
Abstract
Planetary gears are recognized as one of the most effective forms of power transmission. A dynamic model of an N-stage power-split planetary gear set is proposed in this article. Three-dimensional translations and axial rotation of all members, mesh stiffness, bearing stiffness, and the interstage coupling stiffness are considered. Subsequently, equations of motion of the whole system are derived. Natural frequencies and vibration modes are obtained by solving the eigenvalue problem governed by corresponding equations. According to the modal properties, all vibration modes of the N-stage system can be categorized as N + 2 groups: the overall axial translational–rotational mode, the overall radical translational mode, and the ith-stage planet mode (Ni > 3). Furthermore, the typical vibration modes of a two-stage system are graphed. It is also found that the radical interstage coupling stiffness has an impact on natural frequencies of the overall radical translational modes, while the axial and twist coupling stiffness only affect the natural frequencies of the overall axial translational–rotational modes.
Introduction
Planetary gears are widely used in aerospace and wind turbine industries because of their high reliability, high torque, and compactness. 1 The closed-form planetary gears are more competent due to the power-split characteristic and higher transmission ratios. However, compared with simple, single-stage planetary gears, they suffer more strength and vibration which are the major factors that influence the reliability and durability of the system. Therefore, it is significant for designers to accurately establish the dynamic model of the multi-stage planetary gear system and to make further researches on its dynamic characteristics. The free vibration characteristics analysis is an important method for designers to avoid powertrain resonances effectively 2 to keep away from the sensitive areas of some system parameters 3 and to optimize structures.
Numerous investigations have been conducted over the last four decades. Both analytical models4–13 and finite element models14–18 are established by designers. Cunliffe et al. 8 established a lumped-parameter model of a single-stage planetary gear and analyzed the natural characteristics, and they validated the lumped-parameter model by comparing the analytical results with experiments. Botman 9 investigated the natural characteristics of a multi-degree planetary gear, and the influence of carrier speed and planet stiffness on the vibration mode was also derived by the numerical method. Kahraman 10 proposed a torsional dynamic model and obtained the analytical expression of natural frequencies. Then, he extended the model to three dimensions and obtained the natural modes. 