
Abstract
The article deals with a formal approach to solving manufacturing problem with defects removal and presents the application of this approach to flow-shop system with defects. The defects are detected during quality control and thus they are unexpected events. Moreover, a job processing time is not predetermined, and it may contain the unknown time needed to repair. Therefore, stochastic uncertainties are considered, but in addition, we model the process of decision making. The algebraic-logical meta-model methodology constitutes the basis for our approach. A hybrid algorithm for constructing a solution based on the process simulation using special local optimizing task and algebraic-logical models switching when defect detection occurs is presented. In particular, the following elements of the presented approach are shown: disturbances type analyzing, definition of switching states set, definition of subproblems, algebraic-logical meta-models creating for all subproblems, switching types determining, determination of the switching rules, the switching function, and components of special local criterion definition. The article shows results of computer experiments.
Keywords
Introduction
The article presents formal approach to solving manufacturing problem with defects removal, especially flow-shop problem. The defects are detected during quality control and thus they are unexpected events. Moreover, job processing time is not predetermined. In the presence of quality defect, it contains the unknown time needed to repair because it depends on the size of defect, and in each case it may be different for the same job. Therefore, stochastic uncertainties are considered, but in addition, we model the process of decision making.
Moreover, stochastic uncertainties are considered, but in addition, we would like to model decision-making process connected with assignment of the tasks with defect to repair. Thus, it is not stochastic scheduling, because not only processing time is stochastic but also we deal with additional operation of defect repairing (only when the defect is detected). It should be noted that our approach takes account of the stochastic uncertainties as well as allows to model the process of decision making. Moreover, the application of our approach allows to optimize the time of machine usage and in this way to save resources and energy with a consequent cost and emissions of greenhouse gas reduction.
We consider flow-shop manufacturing problem in which there are quality control for the defects detection, removal of the manufacturing quality defects on an additional repairing machine, and job re-treatment in part or all technological routes. Moreover, deadline is determined for some or all jobs. The execution orders in powder coating plant are an example of the problem that belongs to considered class of problems. Manufacturing process of painting details is as follows. There are five workstations: chemical bath, dryer, powder coating booth, curing oven, and packing. Each detail passes through the all workstations step by step. Checking the quality of painting execution is after heat treatment in curing oven. As a result of quality control, the defective elements should be repaired. For this purpose, additional operation should be done, that is, powder coating must be removed. Therefore, the operation on each of five workstations is repeated.
Our approach to solving this problem is a combination of the searching algorithm with a special local criterion and algebraic-logical models switching. So far, the searching algorithm has been used to determine the deterministic problem solution on the basis of discrete process simulation. Switching method allows to present a problem using two simple models and switching function, which specifies the rules of using these models. A combination of those methods allows to solve non-deterministic problems. Our approach is based on algebraic-logical meta-model (ALMM) when the idea of an ALMM paradigm was proposed and developed by E Dudek-Dyduch. Using ALMM approach allows to reconstruct the process of decision making as well as to monitor and track decisions during the manufacturing process.
This article constitutes summary and extension of our previous works mainly related to problem modeling and representation. In particular, the papers1,2 present a general form of switching method, ALM models and definition of the switching functions, and the switching algorithm for the flow-shop system with defects and one additional repairing machine. The paper 3 proposes a combination of switching models method and an optimization method to solve the considered problem. The results of experiments examine the cost of algebraic-logical models switching operations, and the impact of the number of defect repairs for execution time and the switching number between models were shown. In this article, we propose the general form of hybrid algorithm. We present in detail a complete example of solving the problem using hybrid algorithm, hence we provide the details of the problem analysis, the precise elements of the models, and the detailed stages resulting from the combination of two methods. In addition, the analysis of data changes depending on different kinds of disturbances that have been described. Moreover, detailed scheme of a hybrid algorithm for the flow-shop with defects problem and experiments comparing the obtained results with the reference solutions of the problem of flow shop is presented.
The presented approach differs from the concept of the modeling method for discrete manufacturing processes with disturbances described in Dudek-Dyduch,4,5 called a two-stage algebraic-logical model transformation method (2SALMT method). A parallel identical machine processes with job’s due dates were mentioned in these papers.
