
Abstract
This article studies the problem of spacecraft autonomous rendezvous control for elliptical target orbits with external disturbance and thruster faults. The Clohessy–Wiltshire equation of elliptical target orbits without linearization is employed to describe the relative dynamic model as a linear time-varying system, such that the model errors in traditional linearization modeling methods are avoided. By on-line estimation of thruster faults and external disturbance, an adaptive sliding-mode control scheme is designed to eliminate the effects of the thruster faults and external disturbances, such that the reachability of the proposed integral sliding surface is ensured. Finally, a numerical example is established to illustrate the effectiveness of the proposed control approach.
Introduction
Spacecraft autonomous rendezvous has long been a hot research topic in the areas of manned spaceflight technology,1–3 where Clohessy–Wiltshire (C-W) equation has been one of the most popular modeling strategies to investigate the control problems of spacecraft autonomous rendezvous. It is well known that spacecraft orbit control system refers to a class of typical mechanical systems. In fact, the classical C-W equation was first presented by Clohessy and Wiltshire 4 in 1960, which has been widely applied to address the problem of linear relative motion between two neighboring spacecrafts.5–7 Generally speaking, in a C-W equation, the target orbit patterns are generally classified as circular and elliptical orbits, where elliptical orbits are more practical and realistic in engineering applications. However, most literatures on spacecraft autonomous rendezvous are only concerned with circular target orbits, while the investigation on elliptical orbits has received little research attention. In fact, the difficulties of this research topic mainly lies in the following two folds: (1) it is difficult to develop appropriate methodology to completed spacecraft autonomous rendezvous due to the time-varying nature of system parameters in elliptical orbits and (2) most of the obtained designed methods in the existing literature are based on linearized dynamical model, which, however, introduced model error and further results in possible control system performance degradation. However, if we do not perform the linearization for the C-W equation, the resulting system refers to a linear time-varying system, which is difficult to make analysis and synthesis work. 8
Thruster faults are frequently encountered in practical aerospace engineering, such as nozzle leakage and nozzle blocking.9–13 Thruster faults may render to instability, poor performance of systems, and even missions failed.14–16 Therefore, in spacecraft control systems design, thruster faults should be considered together in order to guarantee the performances of control systems. In the past few years, a few results have been reported in the literature on robust fault-tolerant control for spacecraft autonomous rendezvous.17–21
On another research forefront, it is well known that sliding-mode control is an effective robust control approach for uncertain systems, which possesses various valuable features such as insensitiveness against parameter variations and external disturbance, and fast response.22–26 In the past decades, sliding-mode control strategy has been used to solve a wide range of practical engineering problems arising in networked control systems and hypersonic vehicle systems.27–30 In Li and Zheng, 31 a robust adaptive second-order sliding-mode control scheme with finite reaching time is proposed for a class of uncertain non-linear systems. In Shi et al., 25 a new sliding-surface function design method is proposed for a class of linear continuous-time systems with stochastic jumps. The developed method can be used to the sliding-mode control of discrete-time stochastic systems. In Chen and Geng, 32 a novel high-order sliding-mode control approach has been developed for spacecraft rendezvous and docking. Recently, the sliding-mode controller design problems have been extensively investigated for fault-tolerant control of spacecraft autonomous rendezvous in He et al. 33 In Pukdeboon and Kumam, 34 Xu et al., 35 Li et al., and 36,37 Wang et al., 38 the sliding-mode control-design problems are considered involved with the adaptive mechanism, which can deal with energy-unbounded disturbance effectively. Adaptive control is an effective way to account for system uncertainties or unknown parameter variations.24,39–42 During the last few decades, a few adaptive robust control methods have been developed for spacecraft attitude control. 7 Therefore, in this article, an adaptive sliding-mode control strategy will be designed to solve the problem of disturbance rejection control with thruster faults for spacecraft autonomous rendezvous.
It should be pointed out that, however, in almost all the aforementioned works on thruster faults of spacecraft autonomous rendezvous, the thruster faults are simply modeled by scaling factors. Apparently, the realistic thruster faults are more complex than such a simple mathematical model. Hence, it is necessary to establish new thruster fault modes for spacecraft autonomous rendezvous. Motivated by the above observations, in this article, we study the adaptive sliding-mode control problem of spacecraft autonomous rendezvous with elliptical orbits and thruster faults, where the non-linearization C-W equation of elliptical target orbits is employed. First, an on-line adaptive estimation scheme is employed to the thruster faults and external disturbance. Second, an adaptive control strategy is developed to deal with the unknown external disturbance and reject the effects of the thruster faults effectively. The proposed adaptive sliding-mode control scheme cab guarantee the reachability of the integral sliding surface despite thruster faults. Finally, the usefulness and effectiveness of the proposed design method is illustrated via a practical example.
Problem formulation
Suppose that target’s orbit is an elliptical orbit and the distance between two spacecrafts is quite small compared with the orbit radius. We define the relative coordinate system as follows: the orbital coordinate frame is a right-hand Cartesian coordinate with the origin attached to the target spacecraft center of mass, and the x-axis is aligned with the vector from the earth center to the target center of mass; the y-axis is along the target orbit circumference; and the z-axis completes an orthogonal right-handed frame. The relative dynamic model between the two spacecrafts can be described as
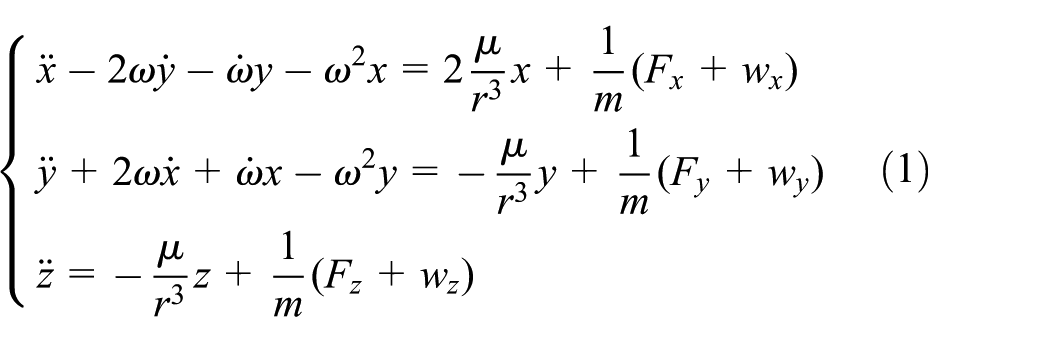
where

