
Abstract
The nonlinear axial–lateral free vibration behavior of the rotor is investigated by a new sight to the Timoshenko beam theory. In the modeling of the system based on this new nonlinear dynamic model in which the nonlinearities are originated from the stretching of beam centerline, the effects of rotary inertia, gyroscopic forces, and shear deformations are taken into account but the torsional deformation is neglected. According to this new methodology in which the curved geometry of the beam is represented by the Euler angles and the shear deformations, a nonlinear system of coupled variable-coefficient differential equations is derived which is solved by the method of multiple scales in order to determine the nonlinear natural frequencies. The accuracy of the solution method is inspected by comparing the numerical results with the results of two other beam theories and also by the comparison of the free vibration response obtained by the perturbation technique with the numerical integration of the governing equations. The effect of various parameters such as the rotational speed, slenderness ratio, and shear-to-bending stiffness ratio on the free vibrations of the system is inspected. The study demonstrates the nonlinear stretching effect on the free vibration behavior of the shear deformable spinning beam.
Keywords
Introduction
Rotating machineries have many applications in various mechanical equipments such as compressors, pumps, fans, industrial turbines, aircraft gas turbine engines, spindles of machining tools, helicopter rotors, and motors. The correct analysis and prediction of the dynamic behavior of rotating machines are of great importance because any imperfection of the rotating components can lead to irreparable damages to the systems. Consequently, the rotordynamics is of great importance in engineering mechanics so that the results of the vibration analysis of rotor systems are essential to the design of industrial machineries. The stability and vibration behavior of rotating machineries have been extensively studied by many researchers.1–6
Generally, several parameters such as the spin speed of the rotor, the mass imbalance of the shaft, the support characteristics of the system, and the properties of the foundation can affect the dynamic characteristics of the rotating systems. Consequently, various models are developed in the previous studies on this field in order to inspect the dynamic behavior of the rotor-bearing systems based on the linear or nonlinear and discrete or continuous mathematical modeling. Linear models which are extensively discussed in the rotordynamics7–9 do not have the capability of the exact behavior prediction of the complicated systems. However, the nonlinear phenomena can be seen abundantly in rotordynamics. Although the nonlinear analysis of the rotating systems is far more difficult in comparison to its linear counterpart, the need for accurate results has increased the importance of considering the nonlinearity in the dynamic analysis of rotating equipment. In order to model nonlinearities in rotordynamics, various models have been considered in the aforementioned works, such as very simple lumped systems10,11 and continuous systems in Shaw and Shaw 12 and Leinonen. 13 Nonlinearities in rotor systems can be naturally due to the support conditions,14–17 inertial or material reasons,18–21 or geometrical reasons.17,22–28 The geometric nonlinearity may be caused by nonlinear stretching or large curvatures or nonlinear relationship between the strain and displacement field. Nonlinear inertial effects are caused by the inertial effects of concentrated or distributed masses, and material nonlinearity occurs in the cases that the relationship between the stresses and the strains is nonlinear. Accordingly, lots of research works have been devoted to the nonlinear features of the rotordynamics and it still attracts the attention of many researchers. Ji and Zu 16 used the perturbation method to investigate the vibration behavior of rotating assemblies based on the linear Timoshenko beam under the effect of a nonlinear bearing pedestal model with nonlinear spring and linear damping characteristics. Cveticanin 21 studied the nonlinear vibrations of a rotating shaft which was originated from the elasticity and geometry using the Galerkin method. A geometrically nonlinear model was developed by Luczko 22 based on the Von-Karman nonlinearity assumptions in addition to shear deformations and gyroscopic effects. JianPing et al. 17 employing the finite element method analyzed the nonlinear dynamics of a rotating assembly based on a continuum model. They also examined the simple discrete model and found the significant differences between these two models. Rubel et al. 23 presented a model for the dynamics of fast rotating, elastic beams supported in hydrodynamic bearings. Special focus was put on the influence of the nonlinear bearing reaction forces on the dynamics. Their continuous rotor was modeled using Euler–Bernoulli beam theory under the inclusion of rotatory inertia and gyroscopic effects. The finite element method was applied to discretize the beam equation, and the bearing forces were included into the model as point forces in the bearing nodes. Shad et al. 24 investigated the dynamics of the rotor system analytically and numerically by considering nonlinearity due to higher order large deformations in bending. Ding and Zhang 25 studied an isotropic flexible shaft, acted by nonlinear fluid-induced forces generated from oil-lubricated journal bearings and hydrodynamic seal using the Galerkin method. Hosseini and Khadem 26 investigated the free vibrational behavior of a rotating shaft under the in-extensionality condition and nonlinear curvature and inertial effects. Neglecting the shear deformation, they considered the rotary inertia and gyroscopic effects and used the multiple scales method to study the free vibrations of the shaft. They found that the backward and forward frequencies appear simultaneously in the nonlinear natural frequencies. Khadem et al. 27 studied large amplitude vibrations of an in-extensional simply supported rotor. They considered the effect of gyroscopic forces and rotary inertia and neglected the shear deformation. Using the multiple scales method, the effects of physical and geometrical parameters were investigated on the forced vibrations of the rotor. It was shown that in this case, only forward frequencies are excited and the stiffness of the system is of hardening type. Hosseini et al. 28 studied primary resonances of a rotating shaft with nonlinearities in curvature and inertia and in-extensionality