11 Lin and Parker12,13 developed the transverse–torsional dynamic models of single-stage planetary gears and analytically investigated the natural frequency spectra and vibration modes with equally spaced and diametrically opposed planets. Guo and Parker19,20 developed a purely rotational model of general compound planetary gears and then studied the sensitivity of natural frequencies and vibration modes to inertia and stiffness parameters. Compared with the translational–rotational model, the rotational model is simplified by ignoring the effect of supporting stiffness. The relative researches indicated that natural frequencies calculated by those two kinds of models have slight differences. 10 Kahraman 21 also pointed that the predictions of those two kinds of models coincide quite well when bearing stiffness is an order of magnitude higher than mesh stiffnesses. As for the dynamics of the multi-stage planetary gears, most models proposed by the investigators are the purely rotational models. Li et al. 22 established the nonlinear torsional vibration model of a two-stage planetary gear system and analyzed the solution of the equations by using ODE45. Kiracofe and Parker 23 established the rotational dynamic model compound and multi-stage planetary gears, and investigated the structured vibration mode and natural frequency properties of the system. With those analyses, researchers further investigated the vibration reduction by detecting the influences of system parameters on dynamic response, such as mesh stiffness fluctuation,24–26 mesh phasing relationships,27–29 and contact ratios. The behavior that natural frequencies tend to gather into clusters with arbitrary planet spacing is observed experimentally and analyzed in detail further by Ericson and Parker. 30
Up to now, axial translations are generally ignored in the dynamic models of spur planetary gears established by designers. Investigations for simple, single-stage planetaries are adequate while few references about the closed-form, multi-stage planetary gears are found. Dynamic models of multi-stage planetary gears are quite limited. What’s more, coupling factors between stages have great influence on the dynamic characteristics of the whole planetary gear train (PGT).
