
Abstract
The tracking control problem for nonlinear system with unknown control coefficient and external disturbances is investigated in this article. By inspiring extended state observer and K filter, a novel extended state filter is first developed for state and disturbance observations. Then, by means of backstepping approach, an adaptive composite output feedback controller is constructed based on the state and disturbance estimations. The stability analysis is presented on the basis of the Lyapunov stability method. Finally, a numerical example is presented to demonstrate the effectiveness of the proposed control approach.
Introduction
Since disturbances widely exist in many practice systems, for example, spacecraft system, power systems, industrial processes, and many other systems, a control system is required to have the ability to handle disturbances to provide satisfactory control performance. A number of control approaches have been proposed to deal with disturbances for nonlinear system, for example, stochastic control,
1
output regulator,2,3
Recently, disturbance compensation control schemes (including active disturbance rejection control (ADRC)13,14 and disturbance-observer-based control (DOBC) 15 ) have received more and more attention and been regarded as a nice choice to accomplish robustness against uncertainties and disturbance rejection performance.13–24 The basic idea of disturbance compensation control method is that an observer, including disturbance observer or extended state observer, is constructed to estimate the unknown disturbances and then a feedforward compensator together with a conventional feedback controller is combined to reject unknown disturbances to obtain a satisfactory control performance.13,15–17 Furthermore, disturbance compensation control methods can provide a flexibility of structure, that is, the observer and the feedback controller can be independently designed and integrated. In consideration of the advantage, disturbance compensation control methods have been applied to various control fields.25–31–33,34 The fact that the control direction is unknown is one of sever uncertainties. And many scholars have paid attention to studying the control problem for systems with unknown control direction and obtained many meaningful results.35–37
Note that in the disturbance compensation approach, when the control coefficient is unknown, the usual approach is to choose a nominal value of control coefficient. Then, the corresponding error and external disturbances are regarded as the lumped disturbances, and the disturbance estimation technique is employed to estimate them. However, if the nominal value is chosen to larger or smaller, it may not obtain good control performance. So, it is necessary to propose some control approaches to enhance the control performance of nonlinear system with unknown control coefficient.
In this article, the tracking control problem for nonlinear system with unknown control coefficient and external disturbances is addressed. First, a novel extended state filter is constructed to estimate system states and external disturbances. Then, using backstepping method, a composite adaptive output feedback controller is developed. The stability analysis is established on the basis of the Lyapunov function theory. Finally, a numerical example is presented to demonstrate the effectiveness of the proposed method.
The main contribution of this article is as follows: first, a novel extended state filter is proposed to estimate the unknown states and unknown disturbances, and second, in the disturbance compensation control framework, an adaptive control scheme is developed to solve the control problem for systems with control coefficient unknown.
Problem formulation and preliminaries
In this article, we consider the following uncertain system

where
Letting

where

The control objective is to find an adaptive composite anti-disturbance controller such that
All closed-loop signals are uniformly ultimately bounded (UUB);
y tracks the reference signal
In order to control design and stability analysis, an assumption condition is presented.
Assumption 1
The derivative of the disturbances is bounded, that is,
Controller design and stability analysis
Observer design
Similar to ADRC scheme, an extended state variable is added

Then, the extended system equation is described as

where

An extended state filter is constructed

where
The estimate state is defined as

The estimation error is defined as

Then, its derivative is

Controller design
In this part, the controller is constructed by employing the observer-based adaptive backstepping technique. The recursive design is used in the subsystem

Step 1. Define the tracking error

Then, the derivative of equation (10) is presented as

The Lyapunov function for system (11) is defined as

Computing the derivative of equation (12), we obtain
where

Substituting equation (14) into equation (13), we obtain
According to Young’s inequality, we have