condition. They investigated large amplitude free vibrations of the spinning beam under six types of support conditions. They neglected the shear deformation, but took into account the gyroscopic effects and rotary inertia and showed that the forward modes are excited in the primary resonances and both forward and backward modes are excited in the free vibrations of the system. Ishida et al. 29 studied the nonlinear forced vibrations of the spinning distributed mass rotor in which the nonlinear geometries originated from the stretching of the rotor centerline. Applying the method of multiple scales, Hosseini and Khadem 30 studied the primary resonances of a rotor in which stretching nonlinearity, gyroscopic effects, and rotary inertia were considered but the shear deformation was ignored. Shahgholi and Khadem 31 investigated the large amplitude primary and parametric resonances of an asymmetrical rotating shaft with simply supported boundary conditions and stretching nonlinearities. They included the rotary inertia and gyroscopic effects in their model and neglect the shear deformation. The asymmetrical effect included the inequality of bending stiffness and mass moments of inertia in the principal axes directions, and the parametric excitation due to inequality between mass moments of inertia and bending stiffness in the direction of principal axes was considered. Hosseini and Zamanian 32 investigated the free vibration of rotor with simply supported boundary conditions under the effect of stretching nonlinearity. They included the gyroscopic force effects and rotary inertia in the study and neglected the shear deformations. It was shown that forward and backward whirling modes are excited simultaneously.
As known by author, none of the previous studies has dealt with the free vibrations analysis of the Timoshenko rotor undergoing nonlinearities originated from the extension of the rotor centerline. The problem is of importance because several previous works reported the occurrence of nonlinear phenomena in rotordynamics, and there are many rotating systems that the Euler–Bernoulli beam theory is not exact enough to predict their correct vibrational behavior.
The stretching nonlinear effects on the dynamic behavior of the rotating systems are of high importance in rotordynamics. This effect is more intensive for moderately thick rotating shafts in which the axial, bending, and shear stiffness is not large enough. Therefore, it is of high interest to develop a dynamic model that satisfactorily implemented the stretching nonlinear effects as well as the shear deformations.
In the past literature of the rotordynamics, two dependent variables are assumed as the degrees of freedom in the definition of the displacement field of the rotor based on the Timoshenko beam theory. These variables consist of the lateral displacement of the mid-surface and the total rotation angle cross section of the rotor. For non-rotating or stationary beams, the variables can be replaced by the total rotation angle and the shear angle of the cross section, while no difference is appeared in the governing equations of the Timoshenko beam and two models are equivalent. 33 It was shown in the previous study of the authors 34 that if the shear angle is employed as the dependent variable instead of the total rotation angle, the governing equations of the Timoshenko rotating shaft change and some variable coefficients appear in the gyroscopic and inertial terms of the equations. This difference is originated from the fact that in the above-mentioned paper, according to the first-order shear deformation or Timoshenko beam theory, it was assumed that the shear deformation is superposed on the beam cross section after elastic deformation of its centerline while the cross section remained normal to the beam centerline. This modification leads to some deviations in the natural frequencies and critical speeds of the rotor when the results are compared with the common model in the literature. The main discriminations were discussed carefully in Mirtalaie and Hajabasi. 34
Following the previous study of the dynamic behavior of the Timoshenko rotating shaft based on this new insight on the degrees of freedom, the authors are interested in the development of the new dynamic model in which the stretching nonlinearities besides the shear deformation effects are implemented. So, this article follows our previous studies devoted to investigate the nonlinear free lateral vibrations of a flexible shear deformable rotor with stretching nonlinearities based on the new insight to the shear deformations of the beam cross section and was constructed as follows.
First, the concepts, assumptions, and geometric principles required for derivation of the mathematical model are represented. Then, employing Hamilton’s principle and based on the new representation of deformation of the cross section of the beam according to the Timoshenko beam theory, the nonlinear governing differential equations of motion as well as the boundary conditions are derived. Afterward, the method of multiple scales is used to examine the free vibration behavior of the rotor system, and the exact values of nonlinear natural frequencies in forward and backward whirling modes are determined for various parameters. The accuracy of the results is evaluated by the numerical integrations, and the effect of various system parameters on the free vibrational behaviors of the system such as rotating speed and slenderness ratio of the shaft is investigated.
Equations of motion
In this section, the nonlinear governing differential equations of motion of the rotor based on the Timoshenko beam theory with the effect of stretching are derived employing Hamilton’s principle. Here, a flexible horizontal rotating shaft in which the rotating speed is constant and the cross section is circular and uniform along the axial direction is assumed. The simply supported boundary conditions at the end-points of the shaft are considered such that both of the supports are fixed in axial displacements as demonstrated in Figure 1. Therefore, no shortening effect can be considered and the axial displacements appeared in the governing equations explicitly. Because the moderately thick shafts are assumed, the shear deformations should be taken into account. Furthermore, the effects of the rotary inertia are considered but the torsional vibrations, energy wasting mechanisms, and structural deficiencies are neglected. Furthermore, it is assumed that the amplitude of the vibration is large and stretching nonlinearity which is originated from the extension of the shaft centerline is considered.

