
Abstract
Dynamic properties and vibration suppression capabilities of an axially moving sandwich beam with a magnetorheological fluid core were investigated in this study. The stress–strain relationship for the magnetorheological fluid was described by a complex shear modulus using linear viscoelasticity theory. First, the dynamic model of an axially moving magnetorheological fluid beam was derived based on Hamilton’s principle. Then, the natural frequency of the sandwich beam for the first mode was determined. Later, the effects of the speed of the axial movement, axial force, applied magnetic field, skin–core thickness ratio, and their combination on the dynamic properties of the sandwich beam with a magnetorheological fluid core were investigated. It was found that these parameters have significant effects on the dynamic properties of the sandwich beam. Moreover, the results indicate that the active control ability of magnetic field has been influenced by the axial force, moving speed, and increasing skin–core thickness ratio.
Keywords
Introduction
Axially moving beams can represent many engineering devices, such as mechanical arms, automotive belts, band saw blades, and so on. Despite the many advantages of these devices, the associated noises and vibrations have impeded their applications. In order to control these noises and vibrations, some smart materials such as electrorheological (ER),1–5 magnetorheological fluids (MRFs)/elastomers,6–10 shape memory alloy (SMA),11–14 piezoelectric patches (PEP),15,16 and shear thickening fluid (STF)17–19 have been applied in these structures. However, there have been very few dynamic analyses of axially moving structures that have incorporated smart materials. Therefore, in this article, how movements affect the dynamic properties of an axially moving sandwich beam that has integrated an MRF is investigated, and the capability of an MRF core to suppress vibrations is evaluated as well.
In the past decades, several studies have concentrated on the dynamic characteristics, stability, and vibration control of axially moving beams. Natural frequencies of axially moving beams with pinned–pinned ends and clamped–clamped ends were studied by Öz and Pakdemirli 20 and Öz, 21 respectively. Ghayesh and Khadem 22 analyzed the free nonlinear transverse vibration of an axially moving beam. In their article, the natural frequency versus mean velocity and rotary inertia were plotted, and the natural frequency versus the mean velocity and temperature for the first two modes were also given. Ding and Chen 23 obtained the natural frequencies for nonlinear coupled planar dynamics of an axially moving beam in the supercritical speed regime via discrete Fourier transform. The effects of both non-ideal boundary conditions and axial velocity on the natural frequencies of an axially moving beam were investigated by Bağdatlı and Uslu. 24 For the effect of time-dependent velocity, Rezaee and Lotfan 25 investigated the natural frequencies, complex mode shapes, and responses of an axially moving nanoscale beam by directly using the multiple-scale method and a power series method.
On the sandwich structures with some smart materials, MalekzadehFard et al. 26 investigated the free vibration and buckling of a sandwich panel with MRF layer under simply supported boundary conditions. The effects of magnetic field and geometrical parameters on the dynamic properties of the first four mode shapes are also discussed. Wei et al. 2 studied the vibration control of a flexible rotating sandwich beam with an ER core. Meanwhile, they assessed the influences of both various electric field strengths and rotating speeds on the natural frequencies of the rotating ER beam. Wei et al. 27 investigated the vibration characteristics of a sandwich beam with an MRF under different magnetic field intensities and different rotating speeds using the finite element theory. The dynamic stability of a rotating three-layered symmetric sandwich beam with a magnetorheological (MR) elastomer core subjected to axial periodic loads was studied by Nayak et al. 28 For the PEP sandwich beam, Ozdemir and Kaya 29 investigated the extension and flapwise bending vibrations of a rotating piezolaminated composite Timoshenko beam. Numerical results were obtained to investigate the effects of the applied voltage, ply orientation, rotational speed, and hub radius on the natural frequencies and tip deflection. It can be seen that some efforts have been made on rotating sandwich beams with various smart material cores. However, the dynamic properties of an axially moving sandwich beam with an MRF core are yet to be explored.
In this study, the sandwich structure with an MRF is employed to control vibrations of axially moving beams. The MRF, which is sandwiched between two elastic layers, acts as a viscoelastic-damping layer with controllable shear modulus. First, a dynamic model of the axially moving sandwich beam is developed based on Hamilton’s principle, with the material characteristics of the MRF and the dynamic stiffening caused by axial motion taken into consideration. Then, the effects of axial velocity, axial force, skin–core thickness ratio, magnetic field, and combinations of them on the natural frequencies of the sandwich beam are analyzed.
Model formulation of a sandwich beam with MRF core
Axially moving model of a sandwich beam
An axially moving sandwich beam with an MRF core and conductive aluminum skins subjected to periodic excitation is shown in Figure 1. A number of assumptions are made as follows: (a) deformations of top and bottom layers obey the Euler–Bernoulli beam theory, (b) the external rigidity of the moving beam is large enough to render the longitudinal displacement from the preload tension negligible, (c) the MRF core deforms only due to shear, (d) the three layers have the same transverse displacement z, (e) there is no slippage and delamination between the adjacent layers during deformation, and (f) the axial load is less than the buckling load of the beam.

