
Abstract
Conventional reliability assessment and reliability-based optimal design of belt drive are based on the stress–strength interference model. However, the stress–strength interference model is essentially a static model, and the sensitivity analysis of belt drive reliability with respect to design parameters needs further investigations. In this article, time-dependent factors that contribute the dynamic characteristics of reliability are pointed out. Moreover, dynamic reliability models and failure rate models of belt drive systems under the failure mode of slipping are developed. Furthermore, dynamic sensitivity models of belt drive reliability based on the proposed dynamic reliability models are proposed. In addition, numerical examples are given to illustrate the proposed models and analyze the influences of design parameters on dynamic characteristics of reliability, failure rate, and sensitivity functions. The results show that the statistical properties of design parameters have different influences on reliability and failure rate of belt drive in cases of different values of design parameters and different operational durations.
Introduction
Belt drives are comprehensively used to transmit power and motion in a variety of machinery, such as automobile, household appliances, office machinery, and so on. As a common form of mechanical transmission, the schematic structure of the belt drive system is shown in Figure 1. A typical belt drive system is mainly composed of a drive pulley, a driven pulley, and belts. Motion and power are transferred from the drive pulley to the driven pulley via the friction between the belt and pulleys.1–6 The reliability of the belt drive system plays an important role in the risk assessment and optimal design of mechanical products. Therefore, it is necessary to develop accurate reliability models of belt drive systems. In this article, we will be concentrated on dynamic reliability analysis of belt drive systems with input power transmitted by friction between belt and pulleys, such as the flat-belt drive systems and the V-belt drive systems.

Schematic structure of belt drive.
In the last few decades, many investigations have been made into proposing reliability models of belt drive systems. An et al. analyzed the influences of belt length deviation on the power transmitted by the multiple belt drive systems and defined the failure criterion of the multiple belt drive systems. Then, reliability models were developed via modeling the system as the weighted k-out-of-n system based on the universal generating function technique. 7 Sun et al. 8 presented a new method for life calculation of the V-belt with different reliability. Sun and Zhao 9 proposed an approach to optimal design of belt drive systems by combining the conventional carrying capacity analysis of belts and reliability-based optimization design theory. These reliability models provide the theoretical framework for reliability evaluation of belt drive systems.
Conventional reliability models of belt drive systems under the failure mode of slipping are mainly static models with the ultimate tension and the working stress taken as two random variables. However, the fluctuating working load and the degradation of friction coefficient contribute to the dynamic behavior of reliability of belt drive systems. In this article, the concept of dynamic reliability is adopted to indicate that the reliability is the function of time. Many researches have been performed to investigate dynamic reliability models of various technological systems. Wang and Xie 10 developed a dynamic component reliability model using order statistics and probability differential equations. Zhu et al. 11 presented fatigue reliability models based on the estimation of the evolution and probabilistic distribution of fatigue damage over time. Wang et al. 12 introduced two types of dynamic reliability models considering the fatigue crack growth. Hu et al. 13 proposed a method for time-dependent reliability analysis of composite hydrokinetic turbine blades. Furthermore, based on dynamic reliability analysis, it is necessary to develop dynamic sensitivity models, which are imperative to the optimal design of belt drive systems. In this article, we are concentrated on the reliability estimation under the slipping failure mode.
In the operational process, the friction between the belts and the pulleys, which is usually termed as effective tension, provides the power to complete intended mission. The friction cannot exceed its ultimate value that is determined by the initial tension on the belt drive. When the working load exceeds the ultimate effective tension, slipping could occur, which significantly affects the normal operation of the belt drive systems. In practice, slipping takes place frequently and always appears before the occurrence of fatigue fracture, which could result in a large economic loss. Therefore, it is imperative to perform the reliability analysis of belt drive systems under the failure mode of slipping. In current reliability models of belt drive, reliability is calculated using the stress–strength interference (SSI) model. The ultimate effective tension is taken as the generalized strength, and the working load is treated as the generalized stress. Failure could occur in the case where there exists an interference area between the probability density function (PDF) of the ultimate effective tension and the PDF of transmitted load. 14 Then, reliability can be obtained by calculating the probability that the system normally operates. However, in some circumstances, it is difficult to directly utilize the existing reliability models for reliability assessment of belt drive systems, which is listed in the following.
Oil contamination and abrasion could cause the quality decline of the contact surfaces, which leads to the decrease in ultimate effective tension. Moreover, the decrease in ultimate effective tension takes place gradually with time. Therefore, reliability presents obvious dynamic characteristics. It is necessary to develop dynamic reliability models of the belt drive systems under the slipping failure mode. In addition, the sensitivity analysis of the reliability to design parameters of belt drive systems, which has not been reported, is critical to the optimal design of belt drive. The purpose of the sensitivity analysis is to explore the response of system reliability to the change of the design variables. Most reliability-based sensitivity models are static models. Considering the dynamic characteristics of reliability, the sensitivity function should also be time dependent. Dynamic sensitivity analysis is useful for dynamic optimal design and decision making of maintenance and replacement strategies.
To address these problems, time-dependent factors that contribute the dynamic characteristics of reliability are pointed out. Moreover, dynamic reliability models of belt drive systems are developed in this article. Furthermore, both static sensitivity models and dynamic sensitivity models of belt drive systems are established. The proposed models are helpful for stable design of belt drive systems. The remainder of this article is organized as follows: In section “Static reliability and sensitivity models of belt drive systems,” stress analysis and sensitivity analysis of static reliability of belt drive systems are carried out. In section “Dynamic reliability models of belt drive systems,” dynamic reliability models and dynamic sensitivity models of belt drive are developed. In section “Numerical examples,” numerical examples are given to illustrate the proposed models and analyze the influences of design parameters on dynamic characteristics of reliability, failure rate, and sensitivity functions. Finally, conclusions are summarized in section “Conclusion.”
Static reliability and sensitivity models of belt drive systems
In the installation process of the belt drive device, the belts have to be preloaded to assure sufficient friction between the belts and pulleys for the transmission of motion and force. The initial tension is denoted by F0. As shown in Figure 2, at the beginning of the operation of the belt drive, belt span 1 and belt span 2 are subjected to identical force of F0. When the belt drive device starts to work, the force on belt span 1 increases from F0 to F1, while the force on belt span 2 decreases from F0 to F2. Provided that the total length of belt keeps constant and the deformation occurs within the elastic range, F0, F1, and F2 satisfy the following condition 9


