
Abstract
Diesel–natural gas dual-fuel engine has become a hot research topic in recent years because of its excellent power and economy. However, the reliability of the dual-fuel engine does not meet the requirements of practical application. The piston maximum temperature of dual-fuel engine easily exceeds the security border. Toward this, this article presents a relational model to real-timely predict the piston maximum temperature of dual-fuel engine. Specifically, some easy-measured engine indirect signals, including NOx emission, excess air coefficient, and engine speed, are employed as the model inputs. The piston maximum temperatures, as the only output, are acquired offline by finite element analysis in ANSYS. Support vector regression is employed to solve the prediction model parameters. Cross-validation is introduced to determine some intermediate variables formed in the process of building model. Experiments revealed that the proposed model produces satisfying predictions with deviations less than 7°C. Thus, this study provides an effective method to monitor the piston maximum temperature state of dual-fuel engine in real time.
Keywords
Introduction
Diesel–natural gas dual-fuel engine, which has excellent economic performance and keeps the advantages of diesel engine, has gained increasing concern in recent years.1–3 However, the use of diesel–natural gas dual-fuel engine is limited by some practical issues. To achieve good dynamic and economic performance, dual-fuel engines are usually required to run near the security border. Moreover, there exist some uncertainties in the combustion process and operating environment. For instance, the nature gas composition may vary in different regions, which leads to an imprecise control of diesel substitution rate. After running for a period of time, diesel–natural gas dual-fuel engines easily run out of the safe boundary. Notably, according to the practical applications and bench experiments, we find that the main issue suffered from the dual-fuel engine is the piston thermal load problem rather than the knock. 4 The piston maximum temperature (PMT) always exceeds the security border (for the engine in our experiment, the security border is set to 350°C) before knocking in dual-fuel engine. Therefore, it is essential to monitor the PMT state of dual-fuel engine real-timely.
Numerous measurement techniques have been developed to acquire the piston temperature, such as templug method,5,6 electrical contact method,7,8 memory type method, 9 wireless telemetry method,10–12 and optical method.13,14 But each measurement method has its own shortcomings and is not suitable for online monitoring. Templug method and memory type method are not online measurement methods. The piston temperature cannot be observed until the templugs or memory chips have been taken out from the piston. The electrical contact method makes a great modification to the engine and has short fatigue life. The wireless telemetry method and optical method are not suitable for commercial practice due to their high cost. Additionally, most of the measurement methods are used to measure a few point temperatures of piston. The PMT is hard to be observed from these methods. Finite element analysis is another effective method to acquire piston temperature.15,16 The piston temperature field is calculated by the finite element analysis in ANSYS and checked by several temperature sensors mounted on the top of piston. The PMT can be observed from the calculated piston temperature field. But this is also not a real-time method and not applicable for on-vehicle applications.
An alternative approach is to real-timely predict PMT using some engine indirect signals. According to previous studies, 17 PMT mainly depends on the cylinder temperature and the cylinder heat transfer coefficient. High cylinder temperature is the main cause of NOx generation. 18 The excess air coefficient has a strong influence on the whole combustion process which determines the cylinder temperature.19,20 The heat transfer coefficient is mainly determined by the engine speed and the cylinder pressure. 21 Therefore, there is close relationship between PMT and these engine indirect signals, namely, NOx emission, engine speed, and excess air coefficient. Inspired by this, we propose a model to characterize the relationship between these indirect signals and PMT and use the model to predict PMT values in real time. Meanwhile, the proposed model is simple and can be easily embedded into electronic control unit (ECU) for online realization.
In low-speed and high-load working conditions, the turbocharger of dual-fuel engine cannot provide enough intake, resulting in low excessive air coefficient, which will easily bring the serious problem of piston thermal load. In medium- or high-speed zone, the turbocharger is well boosted and there is enough air inducted into the cylinder. This means the combustion is much leaner and its corresponding PMT is low. For simplicity, the article just focuses on the low-speed and high-load working conditions.