Schematic diagram of MRF-embedded cored sandwich moving beam: (a) axially moving sandwich beam with MRF core subjected to axial load and (b) configuration of a sandwich beam with MRF.
Based on the above assumptions, the governing equations of motion for the sandwich beam are obtained using the extended Hamilton’s principle, which states that

where δT, δV, and δW are kinetic energy, potential energy, and the work done by external force, respectively.
If the strain level of the MRF is considered to be <1%, then its rheological property is in the pre-yield regime and can be described by the linear viscoelastic theory. Thus, the final form of Hamilton’s principle including the kinetic energy, potential energy, and work done over the sandwich beam terms can be presented as

where δTV and δTR denote the kinetic energies due to transverse and rotational motions, respectively; δVE, ε and δVE, b represent the potential energy due to extensional and bending stresses of the surface plates, respectively; δVE, P denotes the potential energy due to axial force; and δVMR, s is the potential energy due to shear stresses of the MR core.
Furthermore, these terms can be expressed in the following form28,30,31







where w(x, t) and θ(x, t) are the transverse and rotational displacements of the sandwich beam at location x and time t, respectively; ρ(x) is the density of the beam; J(x) is the mass moment of inertia; v is the axial velocity; P is the axial force; f(x, t) is the external force; E and I are Young’s modulus and moment of area of the top and bottom layer materials, respectively; G* is the complex shear modulus of the MRF core; h1, h2, and h3 are the thicknesses of the top, core, and bottom layers, respectively; L and b are the length and width of the beam, respectively; γ(x, t) is the shear displacement of the MRF material and has the following form

Substituting equations (3)–(6) into Hamilton’s equation and integrating by parts, the equations of motion yield

The hinge supports are assumed to be used at the two ends of sandwich beam. Therefore, the associated mechanical boundary conditions can be written as

From the classical beam theory, the displacement of beam under a transverse periodic excitation can be written as


where ωn is the nth natural frequency of the beam, ϕn(x) is the nth mode shape of the transverse vibration, and φn(x) is the nth mode shape of the rotational vibration and can be further expressed as follows


in which Cn denotes the ratio of the rotational and transverse displacement amplitudes, and λn can be written as

Since the transverse vibration frequency is much higher than the rotational vibration frequency for the sandwich beam with MRF core, the influence of the rotational inertia force can be ignored. 32 Thus, substituting equations (9) and (10) into equation (7a) and simplifying the equation yields

According to equations (10a) and (10b), the nth mode shape of the rotational vibration can be written as

Furthermore, the rotational displacement can be written as

where qn(t) is the generalized displacement function.
Substituting equations (9a) and (14) into equation (7b) and using Galerkin’s approach, the dynamic model of an axially moving sandwich beam can be obtained

Each function ϕi(x) is used as the weighting function for the residual to equation (15), and the following orthogonal property is used

where the mass, damping, and stiffness matrices are given, respectively, by



Thus, considering n = 1, an expression for the natural frequency can be obtained

Furthermore, the complex natural frequency is expressed as

where ω is the natural frequency and η is the system loss factor.
MRF material
MRF is one of the materials of controllable rheological properties. These properties, such as viscosity, elasticity, and plasticity, can undergo instantaneous and reversible changes when subjected to a magnetic field. Because the rheological response has a yield point, the rheology of MRFs is approximately modeled in pre-yield and post-yield regimes. Moreover, since the strain level of an MRF is <1% in the pre-yield regime, the model in the pre-yield regime can be used as a linear viscoelastic model. Thus, the model considered in this study is based on the pre-yield rheological properties of MR materials.
The shear stress of the MRF layer can be expressed as

where γ(x, t) is the shear strain and G* is the complex shear modulus.
The complex shear modulus G* is a function of the magnetic field strength applied on the MRFs and can be written in the form

where G′(B) is the storage modulus and G″(B) is the loss modulus and are given by 32