The configuration of rotor-bearing system and the inertial and moving coordinate system.
As shown in Figure 1, a fixed Cartesian coordinate system
The orientation of the inertial frame reference with respect to the local coordinate system is defined by a series of the Euler angles, employing their sequent represents the angles of the

Euler angle sequences.
The displacement components of the elements on the middle surface of the beam are assumed as



in which
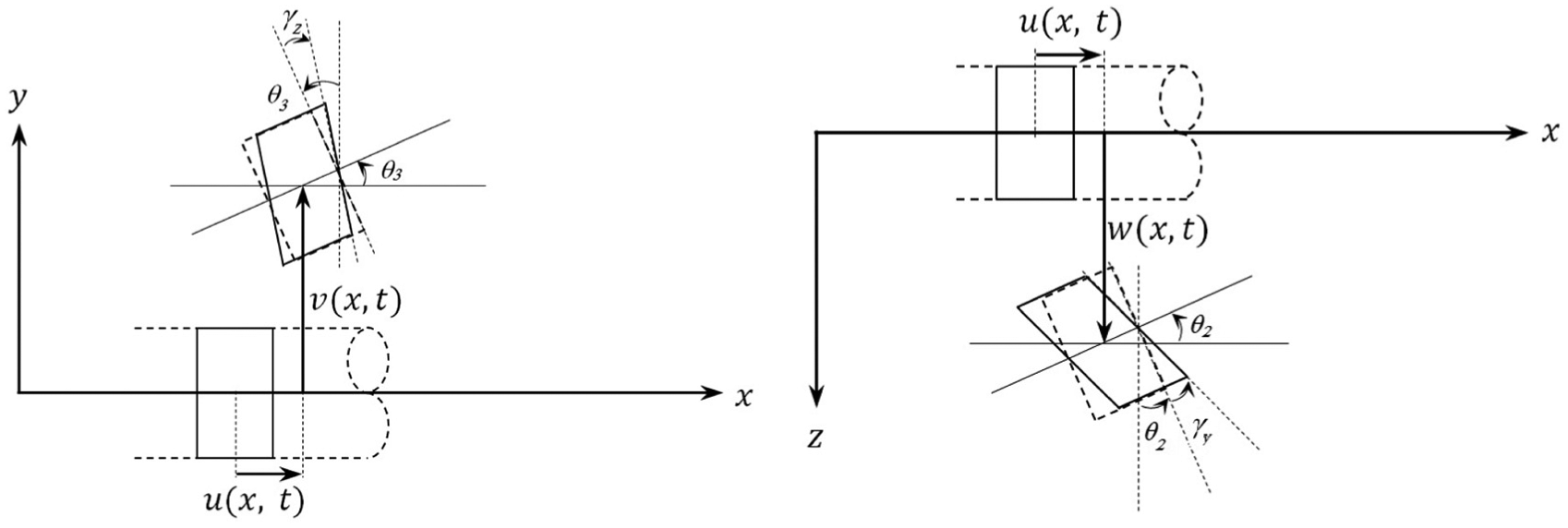
Displacements and shear deformation components of the sample element.
By the definition, the non-zero components of linear strains are obtained as
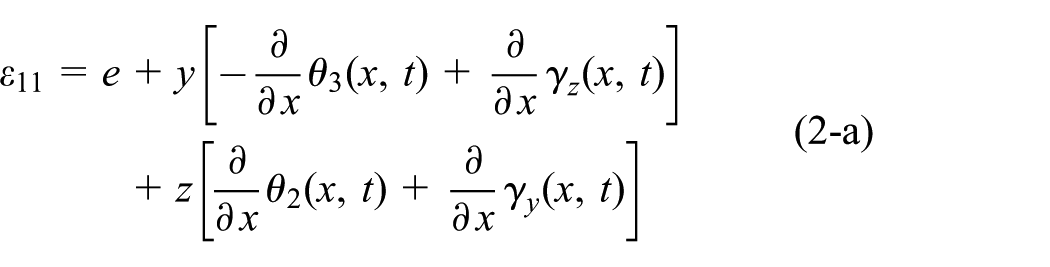


