
Abstract
In this article, the problem of asymptotic attenuation and rejection is investigated for a class of cascade systems with general periodic disturbances via a non-linear disturbance observer and
Keywords
Introduction
Periodic disturbances widely exist in many practical systems, for example, harmonic disturbances in power systems and non-linear vibrations in mechanical systems.1,2 The existence of periodic disturbances always results in adverse effects on the control performance of a closed-loop system. Anti-disturbance control has been a key topic in control system fields in the past decade. At present, many elegant approaches have been proposed to attenuate and reject periodic disturbances,3–7 including the non-linear disturbance-observer-based control (NDOBC) method,8–13 non-linear output regulation theory14–16 and adaptive control scheme.17–22 The key idea of many of these methods is to use the desired feedforward input terms to cancel periodic disturbances.
In recent years, the asymptotic rejection of general periodic disturbances has received more and more attention.23–27 In Ding,
24
the asymptotic rejection of general periodic disturbances for non-linear systems is developed, in which an approach based on integrations over half of the disturbance period is proposed to estimate disturbances. An adaptive tracking control problem is presented for non-linear systems with general periodic disturbances in Xu and Xu,
27
where the control scheme can only guarantee that the tracking error converges to zero in the sense of
In the above-mentioned literature, the systems are assumed to be subjected to just one kind of general periodic disturbance. However, in practice, the systems are always subjected to multiple disturbances, for example, external disturbances, internal noise and modelling error. In order to enhance the control accuracy of systems with multiple disturbances, composite hierarchical anti-disturbance control (CHADC) strategies are proposed in Guo and Cao.
28
The main idea of CHADC is that a disturbance observer is designed to estimate disturbances generated by an exogenous system, and the disturbance estimation used in feedforward compensation plus conventional feedback control methods, such as
In this article, we investigate the problem of asymptotic attenuation and rejection for a class of cascade systems with general periodic disturbances via a non-linear disturbance observer and
The main contributions of this work are listed as follows:
A CHADC strategy is proposed for a class of cascade system with multiple disturbances for the first time.
The systems considered in this article have two kinds of disturbances, that is, general periodic disturbances generated by a linear uncertain system with a non-linear output function and norm-bounded disturbances which can be regarded as an extension of the previous references.
A novel disturbance observer is designed to estimate the general periodic disturbances.
Problem formulation and preliminaries
Consider the following cascade systems



where
The structure diagram of the system is given in Figure 1.

The structure diagram of the system.
Assumption 1
The disturbance

where
Remark 1
In assumption 1, the disturbance is modelled as a linear system with a non-linear output function, which can represent many kinds of disturbances, for example, constant disturbances, harmonic disturbances and non-harmonic disturbances.
Remark 2
Many disturbance-observer-based control methods are proposed to reject the periodic disturbances described by a linear system with a linear output function.8,9,29,32 However, some disturbance signals cannot be modelled by a linear system with a linear output function but can be described as system (4), such as a trapezoidal wave and triangular wave. In order to extend the application of the disturbance-observer-based control method, we design a novel disturbance observer to estimate the disturbance in equation (4) in this article.
Remark 3
An internal model design method has been developed to reject the disturbances described by a linear system with a non-linear output function in Ding, 26 in which the disturbance model does not contain any uncertainties. In this article, we consider the disturbances with an unmodelled error and system perturbations in the disturbance model (4).
In this article, we make the following assumptions to analyse the stability of the closed-loop system.
Assumption 2
The non-linear function

where U is a given constant weighting matrix.
Assumption 3

Assumption 4
There exists a smooth positive-definite function

Assumption 5
Composite anti-disturbance control for the case with a known non-linear function
In this section, we first assume that the non-linear function

where L is the observer gain, and
The composite controller is designed as

where
Remark 4
The composite controller (6) includes two parts: one part is the negative of the output of the disturbance observer, and the other part is the conventional state feedback control law. It is obvious that the aim of the term
Letting