In this article, a dynamic model of a multi-stage power-split planetary gear set considering the three-dimensional translation and axial rotation is established to investigate the modal properties of the system. Dynamic equations of motion are derived in section “System model and equations of motion.” Section “Natural frequencies and vibration modes” mainly discusses the free vibration characteristics of the multi-stage power-split planetary gear set and generalizes the features of natural frequencies and natural modes. In this section, the vibration modes are classified into several types according to their key modal properties. Then, the influence of coupling stiffness on vibration characteristics is investigated in section “Interstage coupling stiffness influence on modal properties.” Finally, the conclusion is presented in section “Conclusion.”
System model and equations of motion
An N-stage power-split PGT shown in Figure 1 is investigated in this study. The transmission system is composed of an (N − 1)-stage differential planetary gear set and a quasi-planetary gear set. The (N − 1)-stage differential planetary gear set is also composed of differential planetary gears of same structure. The sun gear in the first stage is the input member. The first and second stages are linked by the carrier in the first stage and the sun gear in the second stage, as well as the rings. The last stage is a quasi-planetary gear set. The sun gear of the last stage is connected with the carrier of the (N − 1)th stage. Rings of those two stages are also linked. The dynamic model is based on the lumped-parameter method. A few assumptions are employed here.13,31
Gears are assumed as rigid disks. The interactions between gear pairs are molded by linear springs acting along the line of action. The stiffness of spring equals to the mesh stiffness. The interactions between two stages are also represented by linear springs.
The axial translation for all members is considered.
Planets in the same stage are identical; the friction at the gear meshes is neglected; and radial and circumferential error of planets is also ignored in the system.
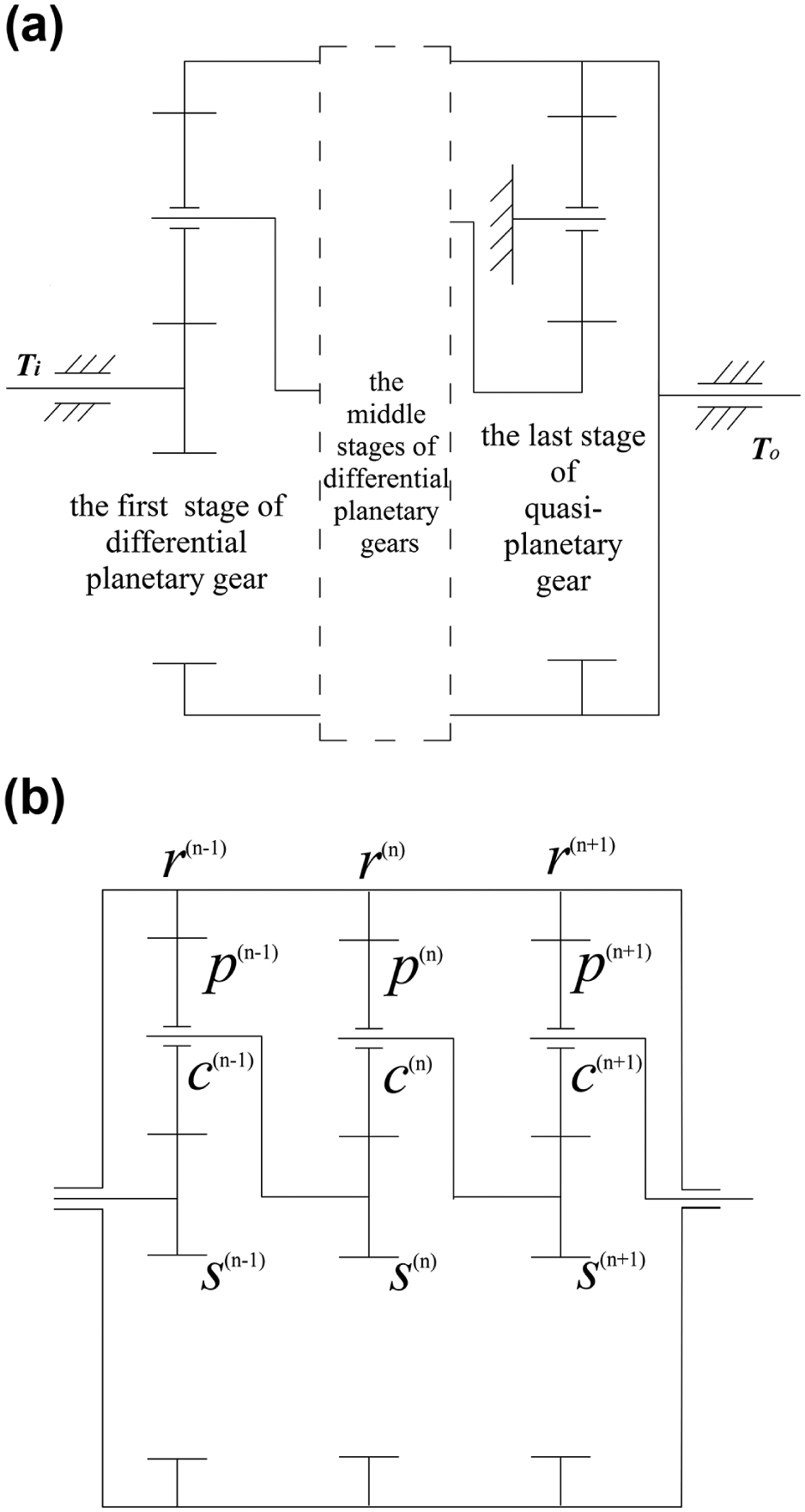
Discrete model of N-stage PGT: (a) sketch of the N-stage PGT and (b) sketch of middle stages.
Figure 2 shows the three-dimensional lumped-parameter model of a single-stage PGT. Three-dimensional translation and the axial rotation are considered for members. The damping is not shown in the model. By choosing reasonable stiffness, any stage of the system in Figure 1 can be represented by Figure 2. Component bearings, gear meshes, and interactions between adjacent stages are modeled by linear springs. The stiffness which equals to a bearing or spline support stiffness is dependent on the specific kinematic configuration.
13
The number of planets in stage i is