The article is organized as follows. Section “Online PMT prediction method” describes PMT prediction method, including prediction process, model solving algorithm, and offline acquisition method of PMT. Experiment setup is described in section “Experiment setup.” Experiment and results are presented in section “Experiment and results.” Discussion is described in section “Discussion.” Section “Conclusion” provides some brief conclusions.
Online PMT prediction method
Figure 1 illustrates the process of PMT online prediction. The critical issue of PMT prediction is to gain an accurate prediction model. A large number of bench experiments are carried out to produce the training data for training model. In the proposed model, we employ NOx emission, excess air coefficient, and engine speed as the inputs which are measured by relevant sensors. The PMTs are observed from the piston temperature field calculated by finite element analysis with ANSYS. Support vector regression (SVR)22–24 is employed to solve the model parameters based on the training data. Notably, before solving the model parameters, some intermediate parameters, such as kernel parameters and penalty factor, are needed to be determined. In this work, cross-validation is introduced to ascertain these parameters.25,26 Subsequently, the well-trained prediction model is embedded into the engine ECU. In practical operation, the measured NOx emission, excess air coefficient, and engine speed are read by the ECU, and the PMT is predicted by the proposed model in real time.
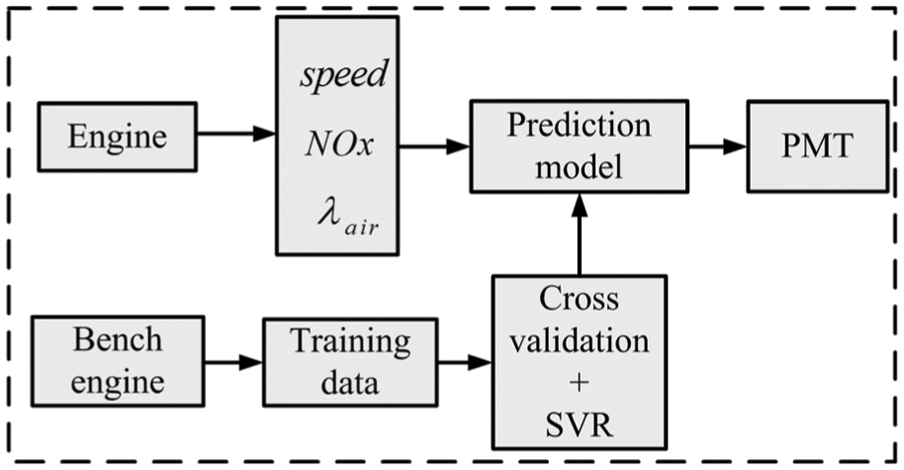
Online prediction method of PMT.
Model solving algorithm
SVR
Support vector machine (SVM) was developed by Vapnik and colleagues.27,28 It is widely used for classification and regression and has shown superior performance with small, nonlinear, and high-dimensional data sets compared to the other machine learning algorithms. The theoretical foundations of SVM are Vapnik-Chervonenkis dimension theory and the criterion of minimizing structural risk which is composed of empirical risk and confidence interval. “Over-learning” can be avoided by minimizing structural risk in SVM. SVR is used to deal with the regression issue and inherits all advantages of SVM. 24 Given a set of training data


A regression model

where



The soft margin loss setting for a nonlinear SVR.