where e is the extensional or axial strain along the reference line of the shaft which is defined as 33

Keeping in mind the concept of local displacement and the geometrical representation of curvature which was completely explained in Nayfeh and Pai 33 and Bower, 35 the relation between the derivatives of rotation angles, curvature of the cross section, and Euler angles is represented as



As the torsional vibrations are neglected in this study, it can be concluded that


which are employed in the following for the evaluation of potential and kinetic energy expressions because Hamilton’s principle which states that

where E and G show Young’s modulus of elasticity and shear modulus, respectively. Substituting the strain components from equations (2), using equations (3)–(5), and expanding the results into a Taylor series by retaining terms up to the order of four, the strain energy of the shaft is simplified as

where A stands for the cross-sectional area and
The kinetic energy of the shaft is defined by

in which



Substituting these velocity components, using equations (3)–(5), and expanding the outcomes into Taylor series by retaining terms up to the order of four, the kinetic energy of the shaft is simplified as

in which
Inserting the potential and kinetic energy expressions in Hamilton’s principle and applying the variational operator, integrating by parts and doing some simplifications, the governing equations of motion are combined as



where the governing system of equations has been represented in nondimensional form employing the following dimensionless quantities

in which the following complex variables are used


The asterisk for parameter



In the following, the above-mentioned equations are solved in order to analyze the dynamic behavior of the system.
Multiple scales solution
Here, the method of multiple scales is employed to examine the nonlinear system of equations derived earlier. According to this method, the axial and lateral nondimensional displacement components and the shear deformation angles are perturbed as36,37



where


in which




A similar procedure is performed for the boundary conditions and the results are obtained as follows



After perturbation, first the linear equations (17) and the boundary conditions (19) for


in which


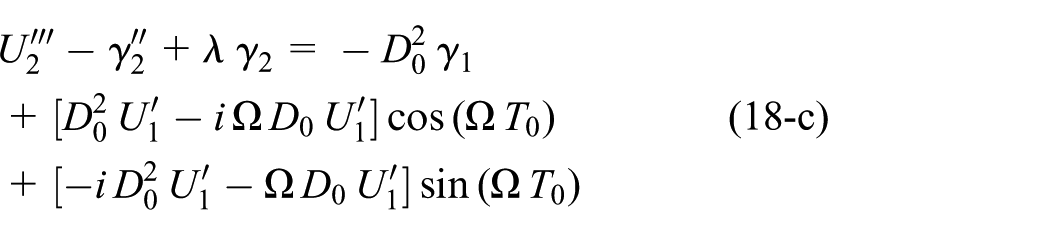
Then, the equations obtained in the second scale, namely,


in which the abbreviations CC and NSTs stand for complex conjugated and non-secular terms, respectively. The coefficients that produce secular terms are determined as




Following the Nayfeh, 37 the inhomogeneous equations (22) have solution if and only if the solvability condition is fulfilled because the homogeneous part of equations (22) has non-trivial solutions. This condition represents the orthogonality of the right side of these equations to every solution of its adjoint problem. Because the homogeneous parts of equations (22) are self-adjoint, the solvability conditions are obtained as


Inserting from equations (23), the solvability conditions are finally determined as


wherein the coefficients are as follows





The complex valued functions


where




From the first two equations, it can be concluded that the amplitude of the functions


in which the constants


By equating the real and imaginary parts in the complex variable definitions (13), the lateral deflections and shear components can be obtained. Because


