
Abstract
Focusing on exploring optimal control method of high-speed train, this research explicitly introduces a fuzzy predictive control framework to enhance safety, comfort, and energy-efficiency. The dynamic equation of the high-speed train is modeled as a cascade of cars connected by spring-like couplers and then represented by Takagi–Sugeno fuzzy model. Based on model predictive control approach, an effort is made on the design of fuzzy predictive controller such that each car tracks the target speed, and every coupler is stabilized to the equilibrium state as well as optimizing the performance function value at every time instant with regard to accelerating and braking constraints. Sufficient conditions for the existence of corresponding controller optimization problem are given in a set of linear matrix inequalities. Some simulations are performed to show the effectiveness of the model and the algorithm.
Introduction
Background and literature review
Since the world’s first high-speed railway, Japan Tokaido Shinkansen, was put into commercial operation in 1964, high-speed railway systems have attracted much attention as they can provide greater transport capacity, significantly faster speeds, and outstanding features of punctuality when compared to aircraft and auto vehicle. Nowadays, high-speed railways have gone through a rapid development in Europe, Russia, Japan, China, and many other developing countries. As the high-speed railway networks are becoming more and more complex, many new challenging technical and commercial issues such as reduction of energy consumption, safety, and comfort have been brought up. With the breakthrough in computer control and communication technology, the automatic train control (ATC) system is equipped to automatically supervise the train speed to follow a desired trajectory which also makes it possible to operate the train in a safe, energy-efficient, and comfortable way.1–3
As shown in the literature, the dynamic models of the high-speed train can be divided into two categories: the single-mass point model and the cascade mass point model. Some researchers modeled the whole train as a single point mass and applied the Pontryagin maximum principle to prove that the optimal sequence of train driving strategy should consist of four phases including maximum acceleration, cruising, coasting, and maximum braking.4–6 Moreover, various algorithms were proposed to determine the optimal switching strategy among different phases considering the real-world operation environments such as track gradient and speed limits, commercial punctuality constraints, and the uncertainty of some performance parameters.7–9
Although the single-mass-point model makes the controller design much convenient, it overlooks the in-train dynamics which play essential roles when considering the operation safety for a long train. Research based on the cascade-mass-point model, therefore, has become a new trend in recent years. Gruber and Bayoumi
10
investigated the longitudinal dynamics of multi-locomotive powered train and approximated it as a nonlinear mass–spring dashpot model which was interconnected via couplers at the first time. They demonstrated that this method could efficiently minimize the coupler forces which resulted in safer operation and increased traveling speeds. With the cascade-mass-point model, Zhuan and Xia
11
proposed an optimal open-loop controller approach and employed the Lagrange multiplier method to minimize the coupler forces between connected cars. With the similar model as Zhuan and Xia,
11
Chou and Xia
12
introduced a linear quadratic regulation algorithm to optimize in-train forces as well as energy consumption. Yang and Sun
13
extended the cascade-mass-point model to describe the dynamic features of high-speed train, and they formulated a mixed
The cascade-mass-point model is believed to be much more accurate than the single-mass one; it thus imposes a higher computational complexity in solving the optimization problem. Besides, as the practical train model is nonlinear, scholars insist on finding possible methods to simplify the cascade mass point model while maintaining its merits and advantages. Most researchers choose to linearize the dynamical model to facilitate the controller design by which way some vital factors may be ignored and certain operational constraints are not concerned.14–16 However, with the increasing train speed, the deviations caused by linearization become more and more significant so that it should be carefully contemplated in control design. With development of the fuzzy logic control in recent decades,17,18 a lot of researchers begin to take the fuzzy control methods and optimization techniques as alternatives to control problems associated with high-speed train.19–21
Proposed approach
As shown in the literature, the majority of studies mainly investigate the optimal high-speed train control according to the current information, and future behaviors during the whole travel are usually not taken into consideration. Therefore, these approaches cannot accomplish an overall optimization for the high-speed train movement due to the uncertainty during a long trip. Since model predictive control (MPC) approach is computed repeatedly under certain cost function, this method can adapt to unfavorable factors such as model inaccuracies, operation constraints, and unanticipated changes in system parameters.22–26 Moreover, it has been proved that Takagi–Sugeno (T-S) fuzzy models can approximate any smooth nonlinear system to any accuracy within a compact set.27,28 Therefore, this characteristic makes it suitable for dealing with the deviations caused by just linearizing the high-speed train model.
Motivated by above discussions, we use the T-S fuzzy model to represent the nonlinear train dynamics and convert the controller design to a solution of an optimization problem with MPC approach. This article is aimed at offering the following contributions to the growing body of work on optimal train control methods:
To better depict the in-train dynamics, the high-speed train is abstracted as a cascade of cars connected by spring-like couplers. Different to most high-speed train controllers which linearize the train dynamical model to facilitate the controller design, the T-S fuzzy model is employed to approximate the nonlinear dynamic model. The dynamic model is captured by a set of fuzzy rules which characterize local correlation in the state space, so that the deviations caused by linearization could be effectively alleviated. Furthermore, the fuzzy controller is given the fuzzy parallel distributed compensation form.
For the train operation problem, the fuzzy predictive approach uses the current train dynamic state, train model, and operational limits to calculate future changes in the control variable such that train performance criteria are optimized sequentially in infinite-time horizon subject to accelerating or braking constraints. A set of linear matrix inequalities (LMIs) is given as sufficient conditions for the existence of the proposed fuzzy predictive controller (FPC) as well as guaranteeing the various railway operational performances such as safety, energy consumption, riding comfort, and velocity tracking.
The rest of this article is organized as follows. Section “Problem formulation” first makes a detailed description for the nonlinear dynamic model of the high-speed train and then formulates the problem as a T-S fuzzy model. In section “FPC of high-speed train,” the FPC of high-speed train is designed. In section “Numerical simulations,” some numerical experiments are conducted to demonstrate the effectiveness of the introduced approaches. Finally, a conclusion is given in section “Conclusion.”
Notation
The symbol ☆ in a matrix denotes an entry that can be deduced from the symmetry of the matrix.
diag{·} represents a block-diagonal matrix.
Problem formulation
The dynamic model of high-speed train
As shown in Figure 1, we consider a train with n cars connected with elastic spring-like couplers. According to Newton’s law, the longitudinal dynamics for each car can be established in the following equation