By applying the controller (6) to the system




where

Remark 5
The disturbance
Remark 6
In the composite control method, the conventional
Before presenting the main results, a definition is formulated.
Definition 1
Given a scalar
The system
Under zero initial conditions, there exists
To analyse the stability of the closed-loop system
Theorem 1
Consider the system (
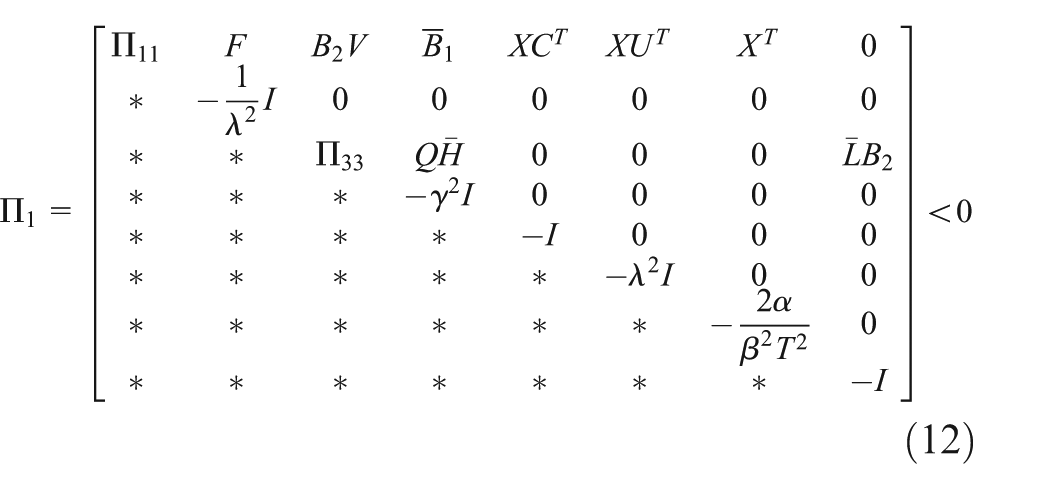
where

Moreover, the desired controller and observer gains are as follows

Proof
Choose the Lyapunov function as

where

From assumptions 3 and 4 and equation (8), we have

Based on equations (9) and (10), we can obtain
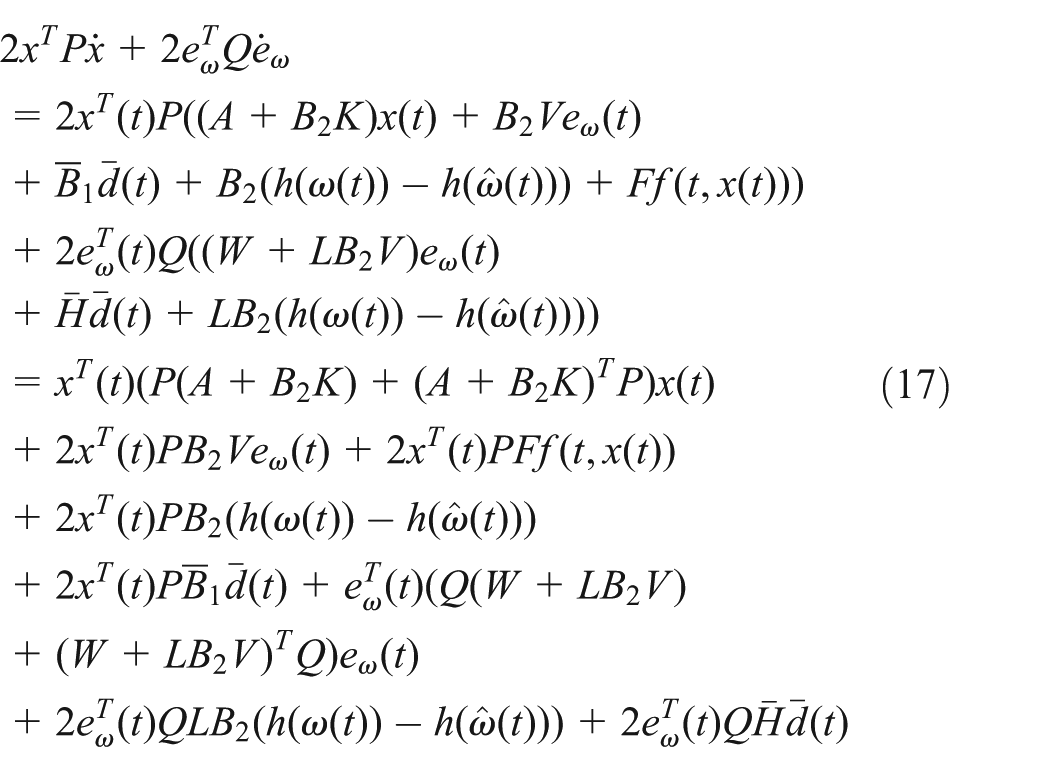
Then, one obtains