where a is the semi-major axis,

where

Then, equation (1) can be rewritten as

where

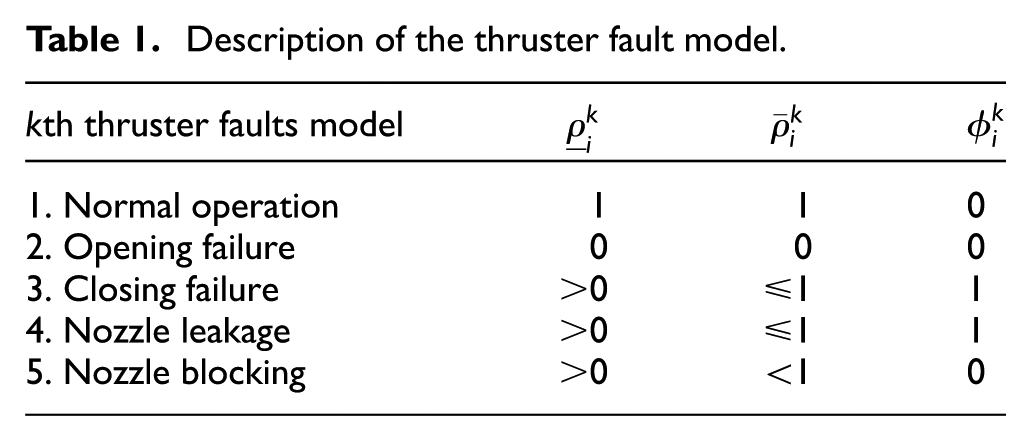
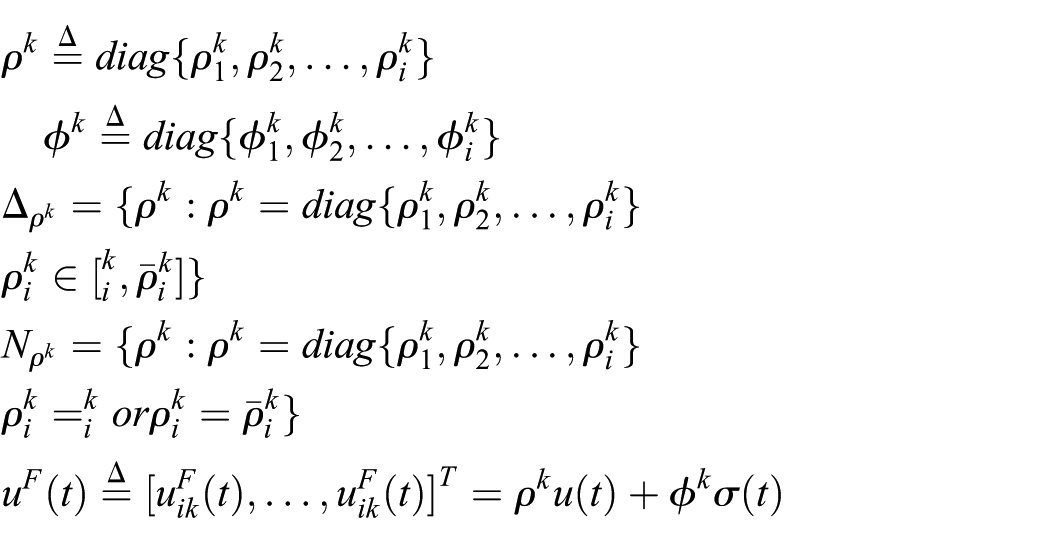
During spacecraft autonomous rendezvous process, the thruster faults are usually inevitable. Hence, in this article, it is assumed that the thruster faults may happen and the mathematical description of the thruster failures can be described by