The article is organized as follows. In section “Motivation and background,” we present our motivation and an overview of the literature concerning existing approaches for solving scheduling problems, especially flow-shop system. In section “Flow-shop system with defects problem,” we describe the flow-shop manufacturing system with time limits, in which there are the quality control for the defects detection, removal of the manufacturing quality defects on an additional repairing machine, and job re-treatment in part or all technological routes. Section “ALMM approach for multistage decision process” includes a definition of a multistage decision process (MDP) according to ALMM methodology and its general application to non-deterministic polynomial-time (NP)-hard problems. In section “ALMM-based hybrid algorithm,” we present in detail the general form of hybrid approach including searching algorithm using special local optimizing task and the method of algebraic-logical models switching. Moreover, the hybrid algorithm is described. The elements of presented approach, i.e., types of disturbances analyzing, determining the set of switching states, definition of subproblems, ALM models creating for all subproblems, switching types specifying, determination of the switching rules, the switching function definition, and special local criterion determining for considered problem are given in section “Algorithm for flow-shop system with defects.” Section “Experiments and results” contains the results of computational experiments. The last section contains conclusions and future works.
Motivation and background
Our motivation is as follows. The task of scheduling is one of the most challenging problems, and the majority of real scheduling problems are known to be NP-complete or NP-hard in their general form. Different exact and approximate methods are used to solve them, such as mathematical methods (e.g. petri net, branch and bound, and integer programming), heuristic methods (genetic algorithms, Tabu search, simulated annealing, and nature-inspired metaheuristics), and other approaches such as agent methods.6–11 However, researchers are still searching for methods to decrease the complexity of computations in this field. Recently, the application of cellular automata to solve scheduling problems has been described in the literature. The adaptation of cellular automata to solve parallel scheduling problems was first described by Seredyński and colleagues,12–14 Vidica and de Oliveira, 15 and Draa and Meshoul. 16 The next proposition for using cellular automata to solve scheduling problems is described by M Abdolzadeh and H Rashidi 17 and Antczak et al. 18 In these papers, the application of cellular automata (CA) technique to solve job shop problems was presented. Solving scheduling problems using constraint programming (CP) is also very popular, especially in production scheduling, project planning, and transport problems.19–21 CP is very useful for NP-completeness problems where different strategies and heuristics have to be tested and also decision support is required.
Moreover, real manufacturing scheduling problems are also dynamic and subjected to a wide range of stochastic uncertainties, such as stochastic processing time and rush order. Therefore, the production scheduling under uncertainty has indeed attracted much attention in recent years.22–26 However, the considered flow-shop problem with defects is not equivalent to the flow-shop problem with stochastic uncertainties. The most important thing in considered problem is the detection of unexpected events when schedule is executed and the possibility of including in schedule data or parameter changes which come from the occurrence of the event.
In our approach, we use switching models method. This concept models appear in the scientific literature. Most methods are used in financial econometric and economics models (Markov chain, Markov-switching multifractal, and regime-switching models)27–29 or in sequential logic circuits. However, these methods are related to totally different problems than the considered flow-shop problems. Moreover, they do not allow to model decision-making process connected with the assignment of tasks with defect to repair. Such modeling is important and helpful in making decisions in real production systems.
Because in the considered flow-shop problem with defect removal we would like to reconstruct the process of decision making (not only obtain a solution taking into account the job stochastic execution time), we choose ALMM approach. Unfortunately, ALMM approach does not allow to change data during the process; thus, we propose to use ALM model switching method. To solve this type of optimization problem, we propose using hybrid algorithm, which includes searching algorithm with the special local criterion and the method of algebraic-logical models switching.
Flow-shop system with defects problem
In the article, we consider flow-shop manufacturing problem in which there are the quality control for the defects detection, removal of the manufacturing quality defects on an additional repairing machine, and job re-treatment in part or all technological routes. Moreover, deadline is determined for some or all jobs. Thus, the dedicated machines process a set of jobs. A job may consist of a single element up to k elements. When the job consists of more than one element, it can be divided into parts and the parts can be independently processed as new jobs. The stores in front of each machine (where job must wait to be processed when machine is busy) are considered as well as store for finished jobs. During the manufacturing process after the indicated treatment, there is a quality control performed always on the same indicated machine. A quality lack may be found for some part of the checking job in consequence of this control. Then, in manufacturing process, it is necessary to use additional operations of defects removal on additional machine. Job with defect is divided into two parts and considered now as new jobs. As a result of the job division, size of new jobs depends on the number of faulty elements and correct elements. A faultless job continues technological line operations, while job with a defect is directed to repairing machine. After the repair operation, all of technology route operations or part of them should be repeated for repaired items. Therefore, the total time of job execution is not known a priori, because the number of faultless job is unknown and it follows that the time needed for performing additional operations to correct defects is unknown. The goal is to schedule jobs, so that all the jobs are completed before its due date and when its quality is accepted. It should be noted that in this article, we consider one machine with quality control and one repairing machine.
