
Abstract
A modified model reference adaptive controller for velocity control of a conveyor system in a fish sorting system with uncertainty parameters, input saturation and bounded disturbances is proposed in this article. In general, an asymptotic tracking can be achieved in model reference adaptive controller systems. However, a tracking performance of model reference adaptive controller controllers can be quite poor as an adaptation rate is increased. To improve the tracking performance and robustness of the proposed controller in the presence of bounded disturbances, the followings are done. First, the reference model in the conventional model reference adaptive controller is replaced by a modified reference model in a modified model reference adaptive controller to reduce unexpected high-frequency oscillation in control input signal when the adaptation rate is increased. Second, estimated parameters in an adaptive law can be varied smoothly under bounded external disturbances and a projection operator is utilized in an adaptive law for the proposed modified model reference adaptive controller to be robust. Third, an auxiliary error vector is introduced for compensating the error dynamics of the system when the saturation input occurs. Finally, the experimental results are shown to verify the better effectiveness and performance of the proposed controller under the bounded disturbance and saturated input than that of a conventional model reference adaptive controller.
Keywords
Introduction
In a fish sorting system, captured fishes are transported from a fish pump that pumps the captured fishes in a ship into a fish sorting line through a conveyor system. The captured fishes are sorted by an injured rate which is estimated using an image processing system. Thus, a conveyor system speed plays a key role in estimating injured rate of fishes with high accuracy. Accordingly, the velocity of the conveyor system should be controlled in a suitable speed sufficiently to obtain the reliable recognition of the image processing system. The conveyor system in the fish sorting system consists of three or more conveyors that the desired velocities are defined in trapezoidal velocity profiles as Thirachai et al. 1 proposed. To control the closed-loop dynamics of the conveyor system close to the desired velocities, a system modelling is obtained to develop a model-based controller. However, the conveyor system has some uncertain parameters such as a friction factor, a belt elastic factor and pulling force to be unmeasured in the conveyor system. Many approaches have been suggested subject to controlling systems with model uncertainties such as an extended state observer by Yao et al., 2 µ-synthesis-based adaptive robust control by Chen and Wang, 3 backstepping control by Ahn et al., 4 sliding mode control by Guan and Pan, 5 passivity-based control by Alleyne and Liu 6 and so on.
An adaptive controller with its important ability to system uncertainties without requiring explicit unknown plant parameter identification was considered by Astromn and Wittenmark. 7 A conventional model reference adaptive controller (CMRAC) tuning directly control parameter is one of the main schemes utilized in an adaptive control field such as Duong et al., 8 Nestorovic et al., 9 Karason and Annaswamy, 10 Wagg 11 and Chen et al. 12 Although asymptotic tracking could be achieved in CMRAC systems, the tracking performance in transient state could be poor in Zang 13 because it is impossible to achieve a small deviation of the tracking error in transient with an insufficient adaptation rate. To improve the tracking performance in the transient state, the adaptation rate should be increased, but this results in many unexpected high-frequency elements in a control input signal and leads to instability. There were several efforts modifying controller architecture by Sun 14 and Stepanyan et al. 15 and update laws by Datta and Ioannou, 16 Artega and Tang 17 for improving it. A novel approach was proposed by Stepanyan and Kalmanje 18 to modify a reference model in the CMRAC by feeding back the tracking error to the reference model. A tracking error feedback gain in concert with the adaptation rate could provide ability to increase not only the tracking performance, but also the control signal performance in transient phase.
In addition, estimated parameters in update laws can be varied smoothly in the presence of bounded disturbances. Therefore, some modifications in Stepanyan and Kalmanje 18 such as the dead-zone technique, e-modification and σ-modification were utilized to modify update laws. Another approach utilizing a projection operator was also proposed by Gibson et al. 19 and Yao et al. 27
For engineering systems, it should be noted that the control input signal is frequently saturated and has proved to be a source of performance degradation. Abramovitch et al. 20 and Sun et al. 21 showed that an input control signal saturation could lead to a poor control performance and even a closed-loop system instability if its effects were not considered in the design of the controller. An anti-windup block was added in the controller of Sun et al. 22 to adjust the control strategy in the presence of saturation. Another method utilized an auxiliary error vector added in a modelling error vector to compensate the effect of input control signal saturation in Duong et al. 23
It can be seen that there are many issues to be considered in a practical system such as uncertain parameters, external disturbance and saturation input. For these issues, good tracking performance should be achieved in both transient and asymptotic states. However, all the above-mentioned approaches only focused on a few issues, whereas an approach developed for a practical system with all above issues has not been considered yet.
This article proposes a model reference adaptive control approach, which the reference model is modified by a feedback of a modelling error signal as in Stepanyan and Kalmanje 18 for velocity control of the conveyor system in a fish sorting system with uncertain parameters, saturated input and bounded disturbances. In the presence of bounded disturbance, a projection operator inspired by Gibson et al. 19 is utilized in update laws of the proposed controller to eliminate the drift phenomenon of control parameters. As well, an auxiliary error vector to compensate for its error dynamics is employed when saturation input occurs as in Duong et al. 23 The contribution of this article is to apply the projection operator to the update laws in the presence of the auxiliary error vector. The closed-loop dynamics of the auxiliary error vector are proved to be bounded in this article, whereas Duong et al. 23 did not prove it. Additionally, the boundedness of all signals of the modified model reference adaptive controller (M-MRAC) encountered with saturated input is proved, and the constraint of norm of modelling error vector, the feedback gain and the adaptation rate are demonstrated. Experimental results are shown to verify the effectiveness and the performance of the proposed controller.
System modelling
A typical conveyor system in the fish pump system shown in Figure 1 consists of an on-loading conveyor (first conveyor), a camera conveyor (second conveyor) for moving fishes pass the image processing system and a transition conveyor (third conveyor). Each conveyor consists of a mechanical subsystem and an electrical subsystem. The simplified model of the mechanical subsystem of the ith conveyor of the induction conveyor line system is shown in Figure 2