Force diagram of belt.
When the belt drive device operates normally, the transferred load is less than the ultimate effective tension, and slipping does not occur. In this case, the variation of force in belt span 1 and belt span 2 can be expressed by

where


Hence, the effective tension can be derived as follows

Denote the cross section of the belt by A, the stress on belt span 1 and belt span 2 caused by F1, F2, and Fe can be calculated by



In addition, when the effective tension reaches its ultimate value, slipping tends to take place. In this circumstance, according to the Euler formula, the relationship between F1 and F2 can be given by 9

where


The ultimate effective tension can be computed as

The ultimate stress can be calculated by

When considering the randomness of the working stress
From the theory of material mechanics, the longitudinal stiffness of belt can be given by 15

where E is the elastic modulus of belt and a is the center distance between the drive pulley and the driven pulley. Thus, equation (14) can be further expressed by

For descriptive convenience, denote

Denote the mean value and standard deviation of


The reliability can be further derived as follows

The corresponding sensitivity with respect to the mean value and the deviation of x1 and x2 can be given by




Dynamic reliability models of belt drive systems
In practice, oil contamination and abrasion could result in the decline in the quality of the contact surfaces, which is reflected by the gradual degradation of the friction coefficient between the belt and the pulleys. Hence, from equation (12), it can be learnt that the ultimate effective tension will also gradually decrease. The decrease in the capacity of transferring working load significantly influences the reliability of the belt drive systems. Moreover, the stress caused by external load could increase due to the existence of the gradual growth of the micro-cracks. To measure the reliability variation with time, dynamic reliability models of belt drive systems are developed in this section. Moreover, the influences of design parameters on dynamic reliability are also analyzed in this section.
The initial tension F0 is an important design parameter of the belt drive, which could vary in practical installation process and should be treated as a random variable. Denote the PDF of F0 by

The procedures for dynamic reliability modeling can be summarized in Figure 3.

Procedure flowchart for dynamic reliability modeling.
The corresponding failure rate can be further derived as follows

Therefore, the dynamic sensitivity of the belt drive system with respect to the mean value and the standard deviation of F0 can be expressed as follows

Provided that the degradation of the friction coefficient is not taken into consideration, equation (25) reduces to

The corresponding failure rate can be derived as follows

The dynamic sensitivity of the belt drive system with respect to the mean value and the standard deviation of F0 can be expressed as follows

From equations (29) to (32), it can be learnt that even if the friction coefficient stays constant, the reliability could change with time owing to the randomness of F0 and the dynamic statistical characteristics of working stress. It should be noted that the proposed reliability models are dependent on the degradation law of the friction coefficient. For the fitting of the degradation law of the friction coefficient, it is assumed that the friction coefficient degradation occurs gradually. The operational duration is divided into a series of subintervals with the friction coefficient in each subinterval remaining constant. Then, curve fitting techniques are adopted to obtain the degradation law of the friction coefficient by testing the friction coefficient in each subinterval.
Numerical examples
In this section, numerical examples are given to illustrate the proposed models and analyze the influences of design parameters on reliability, failure rate, and sensitivity functions. The material and geometric parameters of the belt drive system and the working load parameters are listed in Table 1. s and

Material and geometric parameters of the belt drive and load parameters.