where


Longitudinal dynamics of high-speed train.
The running resistance

where
Concerning line resistance and curve resistance,
30
the values of

where g is the gravity constant g = 9.81 N/kg and

where R is the track curve radius.
In this article, for the controller design of the high-speed train, we assumed that each car in the high-speed train has a separate control command. Then, the dynamic model of the high-speed train can be obtained from equations (1) to (5) that
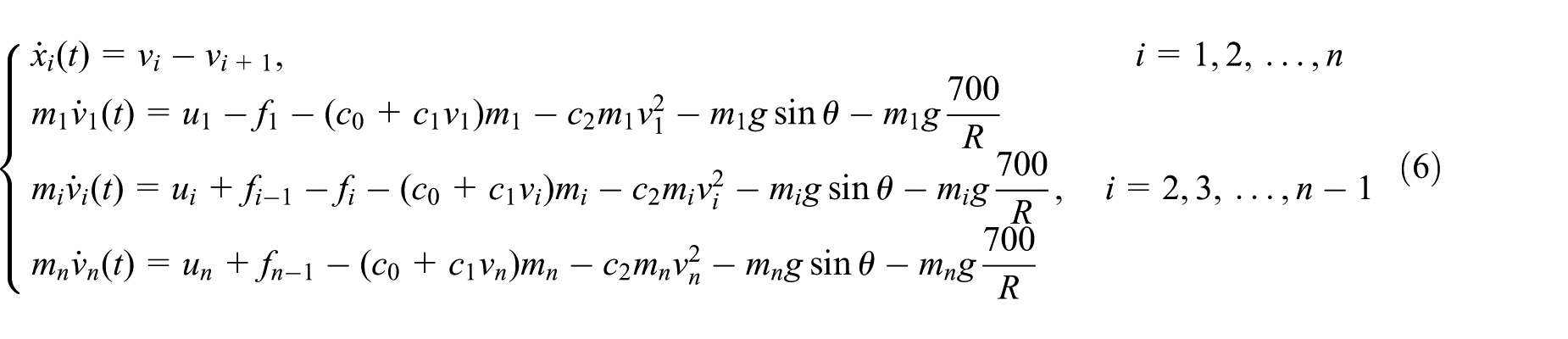
where

