
Abstract
In this article, the lag exponential synchronization for a class of neural networks with distributed delays and discrete delays (mixed delays) and its application on mechatronics systems are studied via adaptive semi-periodically intermittent control. Using the adaptive control theory and the Lyapunov stability theory combined with the method of intermittent control, a simple but robust adaptive semi-periodically intermittent controller and impulse controller are designed. Via the proposed control methods, the response system can lag-synchronize with the drive system, and the less conservative results are obtained. In the original references, the control width should be larger than the time delay and the time delay should be smaller than the noncontrol width. While in this article these strict assumptions can be removed. Moreover, the control time and the control rate may not be constants. This leads to a larger application scope for our method. Finally, numerical simulations about practical mechatronics systems are exploited to show the effectiveness of the results.
Keywords
Introduction
In 1983, the competitive neural networks (CNNs) were proposed by Cohen and Grossberg. 1 Afterward, there was a great development in neural networks (NNs). Meyer-Base et al.2–4 presented the CNNs with different time scales in previous studies, which can be regarded as the extensions of primitive neuronal competition.1,5 In the past few years, the NNs have been extensively investigated across many fields of science and engineering since they have been widely applied in associative memories, signal and image processing, mechatronics control, and combinatorial optimization.6–10
The model of NNs is a computational model or mathematical model based on biological neural systems. The NNs consist of a lot of artificial interconnected neurons and process information using a connectional approach. The NNs have represented an alternative method to solve the problems in control engineering via control technique. The most useful property of control NNs is their ability to approximate arbitrary nonlinear or linear mapping through learning. Since the early 1990s, there has been more and more interest in using NNs for control of complex systems, such as robotics, electrical power system, and mechatronics systems. Many control NNs have been developed for the compensation for the effects of nonlinearities and system uncertainties in control systems. Therefore, system performance of the robustness and stability can be improved. 11
Mechatronics is the synergetic integration of mechanical engineering with electronics and intelligent computer control in the design and manufacturing of industrial products and processes. 12 In many cases, the mechanical part of the system is coupled with the electrical, thermodynamical, chemical, or information processing part. Multiple input, multiple output (MIMO), nonlinear, and coupling are the basic characteristics of modern complex mechatronics systems. The current mechatronics systems not only need high performance but also have many intelligent functions. They have knowledge processing function of simulation, extension, and expansion intelligent behavior. Mathematical models can be established for some function modules, which are controlled via classical control theory. But there are many portions which cannot be modeled. And the information is mostly fuzzy. Then we can achieve results using the idea of intelligent control, such as expert control, fuzzy control, and NN control, which the classical control method cannot achieve. Using fuzzy control algorithm can not only improve the dynamic response speed and static performance of the system but also it has good anti-interference ability. But there is a buffeting problem, and it has certain deficiencies in self-organization, self-learning ability. Many applications of NNs are powerful tools for the controllers’ design for mechatronics systems. The artificial neural network (ANN) can solve these problems very well. ANN can be used to realize the fault diagnosis and the interpolation of mechatronics systems. The adaptive neuron is used to realize the gain control of software of mechatronics systems. Using the NN to adjust the error and error rate of the system on-line, the effect of fuzzy control can be greatly improved. The fuzzy controller is adaptive, self-organized, and retains its robustness.11–13
Synchronization is one of the most significant dynamical behaviors in NNs.6–10,14–24 Many synchronization phenomena are very useful for us, such as the synchronous transfer of digital and analog signals in communication networksl. 17 In fact, synchronization is a well-established concept and it is typical in the basic motions of nature. Many control techniques, such as linear feedback control,9,14–16 adaptive feedback control,8,17–19 impulsive control, 20 pinning control,21–26 and intermittent control26–30 have been developed to drive the synchronization of networks. The intermittent control is one useful control method in engineering fields. The approach of the intermittent control is implemented easily in practice. In Yu et al., 24 intermittent control has been first introduced to control synchronization of complex network systems. But two restrictive conditions about the control width, the time delays, and the noncontrol width are imposed. From then on, lots of interesting results have been presented for synchronization of complex dynamic networks by periodical intermittent control in previous studies.25–30 In Cai et al., 26 the problem of robust synchronization about the NNs with uncertain parameters and mixed delays was investigated. A novel controller is designed to pin the coupled networks to reach the synchronization state. In Zheng and Cao, 27 the lag exponential synchronization for a class of NNs with mixed delays is studied by intermittent control. The results of Li and Cao 29 removed the conservative assumptions on control width and time delays mentioned in Yu et al. 24 The control time and the control rate were constants in most of the previous results. In Li et al., 30 the synchronization problem via semi-periodically intermittent control technique and mode-dependent average dwell time method has been researched for switched complex networks with delayed coupling. The controllers which were aperiodically intermittent extended the existing results of periodically intermittent control. Unluckily, the linear intermittent control gain which has been obtained may be much larger than the actual needs. Therefore, the study of the semi-periodically intermittent control needs further exploration and improvement.
It is well known that there inevitably exists time delay when the signal travels through the complex NNs due to the finite speeds of transmission and spreading. Time delay is likely to cause undesirable dynamical behavior, for example, oscillation, chaos, and instability. Therefore, we often require to synchronize between one NN and the other NNs at a constant time delay. Compared with complete synchronization,8,27 lag synchronization may be a more appropriate technique to clearly indicate the fragile nature of neuron systems. Hence, it is one of the important problems to effectively lag-synchronize two chaotic NNs for potentially theoretical research and practical application.
For all the above reasons, this article aims to handle the problem of lag synchronization for the NNs with mixed delays via adaptive semi-periodically intermittent control. Using the theory of Lyapunov stability combined with adaptive control and intermittent control techniques, improved adaptive semi-periodically intermittent lag synchronization controllers which are little costly and more useful in practice are proposed. In Yang et al. 8 and Yu et al., 24 the control width is supposed to be larger than the time delay and the time delay is supposed to be smaller than the noncontrol width. While in this article these two restrictive assumptions are not required. And the control gain which is obtained is smaller than in Li et al. 30 Moreover, the control time and the control rate may not be constants. The novel adaptive semi-periodically intermittent controllers and impulse controllers are designed, which can be testified to be less conservative compared with linear intermittent control. Numerical examples are presented to show the effectiveness of the obtained method.
The rest of this article is organized as follows. The NNs’ model with mixed delays, some necessary assumptions, and lemmas are given in section “NNs’ model and preliminaries.” In section “Main results,” lag synchronization controllers of NNs with mixed delays via adaptive semi-periodically intermittent control and impulse control are designed, respectively. The numerical simulations are given to illustrate the results in section “Numerical simulation.” The conclusions are obtained in section “Conclusion”.
NNs’ model and preliminaries
We consider the mixed delays NNs as follows
where
Let