Typical conveyor system in the fish pump system.

Simplified model of the ith conveyor of the induction conveyor line system.
In Figure 2,
To simplify the mechanical subsystem modelling, assumption 1 is proposed as follows:
Assumption 1
Connection between motor shaft and driving roller is rigid and short.
Belt slippage on the rollers is negligible.
Parcel slippage on the belt is negligible.
The mass of parcel is negligible.
To drive the mechanical subsystem, the electrical subsystem is used. The inverter with direct current (DC) voltage input controls the induction motor to create sufficient torque to drive the mechanical subsystem as shown in Figure 2.
Under the above assumptions, the ith mechanical driven system can be expressed by the following

where

where

where
A dynamic induction conveyor line system based on equations (1)–(3) can be expressed in the state space as follows

where
Controller design
The control objective is to determine a designed control input vector
Conventional model reference adaptive controller
The conventional reference model used such that its output vector tracks asymptotically a reference input vector

where
Assumption 2
Given a known Hurwitz matrix

Remark 1
The true knowledge of the matrix
Assumption 3
A positive symmetric definite matrix

where
Substituting equation (6) into equation (4), adding and subtracting

where

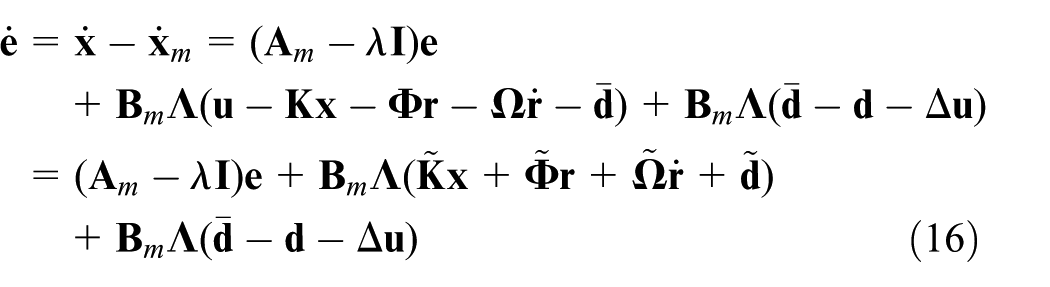
By defining an error vector

If

where

where
Modified model reference adaptive controller
Values of the designed control input vector


where
When the modelling error vector
A saturated input error vector is defined as follows

