matrix of the process noise wk.
2. Calibration process
a. Gain matrix

Here, Rk denotes the covariance matrix of the observation noise vk.
b. Updating the state estimation

c. Updating the error covariance equation

On the basis of the nonlinear 3-DOF vehicle model (see equation (7)), an EKF on yaw rate is established for estimating road curvature in real time according to the process of the EKF algorithm (see equations (12)–(16)). The estimation value would be applied to the target recognition model on the curve road.
Target recognition model on the curve road
Here, supposing that the road curvature ρ is fixed value which can be determined according to the velocity (u) to the yaw rate (wr) of the cruise vehicle ratio as follows

Figure 6 describes the sketch map of determining key target on curve road in front cruise vehicle. Let us suppose the target vehicle turning right and pointing to rotation center as positive direction. Here, taking target_i in front cruise vehicle as the research object, its trajectory radius is calculated as follows

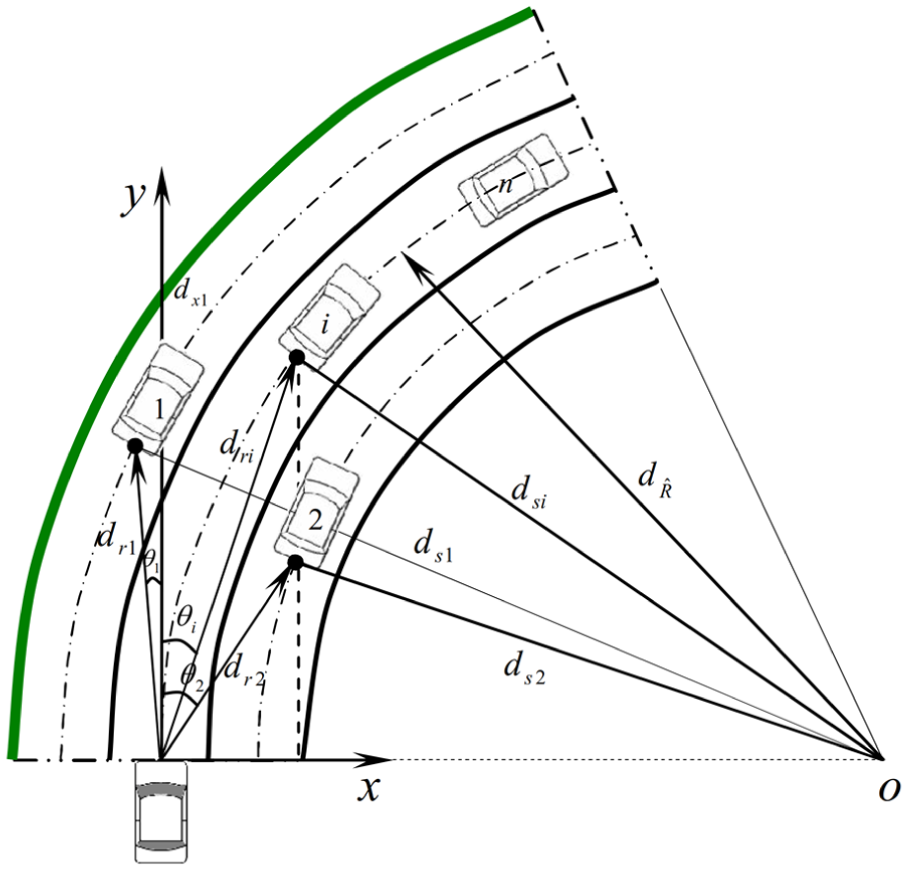
Determination of key target at the cruise vehicle’s lane.
The lateral offset doff_i relative to the target_i can be obtained by the difference between the road curvature radius

According to the lateral offset, it can judge whether the target_i is at the cruise vehicle’s lane by following judgment rules:
If doff_i > 0 and |doff_i| > dth, then target_i drives along the right lane of the cruise vehicle.
If doff_i < 0 and |doff_i| > dth, then target_i drives along the left lane of the cruise vehicle.
If |doff_i| ≤ dth, then target_i drives at the cruise vehicle’s lane.
Here, dth denote a threshold. It is usually preferable to a half of lane width or other value connecting with the actual situation.
Simulation results
In order to validate the feasibility and effectiveness of the proposed key target fuzzy judgment method, some simulation scenes on straight road situation are built using Carsim simulation software.
Figure 7 describes a simulation case on straight road before changing-lane in Carsim circumstance. Here, the lane width is set to 4 m and the driving velocity is 20 m/s. The Obj_1 drives at a constant speed in front cruise vehicle 50 m on the left lane. The Obj_2 drives at a constant speed in front cruise vehicle 80 m on the right lane. The Obj_3 drives at a constant speed in front cruise vehicle 90 m on the cruise vehicle’s lane.