where

where
Description of the thruster fault model.
Then, we define the following sets
In order to facilitate the subsequent research, we consider the closing failure and nozzle leakage of the thruster. The description of the thruster faults (equation (3)) can be described by

where

Given the desired states

and
Sliding-mode control and adaptive control have strong robustness for the unknown parameters and nonlinearity. So in this work, our aim is to design an adaptive sliding-mode control to solve the control problem of the dynamic system (equation (5)), wherein the integral sliding-surface function

where

Define two new variable matrices as

The derivative with respect to the time of the sliding-surface function is calculated as

For
By substituting equation (10) into the control system (equation (5)), we obtain

Equation (11) can be rewritten as

where

The following theorem presents the sufficient condition for the asymptotic stability for sliding dynamic system (equation (12)).
Theorem 1
Considering the spacecraft relative dynamic control system (equation (5)), if there exists symmetric positive definite matrix

then, the system (equation (5)) is asymptotically stable on the sliding surface
Proof
Let the Lyapunov function candidate for the system is chosen as

It is easy to prove Theorem 1, and we omit the detailed proof for space reason.
In order to ensure the reachability of the sliding surface
Theorem 2
Considering the relative dynamic system (equation (5)), the adaptive sliding-mode control law is given by

where updating laws of the adaptive variable

where

where
Proof
Considering the system (equation (5)) of spacecraft autonomous rendezvous in elliptical target orbits, the Lyapunov function is chosen as

The derivative of the function

The adaptive parameter estimation error is defined as

where

In equation (21), the following equalities hold

Because

Substituting equations (22) and (23) into equation (21), it can be rewritten as

Considering the term (3) of equation (19), the inequality, which uses the similar method of dealing with
Considering the following term of the equation (19) is calculated as

By substituting equations (20) and (24)–(26) into equation (19), we obtain

By substituting the updating laws (equation (16)) into equation (27), we obtain

where

Then, the following inequality is obtained

Thus, the inequality
Illustrative example
In this section, an example is presented to illustrate the effectiveness of the adaptive sliding-mode control strategy proposed in this article. For simplicity, we assume that the initial state
Working condition 1. The upper and lower bounds of
Working condition 2. The upper and lower bounds of
Orbit parameters of the target spacecraft.