We use the following notation to describe the considered problem. There is a set of
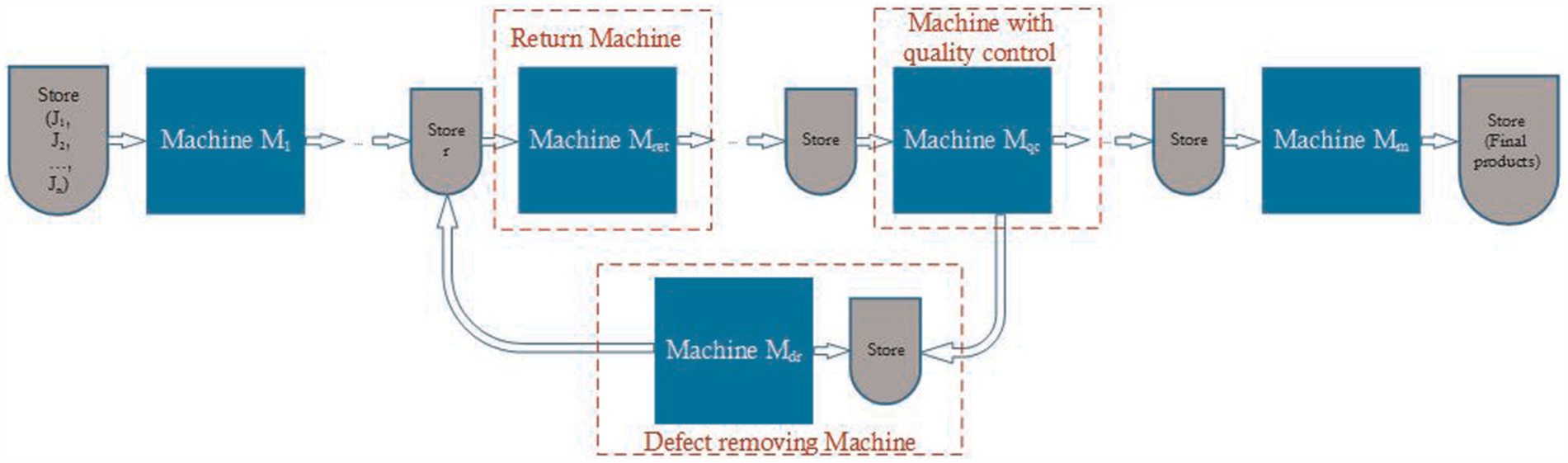
Flow-shop technology route with stores and a repairing machine.
ALMM approach for MDP
The idea of an ALMM paradigm was proposed and developed by E Dudek-Dyduch. The definition of ALMM of discrete deterministic process is inter alia in Dudek-Dyduch.30–32 According to ALMM methodology, a problem is modeled as a MDP together with optimization criterion Q. MDP is defined as a sextuple which elements are a set of decisions U, a set of generalized states
Transition function f is defined by means of two functions:
The optimization task is to find an admissible decision sequence
The advantages of ALMM are that values of particular coordinates of a state or/and decision may be names of elements (symbols) as well as some objects, for example, a finite set and sequence (thus they do not have to be numerical), and the set of possible decisions
The ALMM approach allows one to solve discrete optimization problems by finding optimal or suboptimal solutions. Based on ALMM methodology, the following general approach has been developed so far: method uses specially designed local optimization task and the idea of semi-metric,31,32 learning method uses the information gathered during a searching process, 33 method based on learning process connected with pruning non-perspective solutions, 34 and substitution tasks method 35 (a solution is generated by means of sequence of dynamically created local optimization tasks so-called substitution tasks).
In general, applying a formal approach ALMM is useful for a wide class of difficult (especially NP-hard problem) multistage decision problems, the parameters of which depend on the system state (e.g. the retooling time or resources depending on system state) and unexpected events during process (e.g. quality defect, lack of resource, and failure mode). This methodology allows to design algorithms and methods in a formal way, on a general level (high level of abstraction).
ALMM-based hybrid algorithm
Above-mentioned ALMM-based approach allows to solve non-deterministic discrete optimization problems which are modeled using algebraic-logical model. It is a combination of the searching algorithm with the special local criterion and the method of algebraic-logical models switching. The searching algorithm is used to determine the deterministic problem solution on the basis of discrete process simulation. Switching method is used when an occurrence of events during the process is detected and allows to present a problem using simple models and switching function, which specifies the rules of using these models. In the article, we develop the approach proposed in Kucharska et al., 3 which shows only one type of disturbance and switching between only two models, and now, the general hybrid algorithm form is proposed (section “Hybrid algorithm procedure”). Beforehand, let us recall the basic elements of this approach: searching algorithm with the special local criterion (section “Searching algorithm with the special local”) and ALM switching method (section “ALM switching method”).
Searching algorithm with the special local criterion
The searching algorithm belongs to the class of heuristic algorithms based on partial generation and searching of states graph and using local optimization. But, in basic form of those methods, local optimization was only based on minimization (maximization) of the local increase in quality criterion. Our algorithm consists of generation of consecutive solutions (whole trajectories started from the initial state
Local optimization of decision choice
The trajectory generation is connected with a choice of decision in subsequent states. Selecting the appropriate decision among all possible decisions in given state has a significant impact on the ability to generate an admissible and good quality solution and on the ability to generate an admissible solution faster. One way of selecting a decision at the u from a set of possible decisions in given state
Components related to the value of the global index of quality for the generated trajectory and consists of the increase in the quality index resulting from the realization of the considered decision and the value related to the estimation of the quality index for the final trajectory section, which follows the possible realization of the considered decision. This part of the criterion is suitable for problems which quality criterion is additively separable and monotonically ascending along the trajectory. 30
Components related to additional limitations or requirements. The components estimate the distance in the state space between the state in which the considered decision has been taken and the states belonging to the set of non-admissible states
Components responsible for the preference of certain types of decisions resulting from problem analysis. These subsets can be identified a priori, based on analysis of algebraic-logical model of problem or may be specified by the experts.
The basic form of the local criterion

