
Abstract
Vehicle fuel consumption is greatly influenced by roadway gradients and the driver’s driving behavior. To explore the great energy-saving potential of optimizing driver behavior on hilly roads, a novel eco-driving algorithm is defined and formulated based on dynamic programming. The new dynamic programming–based eco-driving algorithm generates the optimal velocity trajectory using information on the roadway gradients, vehicle longitudinal dynamics, and vehicle transient fuel consumption characteristics. A newer and accurater instantaneous fuel consumption model is developed and used in the objective function to ensure fuel economy driving. To verify the performance of the proposed dynamic programming–based eco-driving algorithm, co-simulations of MATLAB/Simulink and CarSim on typical roads and a real road are conducted. A typical cruise control algorithm that consists of two proportional–integral controllers is used as a comparison group. The simulation results show that approximately 6.89%–24.78% of fuel can be saved using the dynamic programming–based eco-driving algorithm compared with using the cruise control algorithm.
Introduction
Fuel economy improvement has become an ecological and economic challenge for the whole world due to the increasing demand for fuel and the rising focus on environmental protection. Eco-driving systems are emerging as an effective tool for improving fuel economy in both the short- and long-term. Eco-driving systems can lower the fuel consumption by optimizing a driver’s driving behavior and encouraging drivers to drive in an energy-efficient manner.
Fuel economy is greatly affected by a driver’s behavior. Studies have shown that approximately 4.35%–25.00% of fuel can be saved by a driver following an eco-driving system.1–8 The roadway gradient also has a significant impact on vehicle fuel economy. The fuel economy on flat routes can be 5% to 20% superior to that of hilly routes.4,9,10 To explore this great fuel-saving potential, an eco-driving mission that utilizes the changing roadway gradient information will be studied. The optimal velocity trajectories across hilly roads will be presented to improve the vehicle fuel economy.
The first attempt to compute the optimal velocity trajectories for fuel economy was performed by Schwarzkopf and Leipnik. 11 The explicit solutions for constant road slopes were obtained by combining the maximum principle with a nonlinear vehicle model. A similar problem was also studied by Chang and Morlok, 12 with results showing that a constant speed is optimal on a constant road slope within certain bounds on the slope. Hellström, Fröberg, and Nielsen developed an on-board look-ahead controller that utilizes information about the road topography ahead of heavy trucks based on dynamic programming (DP). The experimental results showed that a fuel consumption reduction in approximately 3.5% can be obtained without an increase in trip time. 6 An eco-driving system using model predictive control (MPC) was developed by Kamal et al. based on information on the roadway gradient, a model of the vehicle dynamics, and the engine fuel consumption characteristics. 4 A fuel optimal control problem for a light vehicle was defined and solved by Luu et al. 13 based on DP. Similarly, Wang et al. 1 optimized the fuel consumption of the up and downslopes using global and local optimization. The eco speed profile was obtained using a co-simulation of MATLAB/Simulink and CarSim, and a fuel reduction in 5.5% was obtained. However, most fuel consumption models they use are derived from steady-state conditions. The prediction accuracy of the fuel consumption models needs to be improved to better evaluate eco-driving algorithms. Therefore, a newer and more accurate instantaneous fuel consumption model is developed, and an eco-driving problem is defined here using this instantaneous fuel consumption model and the vehicle longitudinal dynamics to optimize the fuel consumption of passenger cars running on hilly roads. The optimal velocity is then calculated using discrete DP.
The rest of this article is organized in the following way: the fundamental concept and key techniques of eco-driving for running on hilly roads are introduced in section “Eco-driving on hilly roads”; a new instantaneous fuel consumption model that is used to compute objective function values is presented in section “Instantaneous fuel consumption model”; the DP-based eco-driving problem formulation is presented and solved in section “Dynamic programming algorithm”; and the fuel-saving potential of the DP-based eco-driving algorithm is validated through the co-simulation of MATLAB/Simulink and CarSim in section “Simulation results.” Finally, this article ends with some conclusions.
Eco-driving on hilly roads
The fundamental concept of eco-driving on hilly roads is shown in Figure 1. As observed, an eco-driving system on a free roadway containing up and downslopes consists of three key technologies, namely, the vehicle longitudinal dynamics, an instantaneous fuel consumption model, and roadway gradient information. The vehicle longitudinal dynamics are used to simulate the vehicle longitudinal motion; the instantaneous fuel consumption model can precisely predict the vehicle fuel consumption and will be used to calculate the object function values of the DP-based eco-driving algorithm; the roadway gradient information is provided by a three-dimensional (3D) digital map, which is not the main objective here. Thus, the assumption is that the roadway gradient information is already known and will be regularly sent to the eco-driving algorithm. The DP-based eco-driving algorithm proposed here takes full advantage of the three key technologies and generates the optimal vehicle speed trajectories that minimize the fuel economy over the entire journey.