where k > 0 is the stiffness coefficient. As
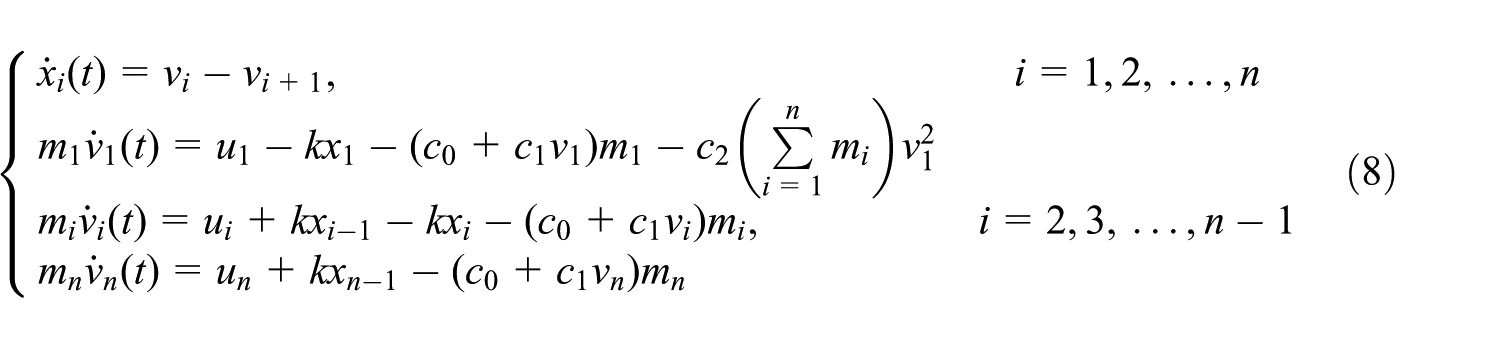
In this article, we mainly consider the rolling mechanical resistance and air resistance as leading factors for the running resistance, and the track geometry factors in the form of equations (4) and (5) are not considered. Besides, we suppose that the rolling resistance exerts on each car, while the air resistance acts only on the front car. Thus, the dynamic motion in the form of equation (6) can be simplified and transformed to the following form to facilitate the FPC design
We assume that the desired train speed is

Let

where



In order to apply the MPC framework, we choose a proper sampling period

where
T-S fuzzy model for the high-speed train
To approximate the nonlinear model of the high-speed train, the T-S fuzzy model is adopted to combine some linear models to form an overall single model through nonlinear membership functions. Here, we choose the speed deviations from the target speed profiles as the premise variables. According to the fuzzy model proposed by TS, 27 the high-speed train T-S fuzzy model is described by fuzzy IF-THEN rules, and the lth rule is presented as follows:
Fuzzy rule l: IF