Straight road driving case before changing-lane in Carsim circumstance.
In Figure 7, the Obj_1 makes a decision to change lane with the lateral velocity about 1 m/s at fifth second and enters into the cruise vehicle’s lane at eighth second. The Obj_2 drives to the left lane line at fifth second about 2 s with the lateral velocity about 0.5 m/s, but has not changed lane. Figure 8 describes the changeable process above.
Changing-lane case on the straight road in Carsim circumstance.
Aimed at the change process from Figures 7 and 8 in Carsim circumstance, the proposed key target fuzzy judgment method is tested adopting Carsim and MATLAB/Simulink co-simulation based on the fuzzy logistical controller as in Figure 9.

Simulation result of distance from the target vehicles to the center line of the cruise vehicle trajectory.
It can be seen from Figure 9 that the Obj_1 lateral distance to the center line of the cruise vehicle trajectory has changed distinctly between the fifth second and the eighth second. Furthermore, as can be seen from Figure 10, the probability of the Obj_1 changing-lane is more than the critical threshold (0.51) of changing-lane. It really shows that the Obj_1 realized the changing-lane process to cut into the cruise vehicle’s lane. But the Obj_2 lateral distance to the center line of the cruise vehicle trajectory only has a small change between the fifth second and the seventh second that shows the Obj_2 has not changed itself lane ultimately. Also it can be seen from Figure 10 that the changing-lane probability of the Obj_2 is less than the critical threshold of changing-lane.
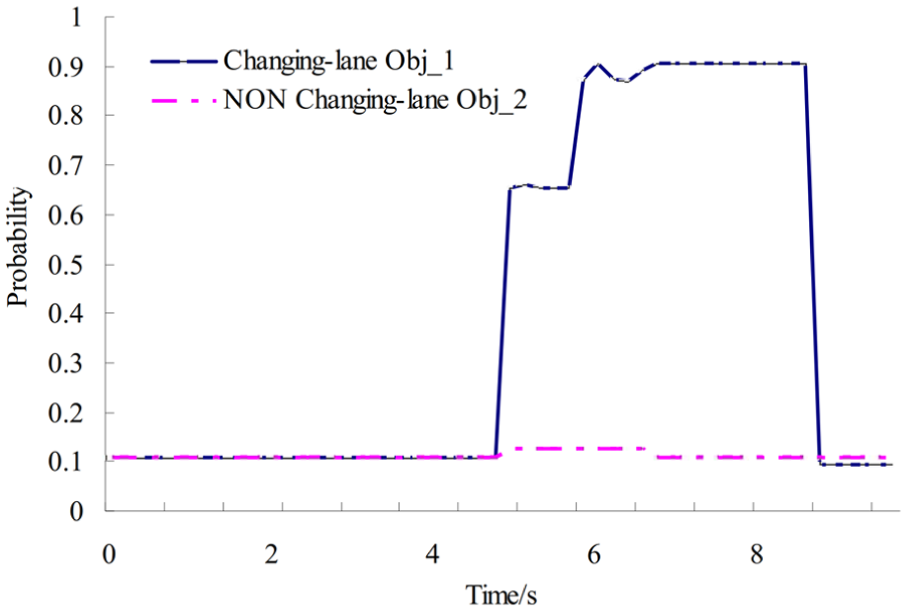
Simulation result of changing-lane probabilities.
Figure 11 shows the simulation result of the critical threshold (0.51) on changing-lane probability. It can be seen from Figure 11 that the Obj_2 and the Obj_3 had experienced the critical point of changing-lane probability. The Obj_1 and the Obj_2 have changed their own lane (The Obj_1 returned to the original lane again after changed lane). But the Obj_3 and the Obj_4 have possessed evidently the characteristic of the non-changing-lane. So, the critical threshold of changing-lane probability has been set to 0.51.

Critical value on the changing-lane probabilities.
As can be seen from Figures 9–11, the changing-lane Object can be distinguished by the probability of changing-lane and the lateral offset distance. It really shows that the designed fuzzy controller has good robustness for prejudging the dangerous changing-lane objects on straight road.
For the target recognition on the curve road, the road curvature is a key indicator. It is necessary to ensure the accuracy of estimating road curvature in real time based on the EKF algorithm before verifying the effectiveness of the proposed key target recognition method. Therefore, the yaw rate and the body sideslip angle have been estimated adopting double lane input according to the EKF algorithm. The vehicle’s structure parameters are listed in Table 2 and the estimation result is shown in Figures 12 and 13.
Vehicle module parameters.