Fundamental concept of DP-based eco-driving on hilly roads.
Instantaneous fuel consumption model
The instantaneous fuel consumption model has emerged as an effective tool to help to develop and assess eco-driving technologies. To better predict fuel consumption and help solve the DP-based eco-driving problem, a new instantaneous fuel consumption model called Beijing Institute of Technology Transient Fuel Consumption Model (BIT-TFCM) is developed based on dynamometer measurements. This new model is characterized by two sub-modules: a steady-state module whose inputs are the engine speed and torque and a transient correction module whose inputs are the vehicle speed and acceleration. The output of the steady-state module is the logarithm of the steady-state fuel consumption rate, which is a polynomial function of the engine speed and torque. The transient correction module provides a correction based on the prediction of the steady-state module through a polynomial function of the vehicle speed and acceleration. The basic structure of this instantaneous fuel consumption model is given by equation (1)

where
The coefficients of this new model are determined using the measurements of a 2013 Hyundai Sonata within the Urban Dynamometer Driving Schedule (UDDS) and US06 driving cycle (model development group). Then, a model performance validation is conducted using the measurements within the US06 driving cycle (model validation group), and the instantaneous validation results are illustrated in Figure 2.

Validation of BIT-TFCM model.
As seen in Figure 2, the BIT-TFCM model can well capture the changing trends of the measured fuel consumption in both the high- and low-speed fields. It thereby provides a fairly accurate estimation of the real-world fuel consumption rate. Additionally, the calculation speed of the BIT-TFCM model is faster than that of the traditional engine map. Therefore, the BIT-TFCM model is suitable for use in the DP-based eco-driving algorithm.
DP algorithm
Vehicle longitudinal dynamics
The motion of a vehicle running on a free hilly roadway is shown in Figure 3, and the driving wheels’ slip is ignored in this figure.

Force diagram for running on a free hilly roadway.