To validate the proposed dynamic reliability models, a Monte Carlo simulation is carried out in this section with the flowchart shown in Figure 4. The results from the Monte Carlo simulation and the results from the proposed models are shown in Figure 5.

Flowchart of Monte Carlo simulation.

Reliability from Monte Carlo simulation and reliability from the proposed models.
From Figures 4 and 5, it is learnt that the simulation results show good agreement with the proposed model. In addition, the static reliability, the dynamic reliability without degradation of friction coefficient, and the reliability considering friction coefficient degradation are shown in Figure 6. The failure rate without degradation of friction coefficient and the failure rate considering degradation of friction coefficient are shown in Figure 7.

Reliability of belt drive.

Failure rate of belt drive.
From Figures 6 and 7, it can be seen that in the reliability estimation under the failure mode of slipping, it could cause large error to utilize traditional reliability models due to neglecting the time-dependent factors that have great influences on reliability. The ultimate effective tension gradually decreases owing to friction coefficient degradation, which obviously accelerates the drop speed of reliability. Besides, even without the friction coefficient degradation, reliability could decline due to the time-dependent statistical characteristics of working stress in different time periods. These time-dependent factors contribute the dynamic characteristics of reliability and should be taken into consideration in the optimal design of belt drive device. In addition, friction coefficient degradation results in an obvious increase in the failure rate of belt drive system and makes the failure rate curve present the feature of the wear-out period of the bathtub curve, while only the feature in the infant mortality period and the random failure period of the bathtub curve is found in the failure rate curve of the belt drive system without friction coefficient degradation taken into consideration.
In addition, considering the friction coefficient degradation, the reliability and the failure rate in the cases of different dispersions of F0 are shown in Figures 8 and 9, respectively.

Reliability of belt drive in cases of different dispersions of initial tension.

Failure rate of belt drive in cases of different dispersions of initial tension.
The dispersion of
Additionally, the sensitivity of static reliability with respect to the mean value and standard deviation of

Sensitivity of the static reliability with respect to µ(F0).

Sensitivity of the static reliability with respect to σ(F0).