where
Because the total quality index value Q is being minimized, the best
Local optimization criterion modification
Modifications may be subject to both a form of criteria and weights of coefficients. In the simplest case, the basic form of local criterion as well as weights of coefficients (a and b) can be established for one trajectory generation. But generally, they can be modified in the course of the same trajectory generation too. The modification (increase or reduction) of the coefficients during the generation of trajectory may appear when certain limitations and preference of certain types of decisions are more/less important or inactive in the given state of process. The modification of criterion form can occur when some limitations lose sense or some additional limitation or situation takes place. Both types of modification can occur automatically, based on previously defined rules. Regarding verification, it is important whether the modification should be done or not and whether it requires the minimum or possibly a small amount of calculation, for example, checking only one or a few coordinates of state. In fulfilling this requirement, it seems possible to reduce the calculations, the value of q which is implemented for each decision belonging to the set of possible decisions in the given state.
It needs to be highlighted that using a more complicated form of a local criterion and its modification should consider two opposing postulates. On one hand, more complicated criterion form usually includes more information and thus choice of decisions may be more beneficial—a chance of finding a better solution is greater. On the other hand, we must take into account the complexity and computation time of determining the value of a local criterion.
ALM switching method
The switching ALM method for flow-shop system with defects was proposed in Grobler-Dębska et al. 1 Let us recall it in short. This method is an approach to formal notation of problems in which some events that would influence job processing occur during the process execution and comes from a conception of control of discrete manufacturing process in the failure mode proposed by H Sękowski and E Dudek-Dyduch. 36 A detection of defect in produced element, that is, irregular application of paint on a painted element, bad balance of springs in mattress, and backfilling of the hollow headings in a mine may cause such events. Usually, it cannot be predicted a priori when these events occur, but it is possible to predict the effects of these events, that is, an appearance of a new job for processing, a necessity of repairing operation, a necessity of repeating an operation, or several operations for a job with defects. Consequently, these events may cause data or parameters of the problem to change. Moreover, we would like to model formally the effect of these events in decision process.
The ALM models switching method is based on the ALMM methodology and consists of the following elements:
Analysis of types of disturbances;
Analysis of how date can change based on type of disturbance;
Determining the set of switching states;
Distribution of problem for subproblems;
ALM models creating for all subproblems;
Specifying types of switching;
Determination of the switching rules;
The switching function definition.
It should be noted that a structure of ALM models for subproblems may be the same or different. It depends on the type of data changes. In the simplest case, we can use the same model. Furthermore, for some problems, in which there are various types of data changes, we can specify several models of simpler problems (subproblems of initial problem) taking into account the changes that can be predicted.
The executing method is as follows. A disturbance occurrence is detected in the nearest next process state
General hybrid algorithm procedure
The general idea of the hybrid algorithm is proposed in this section and the elements of the algorithm are given as follows. The algorithm generates process trajectory using the special local optimization task. A trajectory generation is interrupted when a disturbance is detected or disturbance or its effect is eliminated. Then, the switching ALM models method is used. To apply the general idea, individual elements of the algorithm should be developed. We proposed the following elements based on the factors set out in the general descriptions of the methods in the previous sections:
Analysis of the problem. Consists in determining some characteristic problem features. In particular, limitations or requirements reflected to the problem are detected and preferences of certain types of states or decisions are determined. Moreover, identification of occurring disturbances is made, both kind of disturbances and the moment of occurrence. The purpose of this analysis is to design local criterion form and particular elements of switching method.
Local criterion definition. Consists in determining particular components based on identifying limitations, requirements, and preferences. Definition of components related to the estimation of the quality index for the final trajectory section is also important (it may have different forms and precision). Moreover, modification of the local optimization task could be defined. It should be noted that the local criterion form can be designed in different ways. First, the components may be determined based on the properties of the problem without disturbance; then, the criterion in such a form can also be used for a process taking account of the disturbance. The second way is to design an additional component or components associated with the considered disturbance. When one has identified more different types of disturbances, suitable ingredients may be used appropriately.
Switching method elements definition. Consists in set of switching states specification (includes all states when new disturbance occurs or previous detected disturbance is removed for all types of disturbance and this also states when, for example, the first kind of disturbance is removed and the second occurs in the same process state), distribution of problem for subproblems (e.g. problem without disturbance and problems which take disturbance or its effects into consideration), ALM models for all subproblems specification (depends on the type of data changes, a structure of ALM models may be the same or different. The aim is to specify simpler models of simpler problems), types of switching specification (it depends on number of disturbance type. There are three types of switching when only one type disturbance is detected: (1) the system switches from process without the disturbance to process taking into account disturbance or its effects when there is no other disturbance, (2) the system switches from process taking into account disturbance to the same process with modified parameters and data for detection of new disturbance when the effects of the earlier disturbance have not been removed yet or when the part of disturbance effects has just been removed, and (3) the system switches from process taking into account disturbance or its effects to process without disturbance when all disturbance effects have been just removed. However, the greatest number of type switching should be considered when the greatest number of disturbance type is detected. In such a case, it should be analyzed all the possibilities of switching when the system switches from process with one kind of disturbance to the process with another type of disturbance or to the process without disturbances), and the switching function constructing (determining the rules depending on types of switching. It consists in determination of algebraic formulas to recalculate parameter values in case of switching between the same model ALM or calculate a new state and new parameters value in case of switching between different ALM models. The switching rules are not determined for all combinations of switching between models. It should be excluded the switching between those models, which are not related. For example, two models are not related when reparation of one type of disturbances is two-sided: first, the other type of disturbance is received and after that, it is total repaired. It means that the system cannot be switched from model with this type of disturbances to the model without disturbances).
When all the algorithm elements presented above are determined, the steps of proposed algorithm are as follows. Let us assume following notation to better illustrate the steps of the algorithm:
The first trajectory is constructed. The basic process, for problem without disturbance, starts with initial state
The basic model without disturbances, but with recalculated parameters
The current version of the model with disturbances with recalculated parameters
Other appropriate models with disturbances
The above procedure is repeated until the whole trajectory (admissible or non-admissible) is not generated. The result can be stored and used for constructing the next trajectory. Based on this, the next trajectories can be constructed with modified local criterion coefficients value (a and b) as well as the modified local criterion basic form.
Figure 2 shows examples of the process trajectory. The first example takes into account the trajectory of one switch to the model with disturbances