By introducing the Lagrange function and Kuhn–Tucker conditions, we obtain the dual constrained function
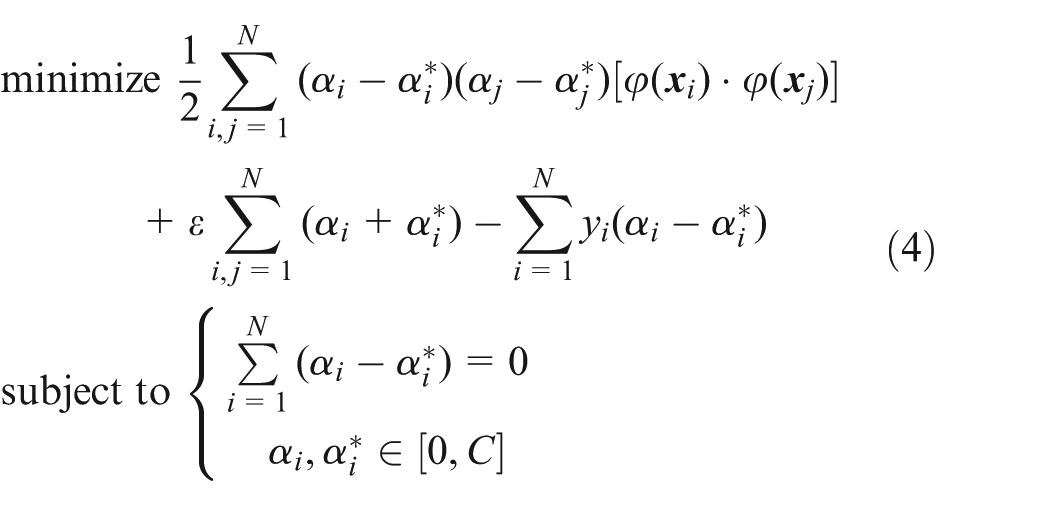
where

Here
Common kernel functions.

Cross-validation
The performance of the prediction model is largely influenced by the kernel parameters, penalty factor C and insensitive coefficient ε, and thus these parameters should be carefully chosen. In this work, the K-fold cross-validation is employed to determine these parameters. Specifically, these parameters are divided into several groups first. For each group of parameter, the training set is specially divided into K groups. One group is chosen as the validating set, and the other K−1 groups are used as training set to solve the model parameters. Thus, K possible prediction models and corresponding K validating errors are obtained for each group of parameter. The cross-validation error is acquired by averaging the K validating errors. The optimal parameters are chosen by minimizing the cross-validation error. The process of fivefold cross-validation is shown in Figure 3. The black part is validating set and the gray part is training set.

Illustration of the fivefold cross-validation.
Offline PMT acquisition method
It is necessary to acquire a large number of PMTs for training prediction model. Figure 4 shows the process of PMT acquisition method. The piston solid model is built by Pro/e software and then imported into ANSYS software to create the finite element model of piston. The thermal boundary conditions of piston top depend on the cylinder average temperature and the cylinder average heat transfer coefficient which are calculated by equation (6)

where
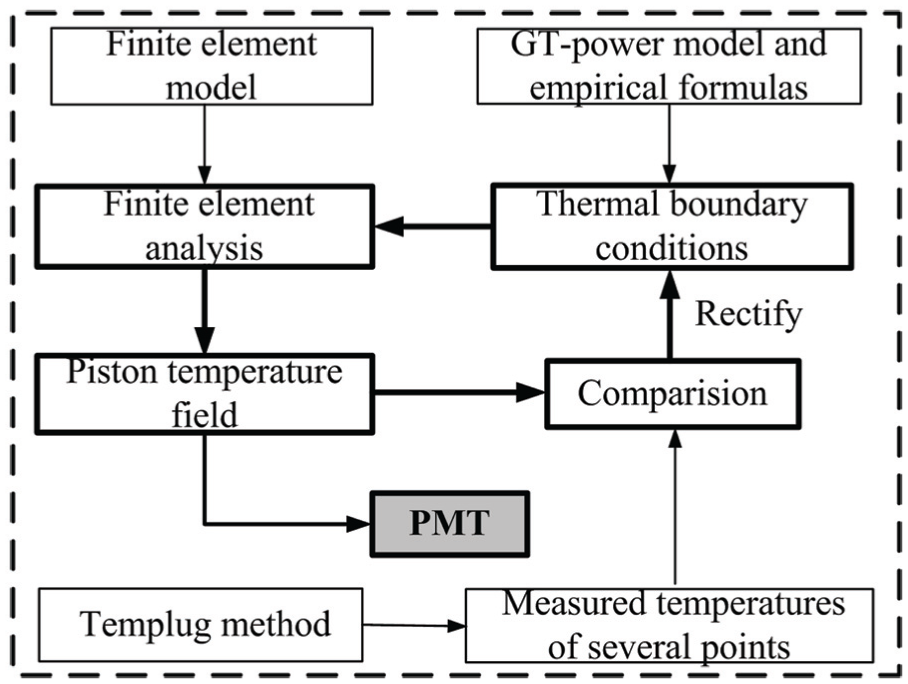
Offline acquisition method of PMT.