Lumped-parameter model of a single-stage PGT.
Relative displacement analyses
The relative displacements of members in the same stage are derived below.
Relative displacement of sun-planet mesh

Relative displacement of ring-planet mesh

Relative displacement between planet and carrier along the line of

Relative displacement between planet and carrier along the line of

Relative displacement between planet and carrier along the line of

Relative displacement between planet and carrier along the line of

Relative displacement between planet and carrier along the line of

Relative displacement between planet and carrier along the line of

As shown in Figure 1, the carrier of the (i − 1)th stage and the sun gear of the ith stage are joined together by a spline, so are the carrier of the ith stage and the sun gear of the (i + 1)th stage. Rings of those stages are also linked together. The equivalent displacements of members in adjacent stages are

Equations of motion
The equations of motion of the N-stage PGT considering the rotational, translational, and axial displacements are derived by the Newton’s second law and the Theorem of Moment of Momentum. Dynamic equations of the first, last, and the ith (1 < i < N) stage should be derived respectively. The dynamic equations of motion are listed as follows.
Equations of motion for carrier in stage 1

Equations of motion for ring gear in stage 2

Equations of motion for sun gear in stage 1

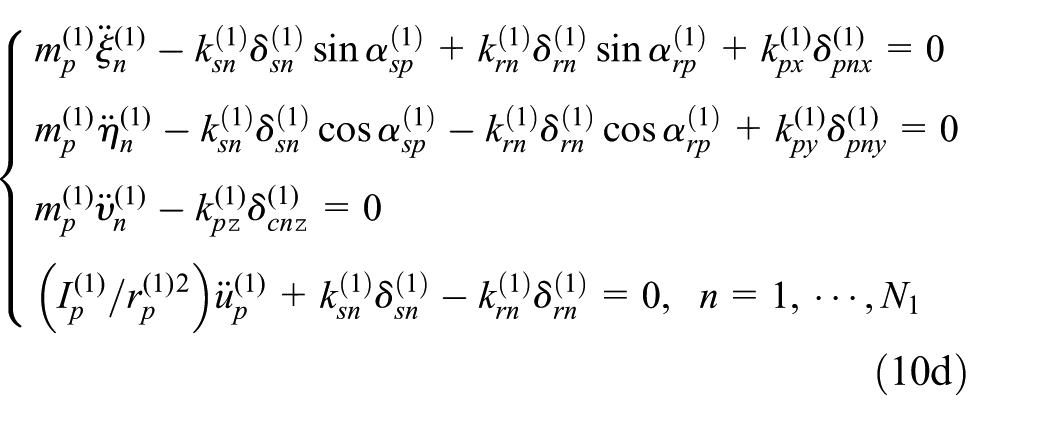
Equations of motion for planets in stage 1
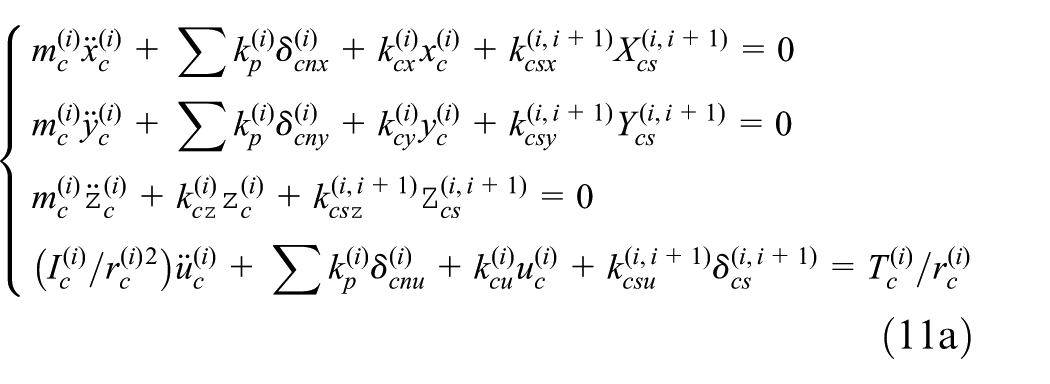
Dynamic equations for carrier of the ith (1 < i < N)-stage planetary gear
Dynamic equations for ring gear of the ith (1 < i < N)-stage planetary gear

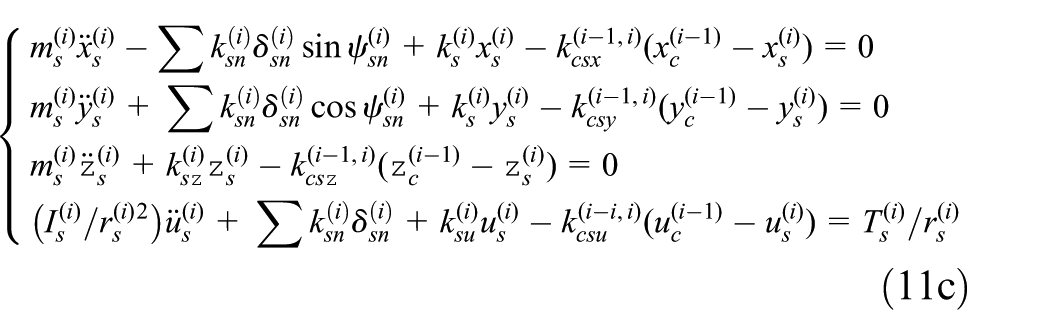
Dynamic equations for sun gear of the ith (1 < i < N)-stage planetary gear
Dynamic equations for planets of the ith (1 < i < N)-stage planetary gear