The initial value of equation (2) is denoted by
On account of the drive-response synchronization, let us take equation (2) as the drive system. Then we design the response system as follows

where
Definition 1
Drive-response NNs (2) and (3) are said to achieve exponential lag synchronization if there exist

for any
To research the lag synchronization (equations (2) and (3)) with lag time

where
In the following, some necessary definitions and assumptions and lemmas are given.
Assumption 1
(A1) There exist positive constants

Lemma 1
For any vectors

If not specified otherwise, inequality
Lemma 2
For any constant symmetric matrix

Main results
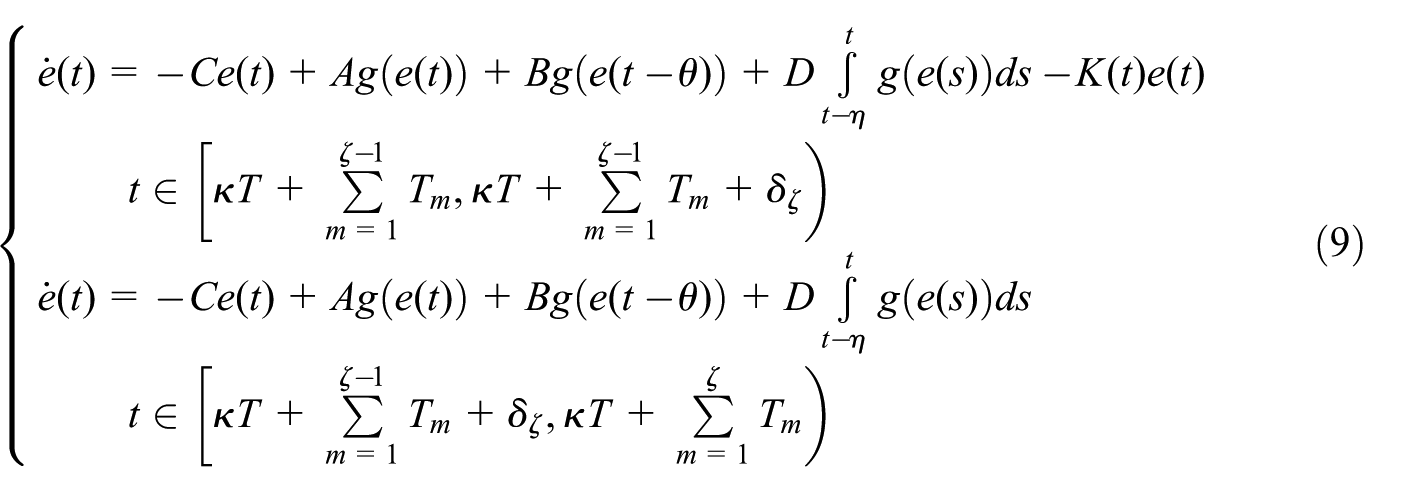
In this section, the adaptive semi-periodically intermittent control which is added to the NNs with mixed delays (3) such that states of equation (3) can be exponentially lag-synchronized with equation (2) is designed. At the same time, the trivial solution of error system (5) is exponentially stable. To realize lag synchronization of the NNs with mixed delays by adaptive semi-periodically intermittent control, the controllers are added to the nodes of the NNs. In error system (5), the adaptive semi-periodically intermittent controllers are defined as follows