According to the characteristics of the non-linear function


From equations (15)–(20), we have
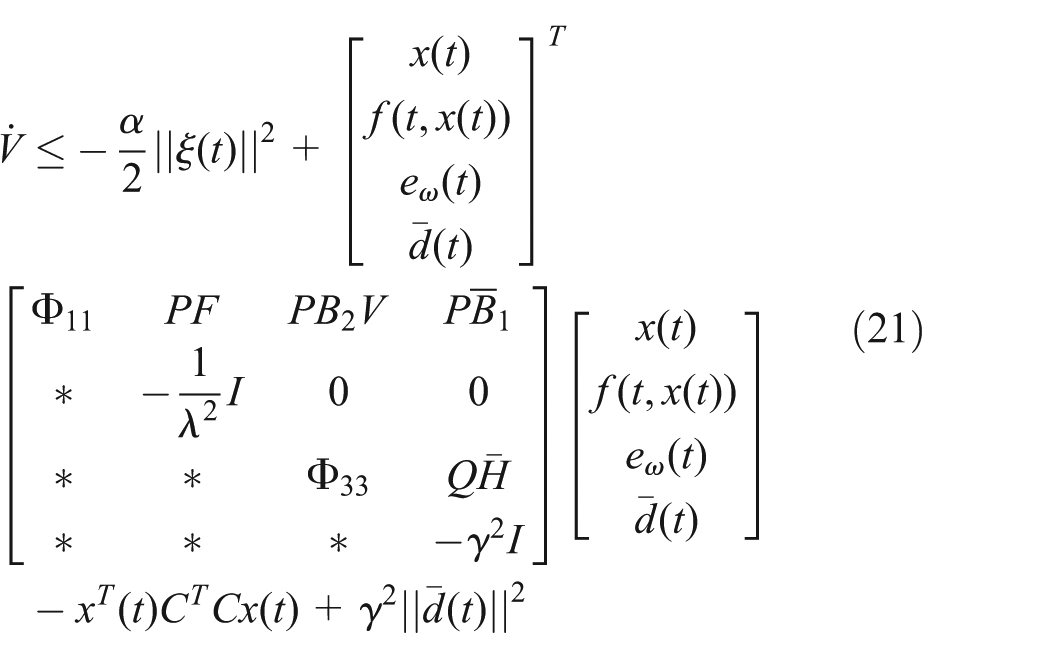
where

Consider the following performance index

Under zero initial conditions, we have
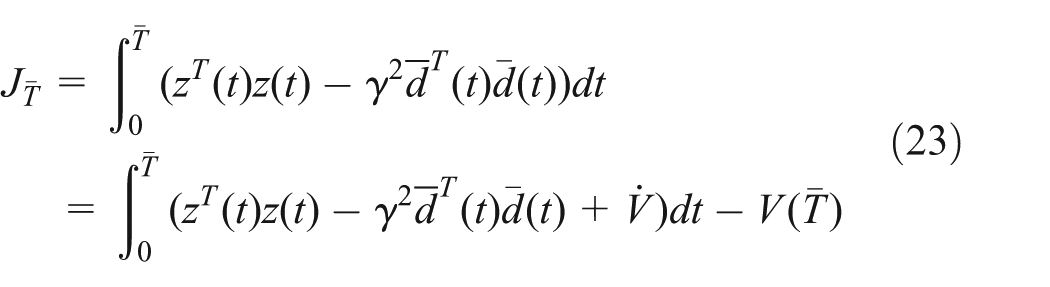
According to equation (21), we obtain

The combination of equation (12) and the Schur complement formula yields

where

By performing a congruence transformation of equation (25) by

Therefore, we have
In addition, when

According to equation (26), we have

Then, the closed-loop system is asymptotically stable when
Composite anti-disturbance control for the case with an unknown non-linear function
In this section, we consider that the non-linear function
The non-linear disturbance observer is developed as follows

where L is the observer gain and
The disturbance estimation error system is described as

By applying the controller (6) to the system




where

Remark 7
Compared with the error system (10), the disturbance estimation error system (33) contains a non-linear function
Theorem 2 presents the asymptotical stability of the system
Theorem 2
Consider the system (
where

Proof
By comparing the system matrices in equations (31) and (34) with the system matrices in equations (8) and (11) and following similar arguments for the proof of theorem 1, we can readily obtain theorem 2.
Numerical and application examples
In this section, a numerical example and a practical application to the linearised model of the longitudinal dynamics of an aircraft are provided to show the effectiveness of the main results in this article.
Example 1
The system matrices in the system