Dynamic equations for carrier of stage N
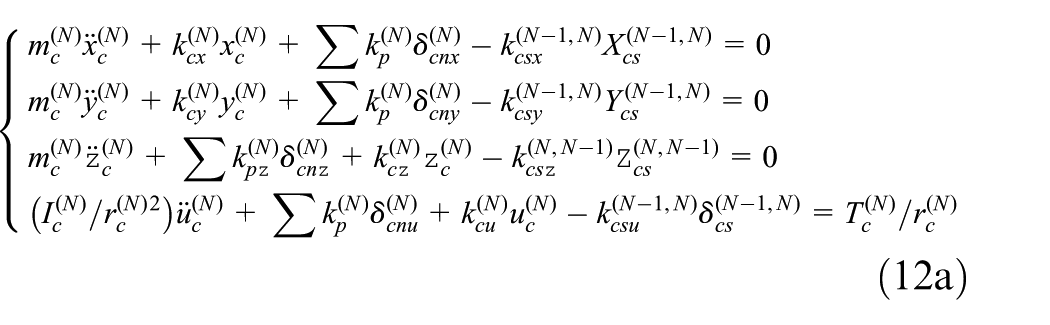
Dynamic equations for ring gear of stage N

Dynamic equations for sun gear of stage N

Dynamic equations for planets of stage N

Assembling the dynamic equations in matrix form yields

where
Natural frequencies and vibration modes
Lin and Parker12,13 investigated the natural frequency spectra and vibration modes of systems with equally spaced and diametrically opposed planets. The natural frequencies and vibration modes of the general multi-stage power-split planetary gear are also obtained by solving the eigenvalue problem governed by equation (13). The corresponding characteristic equation is

where ωi is the natural frequency and
Parameters of the example system.

Natural frequencies and modal vectors are calculated by solving equation (14). The natural modes are grouped according to the multiplicity of the natural frequencies. To further predict the modal properties, systems with N = 2–6 are investigated here. The results show that mode types of the N-stage PGTs can be classified into N + 2 groups: the overall axial translational–rotational mode, the overall radical translational mode, and the ith-stage planet mode (Ni > 3). Several characteristics are revealed when a deep comparison is made on the natural frequencies and modal vectors.
There are 10 × N natural frequencies with multiplicity m = 1 for the N-stage PGTs. Related vibration modes are the overall axial translational–rotational mode in which carriers, rings, and suns of all stages have axial translational–rotational motions. Simultaneously, the central members have no deflections in-plane. Besides, planets in the same stage have identical motions
There are 7 × N pairs of overall radical translational mode with natural frequency multiplicity 2 for the N-stage PGTs. These vibration modes are characterized by the radical translations of the central members of all stages, and the axial deflections of central members are zero. Planets have both radical and axial motions, and deflections of planets in the same stage are different. Figure 4 illustrates the typical overall radical translational mode of the two-stage system with N1 = 3, N2 = 4.
Four natural frequencies with multiplicity m =
Ten overall axial translational–rotational modes, seven pairs of overall radical translational modes, and four (n + 1)th-stage planet modes are added when the system is extended from n stage to n + 1 stages (Nn+1 > 3).

Typical overall radical translational mode of the system with N1 = 3, N2 = 4, and ω = 4262.7 Hz: (a) stage 1 and (b) stage 2.

Typical overall radical translational mode of the system with N1 = 3, N2 = 4, and ω = 3475.2 Hz: (a) stage 1 and (b) stage 2.