Experimental setup
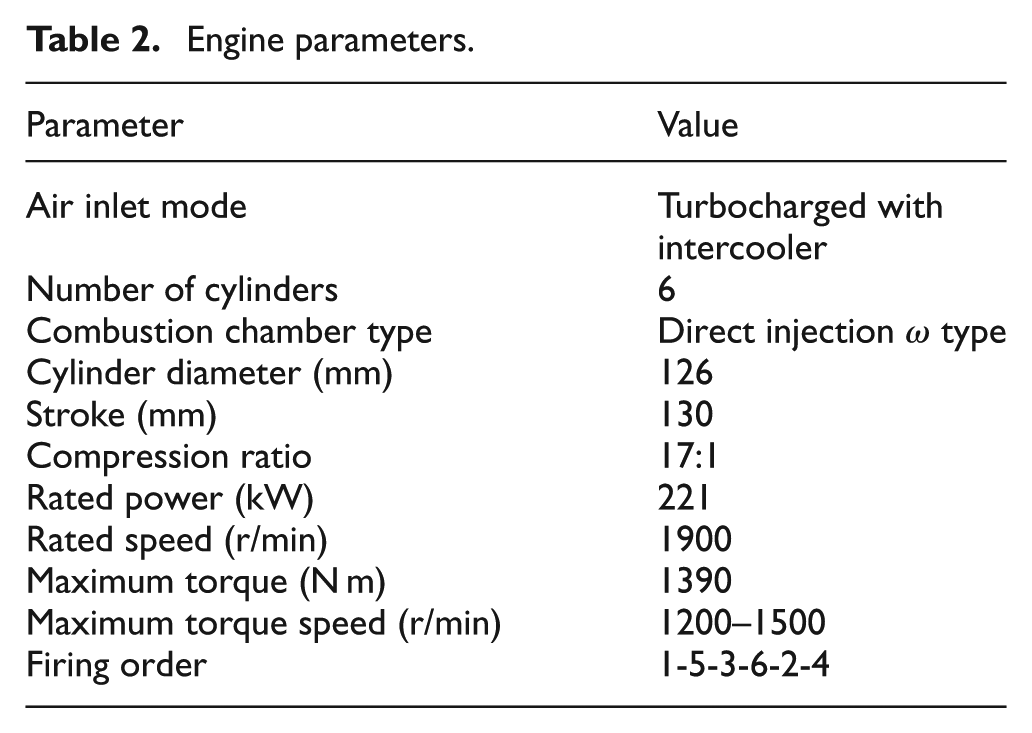
All experiments are conducted on a diesel–natural gas dual-fuel engine which takes the diesel engine WP10.300E40 as its prototype engine. The main technical data of diesel engine are summarized in Table 2. The dual-fuel engine and its control system shown in Figure 5 are developed by our laboratory. Compared to the original diesel engine, the dual-fuel engine complements a natural gas supply system equipped with six gas nozzles. The natural gas is mixed with the air by a mixer, and the mixed gas is inducted into the cylinder through the intake port. This is actually mono injection which can largely lower the likelihood of appearing cylinder-to-cylinder fuel imbalance. Additionally, the dual-fuel engine introduces a mode switcher to switch the engine working mode which contains single-fuel mode and dual-fuel mode. During the single-fuel mode, diesel nozzles are completely controlled by the diesel ECU, while the dual-fuel ECU does not work. During the dual-fuel mode, the output pulses of diesel ECU are not loaded into the diesel nozzles but loaded into the physical simulator. Subsequently, the total fuel command pulses issued from diesel ECU are captured by this physical simulator, and the dual-fuel ECU directly read the total fuel command from the physical simulator, which avoids re-development of the extremely complex torque-based control strategy. Based on the captured total fuel, the dual-fuel ECU outputs drive pulses to control the diesel nozzles and the natural gas nozzles.
