
Abstract
This article investigates the memory-based state-feedback control with strict passivity performance for nonlinear systems in delta domain. Takagi–Sugeno fuzzy model of delta operator form is adopted as an approximator of the investigated nonlinear plant with system perturbations/exogenous disturbances. The nonlinear output of the plant, which is accompanied with complex exogenous disturbances, is formulated as the passive output satisfying a pre-designed strict passivity performance. The memory-based state-feedback controller is expressed with a known memory coefficient to significant the influence of the delayed states. The resulting closed-loop system is inferred as a time-varying delay system, of which the stability and passivity criterion is carried out via a general fuzzy Lyapunov–Krasovskii functional approach. Then, parametric gains of the desired strictly passive memory-based controller are designed subject to a set of solvable matrix inequalities. Finally, a numerical example shows the validity of the proposed memory-based passive control method.
Introduction
It is well known that the Takagi–Sugeno (T-S) fuzzy model1,2 has been recognized as one of the most effective approaches to formulate complex nonlinear systems. In T-S fuzzy model, some local linear systems can be interpolated by the so-called membership functions in a unit framework. In the past few decades, the problem of stability analysis and controller synthesis by the utilization of T-S fuzzy models has been widely investigated (see, for example, Feng, 3 Liu et al., 4 Su et al., 5 Lam and Lauber, 6 Liu et al., 7 Wu et al., 8 and Wei et al. 9 and references therein).
As an impactful control methodology in control systems, passivity control has been successfully applied in engineering applications, such as electrical circuit systems, mechanical systems, and complex network systems.10–13 Under the passive control forces, the internal stability of the plant can be kept and even the stability can be improved. Therefore, the passive control problems have been investigated for fuzzy systems.14–16 For instance, considering the time-varying delays in T-S fuzzy systems, Zhang et al. 15 designed a very-strict passive controller. A robust passive control scheme was presented in Wu et al. 16 for networked fuzzy systems with randomly occurring uncertainties.
It is remarkable that as a branch of sampling systems, delta operator–based systems17,18 have been made good use for excellent finite word length performance under fast sampling. For discrete-time control systems, delta operator systems abide the concept that the shorter the sampling period, the better the system performances. 19 Benefiting the virtue of delta operator systems, numerical ill-conditioning experienced in algorithms of discrete-time system can be avoided when the sample period is sufficiently small. To point a few, Li and Gevers 20 introduced the relationships of optimal realization sets between shift and delta operator. According to the delta operator formulation, Tadjine et al. 21 overviewed the design features of a loop transfer recovery controller both at input and output. A strictly positive real control with low-frequency range was studied in Yang and Xia 22 for delta operator systems. For a class of time-delay systems with mismatched parametric uncertainties, Xia et al. 23 investigated the robust sliding-mode control. An output-tracking control scheme of delta operator time-delay systems was presented in Gao et al. 24 By using the T-S fuzzy model, the fault detection problem was concentered in Li et al. 25 for nonlinear delta operator systems. Very little results have been reported on delta operator–based fuzzy controller in literatures, such as time-delay system. 26 However, to the best of our knowledge, the memory-based controller design, especially with passivity performance for delta operator nonlinear systems, receives little attention now.
Based on the discussion above, in this article, we devote to the memory-based passive control of discrete-time T-S fuzzy systems using delta operator approach. For the investigated fuzzy delta operator systems, a very-strict passivity index is established. We formulate memorized information of the system state in a fuzzy controller including a memory coefficient. Then, the closed-loop system is formulated as a time-varying delay system. We use a fuzzy Lyapunov–Krasovskii functional (LKF) to analyze the passivity and stability of the resulting time-delay system. This work contributes to the following points: (1) a memory-based fuzzy controller is established fully considering memorized information of the system state; (2) passivity criterion of the investigated delta operator system is constructed; and (3) a solvable solution of the memory-based passive control subject to a set of linear matrix inequalities (LMIs) is presented. Finally, the presented memory-based passive controller is validated by using a numerical example.
The subsequent context of this article is organized into four sections: Section “Problem descriptions” describes the formulations of the delta operator system and memory-based fuzzy controller. Section “Main results” presents the passive control design and stability analysis. Section “Simulation example” provides an illustrative example to show the effectiveness of the proposed memory-based passive controller. Section “Conclusion” concludes this article.
Notation
Let
Problem descriptions
Based on the delta operator, we present the following T-S fuzzy model with
Fuzzy rule
If

where
Then, the defuzzified model of system (1) is inferred as follows

in which, we simplify
and

where

with

where

We detail the following definition and a lemma for the basis of the design procedure in the following context.
Definition 1
System (6) is said to be very strictly passive if there exist constants
Lemma 1
For any matrix

where
Remark 1
According to Definition 2, this article aims to design the desired memory-based controller in such that the resulting time-delay system (6) is very strictly passive and its asymptotic stability can be guaranteed. The very strictly passive control design procedure for system (6) will be detailed in the following section.
Main results
In terms of the overall system (6), the fuzzy Lyapunov functional approach to derive the passivity criterion with a sufficient condition is used in this section. Then, a set of LMIs are developed to solve the solution of the parametric matrices of the desired memory-based fuzzy controller.
Theorem 1
In terms of the delta operator system (6) with a sampling period


where

Proof
For simplicity, we denote

where

in which
According to the following formula 29

we calculate

Using Lemma 1, we have

Besides, for any matrix

Then, according to the statement in Definition 1, it results that

where
Furthermore, from Theorem 1, we can rewrite that

Using Schur complement, we know that

That is to say
where
In the following theorem, we develop the conditions in Theorem 1 to some solvable LMIs for designing the parametric matrices of controller (4).
Theorem 2
In terms of the delta operator system (6) with a sampling period


where

The fuzzy memory–based control gain matrices are determined by

Proof
First, we let
As a supplement, we give an asymptotic stability criterion of the proposed memory-based control system in