and the traction force is given as follows

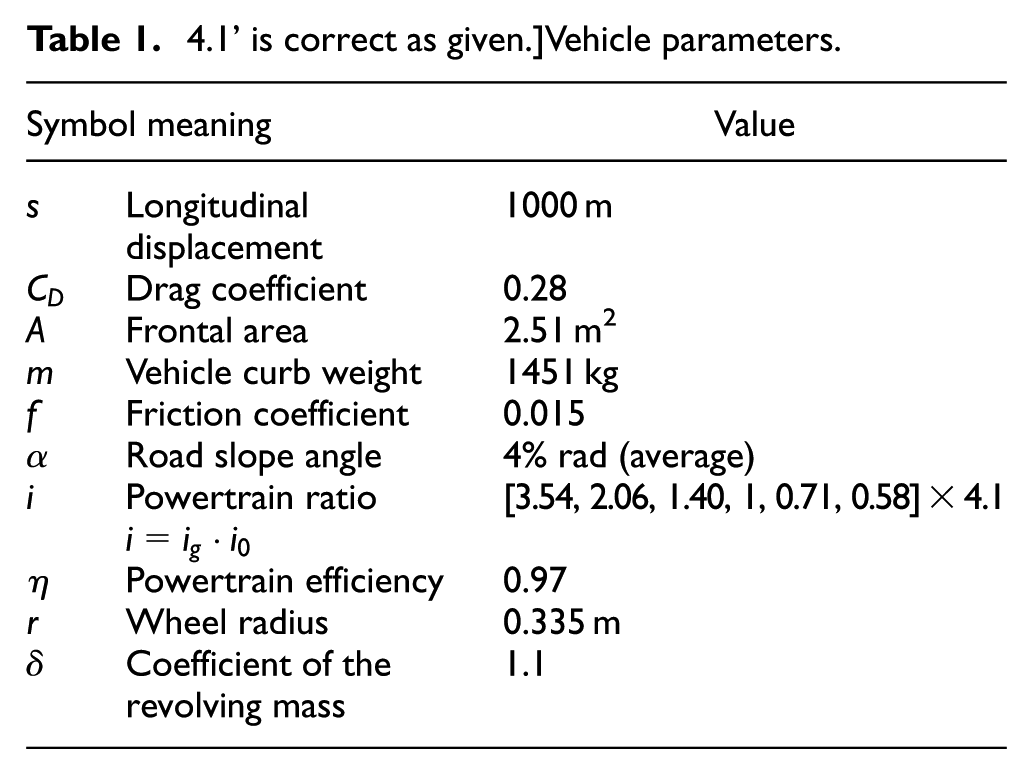
The symbols and their values in above equations are listed in Table 1.
4.1’ is correct as given.]Vehicle parameters.
And then, the time-dependent state equation of the vehicle can be written as follows
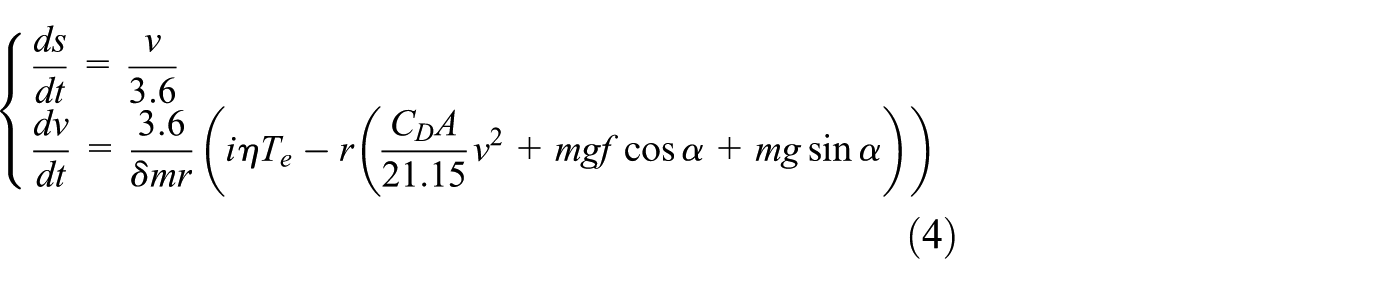
To avoid “the curse of dimensionality” 14 and reduce the computation time, the time-dependent state equation is transformed into a position-dependent state equation using the following conversion