Engine parameters.
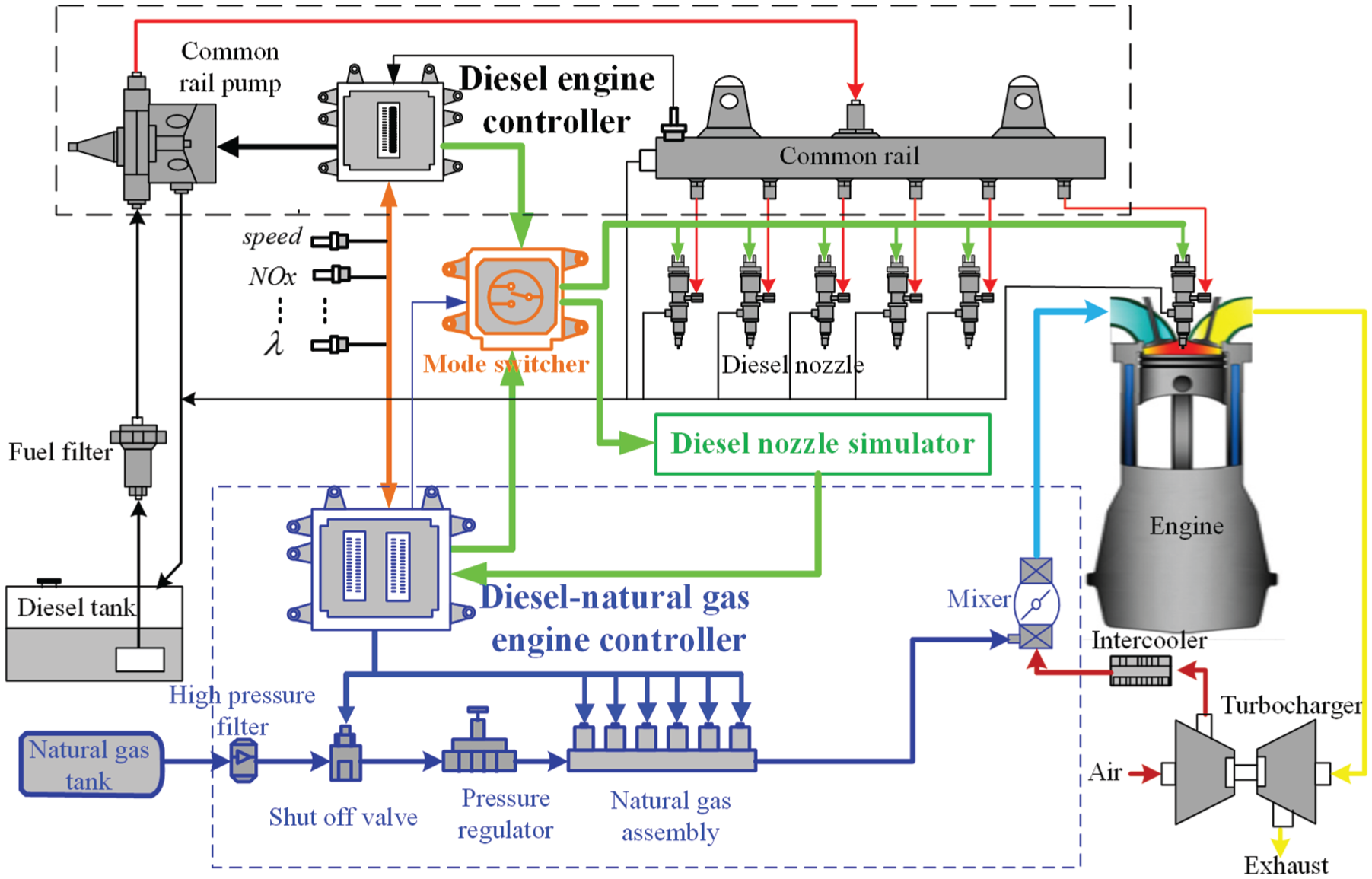
Diesel–natural gas dual-fuel engine control system.