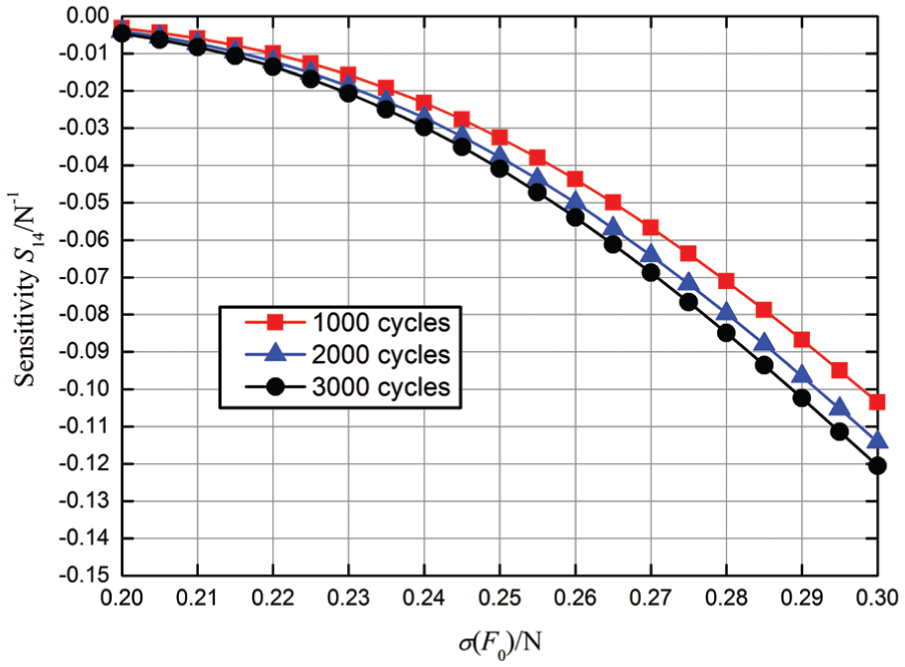
Sensitivity of the dynamic reliability with respect to µ(F0) without friction coefficient degradation.
Sensitivity of the dynamic reliability with respect to σ(F0) without friction coefficient degradation.
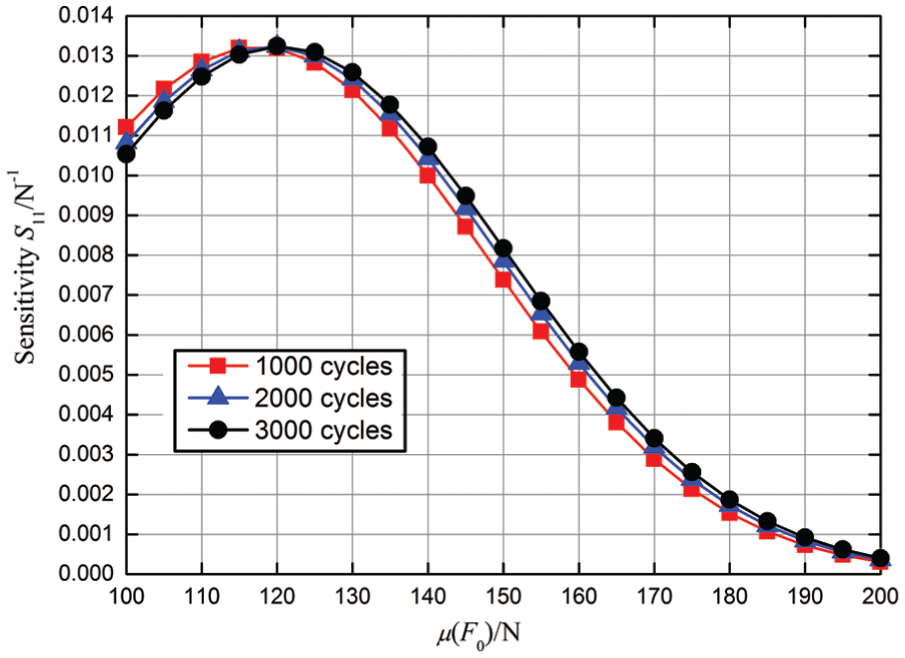
Sensitivity of the dynamic reliability with respect to µ(F0) with friction coefficient degradation.

Sensitivity of the dynamic reliability with respect to σ(F0) with friction coefficient degradation.
In general, an interval of a design variable with low sensitivity is desirable for robust system design. In this section, static sensitivity curves presented in the numerical examples can provide a guidance for readers to find the robust area for system design. From Figures 10–15, it can be learnt that there exists large difference between the sensitivity of static reliability and the sensitivity of dynamic reliability with respect to the statistical parameters of
Conclusion
In this article, the sensitivity models of the belt drive based on traditional reliability models are proposed in this article, which can be used to analyze the influences of the statistical properties of design parameters on static reliability and optimal design of belt drive. Furthermore, time-dependent factors that contribute the dynamic characteristics of reliability are pointed out, and dynamic reliability models as well as failure rate models of belt drive systems are developed. When considering the random load fluctuation and the degradation of friction coefficient, dynamic variation of system sensitivity with time has to be taken into account. Thus, dynamic sensitivity models of the belt drive are established, which can be used to calculate the system sensitivity in different time periods of operation and demonstrate the time-dependent variation of the robust area for life-cycle management and design of belt drive systems. Besides, numerical examples are given to illustrate the proposed models and analyze the influences of design parameters on dynamic characteristics of reliability, failure rate, and sensitivity functions. The results show that the statistical properties of design parameters have different influences on reliability and failure rate of belt drive in cases of different values of design parameters and different operational durations. Therefore, dynamic influences of the design parameters on system reliability and failure rate in the full life cycle of belt drive should be taken into consideration, which are important in the decision making of design, manufacturing, installation, and maintenance of belt drive.
The equivalent coefficient of friction of the belt drive system is affected by many factors. In this article, the transmission ratio and the speed of belt transmission, which have significant influences on equivalent coefficient of friction, are assumed to be deterministic when performing a reliability analysis. A further investigation of the influences of these key factors on reliability of belt drive systems will be carried out in our next work.
Footnotes
Academic Editor: Yongming Liu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by National Natural Science Foundation of China (grant no. 51505207), Scientific Research Fund of Liaoning Provincial Education Department of China (grant no. L2015298), Liaoning Provincial Natural Science Foundation of China (grant no. 2015020152), and National Natural Science Foundation of China (grant no. 51335003).