Here, r is the number of model rules,

where
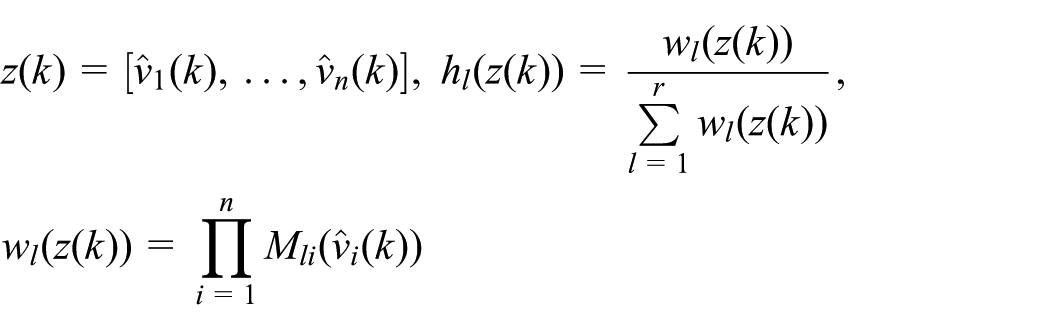
The term

for all k, we have

FPC of high-speed train
In this article, we mainly concern the safety, energy consumption, riding comfort, and punctuality performances of high-speed train. Therefore, the following objective function is introduced

where
Remark 1
In the objective function (14), the relative coupler deviations are defined as indicators of safety and riding comfort. Generally speaking, the integrand
Letting

where
At sample time k, construct a quadratic function

By summing equation (16) from

For the object function (15), it is reasonable to state that

where
Furthermore, the equivalent formulation of the optimal control problem is obtained as follows

where
FPC of high-speed train
In this subsection, we will detail the FPC for optimal control of high-speed train. We use the fuzzy rule–based state-feedback control law and consider the following fuzzy parallel distributed compensation form:
Rule l: IF

where

According to the fuzzy dynamic model of high-speed train (13) and fuzzy state-feedback law (18), the closed-loop system is represented by
We first introduce the following lemma which is useful for further proof.
Lemma 1
For any real matrices

where
Based on the Lyapunov stability theory, the following theorem will provide a sufficient condition for the existence of the FPC for high-speed train which stabilizes the overall system and minimizes the upper bound on the performance criteria defined in equation (15).
Theorem 1
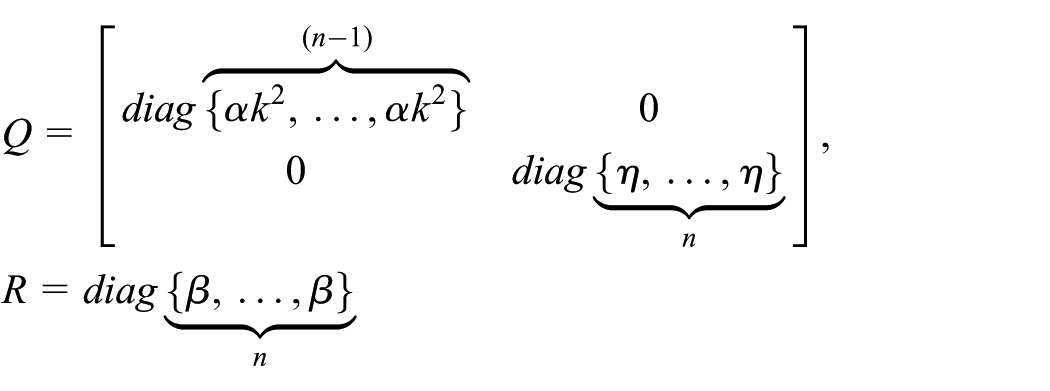
Consider the FPC of high-speed train in equation (13) with a properly designed fuzzy state-feedback control strategy in equation (19). For a given pair of positive definite matrices

subject to the following constraints


then the control gain
Proof
Considering the closed-loop system in equation (19), the stability constraint (16) yields that

Let

By Lemma 1, above inequality can be represented as

Noting that

it is obvious that the FPC is stable if we guarantee the following inequalities


However, according to the inequality

Since

Let
Using similar proof technique, inequality (26) can be obtained from equation (22). Thus, the FPC of high-speed train is stable.
Pre- and post-multiplying both sides of equation (23) by