Remark 1
Remark notes that the estimated values are needed to construct adaptive controller in our controller design procedure. According to the correlative analysis in Ioannou and Sun, 43 whether they can converge to their true values or not is not necessary.
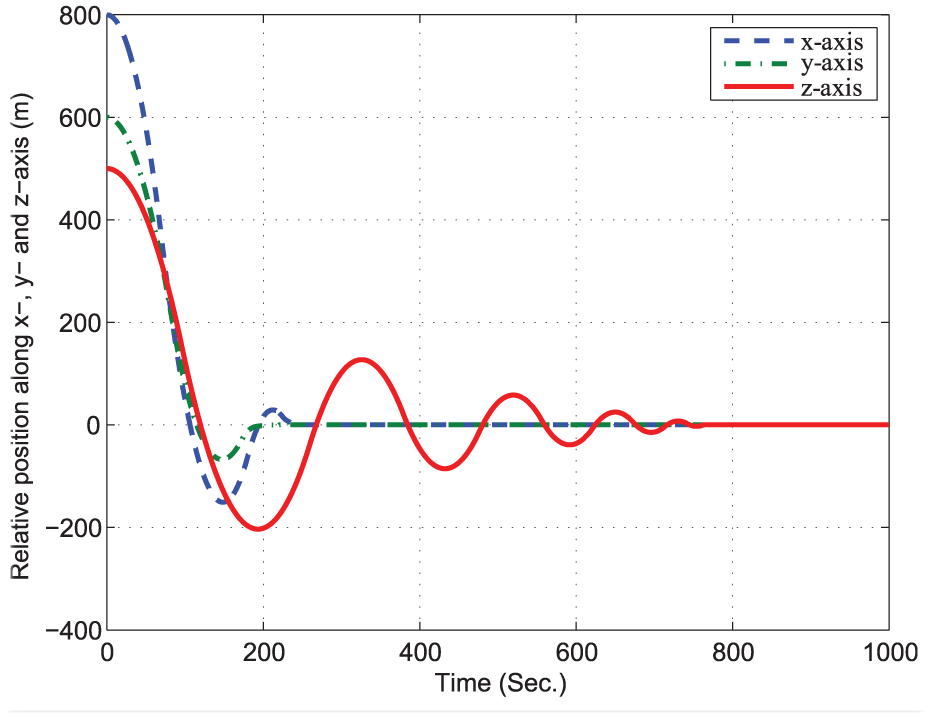
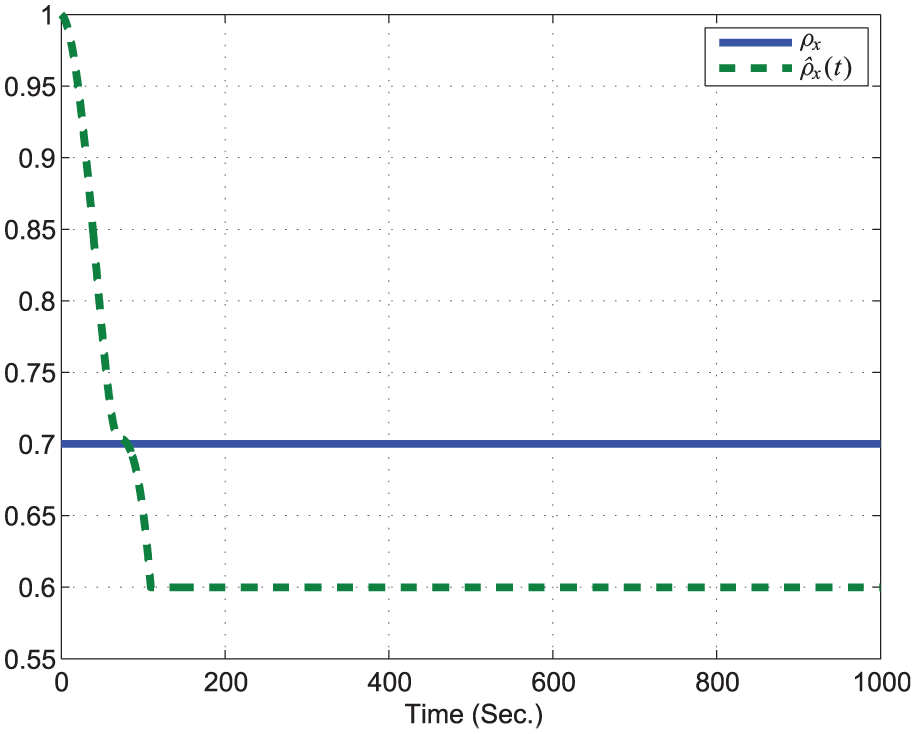
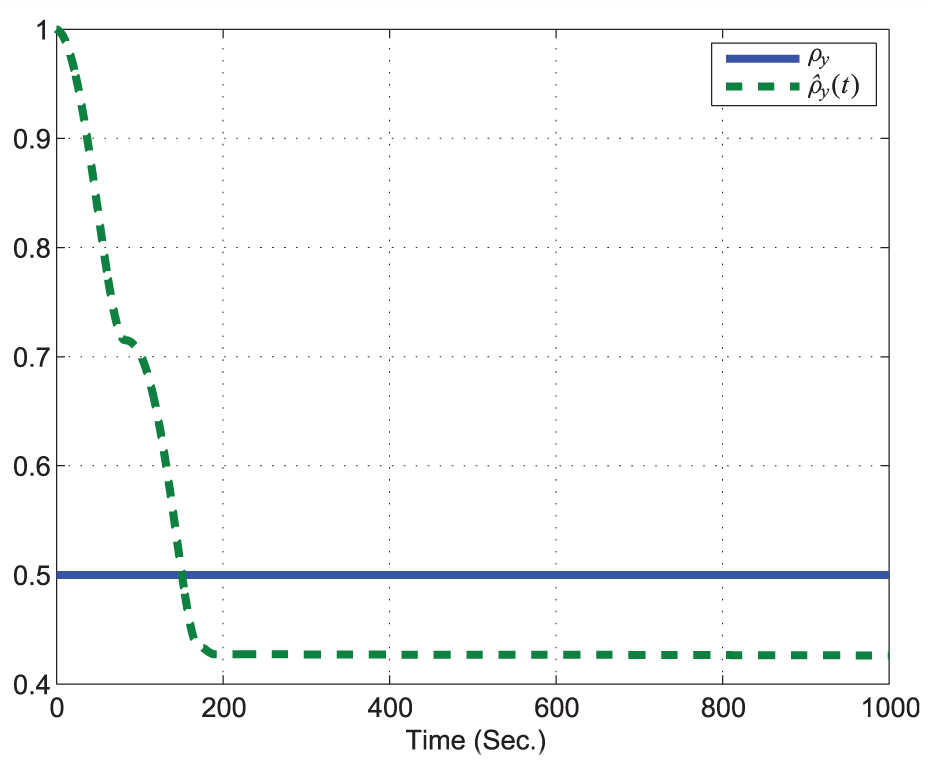
