
Abstract
This article deals with the problem of improving the seismic strength of mechanical structures using a tendon system as actuation device. It consists of a pair of tension cables transmitting a control torque to the structure at the moment arm position. The purpose of the article is to establish the analytical framework consisting of mathematical modeling of cantilever beam under active tendon structural control, analyze the stability, and determine the physical characteristics of tendon system leading to the suppression of horseshoes chaos. The control efficiency is found by analyzing the behavior of the controlled system through the Melnikov methods. We also provide the critical control gain parameters leading to the efficiency of the control process.
Introduction
For years, the problem of seismic-induced vibrations in mechanical structures has received broad attentions. It has now reached the stage where active systems have been installed in full-scale structures.1,2 This article demonstrates theoretically a possibility of implementation of active tendon control to a full-scale structure under actual ground motions. One method used to handle this problem is the installation of automatic active control forces in mechanical structures as mentioned by Yao. 3 A number of structural concepts have been identified 4 which allow rigid body control and four concepts (Base Isolation, Hysteretic Device System, Tendon System, and Pagoda System) have been suggested for seismic control. 5 Among those, active control using tendons has been one of the most promising techniques to implement control mechanisms.6–9 These systems consist of a set of prestressed tendons connected to a structure where a servomechanism controls their tensions. The tendon is generally modeled as a simple spring or as a spring and dashpot in parallel. This simplicity makes it attractive and also helpful for retrofitting or strengthening an existing structure.
Figure 1 illustrates the idea of a tendon control system for suppressing cantilever beam vibrations. A pair of actuators at the beam root activates the tendons (i.e. tension cables) to rotate a pair of moment arms attached at a proper position of the structure. Thereby, the beam motion is actively controlled using the feedback signals from sensing devices located on top of the beam. The tendon control is suitable to this task not only because the hardware is simple to implement but also because a robust collocated control is realized using “non-collocated” sensors and actuators.8,9
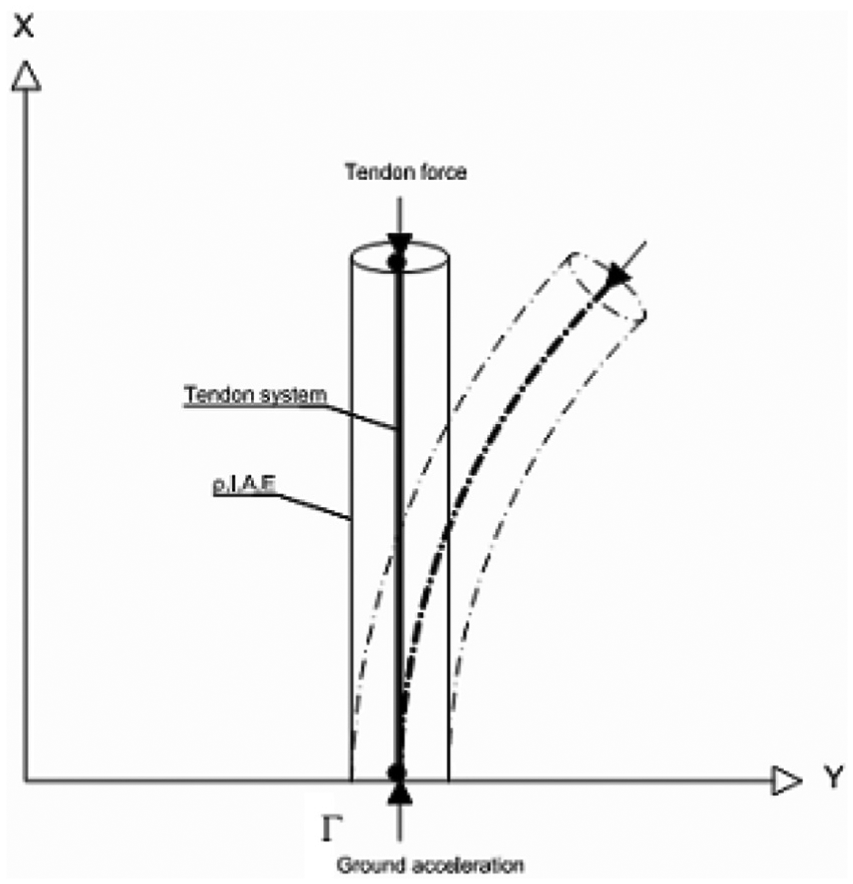
Tendon system concept on a cantilever beam.
In this article, we are interested by the condition for which tendon system could avoid the global bifurcation before and after loss of stability.10,11 Since these conditions can be detected by means of basin of attraction, it is important to obtain the criteria for theoretically quenching chaotic dynamics. This may imply the existence of fractal basin boundaries and the so-called horseshoes structure of chaos. It will be shown that under suitable hypotheses, chaos arises quite naturally in the dynamics of the cantilever beam subjected to seismic action. Chaotic motions of a beam were earlier studied by Holmes and Marsden, 12 and a general review of the application of the theory of chaos to elastic structures can be found in some previous works.13,14 Melnikov method developed by Guckenheimer and Holmes 15 is employed for chaos detection in the system. This corresponds to the occurrence of transverse heteroclinic intersections.
The cantilever beam model with tendon system control is illustrated in section “General mathematical formalism of a cantilever beam under tendon system control subjected to seismic action,” where the exact equation of planar motion is also obtained. In section “Effect of tendon system control on the stability of control design and on the appearance of horseshoes chaos,” we analyze static bifurcation behavior, which involves transverse intersection between perturbed and unperturbed separatrix. Therefore, the critical parameters of the tendon system under which bifurcation is suppressed are pointed out. Section “Conclusion” is devoted to conclusion.
General mathematical formalism of a cantilever beam under tendon system control subjected to seismic action
Consider a cantilever beam of length l, with density
where