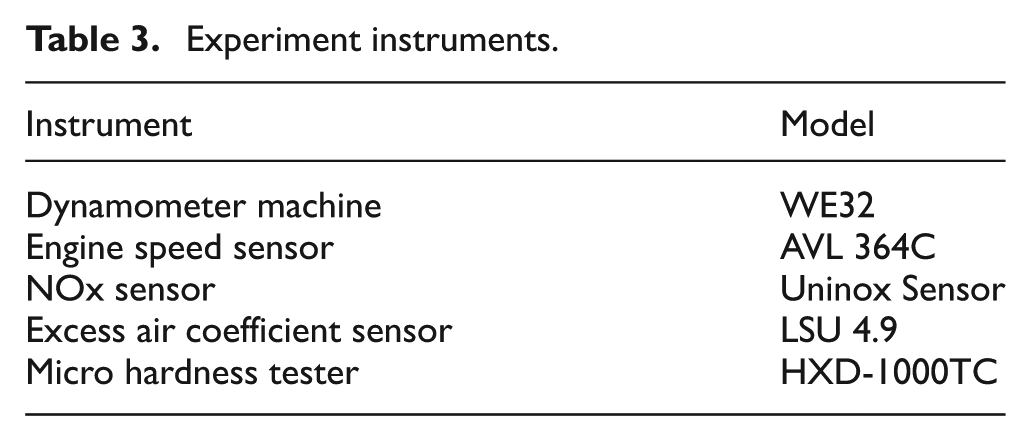
The major experiment instruments are listed in Table 3. NOx emissions are measured by Uninox sensor. LSU 4.9 is used to measure excess air coefficients. Engine speeds are measured by optical encoder AVL 364C. A total of 10 temperature plugs are screwed into the piston top surface for measuring piston-point temperatures. The distribution of measured points is shown in Figure 6. HXD-1000TC is employed to measure the hardness of templug.
Experiment instruments.

Measured point distribution.
Experiment and results
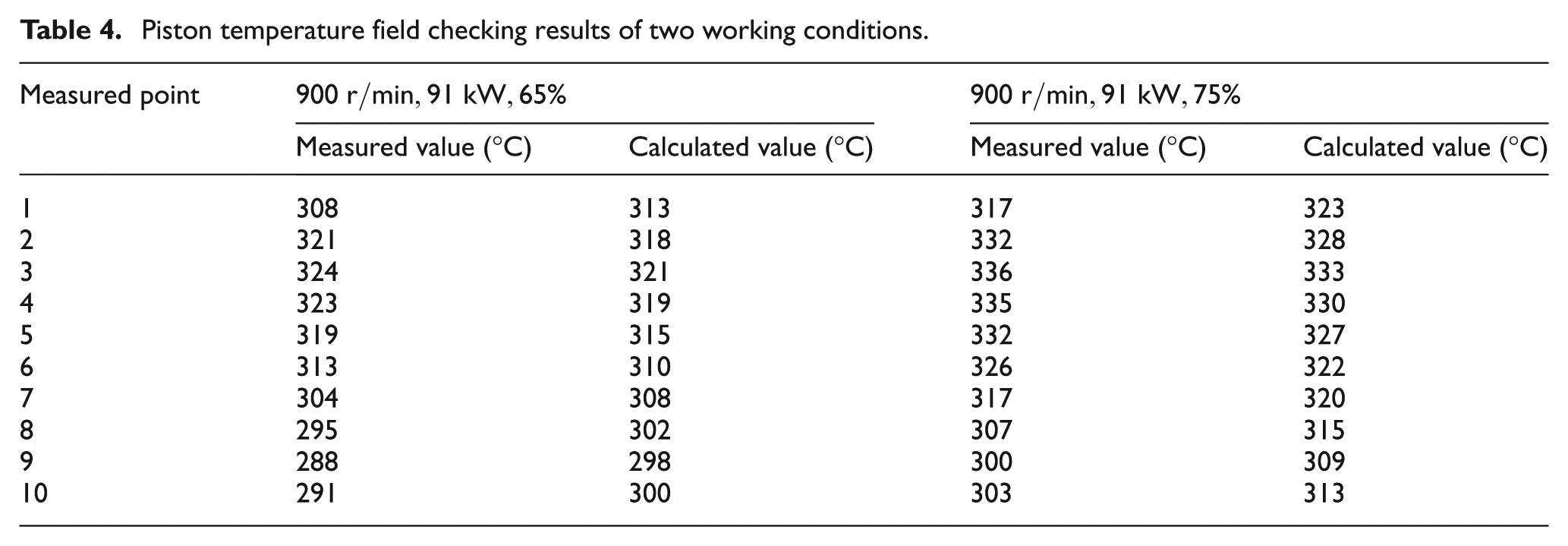
Bench experiments of dual-fuel engine were carried out under 160 different low-speed and high-load working conditions. Engine speed ranged from 700 to 1000 r/min, load condition ranged from 85% load to full load, diesel substitution rate ranged from 60% to 90%. NOx emissions, engine speeds, and excess air coefficients were measured by relevant sensors. In all, 10 piston-point temperatures were measured via 10 temperature plugs. The piston thermal boundary conditions were repeatedly revised based on these measured temperatures. There is too much work to revise piston thermal boundary conditions of every working condition. The article has only revised piston thermal boundary conditions of 16 typical working conditions, and the thermal boundary conditions of the other ordinary working conditions were interpolated with reference to these revised piston thermal boundary conditions. Piston temperature fields were calculated by finite element analysis in ANSYS, and PMTs were observed from piston temperature fields. These calculated piston temperature fields were also checked using templug method under some working conditions. Table 4 shows the check results of two ordinary working conditions. It is clear that the difference between the simulation and measurement is negligible, especially in the high-temperature points. Hence, the piston temperature field calculation method is feasible and the PMTs observed from piston temperature fields are available.
Piston temperature field checking results of two working conditions.