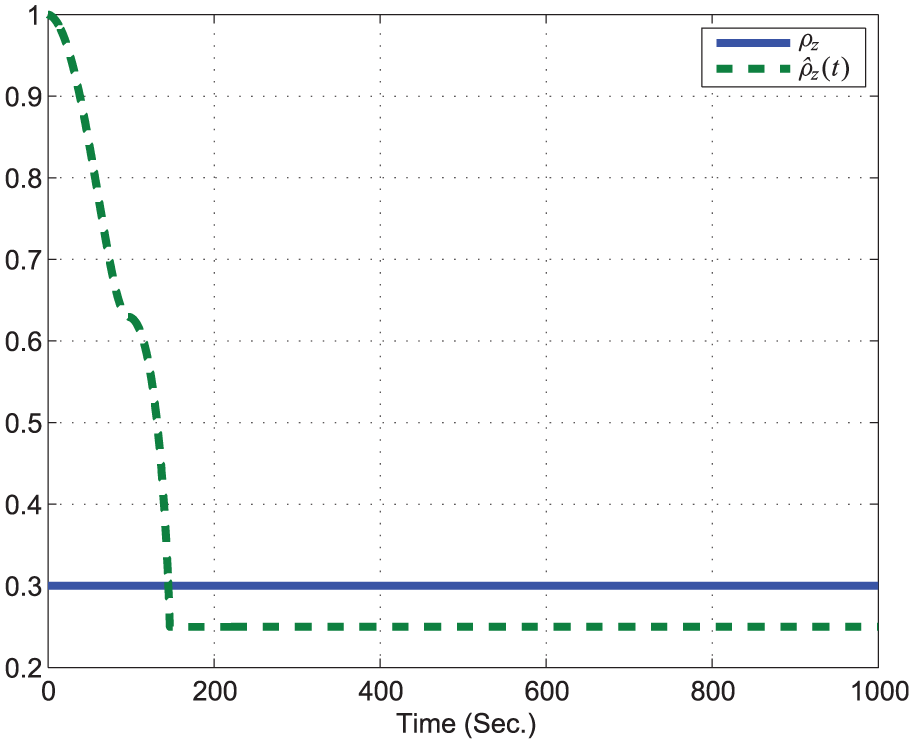
The simulation results are given in Figures 1–12. Among them, Figures 1–6 show the simulation results for working condition 1, and the relative position of the two spacecrafts is given in Figure 1. The relative velocity of the two spacecrafts is given in Figure 2, the sliding mode is given in Figure 3, and the fault parameters of