Examples of the process trajectories.
Algorithm for flow-shop system with defects
This section presents the complete hybrid algorithm application to flow-shop system with defects. The algorithm generates process trajectory using the special local optimization task. When job quality defect is detected or repair of defective elements was completed, the trajectory generation is interrupted and the switching ALM models method is used. Then, the process of constructing the trajectory is continuing. Below, particular elements of hybrid algorithm are presented.
Analysis of the problem
First, analysis of the problem and identification of occurring disturbances were made. The purpose of this analysis was to determine some characteristic problem features. This analysis took into account several aspects characterizing the specific problem: number of workstations in which quality control is performed, range and accuracy of quality control, and actions to be taken after finding a lack of quality.
Based on the analysis of the process, it can be concluded that detection of defect is an uncertain event (disturbance). Without this event, a basic process is a realization of a set of jobs in flow-shop system with deadline. The consequence of those events is that we have to use an additional machine (machines in the general case) to repair the defected job. In this case, the process is realized in a flow system, where there is repairing operation outside manufacturing route. Therefore, the analysis showed that a repair on the additional machine and re-treatment can be modeled by switching the model of flow system with deadline, the model of flow system with deadline which takes into account the additional machine to repair deficiencies and the division of job into two parts (one including only elements to repair and second including elements without defect).
Set of switching states
Switching takes place in two cases; first, in the kth state of the process, in which as a result of quality control defects were found. In this case, the additional repairing machine is needed. Second, switching takes place in states in which defect repairing is finished, thus an additional machine is not necessary anymore. Therefore, the set of switching states
Distribution of problem for subproblems
Having regard to analysis results, the basic flow-shop system with deadlines and defects removal problem was split into two subproblems: flow-shop system with deadlines and flow-shop system with deadlines and additional repairing machine.
ALM models for all subproblems
The next step was creating two algebraic-logical models. For this purpose, first, we created a model of flow-shop problem with time limits but without repairing and re-treatment (called model
To define the process using algebraic-logical model, it should be given a form of system state, the initial state, the set of non-admissible generalized states, and the set of goal-generalized states first. The form of the system state has to contain an adequate description of the system components like machines, jobs, and warehouses, so that the model takes into account the ability to assign jobs to the appropriate machine or waiting machines to complete certain jobs and jobs waiting to be assigned to the machine, which is currently busy. Then, it should be given the form of a decision and the set of decisions that can be taken in individual state. At the end of the model construction, it should define the transition function, that is, the way of determining the moment when another state occurs.
Algebraic-logical model of flow-shop system with time limits
Let
A set of jobs is denoted as
State of system
The generalized state of process