Following the procedure in Theorems 1 and 2, we infer the following two corollaries for memory-based control system (14).
Corollary 1
For some constants


where

Then, the parametric matrices of memory-based controller (4) are determined by
Simulation example
In terms of the proposed memory-based control method, we provide a numerical example to illustrate its validity. Consider the following system matrices of the two-rule fuzzy nonlinear plant with exogenous disturbance in equation (1)

The corresponding sampling period is supposed as

Assume that the disturbance is

State response of the open-loop system.
Output response of the open-loop system.

State response of the closed-loop system.

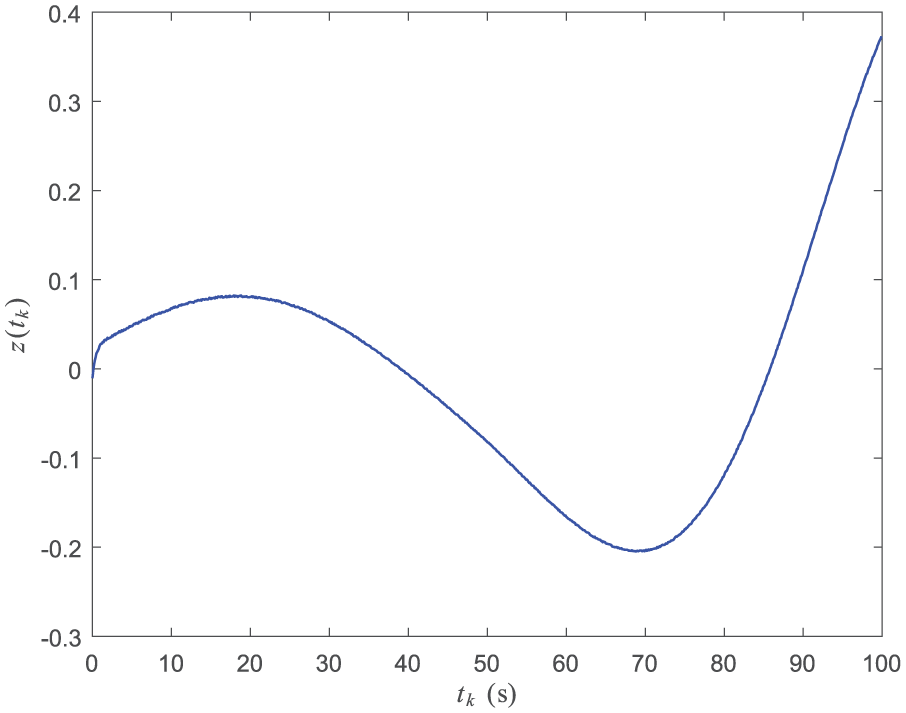
Output response of the closed-loop system.

Control force of the closed-loop system.
On one hand, the open-loop system is divergent from the trajectories as depicted in Figures 1 and 2. On the other hand, when applying the memory-based controller to the considered plant, we obtained the following simulation results. By the following calculations,
Remark 2
The simulation results show that the simulated plant which is unstable has been effectively stabilized, and the passivity of the control system is satisfied. In engineering applications, the discrete-time control system in terms of the delta operator can be represented as the form of system (1). 26 Then, the system parametric matrices can be obtained and the controller matrices can be solved according to the criterion in Theorem 2. Specific control procedure can be applied referencing the provided simulation example.
Conclusion
This article has coped with the memory-based very strictly passive control problem of nonlinear systems in delta domain. The delta operator nonlinear plant with nonlinear controllable output is approximated by T-S fuzzy models. The output passive index has been formulated and passivity criterion has been detailed. Considering a known memory coefficient, the memory-based state-feedback controller has been expressed, which is subject to a set of solvable LMIs, to memorize the influence of the delayed states. Stability condition has been provided using Lyapunov stability theory. Finally, the numerical example has validated the effectiveness of the proposed memory-based passive control scheme. Additionally, future work will be concerned with some advanced memory-based control problems when the system states are constrained, such as unmeasurable states and states with stochastic process. Furthermore, motivated by the approach to deal with the time delay and filtering,30–32 some conservativeness can be reduced.
Footnotes
Academic Editor: Hamid Reza Karimi
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was partially funded by the National Natural Science Foundation of China (grant nos 61501141 and 61403316), China Postdoctoral Science Foundation–funded project (grant no. 2016M590283), and the Postdoctoral Research Funds of Heilongjiang Province (grant no. LBH-Z15068).