Finally, 160 groups of NOx emission, excess air coefficient, engine speed, and their corresponding PMT were obtained. Table 5 lists several groups of these data. As illustrated in Table 5, it is clearly seen that the PMT will easily exceed the security border when the diesel substitution rate is too larger. Additionally, the PMT is positively correlated with the NOx emission and the engine speed and is negatively correlated with the excess air coefficient. Motivated by above results, NOx emission, excess air coefficient, and the engine speed are employed as the inputs of PMT prediction model.
Several groups of experimental data.

The article chose 60 groups of data as the training set. The other 100 groups of data were used as the test set. Notably, all data were normalized by min-max way to ensure all variables in the same order of magnitude. The normalized training set was employed to train the PMT prediction model. But some intermediate variables, namely, kernel parameters, penalty factors, and insensitive coefficient, need to be determined before solving model parameter, and the article introduced 10-fold cross-validation to ascertain them. Table 6 lists the optimal parameters and the cross-validation errors corresponding to three prediction models which choose linear kernel, polynomial kernel, and radial basis kernel as its kernel function, respectively. It can be seen that linear model has a more simple structure compared to the other models, but its cross-validation error is much larger than that of other models. It indicates that linear model has the worst performance when predicting samples that are not in training set. The radial basis model produces a satisfying cross-validation error with 11.05°C. However, the complexity of radial basis model increases with the number of support vectors increases because of the introduction of gauss function, which results this model is not applicable for online realization. By compromising model complexity and cross-validation error, the article chooses the polynomial model as the prediction model. Subsequently, the final polynomial model was trained using the whole training set, and the model parameters were estimated based on the SVR theory.
Cross-validation results of different prediction models.