Comparison results on automobile’s yaw velocity.
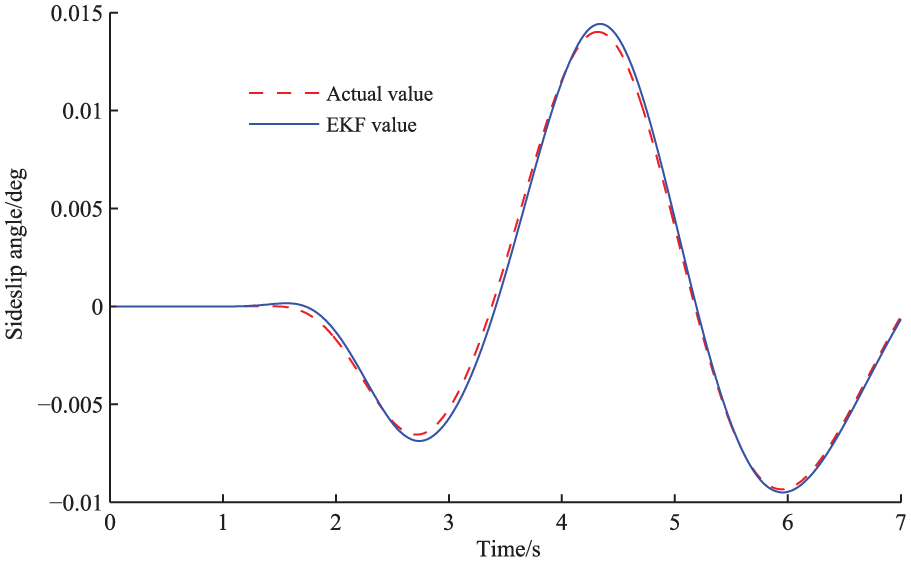
Comparison results on automobile’s sideslip angle.
As can be seen from Figures 12 and 13, the estimate values on the yaw rate and the body sideslip angle agree well with the actual value which shows the designed EKF is feasible and effective to estimate road curvature.
Next, the effectiveness of key target recognition method on the curve road needs to be examined. In Carsim circumstance, a series of module on the vehicle, radar sensor, road, and motion target have been built to simulate the driving cases on curved road. Radar sensor is mounted on the front bumper center of the cruise vehicle.
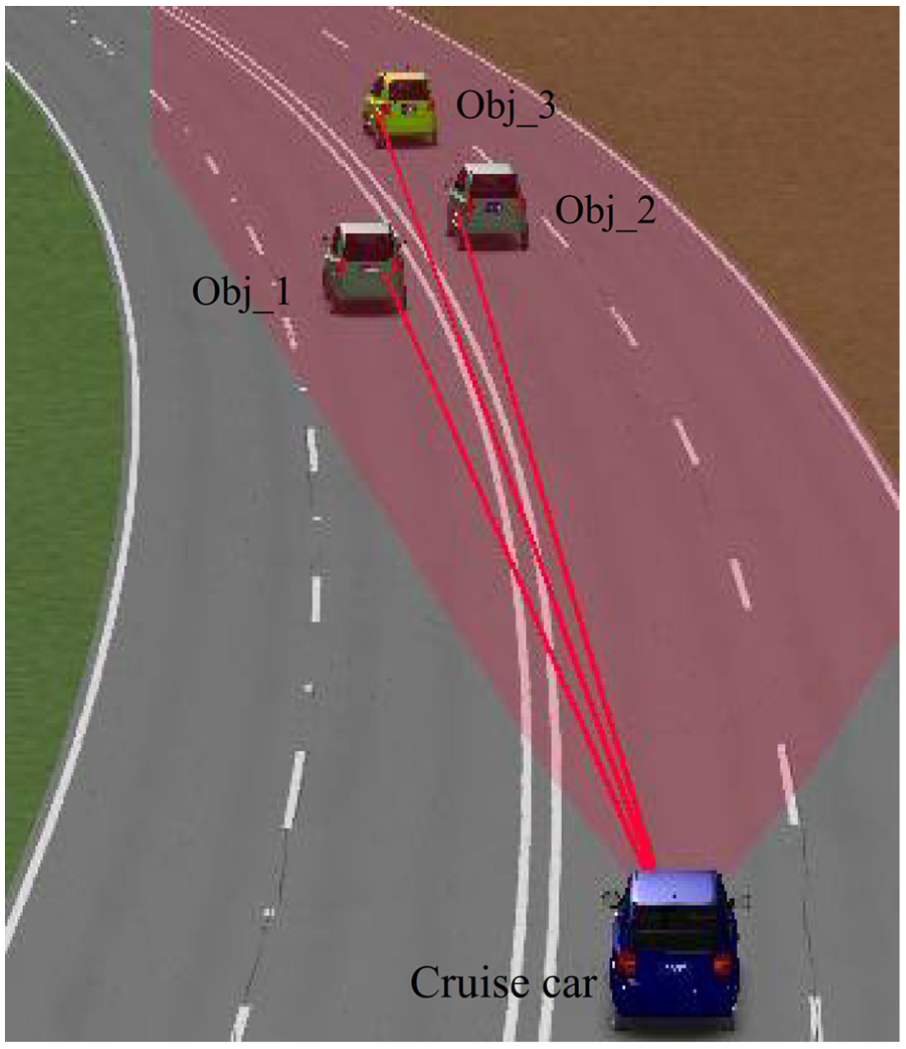
Figure 14 describes a simulation case on curve road without changing-lane in Carsim circumstance. Here, the lane width is set to 4 m and the driving velocity is 20 m/s. The radar sensor can measure the front object about 100 m. The Obj_1 drives at a constant speed in front cruise vehicle 60 m on the left lane. The Obj_2 drives at a constant speed in front cruise vehicle 80 m on the right lane. The Obj_3 drives at a constant speed in front cruise vehicle 90 m on the cruise vehicle’s lane.