By Schur complement, we obtain

Thus, the upper bound of the cost function is minimized, which indicates that control performance in equation (17) can be ensured through this approach. The proof is complete.
Remark 2
Theorem 1 gives a sufficient condition for choosing proper control gain
T-S fuzzy model for the high-speed train with input constraints
In practical movement, it is common to consider the constraints on the control inputs

To facilitate the FPC design for high-speed train with regard to the input constraints (27), we first introduce the stable invariant ellipsoid properties.
Lemma 2
Consider the closed-loop control system for high-speed train in the form of equation (19). At sampling time k, if there exist
Proof
Following equation (16), we have

which is equivalent to

Then, along equation (23), the following can be obtained

Let
Based on Lemma 2, the following theorem points out the specific condition under which the cost function in equation (15) is optimized with respect to the control input constraints.
Theorem 2
Consider the FPC of high-speed train in equation (13) with a properly designed fuzzy state-feedback control strategy in equation (19) and control input constraint in equation (27). For a given pair of positive definite matrices


where
Proof
We only need to prove that constraint (27) is ensured by equation (28). Considering the control input constraint on each car of high-speed train at sampling time k in equation (27), we have that

By Schur complement, above inequality is true if the following inequality holds


where
According to the inequality
Remark 3
Theorem 2 gives a sufficient condition for selecting proper control gain
Numerical simulations
To test the effectiveness of the FPC for the high-speed train, numerical experiments will be implemented in this section where analysis on the three weights will also be detailed. All the simulation studies are conducted based on Japanese Shinkansen high-speed train with 10 cars, 13 and the parameters are given in Table 1.
The simulation parameters of high-speed train.

With the consideration of both theoretical and practical factors, the membership functions for the speed-tracking error are chosen as shown in Figure 2.
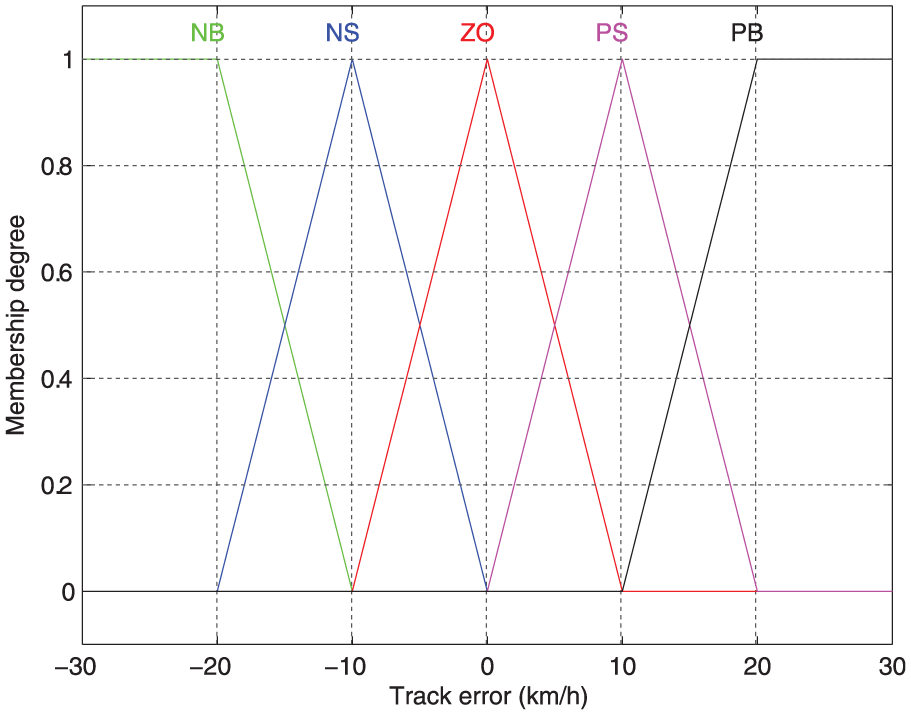
The membership functions of speed-tracking error.
Therefore, the fuzzy dynamic model of high-speed train (13) can be transformed to