Trajectories of position (Condition 1).

Trajectories of velocity (Condition 1).

Trajectories of sliding variable (Condition 1).

Fault parameter

Fault parameter

Fault parameter
Trajectories of position (Condition 2).

Trajectories of velocity (Condition 2).

Trajectories of sliding variable (Condition 2).
Fault parameter
Fault parameter
Fault parameter
In order to make comparison, a proportional–derivative (PD) control law is also applied to the spacecraft relative dynamic system with and without thruster faults, and the PD control strategy is designed as

where
Figure 13 depicts the relative positions along x-, y-, and z-axis of the controller (equation (30)) without thruster faults. It is seen clearly that the spacecraft relative position stabilization could be achieved in 6000 s. In the case of thruster faults, we choose the same value of fault parameter
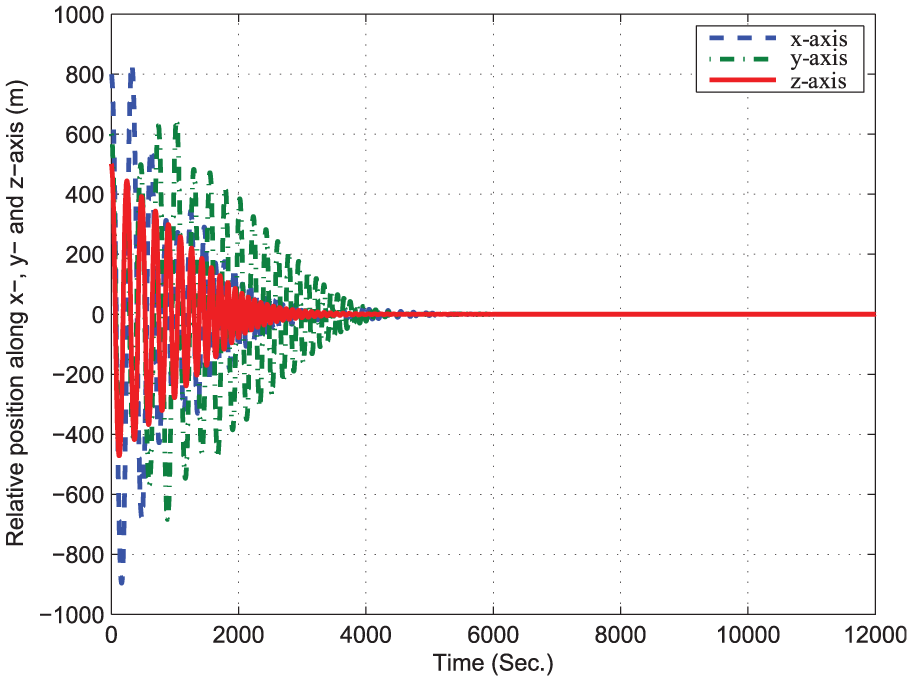
Trajectories of position of controller (equation (30)) without faults.

Trajectories of position of controller (equation (30)) with faults.
Conclusion
In this article, we have studied the stabilization problem with external disturbance and thruster faults which uses the unhandled C-W equation of the elliptical target orbits for the spacecraft autonomous rendezvous. Considering the external disturbance and thruster faults, an adaptive sliding-mode control scheme has been designed such that the resulting closed-loop system is asymptotically stable and also achieves spacecraft autonomous rendezvous. A simulation example has been provided to show the effectiveness of the proposed design method.
Footnotes
Academic Editor: Zheng Chen
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported by the New Century Excellent Talents Program of the Ministry of Education of the Peoples Republic of China (no. NCET-13-0170), the National Natural Science Foundation of China (nos 6147 3096, 91438202, 61304237, 61673133, and 61333003), and the Open Fund of National Defense Key Discipline Laboratory of Micro-Spacecraft Technology (no. HIT.KLOF.MST.201505).