From equations (8), (9), (11) and (13)–(15), the first time derivative of
where
To remove the effect of the saturated input, an auxiliary error vector

where
Therefore, a new error vector is defined as follows

From equations (16) to (18), the first time derivative of
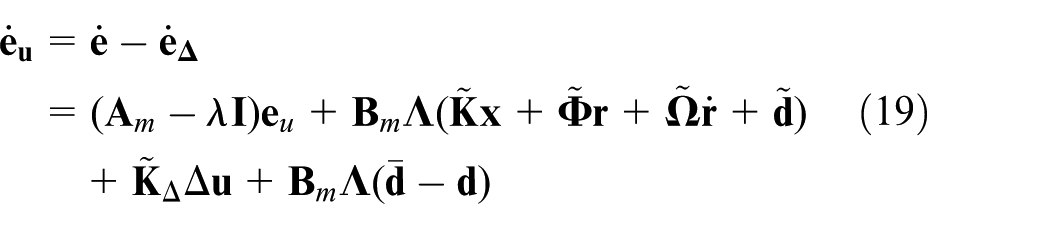
where
Estimated control gains
Theorem 1
An M-MRAC system of equations (4) is stable as long as a designed control input vector of equation (11) is given and update laws using a projection operator are given as follows



where
Definition 1
A general form of the projection operator defined by (20) is a

where
Definition 2
A projection operator for two vectors
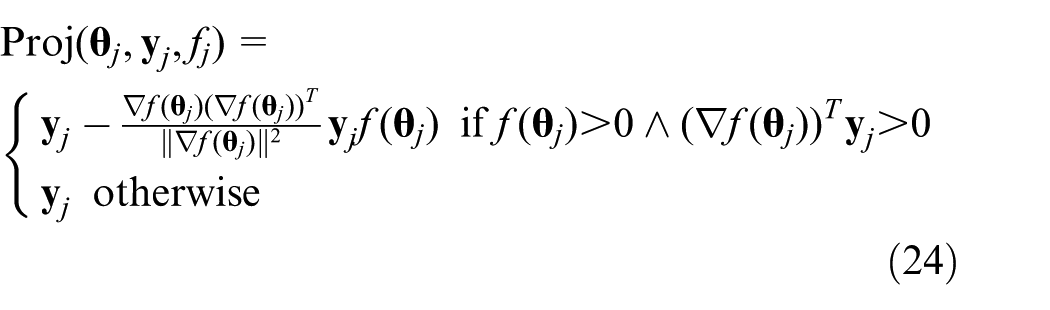
where

where
One important property of the projection operator proven by Lavretsky et al. 26 is as follows

where
Lemma 1
Putting

Proof
Using equation (25), the following is obtained as

□
Proof of Theorem 1
A candidate Lyapunov function is chosen to analyse the stability of the system as follows