where

In addition,
Example 1
In the first example, we set the sampling period
Suppose that the high-speed train is cruising at a initial speed of 180 km/h during the time interval [0 s, 100 s], that is,
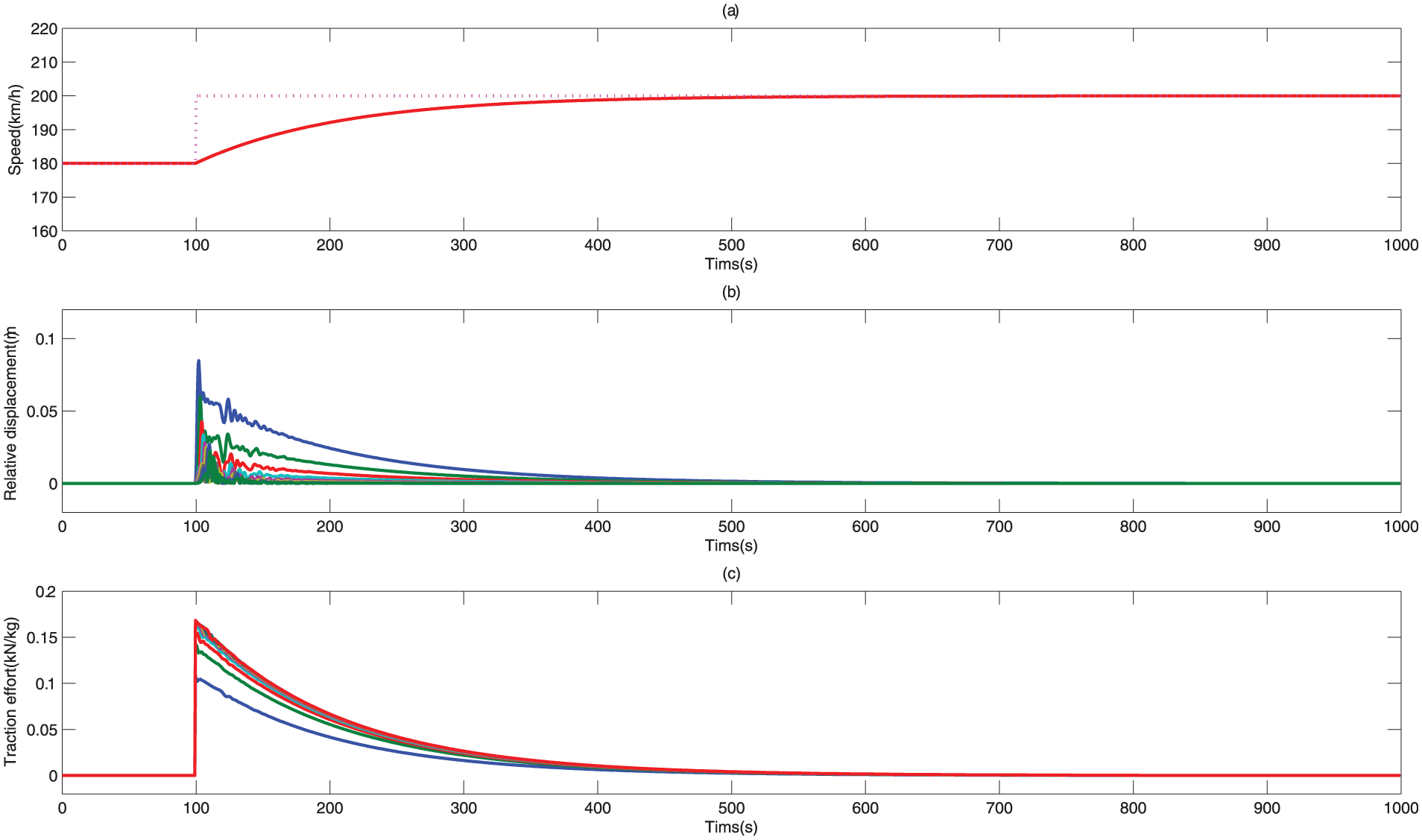
Optimal curves for each car under the fuzzy predictive controller with a higher desired speed: (a) Car speed, (b) Relative displacement of couplers, and (c) Traction effort.
Figure 3(b) and (c) depicts the variation curves of relative coupler deformations and the control signals exerted on each car. When the train starts to accelerate, both the deformations of spring-like coupler and the traction efforts remain positive. In order to provide necessary traction power, both the displacements and traction efforts go up remarkably at the beginning of acceleration phase. As the speed approaches the desired one, they follow a downward trend to balance different counting factors. Finally, the relative coupler deformations reach zero point which is considered to be the equilibrium state after t = 573 s. This trend is in accordance with speed-tracking error.
Example 2
In this example, a decreasing scenario is elaborated to verify whether the FPC can track a lower reference speed. The control parameters are the same to those used in Example 4.1 unless otherwise noted.
Suppose the desired speed