and the corresponding updating laws

where
We assume that there exists constant
Let
Now we give lag synchronization criteria under the adaptive semi-periodically intermittent controller in NNs with mixed delays.
Theorem 1
Suppose Assumption 1 holds. The NNs with mixed delays (2) and (3) globally exponentially lag-synchronize under adaptive semi-periodical intermittent controllers (7) and (8) if there exist positive constants

where
Proof
First, we introduce a new Lyapunov–Krasovskii functional

where k is an undetermined sufficiently large positive constant. Calculating the derivative of equation (11) along the trajectories of error system (9) under Assumption 1, we get the following.
When

From Lemma 1 and Assumption 1, we obtain
and

where

Substituting equations (13)–(15) into equation (12) gives

where

So we have

Similarly, when

Take

Then we want to prove that

If equation (21) does hold, there should exist a


Using equations (20), (22), and (23), we obtain
The second inequality in equation (22) contradicts equation (24), then equation (21) holds.
We want to prove that


For

and if

Hence, for

Then

The second inequality in equation (25) contradicts equation (28), so

Then for

So

Let
By following a similar proof above, we can obtain that for any

Let

Let

From the condition in equation (10), the states of error system (9) are globally exponentially stable, that is, the NNs with mixed delays (3) globally exponentially synchronize with system (2) under adaptive semi-periodically intermittent controllers (7) and (8). This ends the proof.
Remark 1
Compared with Yu et al. 24 and Zheng and Cao, 27 Theorem 1 does not need some unnecessary restrictions about control rate and control period. This leads to a larger application scope for our method. Moreover, our results have been more adaptive and robust than Li et al. 30
Remark 2
Especially, when

The general mixed delay NN (3) becomes the impulsive delay NN (33)

and
Applying the method similar to Theorem 1, the impulsive synchronization control criterion of impulsive delay NN (33) can be obtained as follows.
Corollary 1
Under impulsive controller (32), if Assumption 1 holds, and there exist positive constants

where
Numerical simulation
In this section, numerical examples are given to illustrate that our analytical results are valid for exponential lag synchronization.
Example 1
The chaotic NN with mixed delay drive system is given by

where
Figure 1 is the numerical simulation of system (35), which shows that system (35) has a chaotic attractor. Next, the response system is described by

Chaotic trajectory of model (35).
The parameters
In this simulation, the values of the parameters are taken as

Lag synchronization of
Example 2
Consider a delayed mechatronics system as the node dynamical system. It is composed of an electrical part (NNs’ oscillator) coupled to a mechanical part governed by a linear oscillator. The coupling between both parts is realized through the electromagnetic force due to a permanent magnet. It creates a Laplace force in the mechanical part and the Lenz electromotive voltage in the electrical part. The electrical part of the system consists of a resistor R, an inductor L, a condenser C, and a sinusoidal voltage source e(t) all connected in series. The mechanical part is composed of a mobile beam which can move along the

where

The individual coupling matrix is
The quantity

Comparison of linear intermittent control and adaptive semi-periodically intermittent control qualities
Conclusion
Lag synchronization of a class of NNs with discrete delays and distributed delays with adaptive semi-periodically intermittent control is investigated in this article. Based on the stability theory, combined with semi-periodically intermittent control method, the technique of adaptive control and some general criteria for ensuring NNs with mixed delay lag synchronization have been derived. The corresponding adaptive semi-periodically intermittent feedback synchronization controllers and impulse synchronization controllers are designed. The results obtained can be used in the mechatronics systems. Moreover, our results are rather general and less conservative. In this article, we introduce the notation of adaptive semi-periodically intermittent control, which removes the strict assumptions on control width and time delays. The conclusions in this article enhance and generalize the previous results. Finally, an illustrative example is presented to show the feasibility and effectiveness of the presented method.
Footnotes
Academic Editor: Zheng Chen
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partially supported by the National Natural Science Foundation of China (grant no. 61673100), the National Natural Science Foundation of Liaoning Province (grant no. 2017020636, 2017020637), Liaoning BaiQianWan Talents Program (grant no. 2017076), the Fundamental Research Funds for the Central Universities (grant no. N140504009), and Discipline Content Education Project of Shenyang Jianzhu University (grant no. XKHY2-104).