It should be noted that the event of a vehicle stop,

The optimization problem at hand is to be solved numerically by means of DP. Therefore, equation (6) is further discretized through the forward Euler method
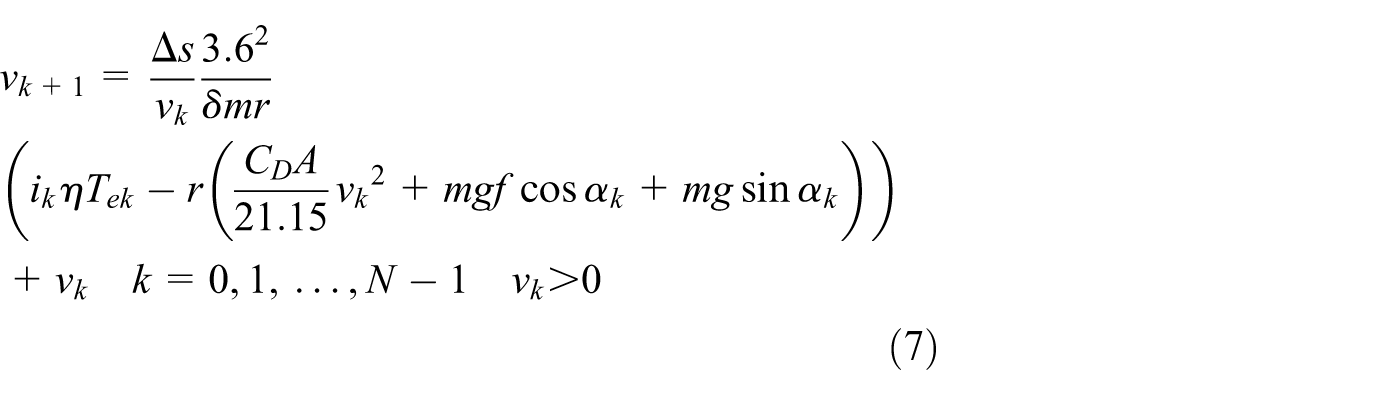
where

where
Objective and constraints
The main objective of the DP-based eco-driving algorithm is to minimize the fuel consumption while running on the hilly roads. The fuel use for a drive mission from

The constraints of the optimization problem include the constraints for speed, acceleration, engine speed, and engine torque. The constraints are mainly fixed by the travel and the vehicle performance. The constraints for speed at any stage are determined by the vehicle dynamic performance and the legal speed for the roadway

Aggressive accelerating may cause an increase in fuel consumption and worsen the ride comfort. On the other hand, travel time may increase if running with only mild acceleration. Thus, constraints for vehicle acceleration at any stage are determined

Similar constraints can be applied for the engine speed and engine torque


The constraints for the engine speed and torque mainly depend on the normal working range of the engine.
DP-based eco-driving algorithm
To summarize, the DP-based eco-driving algorithm that minimizes the vehicle fuel consumption utilizing information on the roadway gradient can be defined as follows

As defined in equation (14), the DP-based eco-driving algorithm takes the vehicle speed
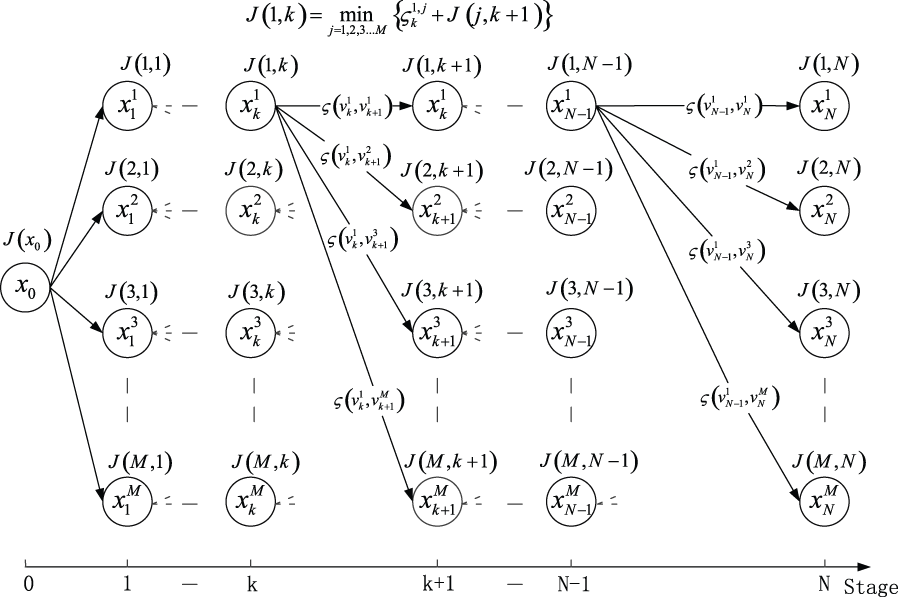
Schematic diagram of the solution of the DP-based eco-driving algorithm.
The travel distance is discretized into

Each state is associated with a total cost

Then, the DP-based eco-driving algorithm can be solved using inverse DP in the following way:
Let
Let
Let