Optimal curves for each car under the fuzzy predictive controller with a lower desired speed: (a) Car speed, (b) Relative displacement of couplers, and (c) Brake effort.
From Figure 4, we can observe that as the reference speed changes to 180 km/h at the time
From what has been discussed above, it can be concluded that the FPC can be adapted to the operational constraints and allows the train to track predefined speed profile perfectly.
Performance of the FPC with different parameters
In this example, we give the sensitivity analysis on the three weights
For the convenience of energy consumption analysis in different control strategies, we use

Sensitivity of different
To check what follows when attention is paid on better velocity tracking results, we carry out the following simulation to examine the effects of velocity tracking weight

Simulation results with different
Similar effects for in-train forces can be found by doing some adjustments with
Comparative analysis
To better illustrate the performance of the proposed method, we implement another set of experiments to compare the performance of the proposed FPC with Zhang and Zhuan’s method (abbreviated as Zhang).
16
The optimization horizon

Comparisons between FPC and Zhang: (a) Mean speed, (b) Max relative displacement of couplers, and (c) Max traction effort.
These simulation results indicate that above two methods have very close train mean speed, but Zhang has greater maximum traction effort and relative coupler displacement than FPC. Especially, the maximum extension of coupler varies drastically in Zhang, which may bring more risk to the operational safety. As both FPC and Zhang adopt the MPC concept to solve the train optimal problem, it is safe to conclude that using T-S fuzzy model to describe the nonlinear train model can better control the in-train forces than just linearizing the train model in Zhang. The detailed performance values of the two methods are shown in Table 2, including energy consumption (EC), maximum relative coupler deformations (MRCD), and time to reach the equilibrium state (TRES).
Performance comparison.

EC: energy consumption; MRCD: maximum relative coupler deformations; TRES: time to reach the equilibrium state.
It is shown that FPC and Zhang do not have much discrepancy in TRES ability, but FPC has great advantages in energy-efficiency and longitudinal in-train forces. Thus, these results demonstrate the improved overall performance of the proposed approach.
Conclusion
In this article, we discuss the problem of fuzzy predictive optimal control of high-speed train. We use the T-S fuzzy model to represent the nonlinear train dynamics and convert the controller design to a solution of an optimization problem with MPC approach. A set of LMIs is given as sufficient conditions for the existence of the proposed FPC subject to input constraints. With the introduced method, each car tracks the desired velocity profile, every coupler is stabilized to the equilibrium state, and meanwhile the safety, comfort, energy-efficiency, and speed-tracking ability are guaranteed. The effectiveness and applicability of the proposed method have been illustrated by numerical examples. Furthermore, as a typical networked control system, the optimal control of high-speed train with imperfect communication links can be an interesting research topic which remains to be evaluated in my future research work.
Footnotes
Academic Editor: Anand Thite
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This paper was partially supported by Beijing Laboratory of Urban Rail Transit, Beijing Key Laboratory of Urban Rail Transit Automation and Control, and by Beijing Jiaotong University Technology Funding Project under grant 2016JBM005.