where
A coordinate
A structure of the machine state is as follows:
We can say that each ith machine is not working (is free) in state s when machine state is
Let
In an initial state (
We define in the model a helpful set of completed jobs
The set of non-admissible generalized states
Decisions
In the considered problem it is assumed that the decision consists in assigning jobs to individual machines at the same time. Particular coordinate
The following assumptions have been proposed regarding the decision: the decision to allocate the next job for the machine can be taken if and only if the machine finished the previously assigned job and the job was previously performed by the previous machine in the technological route, the taken decision cannot be changed. Thus, the busy machine (realizing decision taken earlier) can only continue performing the previously assigned job. To the free machine in current state, it can be assigned the job which satisfies the condition that it has been done by the previous machine in the technological route. When there is no job assigned to the free machine, the machine is still free.
Thus, the decision is a vector,
If jth job is assigned to the ith machine, then only the possible decision to take is processing continuation
If the ith machine is free and there is no job that could be assigned, that is,
If the ith machine is free and the ith store is not empty (i.e. any jth job from the store can be assigned to the machine), then the possible decision to take is assigned job
The decision

We should note that it is not possible to assign one job to two different machines. Each set
The complete definition of the set of the possible decision is as follows:
Transition function
The transition function is defined by means of two functions
Once the moment
Value of coordinates related to machine state
If ith machine is free in given state machine and decision is