A control action
For
The optimal speed profile is the speed set that minimizes the total fuel consumption
Simulation results
To verify the effectiveness of the DP-based eco-driving algorithm, co-simulations between CarSim and MATLAB/Simulink are conducted. A D-class sedan in CarSim is chosen as the simulation test vehicle. The basic parameters of the vehicle have been modified in accordance with a 2013 Hyundai Sonata. As shown in Table 2, various parameters have a significant impact on the proposed DP-based eco-driving algorithm. Suitable values of these key parameters are determined by calculation and comparison.
Parameters of DP-based eco-driving algorithm.

For the purpose of comparison, the vehicle is also separately driven by a cruise control algorithm. The cruise control algorithm is made up of two proportional–integral (PI) controllers, one for the accelerate signal and the other for the brake signal. As long as the accelerator controller is active, the integrator state of the brake controller will shut down and vice versa. With


w>here
The eco-speed on a flat road is set as the objective speed of the cruising control algorithm. Two types of simulation are performed. First, the DP-based eco-driving algorithm is verified on typical artificial roads, including a simple upslope, a simple downslope, and an up–downslope. Then, a simulation is conducted on a real road of 10 km using the roadway gradient information from the digital map.
Figure 5(a) and (b) shows the simulation results on typical artificial roads with a simple upslope and a simple downslope, respectively. To make it simple, “C-Control” is used to represent the vehicle driven by the cruise control algorithm, and “DP-Eco” is used to represent the vehicle driven by the DP-based eco-driving algorithm. In the case of the simple upslope, the C-Control vehicle consumes 94.9016 cc of fuel, while the DP-Eco vehicle consumes 88.3629 cc of fuel, which means that approximately 6.89% of fuel is saved by the DP-Eco vehicle compared with the C-Control vehicle. This efficiency is achieved by gently accelerating before entering an upslope. In the case of the simple downslope, the C-Control vehicle consumes 23.3832 cc of fuel, and 17.5891 cc of fuel is consumed by the DP-Eco vehicle. Approximately, 24.78% of fuel is saved by the DP-Eco vehicle. This great energy-saving potential is achieved by slowing down before entering a downslope and taking advantage of gravity to accelerate during the downslope.
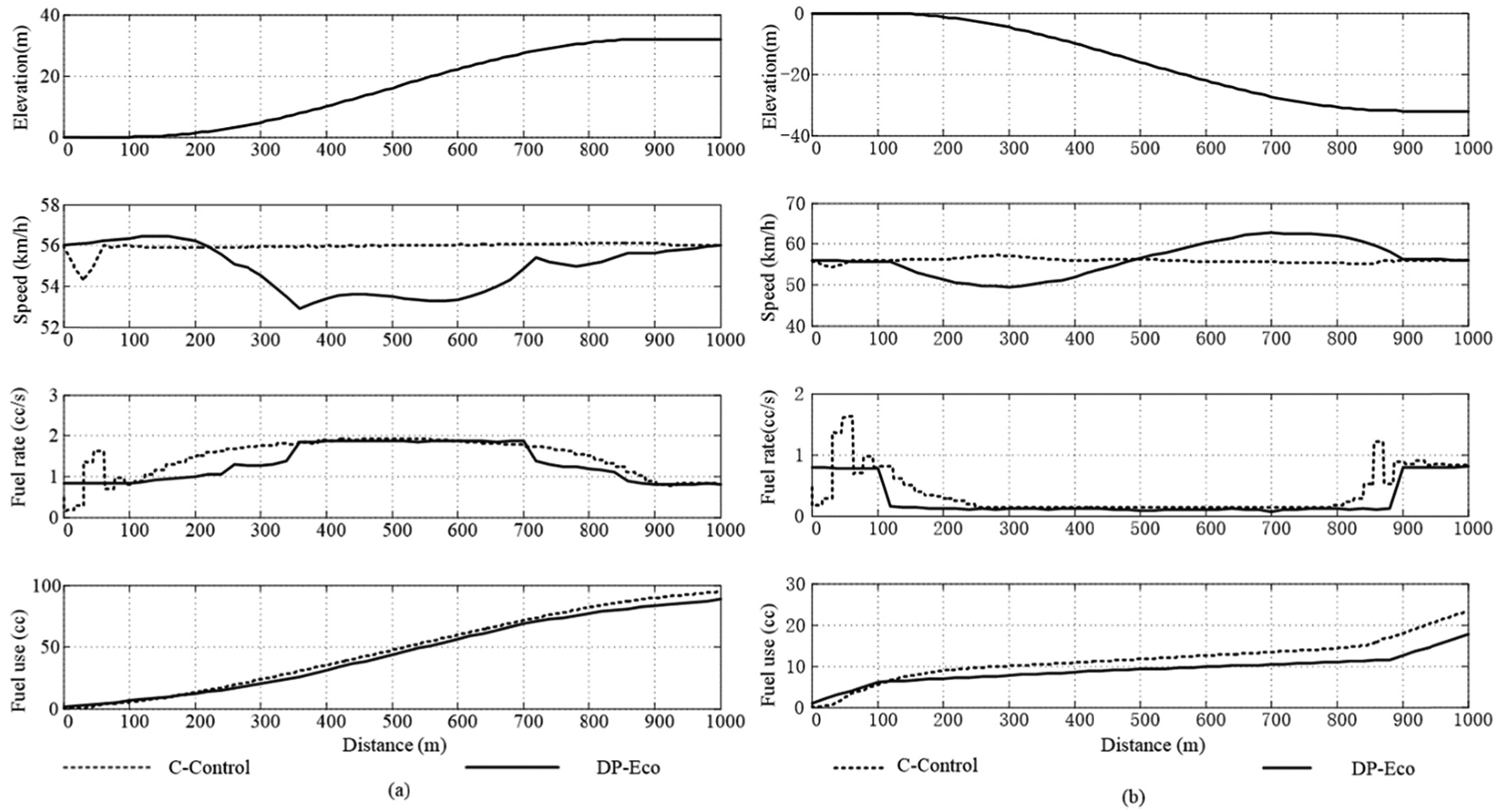
Comparisons between the DP-Eco and C-Control vehicles: (a) simple upslope and (b) simple downslope.
To further verify the performance of the DP-based eco-driving algorithm, a simulation on a typical artificial road with both up and downslopes is also conducted. The simulation result is given in Figure 6. Approximately, 71.9982 and 59.2256 cc of fuel are consumed by the C-Control vehicle and the DP-Eco vehicle, respectively. A fuel reduction in approximately 17.74% is achieved by the DP-Eco vehicle. Similarly, the DP-Eco vehicle accelerates before entering an upslope and takes advantage of gravity to accelerate during a downslope.