Typical second-stage planet mode of the system with N1 = 3, N2 = 4, and ω = 3295.6 Hz: (a) stage 1 and (b) stage 2.
Interstage coupling stiffness influence on modal properties
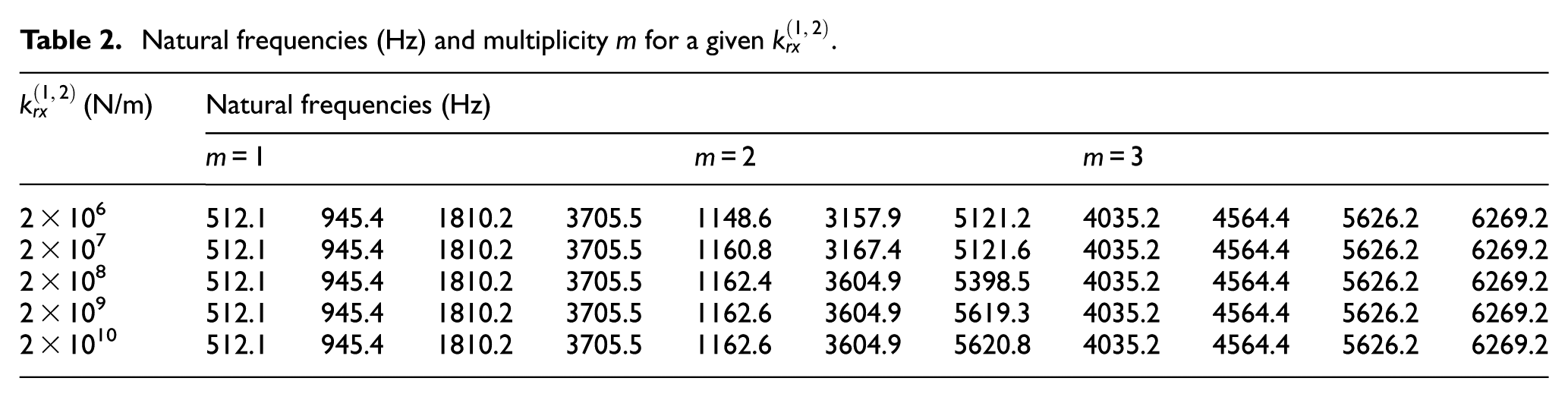
It can be concluded that the modal characteristic is affected by the coupling stiffness from equation (14). To further detect the influence of interstage coupling stiffness on modal properties, the two-stage PGTs with N1 = 3 and N2 = 6 are investigated. The interstage coupling stiffness can be grouped into three classes: the radical, axial, and twist coupling stiffness.
Natural frequencies of the example system and their multiplicities with different radical interstage coupling stiffness
Natural frequencies (Hz) and multiplicity m for a given
The influence of axial and twist interstage coupling stiffness on modal characteristic is also investigated. Natural frequencies and their multiplicities with different axial coupling stiffness
Natural frequencies (Hz) and multiplicity, m, for a given

Natural frequencies (Hz) and multiplicity, m, for a given

Besides, the natural characteristics are also numerically simulated when
Consequently, it can be concluded that the interstage coupling stiffness affect the natural frequencies rather than mode types in the multi-stage PGTs. Both the twist and the axial interstage coupling stiffness,
Conclusion
A dynamic model of an N-stage planetary gear set considering three-dimensional translation and axial rotation is developed to study the free vibration characteristics of multi-stage power-split systems. To describe the modal properties of the whole system accurately, the relative displacements of members of same stage and adjacent stages are all analyzed. Subsequently, the dynamic equations of motion of any stage are derived. Natural frequencies and vibration modes are obtained by solving the eigenvalue problem governed by corresponding equations. Furthermore, the influence of interstage coupling stiffness on modal properties is numerically simulated.
From the results of modal characteristic analyses, the vibration modes of the N-stage PGTs are categorized as N + 2 groups: the overall axial translational–rotational mode, the overall radical translational mode, and the ith-stage planet mode (Ni > 3). Corresponding modal properties are summarized. Both the twist and the axial interstage coupling stiffness have an impact on the natural frequencies and mode shapes of the overall axial translational–rotational modes. The overall radical translational modes are substantially dependent on the radical interstage coupling stiffness. The ith-stage planet mode is immune to the variation of coupling stiffness. There is an increasing tendency of the natural frequency on the whole as the coupling stiffness increases. Compared with the previous translational–rotational model, the axial translation of members is added to the dynamic model to investigate the modal properties of the multi-stage spur planetary gears. The results of this article also validate the necessity of considering axial deformations in dynamic modeling. Those investigations lay a good foundation of dynamic response analysis of multi-stage PGTs.
Our ongoing research will focus on the investigations of the analytical solutions of the multi-stage PGTs and the influence of interstage coupling stiffness on the system dynamic response.
Footnotes
Academic Editor: Yangmin Li
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This project was supported by the National Natural Science Foundation of China (no. 51175299).