in which B is the magnetic field strength, and its unit is Tesla.
Substituting equations (19)–(22) into equation (18), it can be seen that the natural frequency of the axially moving sandwich beam has been influenced by axial velocity, axial force, thickness ratio of skin–core, and the controllable magnetic field strength.
Results and discussion
The dynamic characteristics and vibration suppression capabilities of the MRF cored sandwich beam with various system parameters are investigated in this section. Since the moving velocity of the beam does not exceed the critical velocity, the stable/unstable region of the moving beam is not studied. The other physical parameters and material properties of the beam are set as follows: E1 = E3 = 72 GPa, L = 416 mm, b = 30 mm, and ρ = 2700 kg/m3, which are consistent with the parameters in Nayak et al. 28 The natural frequency of the sandwich beam with h1 = h2 = h3 = 1 mm under the combined effects of the axial force and magnetic field are first investigated. Then, the combined effects of the axial velocity and magnetic field are evaluated. Finally, the effects of both the skin–core thickness ratio and magnetic field on the nature frequency are studied.
For the case of the magnetic field B = 0.5 T and the skin–core thickness ratio γ = 1, variations in the natural frequency (ω) of the sandwich beam with both the axial velocity (v) and the axial force (P) are shown in Figure 2. It can be seen that for a constant axial force (either compression or tension), the natural frequency increases nonlinearly with the axial velocity. If the beam is subjected to compression, dynamic properties of the sandwich beam depend on a critical velocity. Meanwhile, the critical velocity increases with compression. For instance, when B = 0.5 T, the critical velocities for P = 100 and 500 N are 12.3 and 23.4 m/s, respectively. On the contrary, if the beam is subjected to tension, dynamic properties of the sandwich beam is independent of the critical velocity. For example, with B = 0.5 T, when v = 0 m/s, the natural frequencies for P = −10N and −500 N are 1.06 and 3.05 rad/s, respectively.

Effect of initial axial force P (N) on the natural frequency versus axial velocity when the magnetic field strength B = 0.5 T and the skin/core thickness ratio γ = 1.
The effects of axial force (P) and varying magnetic field strength (B) on the capability of natural frequency suppression when the skin–core thickness ratio γ = 1 are shown in Figure 3. As seen in Figure 3(a) and (b), the suppression capability of the MRF in the natural frequency increases nonlinearly with increasing magnetic strength for a constant axial force. Consider P = 100 N and v = 15 m/s as example (Figure 3(b)), the natural frequency of the sandwich beam is suppressed by 3.4% at B = 0.5 T, 7.8% at B = 1.0 T, and 27.2% at B = 2.0 T. However, the suppression capability decreases gradually with increasing axial velocity. As P = 100 N and B = 2.0 T (Figure 3(b)), the suppression ratio of the natural frequency is 27.2% at v = 15 m/s, 8.3% at v = 20 m/s, and 4.4% at v = 25 m/s. Moreover, comparing Figure 3(a) and (b) shows that the MRF core has significant control ability on the natural frequency of the sandwich beam when the axial force is tensional and the axial velocity is much lower. Referring to Figure 3(a), as P = −100 N and B = 2.0 T, the suppression ratio of the natural frequency is 41.7% at v = 0 m/s, 27.6% at v = 5 m/s, and 14.4% at v = 10 m/s, respectively.

Effect of axial force P (N) and magnetic field strength B (T) on the capability of natural frequency suppression when the skin/core thickness ratio γ = 1: (a) P = −500 N and −100 N and (b) P = 0 N, 100 N and 500 N.
The natural frequency of the sandwich beam versus the axial force (P) with varying axial velocity (v) is plotted in Figure 4. The magnetic field strength (B) is set to 0.5 T, and the skin–core thickness ratio (γ) is set to 1. Referring to Figure 4, the natural frequency curve moves toward the right with increasing axial velocity, which indicates that the natural frequency increases with the velocity under a constant axial force. As v = 0 m/s, the natural frequency of the sandwich beam only exists when the axial force is tensional, and the natural frequency increases with the tension. Furthermore, as the velocity is >0, for example, v = 10 and 20 m/s, the natural frequency varies with the type of the axial force. More specifically, if the axial force is a tension, the natural frequency increases with the tension. On the contrary, if the axial force is a compression, the natural frequency decreases with the compression.