Curve road model in Carsim circumstance.
Figure 15 shows the simulation result of distance from the target vehicles to the center line of the cruise vehicle trajectory adopting the target recognition method on curve road. From this figure, it can be seen that the Obj_1 and Obj_2 lateral distance to the center line of the cruise vehicle trajectory are 3.75 and 3.3 m, respectively. But the lateral distance of Obj_3 to the center line of the cruise vehicle trajectory is about 0.8 m that is less than a half of lane width. So, the obj_3 is regarded as the key target at the cruise’s vehicle lane. The recognition result is consistent with the case of Figure 15. It is worth mentioning that radar’s measurement point to front target is the vehicle’s side on curve road because this side point is nearest to the radar location about a half of vehicle width (see Figure 14). But on straight road, the radar’s measurement point to front target is ought to the target vehicle’s center (see obj_1 in Figure 8).

Simulation result of distance from the target vehicles to the center line of the cruise vehicle trajectory.
On the basis of Figure 14 circumstance, the Obj_2 has realized the changing-lane process to cut into the cruise vehicle’s lane. The other target vehicle has not changed lane (see Figure 16). Figure 17 shows the simulation result of the lateral relative distance on different targets in process above.
Curve road model with changing-lane object in the Carsim circumstance.

Simulation result of the lateral relative distance.
From Figure 17, the lateral distance of Obj_2 to the center line of the cruise vehicle trajectory decreases from 3.3 to 0.8 m. It is worth mentioning that the lateral distance of Obj_2 has changed about 8 s moment because of the instability in the changing-lane process. Therefore, the Obj_2 and the Obj_3 are driving at the cruise vehicle’s lane. Finally, the Obj_2 is considered as the key target because of its longitudinal distance to the cruise vehicle is less than the distance between the target Obj_3 and the cruise vehicle.
Conclusion
A vehicle model with 3-DOF is discretized and an EKF is proposed for estimating the road curvature in real time. Adopting double lane input, the yaw rate and the body sideslip angle have been verified according to the EKF algorithm. The results show that the filter based on the 3-DOF model is feasible to estimate the road curvature. A multi-object recognition model of AICS is established to realize the identification of the key target on the curve road accurately by counting the lateral offset between the estimated road curvature radius and the target trajectory radius. Moreover, the designed multi-objects changing-lane fuzzy controller has excellent judgment skill to prejudge the dangerous changing-lane objects in the straight road condition. Co-simulation results indicate that the recognition method can identify the key target on curve road and prejudge the dangerous changing-lane objects on the straight road accurately.
Future work will focus on recognizing a key target of changing-curvature road on the basis of the technology of data fusion adopting radar sensor and mechanical vision.
Footnotes
Academic Editor: Yongping Pan
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported, in part, by the Natural Science Foundation of China under grants 61473139 and 61622303, the joint fund of the Natural Science Foundation of Liaoning Province of China 201602368, and the project for Distinguished Professor of Liaoning Province.