It can be seen that the vibration frequency is a function of its amplitude which is caused by the nonlinearity. Furthermore, as it can be clearly seen, the linear natural frequencies in forward and backward whirling modes are simultaneously affected the nonlinear free vibration behavior of the system. It should be noted that if the dependent part of natural frequency to the vibration amplitude is neglected, the linear natural frequency of the system is obtained as is performed in Mirtalaie and Hajabasi. 34
Numerical results
In the numerical analysis, the required parameters are set as
Comparison of the nonlinear natural frequencies of the rotor with references (

Effect of rotating speed on the nonlinear natural frequencies of the rotor and comparison with the linear natural frequencies
34
(

The results are also presented for the stationary beam, that is,
Effect of radius-to-length ratio on the nonlinear natural frequencies of the rotor and comparison with the linear natural frequencies
34
(
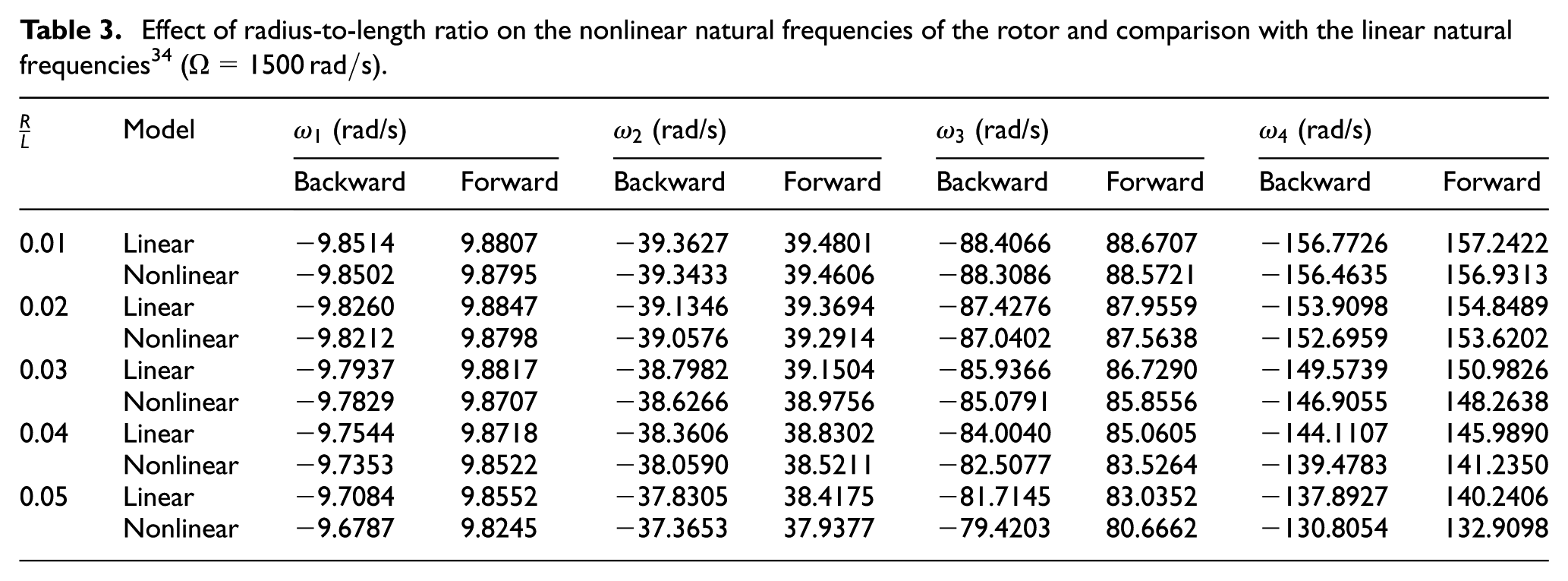
The variations in the nonlinear natural frequencies in forward and backward whirling modes with respect to the spin speed of the rotor are demonstrated in Figures 4–6 for various radius of the rotor to its length ratio in the first three modes of vibration. It can be concluded that the effect of nonlinearity is intensified at the higher modes of vibration. The nonlinear natural frequencies are increased as the spin speed and radius-to-length ratio of the rotor increased. The variation in the nonlinear natural frequencies with respect to the radius-to-length ratio of the shaft has a linear form. Also, it can be seen that for some values of the rotating speed lower than a specific value, the forward nonlinear natural frequencies are increased as the radius-to-length ratio of the rotor decreased, and for upper values of the rotating speeds than the specific value, the changes in the parameter affect the forward nonlinear natural frequencies inversely. Furthermore, the above-mentioned specific value is increased for the higher vibrational modes. This result is not observed for backward nonlinear natural frequencies. The effect of this parameter on the forward nonlinear natural frequencies is intensified as the higher modes are excited also for higher spin speeds of the rotor (greater than the specific value for forward nonlinear natural frequencies).