If ith machine is free in given state and decision is
If ith machine is busy in given state and decision is

Algebraic-logical model of flow-shop system with repairing machine
Let
State of system
In the same way as in the
The initial state of model
The set of non-admissible states and the set of goal states have the same structure as in the
Decisions
Analogically, as in the
Transition function
Moment
If

If

If

Types of switching
The following steps were to specify the types of switching. Three types of switching should be executed:
The system switches from
The system switches from
The system switches from
The switching function
The last step was determining the switching rules and the switching function. Detailed formulas of how to calculate the next state in case of switching was proposed in Grobler-Dębska et al. 2
Let us consider the following notation that is used to present the switching function. Let
1. Detection of quality defect when there is no other quality defect. Until that moment, additional defects removal machine was not necessary, thus the

2. Detection of quality defect when there is another, previously detected, quality defect and it hasn’t been repaired yet. Until that moment, additional defects removal machine was necessary, thus
Thus,

3. Detection of quality defect when there is another, previously detected, quality defect and it has been just repaired. Until that moment, additional defects removal machine was necessary, thus

4. Completion of repairing previously detected quality defect and the work-in-progress store before repairing machine isn’t empty (there are previously detected jobs with defect). Until that moment, additional defects removal machine was necessary, thus model

5. Completion of repairing previously detected quality defect, the work-in-progress store before repairing machine is empty and repairing machine is not working (there is no previously detected job with defect). In this case, the system switches from