Effect of axial velocity v (m/s) on the natural frequency versus axial force when the magnetic field strength B = 0.5 T and the skin/core thickness ratio γ = 1.
The effects of varying axial velocity (v) and magnetic field (B) on the capability of natural frequency suppression of an axial moving MRF cored sandwich beam are shown in Figure 5. For a specified velocity curve, it can be found that the suppression capability of the MRF on the natural frequency nonlinearly increases with increasing magnetic strength. As v = 10 m/s and P = 0 N (see Figure 5(a)), the natural frequency of the sandwich beam is suppressed by 4.3% at B = 0.5 T, 13.4% at B = 1.0 T, and 42.5% at B = 2.0 T, respectively. Moreover, when the axial force is compression, the suppression capability of the MRF gradually increases with the increasing axial force. As v = 20 m/s and B = 2.0 T, the suppression ratios of the natural frequency are 8.3% for P = 100 N, 14.3% for P = 200 N, and 42.7% for P = 300 N. However, when the axial force is a tension, the suppression capability only has a slight decrease as the tension increases. For the case with v = 20 m/s and B = 2.0 T, the suppression ratios of the natural frequency are 4.7%, 3.9%, and 3.2% for P = −100, −200, and −300 N, respectively. It is worthwhile to note that the suppression capability of the MRF on the natural frequency is greater when the axial force is expressed as compression than tension with the same magnitude, and the difference becomes more significant as the axial force increases. When v = 20 m/s and B = 2.0 T, the suppression ratios are 8.3% for P = 100 N, 4.7% for P = −100 N, 42.7% for P = 300 N, and 3.2% for P = −300 N.
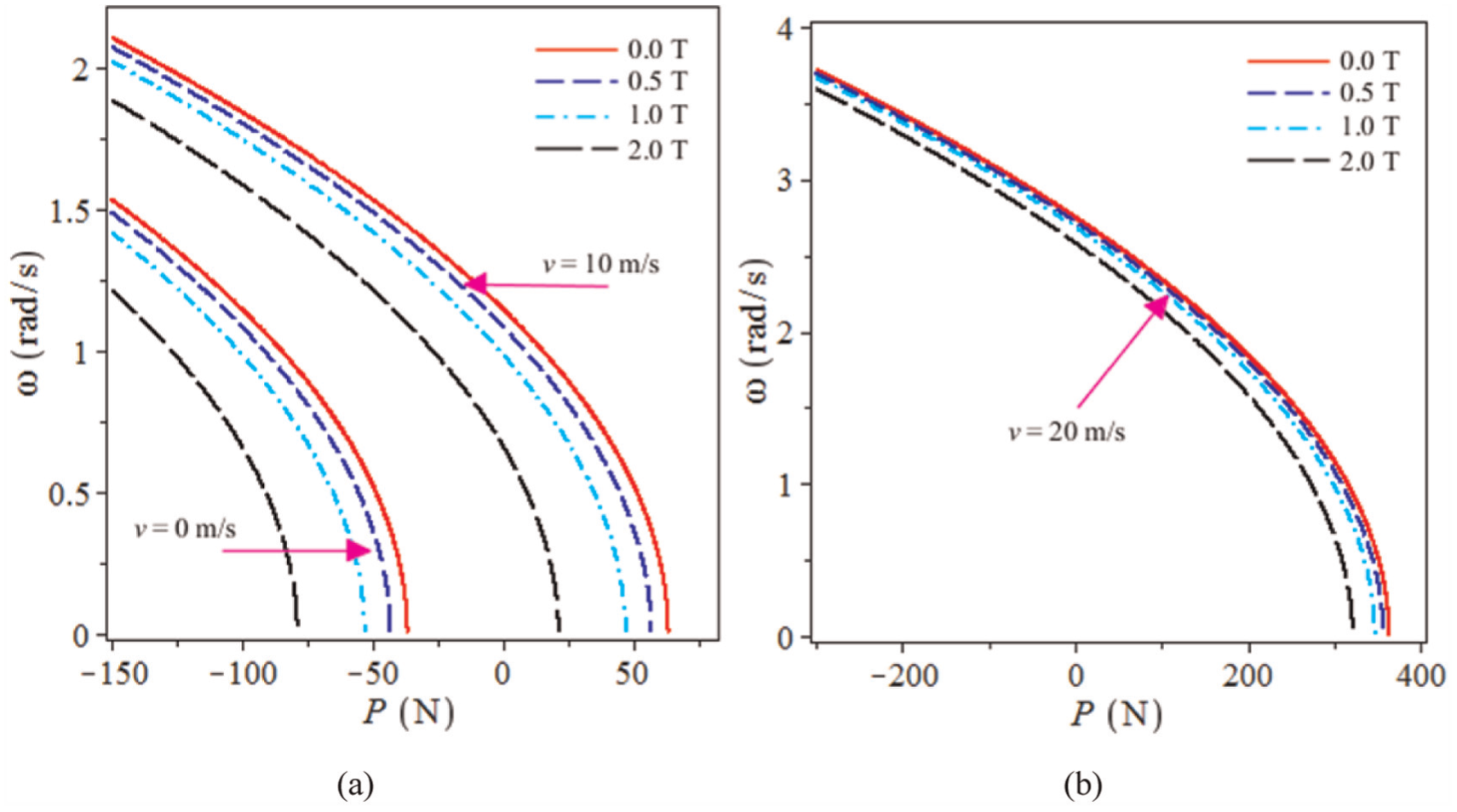
Effect of axial velocity v (m/s) and magnetic field strength B (T) on the capability of natural frequency suppression when the skin/core thickness ratio γ = 1: (a) v = 0 m/s and 10 m/s and (b) v = 20 m/s.
The effects of skin–core thickness ratio on the nature frequency of the axial moving MRF cored sandwich beam are shown in Figure 6. As the skin–core thickness ratio increases, the natural frequency increases nonlinearly. However, the increases become nearly linear as the thickness ratio exceeds 1.0, which implies that the effect of the thickness ratio on the natural frequency is negligible. In addition, the nonlinearity behavior of increase is independent of both the axial force and velocity, while it has a significant effect on the natural frequency.