The first time derivative of
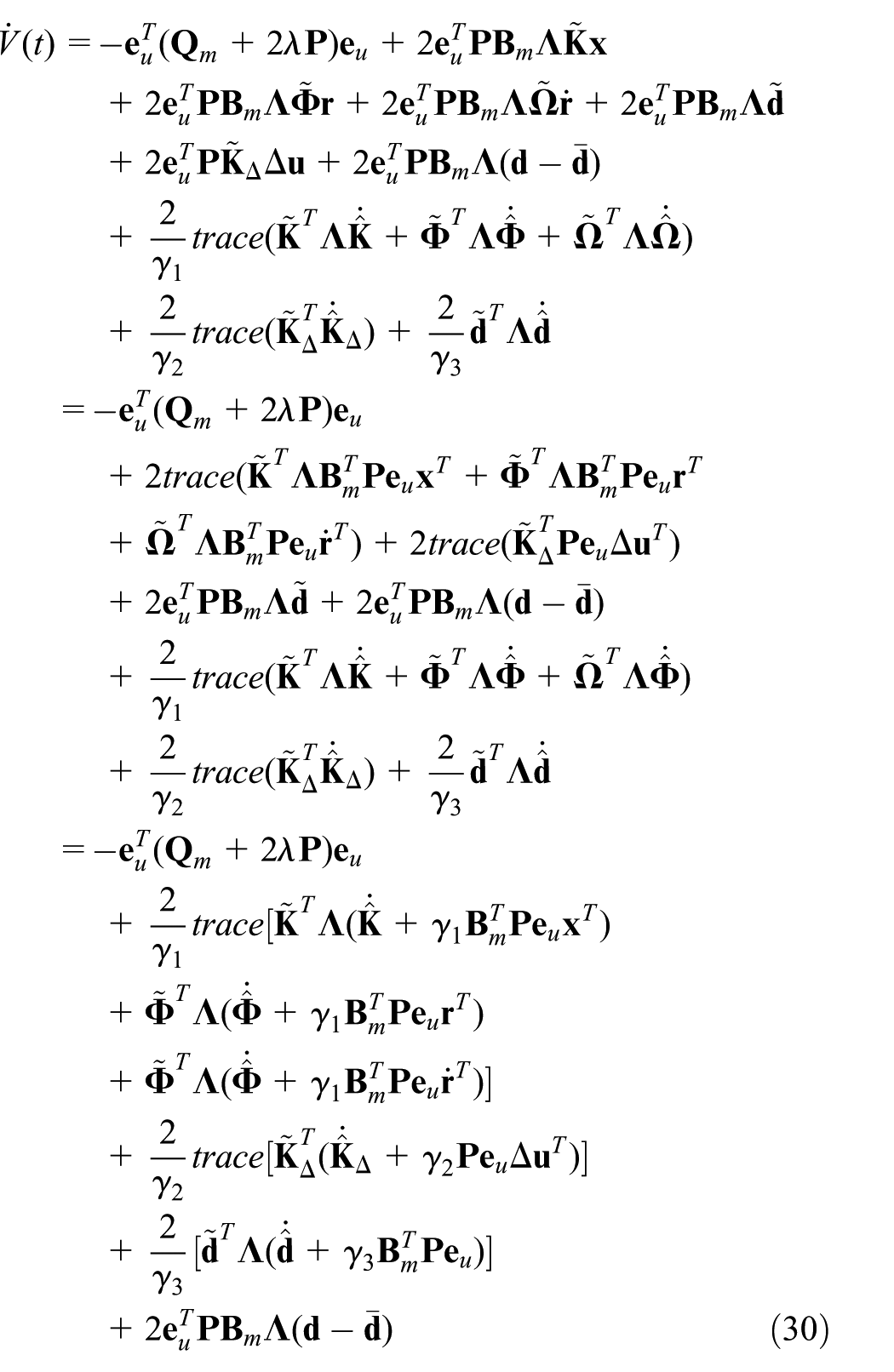
Equation (30) can be reduced as follows
where
Using update laws (20)–(22), definition 2 and Lemma 1, the followings equations are satisfied



From equations (32) to (34) and the Rayleigh principle, equation (31) can be rewritten as follows

where

This implies that
A candidate Lyapunov is chosen as

Using Rayleigh principle, equation (37) yields

and the first time derivative of W is given as follows

where
Using the Gronwall Bellman Inequality, equation (39) implies that

Using equations (37) and (40), following equations are obtained



It can be proven that
E.O.D.
Constraint of the modelling error vector, the feedback gain and the adaptation rate
Since

where
From equations (29), (36) and Rayleigh principle, the following equation is satisfied

To obtain a bound on

with
Using the Rayleigh principle in equations (29), (45) and (46), the following equation is satisfied
From equations (36) and (47), the following equation is obtained

Hence, from equations (18), (44) and (48), the above limit of

In inequality of equation (49), the bounded value of
The block diagram of the proposed controller is shown in Figure 3.

Block diagram of the proposed controller.
Experimental results
Experimental setup
To evaluate the effectiveness of the proposed controller (M-MRAC) and compare it with the CMRAC, a conveyor plant is established as shown in Figure 4. This plant consists of three conveyors and a TMS320F28069 digital signal processor (DSP)-based microcontroller. Each conveyor in the conveyor plant consists of an alternating current (AC) motor, an inverter, driven and driving rollers, a belt and an encoder to measure an angular velocity. The M-MRAC and the CMRAC are built into DSP chip.
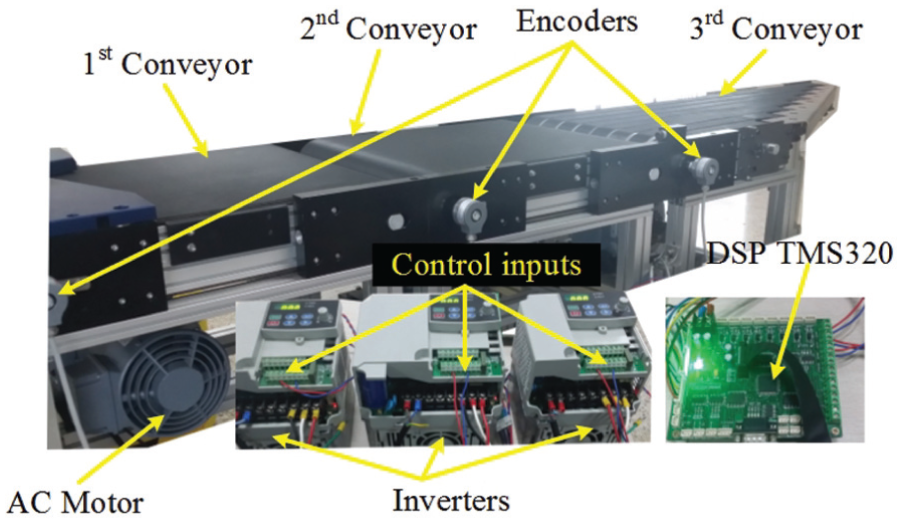
Experimental conveyor plant.
The initial values of the state variables and the controller inputs are set to zero. Input voltages of the inverters considered as control inputs of the proposed controller can vary in range from
The parameters of the modified model reference system are given by