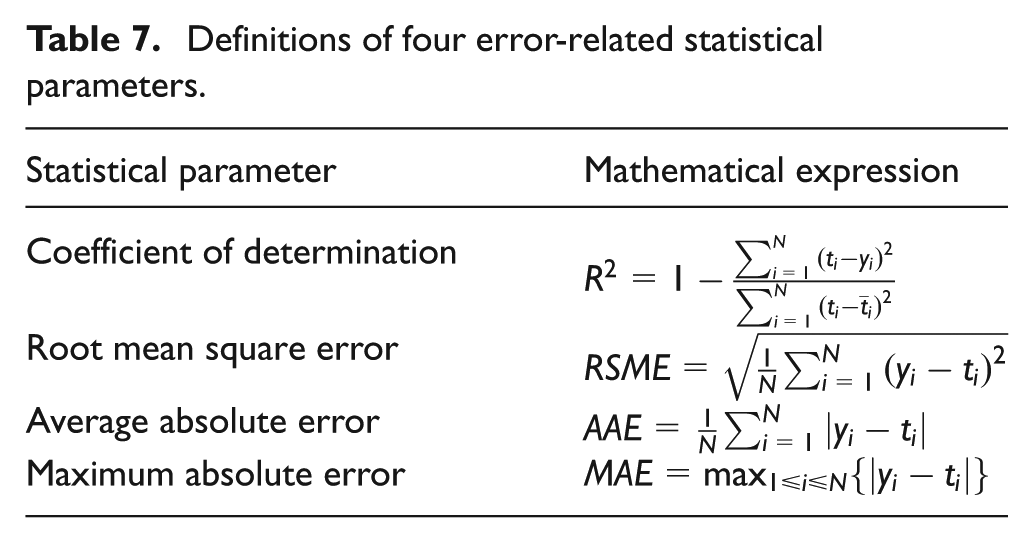
In order to verify the reliability and accuracy of the model, four statistical parameters, which contain coefficient of determination (R2), root mean square error (RMSE), average absolute error (AAE), and maximum absolute error (MAE), were introduced as performance metrics. Table 7 lists the definition of each statistical parameter, where
Definitions of four error-related statistical parameters.
Above well-trained polynomial model was applied to predict the PMT of test data. Figure 7 shows the corresponding prediction results. The black line is the zero-error line, which indicates that the predicted value equals the observed value precisely with no error. As seen from Figure 7, the polynomial model produces a near −1

Prediction result of polynomial model.
Discussion
In order to verify the rationality of the model selection, we further trained another two prediction models (i.e. linear model and radial basis model) utilizing the whole training set, and then employed them to predict the PMTs of the test set. The prediction results, in Figure 8, show that the linear model produces a poor prediction with smaller

Prediction results of (a) linear model and (b) radial basis model.
To demonstrate the input variable selection rationality, the polynomial models removed one of input variables were trained utilizing the training set and verified by the test set. Figure 9 shows the test results. As shown, the model removed engine speed produces extremely poor prediction with

Prediction results of polynomial models using different inputs: (a) input variable:
Conclusion
In practical operation, diesel–natural gas dual-fuel engine often suffers piston thermal load problem and the PMT easily exceeds the security border under low-speed and high-load working conditions. A polynomial model was successfully developed to predict the PMT of diesel–natural gas dual-fuel engine. The main conclusions are summarized as follows:
There is a strong correlation between the PMT and some easy-measured engine indirect signals which are composed of NOx emission, engine speed, and excess air coefficient.
Finite element analysis was employed to acquire the PMTs for training model, and experiments revealed that this method is feasible and yields high-precision PMTs.
By compromising model complexity and cross-validation error, the article chose the polynomial kernel to train the prediction model based on the SVR theory. Experiments revealed that the proposed model produces a desirable prediction and has a simple structure for online implementation.
The article employed NOx emission, engine speed, and excess air coefficient as the model input to predict the PMT. Experiments showed that each input has an effect on the prediction, so each input is essential for the prediction model.
Footnotes
Appendix 1
Acknowledgements
The authors thank Mr Shen and Mr Liu from Jiaxing Teou Gas Equipment Co. Ltd for their help in collecting data.
Academic Editor: Nicolas Garcia-Aracil
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Natural Science Foundation of China (NSFC) under Grant No. 61174135.