The effect of radius-to-length ratio and spin speed on the first nonlinear natural frequency.

The effect of radius-to-length ratio and spin speed on the second nonlinear natural frequency.

The effect of radius-to-length ratio and spin speed on the third nonlinear natural frequency.
Free vibration response
Keeping in mind the boundary conditions (14), by assuming the mode shapes of the system, the solutions of equations of motion (11) is defined as



Inserting these assumed solutions in the governing equations and keeping in mind that the mode shapes are orthogonal to each other lead to





The series solutions are truncated and

Time response of the first mode at

Time response of the second mode at

Time response of the third mode at
Conclusion
The nonlinear variable-coefficient governing differential equations of motion and corresponding boundary conditions were derived using Hamilton’s principle based on the new expression of cross-sectional rotation angles in Timoshenko beam theory. The nonlinearities were originated from the stretching of the beam centerline, and the model includes the superposition of the shear deformations on the elastic deformation of the beam centerline which is represented by the Euler angles. The nonlinear free axial–lateral vibrations of the flexible shear deformable rotor with nonlinearities in stretching were investigated using the multiple scales method, and exact values of the nonlinear natural frequencies in the forward and backward modes were determined. The accuracy of the solution method was inspected by comparing the results with the results of two other beam theories, and also, the comparison of the response of the free vibrations of the system with the numerical integration of the governing equations was done. The effect of various parameters such as the rotational speed and radius-to-length ratio of the shaft on the free vibrations of the system was inspected. The conclusions are expressed as follows:
The mutual interaction of the shear and Euler angles leads to the appearance of variable-coefficient terms in the nonlinear differential equations of the system and generally affects the global dynamic behavior of the Timoshenko rotor model.
Due to nonlinear nature of the system, the nonlinear natural frequencies are functions of vibration amplitude.
The nondependent part of the nonlinear natural frequency to the vibration amplitude represents the natural frequency of the linear model.
The backward and forward whirling modes of linear vibrations are excited simultaneously and affect the nonlinear free vibration behavior of the system.
The nonlinearity affects the natural frequencies in the decimal digits. This effect is more evident in greater rotating speeds as well as upper natural frequencies.
For same rotating speeds, the absolute values of the nonlinear natural frequencies in the forward and backward modes of whirling have negligible differences, and therefore, the beat phenomenon is appeared in the time histories of the free vibrations. They differ at the higher modes from each other.
The absolute values of nonlinear natural frequencies in forward modes are a little greater than their backward counterparts.
The absolute values of nonlinear natural frequencies are increased in forward modes by the spin speed of the rotor, while they decreased for the backward nonlinear natural frequencies.
The nonlinearity leads to decrement in the absolute values of natural frequencies comparing with the linear model such that the nonlinear natural frequencies are lower than their linear counterparts. This difference is more intensified in the higher modes of vibrations and greater spin speeds.
The predicted linear and nonlinear natural frequencies are nearly similar in the fundamental mode but they deviate more in higher frequencies. For higher modes, the present results are less than the frequencies obtained from the linear model. This shows that the effect of stretching nonlinearity of the rotor decreases the stiffness of the system in the higher frequency vibrations. Also, this shows that the effect of stretching nonlinearity is more evident at higher frequencies.
The nonlinear natural frequencies are increased as the radius-to-length ratio of the rotor increased. The variation in the nonlinear natural frequencies with respect to the radius-to-length ratio of the shaft has a linear form.
For some values of the rotating speed lower than a specific value, the forward nonlinear natural frequencies are increased as the radius-to-length ratio of the rotor decreased, and for upper values of the rotating speeds than the specific value, the changes in the parameter affect the forward nonlinear natural frequencies inversely. This specific value is increased for the higher vibrational modes. This result is not observed for backward nonlinear natural frequencies. The effect of this parameter on the forward nonlinear natural frequencies is intensified as the higher modes are excited also for higher spin speeds of the rotor (greater than the specific value for forward nonlinear natural frequencies).
Footnotes
Appendix 1
Academic Editor: Aditya Sharma
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.