where
The cantilever beam is fixed at its base

Carrying out the conventional Galerkin averaging, we obtain a set of

with
We remind readers of the following

where
To compute these quantities, we utilized Maple and after some algebraic manipulations, we have obtained

The earthquake signal can be modeled as filtered white noise process, while the filter design is based on a prescribed spectrum of ground motion. 16 Here, the Kanai–Tajimi spectral description of the ground motion is used

where

where

where
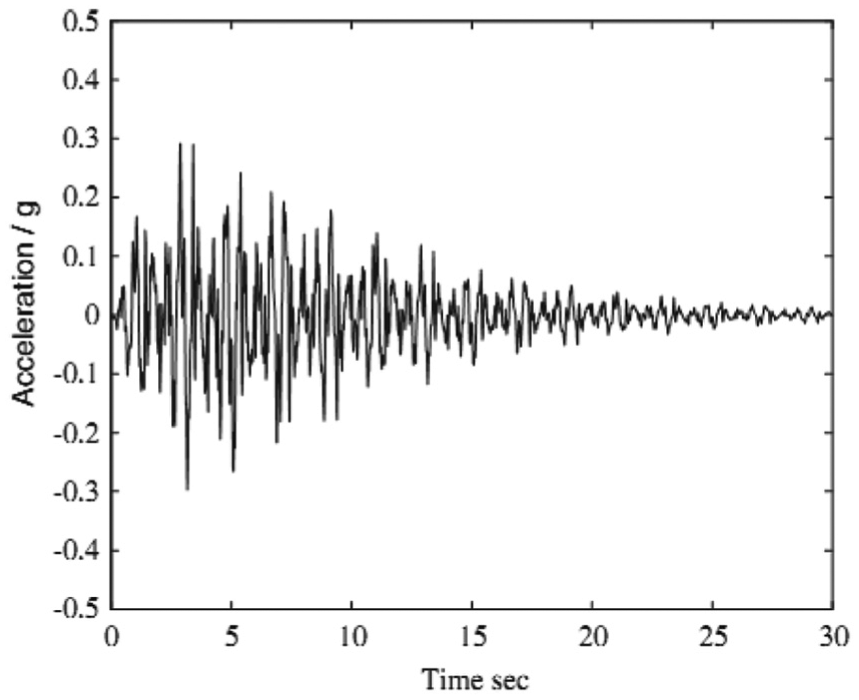
Critical acceleration applied to the system.
Effect of tendon system control on the stability of control design and on the appearance of horseshoes chaos
On the stability of the control design
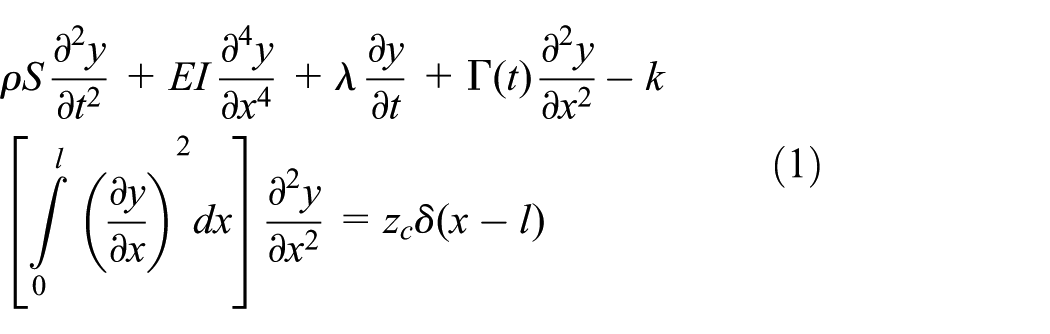
We assume that the tendon system is locked to provide the maximum suppression of oscillations. Then, the amplitude dynamics describes the rate of amplitude change depending on the physical parameters of the controlled system. Taking into account all the component acting on the system, the non-dimensional governing equation describing the physical system under tendon control is given by

In the autonomous case, the system’s stability is explored using the Lyapunov concept that examining the fundamental solution

which is known as a quasipolynomial. To study the stability of the controlled system with respect to the control gain parameters