Velocity profiles of all conveyors.
Comparative experimental results
In order to demonstrate the effectiveness of the proposed controller, the following three cases are considered.
Case 1
The adaptation rates of both CMRAC and M-MRAC are set to

Experimental output of the M-MRAC and the conventional MRAC controller for the first conveyor.

Experimental control input of the M-MRAC and the conventional MRAC controller for the first conveyor.
Case 2
The adaptation rates of both CMRAC and M-MRAC are set to
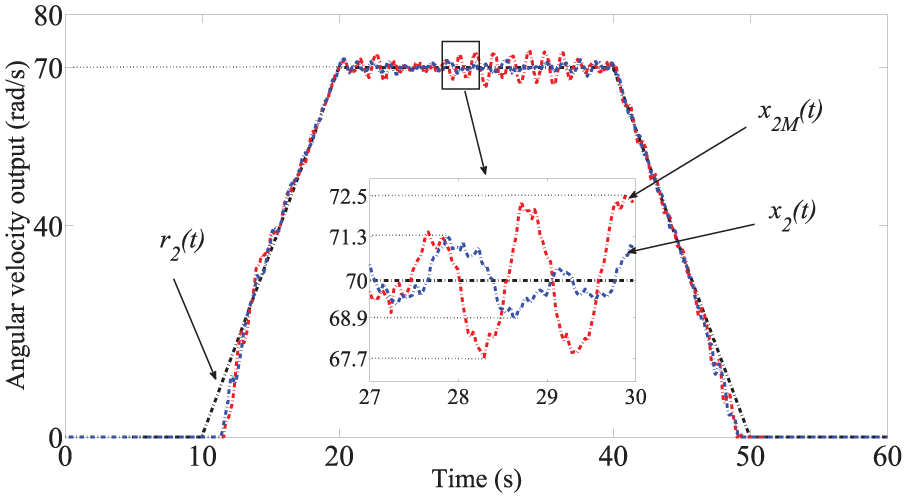
Experimental output of the M-MRAC and the conventional MRAC controller for the second conveyor.

Experimental control input of the M-MRAC and the conventional MRAC controller for the second conveyor.
Case 3
Similarly, the adaptation rates of both CMRAC and M-MRAC are set to

Experimental output of the M-MRAC and the conventional MRAC controller for the third conveyor.

Experimental control input of the M-MRAC and the conventional MRAC controller for the third conveyor.
The tracking performance of the proposed M-MRAC controller versus the CMRAC is given in Table 1.
Modelling error of M-MRAC versus CMRAC.

M-MRAC: modified model reference adaptive controller; CMRAC: conventional model reference adaptive control.
Conclusion
An M-MRAC for belt conveyors in a fish sorting system with uncertainty parameters, input saturation and bounded disturbances was proposed. The feedback of modelling error signal in the proposed M-MRAC controller obtained smaller modelling error than that in the CMRAC (0.7% vs 3.1%). The tracking performance of the proposed M-MRAC has better improvement in both transient state and asymptotic state than that of the CMRAC and the high-frequency elements in control input signals were reduced in the proposed M-MRAC when the adaptation rate was increased. The error dynamics under the input saturation was compensated by the auxiliary output error. The experimental results showed that the proposed M-MRAC became more effective than the CMRAC when the adaptation rate was large and the error feedback gain was selected suitably.
Footnotes
Academic Editor: Jianyong Yao
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was a part of the project titled Localization of unloading automation system related to Korean type of fish pump, founded by the Ministry of Oceans and Fisheries, Korea.