Effect of the skin/core thickness ratio γ on the natural frequency versus axial force when the magnetic field strength B = 0.5 T.
The influences of the skin–core thickness ratio (γ) and varying magnetic field strength (B) on the suppression capability of natural frequency are shown in Figure 7. It can be seen that the suppression capability of the MRF exhibits a nonlinear decrease trend with thickness ratio. When v = 20 m/s, P = −100 N, and B = 2.0 T, the suppression ratio of the natural frequency is 10.3%, 4.8%, and 2.3% for the skin–core thickness ratio γ = 0.5, 1.0, and 2.0, respectively. Furthermore, the axial velocity and the axial force have non-negligible effects on the suppression ratio. In particular, as B = 2.0 T, comparing case 2 and case 4 and case 3 and case 4 demonstrates that the suppression ratio of the natural frequency is reduced by 26.2% and 27.5% at γ = 0.5, 9.3% and 9.8% at γ = 1.0, and 4.0% and 5.8% at γ = 2.0, respectively.

Effect of skin/core thickness ratio γ and magnetic field strength B (T) on the capability of natural frequency suppression: (a) Case 2 and Case 4 and (b) Case 3 and Case 4.
Conclusion
In this article, the dynamic model of an axial moving sandwich beam filled with MRF core has been studied. Considering the stress–strain relationship of the MRF described using linear viscoelasticity theory, the corresponding equations of motion are derived based on Hamilton’s principle. The variation of natural frequency for different system parameters such as axial velocity, axial force, the skin–core thickness ratio, and magnetic field strength has been investigated. Moreover, the vibration suppression capabilities of an MRF in the sandwich beam have been evaluated for different system parameters.
The natural frequency increases nonlinearly with the axial velocity. When the axial force is compression, the dynamic properties of the sandwich beam depend on a critical velocity. Furthermore, the critical velocity increases as the compression increases. The effect of the axial velocity on the dynamic properties is complicated. When the axial velocity is small, the sandwich beam exhibits dynamic properties only when the axial force is tension. When the axial velocity is large, the natural frequency of the sandwich beam varies depending on whether the axial force is a tension or compression. In addition, the skin–core thickness ratio has negligible effect on the natural frequency. However, when the thickness ratio is small, the natural frequency decreases nonlinearly with increasing ratio.
For a constant axial force or axial velocity, the suppression capability of an MRF on the natural frequency nonlinearly increases with increasing magnetic field strength. However, increasing the axial velocity reduces the suppression capability. More importantly, the suppression capability is strong when the beam is under action of a tension and moves slowly; the maximum suppression ratio reaches 41.7%. The suppression capability is increased as the compression increases when the axial force is compression. However, when the axial force is tension, the suppression capability only slightly decreases with increasing tension. In addition, the suppression capability of the MRF is stronger when the axial force is tension than compression. The suppression capability decreases nonlinearly with increasing skin–core thickness ratio.
Footnotes
Academic Editor: Chi-man Vong
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant nos. 51578347 and 51608335), Natural Science Foundation of Liaoning Province (grant no. 2015020578), China Postdoctoral Science Foundation (grant no. 2016M591432), and the Thousand and Ten Thousand Talent Project of the Liaoning Province (grant no. 2014921045).