Simulation on the road with up and downslopes.
Finally, the performance of the DP-based eco-driving algorithm is validated on a real road. As shown in Figure 7, a road stretch of 10 km that is located in the No. 84 Highway of Marksuhl, Germany is selected as the test route. The roadway information is derived from Cycleroute 15 and rebuilt in CarSim. As illustrated in Figure 7, the altitude of the test route is higher than 250 m along most of the length, and the roadway gradients range from −10% to 10%. Figure 8 shows the simulation results for running on the test route from Point A to Point B. The C-Control vehicle consumes 651.8758 cc of fuel, and the DP-Eco vehicle consumes 512.7881 cc of fuel. Approximately, 21.34% of fuel is saved by the DP-Eco vehicle.

Real test road and its information.
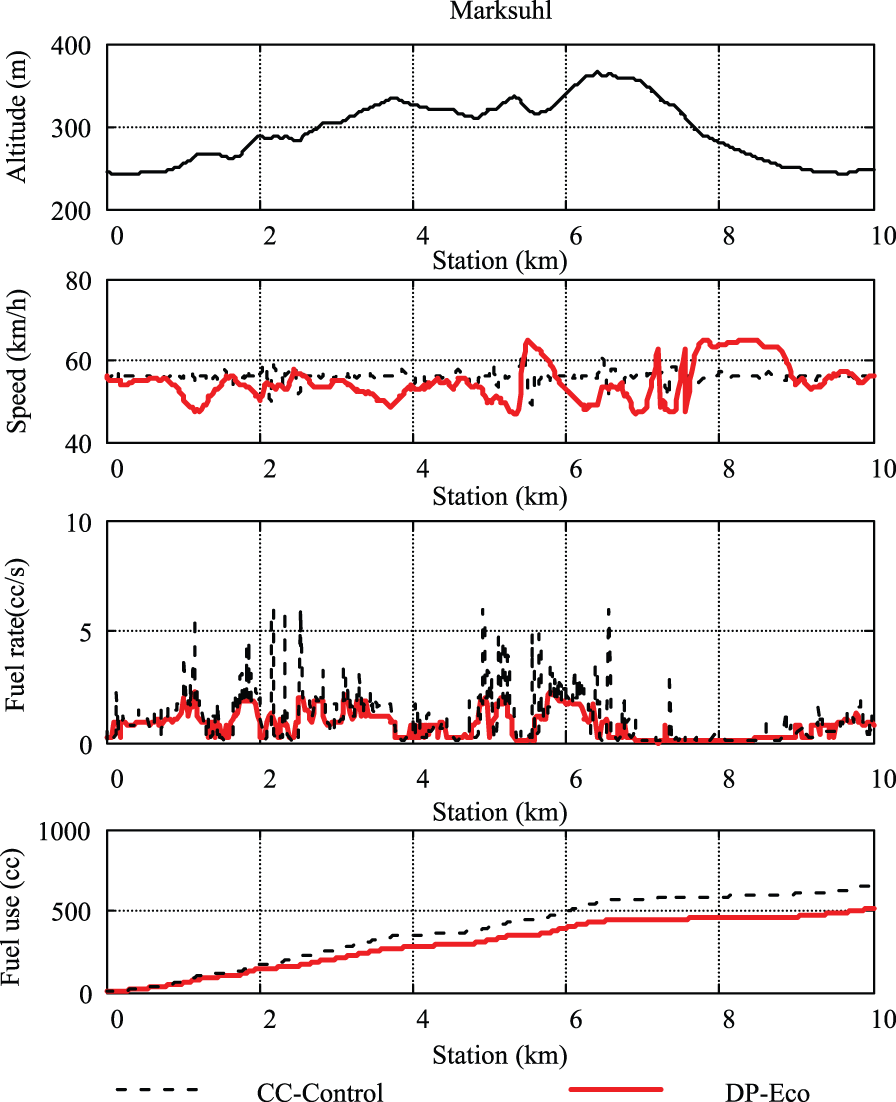
Simulation on the test route from Point A to Point B.
Conclusion
A novel DP-based eco-driving algorithm that utilizes roadway gradient information ahead of the vehicle to minimize fuel consumption is developed. The DP-based eco-driving algorithm adopts a newer and more accurate instantaneous fuel consumption model to calculate the object function values and uses the vehicle longitudinal dynamics to determine the vehicle longitudinal motion. The optimal velocity trajectory is calculated through DP based on the new instantaneous fuel consumption model, vehicle longitudinal dynamics, and information on the roadway gradients. The computation time was reduced by transforming the time-dependent system state equations into position-dependent ones.
The co-simulation of MATLAB/Simulink and CarSim shows that the proposed DP-based eco-driving algorithm can save fuel use by speeding up in advance before entering an uphill and by slowing down before entering a downhill and taking full use of the downslope during a downhill. Its energy-saving potential can reach up to 6.89%–24.78% depending on different application scenarios.
The proposed DP-based eco-driving algorithm can be used in a driver assistance system or an intelligent driving system. However, only the fuel economy of a single vehicle running on hilly roads was optimized this time. Interactions with other vehicles and traffic signals should also be incorporated, and the compromise between the travel time, ride comfort, and driving safety should be included in the future research.
Footnotes
Academic Editor: Xiaobei Jiang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant no. 51375053).