The parameters of system (4) are

Suppose
Our aim is to design composite controllers for the case with known and unknown non-linearities such that the closed-loop system is asymptotically stable and satisfies the prescribed
Case 1. The non-linear function
By solving the linear matrix inequality (LMI) in equation (12), the gains of the controller and observer are given by

Assume that
The response curves of the system states are shown in Figure 2, which demonstrates that the proposed method disturbance-observer-based control plus
Case 2. The non-linear function
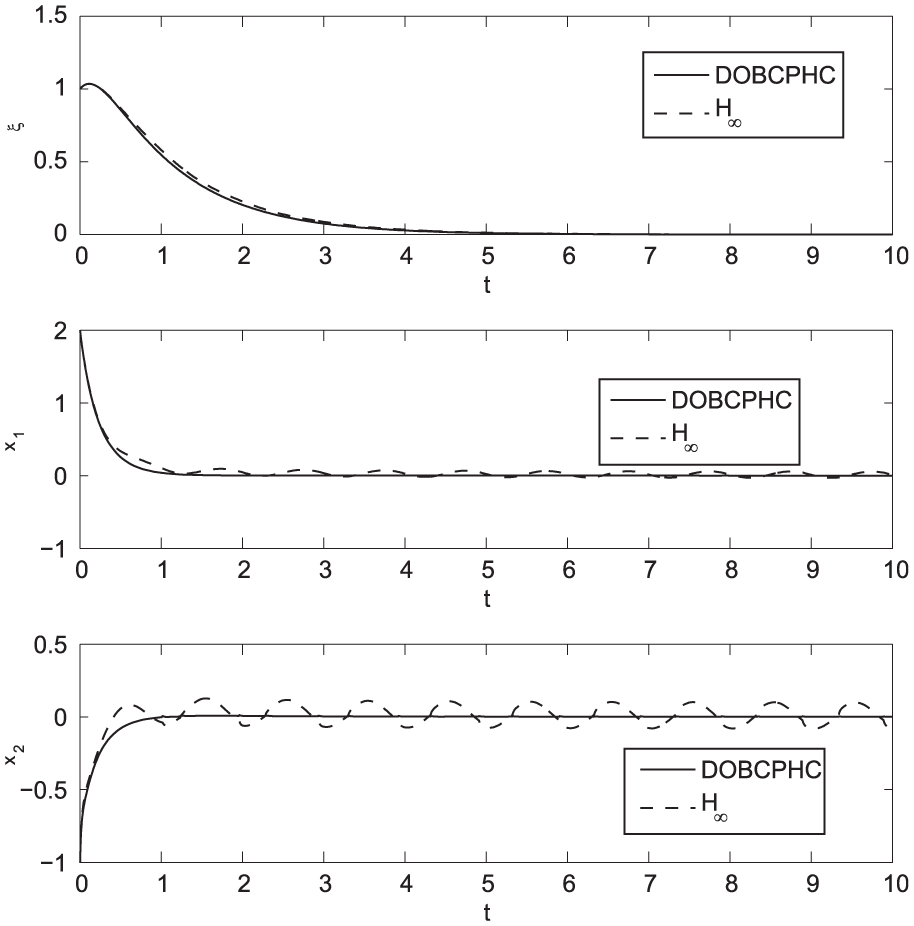
Response curves of system states.
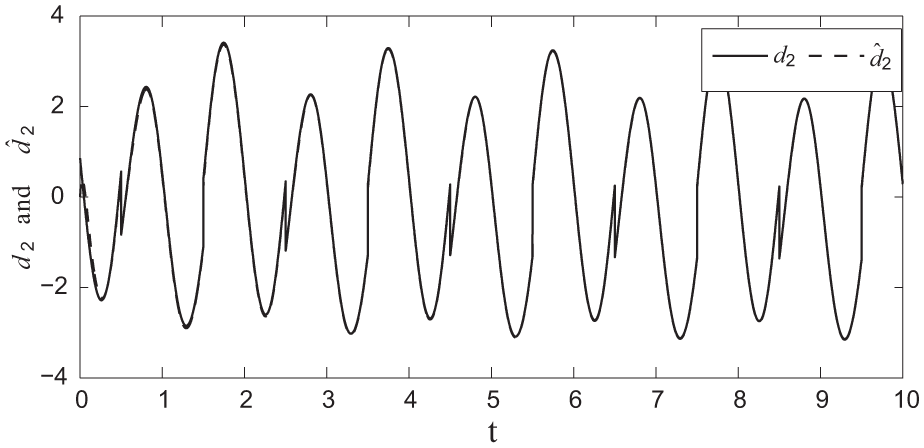
Curves of disturbances

Curve of output z.
We resort to the LMI toolbox to solve the LMI in equation (35); the gains of the desired controller and observer are

In contrast to case 1, we assume that the non-linear function

Response curves of system states.