Effect of tendon parameters on the stability of the control system: (a) time history without tendon and (b) time history with tendon.
On the appearance of horseshoes chaos
Holmes and Marsden 12 have studied the buckled beam subjected to linear damping and periodic transverse forcing. They presented a Melnikov-type technique for a class of infinite-dimensional systems and gave a criterion under which the Smale horseshoes chaos appears. In fact, the Melnikov theory has been developed to predict the splitting of homoclinic or heteroclinic orbits under non-autonomous perturbations. In particular, it can be used to establish the existence, or non-existence, of transverse homoclinic or heteroclinic orbits in dynamic systems upon adding small non-autonomous terms to the governing vector field. Transverse homoclinic or heteroclinic orbits, in turn, imply the existence of horseshoes, and therefore of chaotic dynamics. The basin of attraction is generally used as an indicator for the existence of horseshoes chaos. In this work, one would like to know how the control strategy affects the Melnikov criterion or in what range of the control parameters the heteroclinic chaos in our model could be inhibited? To deal with such a question, let us express the dynamic structure as follows

where

known as the separatrix orbit, passing through the hyperbolic fixed points. Thus, we can compute the Melnikov function11,12 and obtained the following result

where

with

From equation (11), we get the condition for the appearance of the Melnikov chaos in the space parameters

Figure 4 displays the domain in parameter space

Region in space parameters
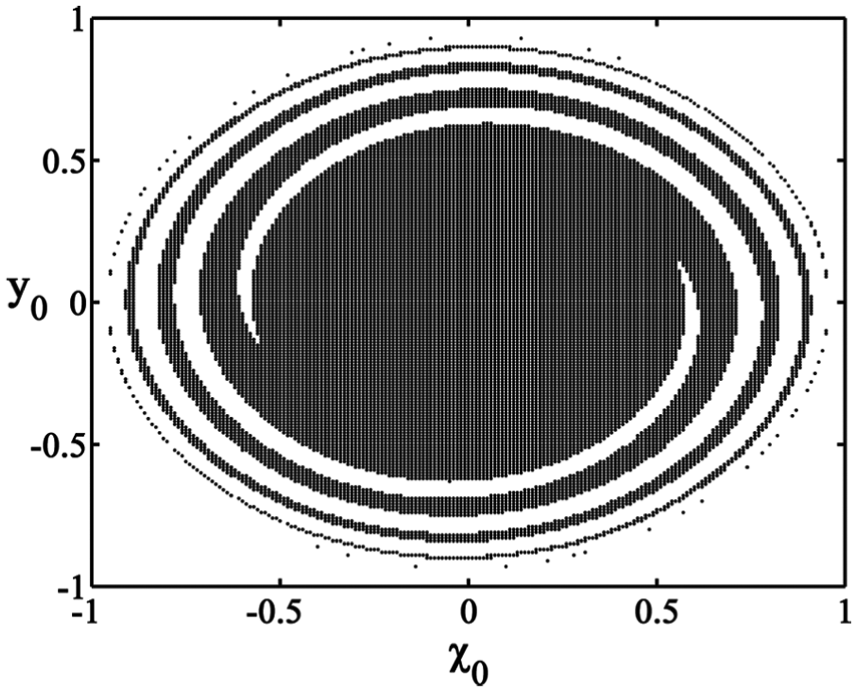
Figure 5 displays the basin of attraction for the control gain parameters taken in regions I and II. These figures confirm the previous investigation, since the boundary is regular for the control parameter taken in the good region and fractal for the other region. Taking into account the delay, Figure 6 shows that the basin where the boundaries were regular becomes fractal because of delays, meaning that the delays can disrupt the control strategy.

Basins of attraction for the case (a)
Appearance of fractal basin boundary because of delay:
Conclusion
This article describes the tendon control strategy in the case of a cantilever beam excited by earthquake. The mathematical modeling of the system under control takes into account the fact that, through the tendon, the kinetic and potential energy of the system is kept small, resulting in small displacements and forces. The concept is especially attractive for historical structures because their installation requires minimal intervention and can be easily removed without causing external visual impact. The earthquake model is expanded as a Fourier series, of unknown coefficients, that is modulated by an enveloping function. It appears after dynamics analysis that forces in the tendons that develop during the earthquake have a stabilizing effect on the structure. Focusing on the occurrence of chaotic dynamics so-called horseshoes chaos, the analysis using Melnikov theory shows the effectiveness of the control strategy presented here in the sense that by taking into consideration a selective viscoelastic parameter of the tendon system, one can completely suppress the appearance of horseshoes chaos in the system. Those predictions are confirmed and complemented by the numerical simulations from which we illustrate the fractal nature of the basins of attraction. It can be viewed that the threshold amplitude of earthquake excitation for the onset of chaos will move upward as the physical parameters are taken in a good region.
Footnotes
Academic Editor: Francesco Massi
Declaration of conflicting interests
The author(s) declared the following potential conflicts of interest with respect to the research, authorship, and/or publication of this article: B.R.N.N. was financially supported by Alexander von Humboldt Foundation within the Georg Forster Fellowship.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.