Local criterion definition
Based on preliminary analysis of problem, the form and modification the local optimization task could be defined. The analysis gives the following information: the number of tasks with deadline, the earliest due date and the latest deadline, and maximum and minimum size of elements in the task. As a result of this analysis, the local criterion takes into account the part defined by A* strategy, the change of global criterion Q resulting from making this decision and estimated value global criterion for the rest part of the trajectory. Second part takes into consideration the restriction reflecting jobs due date. The third part deals with preference of certain types of decisions. We would like to perform job containing the greatest number of elements or job with shortest processing time (in accordance with the SPT principle of the priority job scheduling) first. Finally, local criterion has following components

where

• •
In the course of trajectory generation, the local optimization task may be modified. Problem analysis reveals that the moment of all tasks with deadline are already finished, it is no longer necessary to apply the component
A schema of hybrid algorithm for flow-shop with defects is presented in Figure 3. The steps of hybrid algorithm for flow-shop system with deadline and defect removal are as follows. The process starts with initial state

Hybrid algorithm.
In the case of new quality defect detection, the further switching of ALM models takes place. The current version of the model with additional repairing machine is recalculated using switching function. We use the model
Experiments and results
The effectiveness of the searching algorithm with the special local criterion has been used to solve some problems of parallel scheduling and verified by simulation experiments many times.31,33,34 For the flow shop scheduling problem with defect removal we have tested heuristic algorithm, which is very intuitive and consistent with the considered problem assumptions. Thus, the purpose of the simulation experiments is to verify the effectiveness of the algorithm knowing that the time to find a solution by the algorithm is short.
The proposed solution of the aforementioned problem has been implemented in C# as authoring software program. The simulation experiments run on an Intel CoreTM i5-4210U CPU 2.40 GHz (16 GB RAM).
In the paper, 3 we have tested how the combination of the switching method and searching algorithm works. Thus, first, we have tested how expensive it is to switch one model to another model. Next, we have studied how number of defect repairs influences to all jobs execution time and the number of switching between models. Based on these experiments, we have deduced that more economical is to switch between models than considering only one model the maximum model (with machine repair). It should be emphasized that the time of checking of defect occurrence or checking whether the repair machine has completed repairing is calculated in computation time of switching procedure. Thus, the purpose of the simulation experiments is to verify the effectiveness of the heuristic algorithm knowing that the computational time is short.
These studies on the effectiveness of the algorithm have compared the results obtained with the reference solutions of the problem of flow-shop: ta001, ta002, and ta024.
37
We have calculated for each problem a result (denoted as
Results of experiments for p = 0 and known instances.

In spite of the fact that the heuristic algorithm is simple, the obtained results are worse than the best solution by approximate 2.
We have also tested several settings of the algorithm (values of parameters
Results of experiments for

Results of experiments for

Results of experiments for

It can be seen that the deviation of makespan for each size of problem is small (approximately 2%), which means that the algorithm is stable. Although there is no guarantee to find optimal solutions, the computational time is very short.
Conclusion
The article presents a hybrid algorithm for solving manufacturing problem and its application to flow-shop problem, where manufacturing defects are removed to re-treatment as a result of the quality control. This algorithm is based on ALMM paradigm proposed by E Dudek-Dyduch. We have shown that hybrid algorithm can be successfully applied to problems with unexpected events occurring during manufacturing process. Especially, occurrence of quality defect is taken into consideration. What distinguishes this approach from the stochastic scheduling is the possibility of modeling the decision-making process contented with assignment of the tasks with defect to repair. We are convinced that the presented algorithm can be used in other similar problems.
Future efforts will focus on comparative research between stochastic methods and considered approach, using more complex heuristic algorithm as well as on application of our hybrid algorithm in other classes of problems.
Footnotes
Acknowledgements
The authors thank the anonymous referees for providing detailed comments and suggestions for improvements.
Academic Editor: Wu Naiqi
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article.