Curves of disturbances

Curve of output z.
Example 2
Consider the following linearised model of the longitudinal dynamics of an aircraft in Heck and Ferri.
36
The states are the angle of attack


Thus, we have

The parameters of system (4) are

By choosing

Choose the initial value as
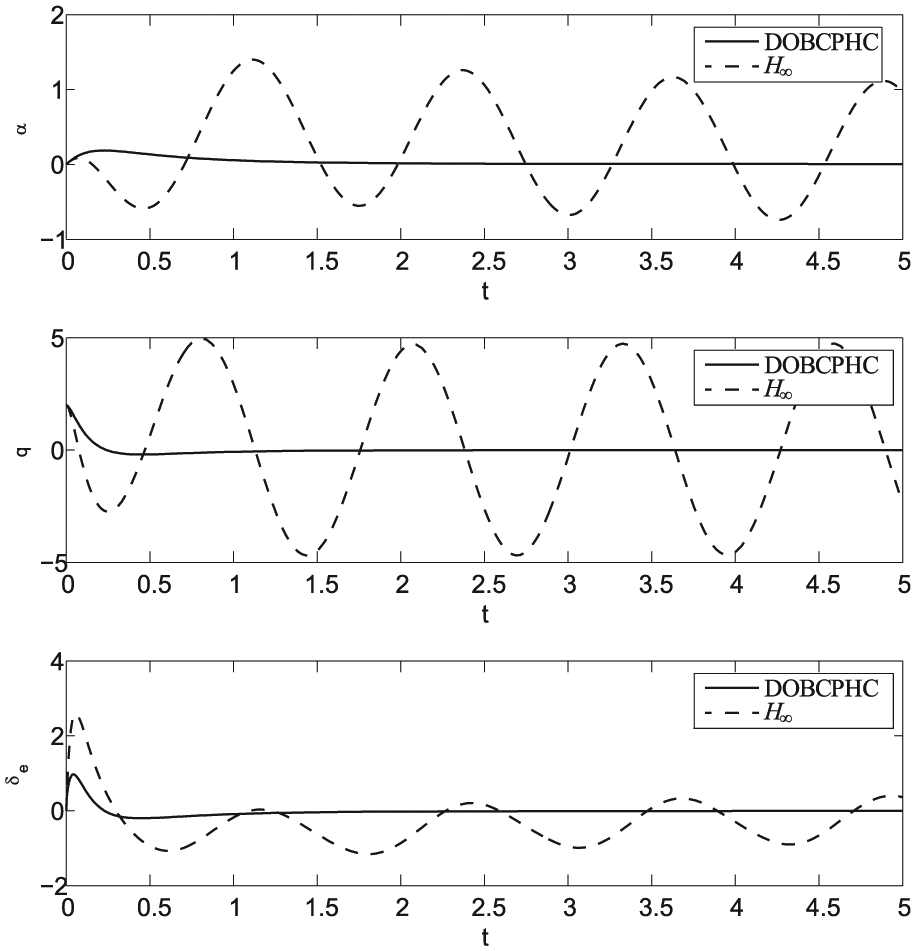
Response curves of system states.

Curve of output z.

Curves of disturbances
Conclusion
In this article, asymptotic attenuation and rejection for a class of cascade systems with general periodic disturbances has been investigated via non-linear disturbance observer technique and
Footnotes
Academic Editor: Chenguang Yang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (nos. 61403227 and 61503189), Natural Science Foundation of Shandong province (no. ZR2016FQ09), Specialized Research Fund for the Doctoral Program of Higher Education (no. 20133705120004), Project supported by the Zhejiang Open Foundation of the Most Important Subjects, Research Plan for Application Base and Advanced Technology of Tianjin (no. 15JCQNJC04200), The Open Fund of Key Laboratory of Measurement and Control of Complex Systems of Engineering, Ministry of Education (no. MCCSE2016A04).