Note that

Similarly, we can derive

and define

Combining equations (15), (17), (18), and (19) yields
Step 2. We consider the following dynamic system

where
Define the following Lyapunov function

Computing the derivative of equation (22), we obtain

The virtual control law

Substituting equation (24) into equation (23) leads to

Note that

Define
Step i

satisfies

where

Computing the derivative (30), we obtain
The virtual control law

Substituting (32) into (31), we have
Note that

Combining (33) and (34), gives rise to

When


The Lyapunov function is chosen as a

Then we have

The adaptive law is constructed as

where

According to equation (41), we obtain
Considering equation (39)–(42), we have

Theorem 1
Consider system (1). The following inequalities hold

Under controller (36) and adaptive laws (40), all signals of the closed-loop system are UUB.
Proof
Combining equations (43) and (44), we have
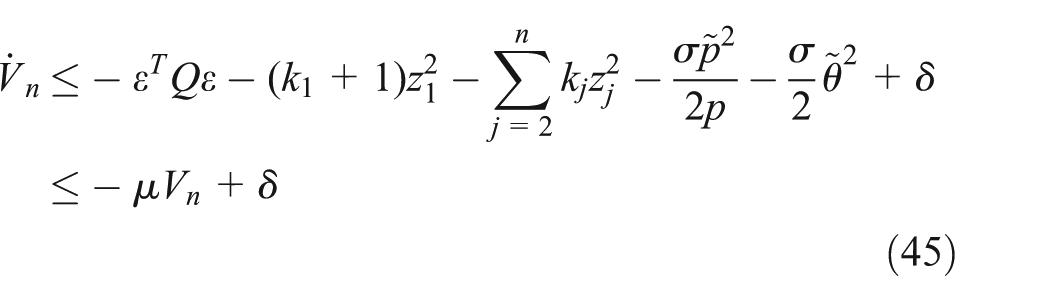
where
Solving the inequality yields

This implies that
From equation (46), we obtain
A numerical example
Consider the following second-order systems

where
The external disturbances and nonlinear function are presented as
According to the controller design in section “Controller design and stability analysis,” a composite controller for system (47) is presented as follows


where
The controller parameters are listed as follows

The initial state of the system is
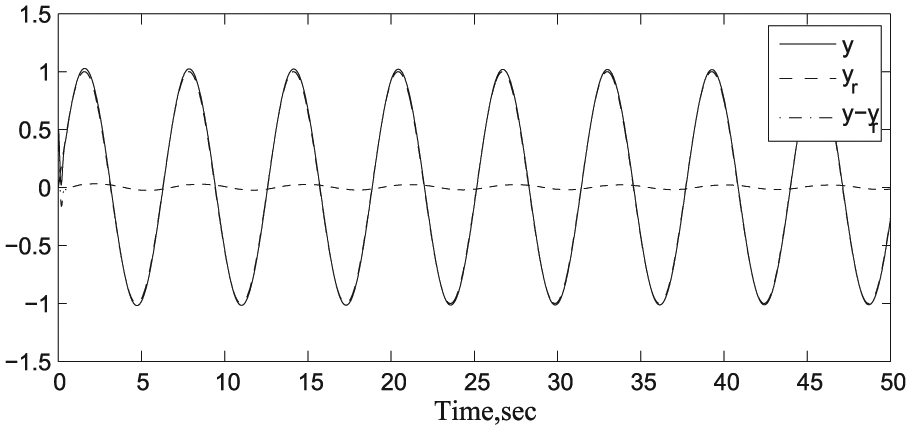
Curves of system output y, reference signal

Curves of disturbances d and disturbance estimation
Conclusion
The problem of output tracking control for a class of system with unknown control coefficient and external disturbances has been investigated. In order to obtain the disturbance estimation value, an extended state filter has been proposed. Then, an output feedback controller has been developed on the basis of backstepping method. Using Lyapunov function technique, the closed-loop system stability has been analyzed. Finally, a numerical example has been provided to show the effectiveness of the proposed algorithm.
Footnotes
Academic Editor: Chenguang Yang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China (nos 61403227, 61320106010, and 61627810), the Taishan Scholar Project of Shandong Province, and the Project supported by the Zhe-jiang Open Foundation of the Most Important Subjects.