
Abstract
The issue of distributed cooperative path tracking control for multi-vessel in the presence of ocean currents has addressed in this article. The proposed cooperative control approach is achieved by designing the guidance system and the control system. In order to achieve the multi-vessel’s coordination with the desired spatial formation, the guidance system is designed based on the strategy of virtual leader for supplying the desire path and relevant parameters for each vessel. In addition, a robust cooperative path tracking controller is designed to reject the disturbance of unknown ocean currents using the backstepping method and the adaptive control technology. The synchronization between all the vessels is achieved by defining same path parameter and same speed along the path through the guidance system. Global asymptotic stability is guaranteed by Lyapunov-based technique for the whole control system. The effectiveness of the proposed cooperative path tracking control method is demonstrated by numerical simulation.
Introduction
Recently, coordination control has been receiving increasing attention as an area of research due to the broad applications in many fields, 1 for example, formation control of robots on ground, 2 formation control of aircrafts in the air, 3 cooperative control of satellites in space, 4 and cooperative control of marine vessels on the ocean surface. 5 In spite of the application areas being different, coordination control technology is committed to performing some complex tasks which are infeasible, inefficiency, or poor reliability for a single agent. Considering the wide applications prospect and potential advantages of coordination control, more and more achievements of this research are reported in recent years. This article addresses cooperative path tracking controller design for multi-vessel, which is often applied in many marine applications such as underway replenishment and marine resources surveying.
The path tracking control 6 is often studied for marine vessel as a common operational mode. The cooperative path tracking control approach is developed mainly in this article. A large number of relevant results for cooperative path tracking control are reported in the existing literature works. For instance, the problem of cooperative path tracking control is discussed based on the nonlinear cascade system theory for multiple underactuated marine vessels. 7 The same problem is discussed based on the Lyapunov direct method. 8 The cooperative path tracking control approach is proposed by defining the formation reference point (FRP) for each vessel. 9 The cooperative path tracking operation is also achieved through a designed synchronization control law for path parameters by Ihle et al.10,11 A common trait in above results is that the coordination operation is performed by pre-defining respective desire path for each vessel and then designing synchronization control law of these path parameters from all the marine vessels. However, in the case of the task transformation or have an accident, the path for each vessel must be re-planed to guarantee the coordination operation can continue to be executed. With respect to this shortcoming, the problem of cooperative path tracking control is discussed by decoupling the formation control in space and the consensus for the path parameters in time. 12 In addition, CF Thorvaldsen and R Skjetne 13 designed the cooperative path tracking controller by dividing into two tasks, that is, coordination and path following. In which, one marine vessel is assigned as the leader and broadcast reference signal to other vessels. However, once the leader vessel changed, the corresponding controller requires re-designing to continue broadcasting reference signal, and the coordination controller requires re-designing when the marine task changed. Furthermore, different kinds of controller for some common tasks need to be included in the control system for practical marine applications, thereby requiring to design coordination controllers for different tasks and to consider the safety switch, the overall integration, and the test of these controllers.
Marine vessel is inevitably subject to the disturbance of the external environment in many practical applications. There are many approaches used to deal with the problem of disturbances.14,15 Robust control methods and adaptive control technology are effective for disturbance rejection.16–19 Robust control for a single vessel is studied greatly during the past decades.20–22 In the most existing results, the disturbance rejection is achieved by compensating this force or moment acted on the vessel, which is often calculated according to the empirical equation. Recently, robust coordination control has attracted increasing attention for multi-vessel in the presence of marine environment disturbances such as wind, wave, and current.23–25 For example, the cooperative path-following control of multi-vessel is studied against the disturbance of ocean currents in many literature works.26,27 In this article, robust cooperative path tracking control for multi-vessel in the presence of ocean currents is studied. The designed coordination controller can guarantee not only the robustness for the external disturbances but also the operational performance and holding the desired spatial formation. The choice of the coordination strategy is very important for this problem. Obviously, the virtual leader strategy 28 is a better choice because the ocean environment disturbance for the virtual leader does not need to be considered. In addition, there are many benefits of introducing a virtual leader. For example, the virtual leader strategy is convenient to define the desired position of each vessel in the desired spatial formation. This coordination strategy is simple to design the coordination control law, because it does not need to design the synchronization law of path parameters of all the vessels. The virtual leader strategy does not need to re-plan the desired path for each vessel, but just plan the path for the virtual leader, in the case of the task transformation or have an accident.
Motivated by the above advantages of the virtual leader strategy, a guidance system is designed for each vessel based on the virtual leader strategy. In addition, the distributed robust cooperative controller is designed for multi-vessel in the presence of ocean currents to accomplish the task of path tracking. Compared with the existing results, the designed robust cooperative controller is relatively easy to achieve in the practical applications. The cooperation operations are achieved as long as the controller for the corresponding task is activated. The disturbance of unknown ocean currents is compensated according to the corresponding algorithm and no measuring sensor is required. Furthermore, this cooperation method is also applicable to the formation with different vessels. The main contribution of this work is that the guidance-control structure is applied to design the cooperation controller, and a robust cooperative path tracking control method is proposed based on the virtual leader strategy. The proposed coordination control algorithm is achieved by designing a guidance system for each vessel to supply the desired path and the desired speed along the path for each vessel and by designing the robust path tracking controller using the backstepping and adaptive control technology to guarantee online estimation and compensation of ocean current disturbance.
This article is organized as follows. First, the modeling of marine vessel in the presence of ocean current is reviewed. Second, the detailed design of the robust cooperative path tracking control algorithm for multi-vessel is presented. Third, the effectiveness of the proposed cooperative control method is demonstrated by numerical simulation. Finally, the conclusion of this article is given.
Modeling of marine vessel in the presence of ocean current
The problem of cooperative path tracking is addressed for multi-vessel in the presence of ocean currents in this article. Define the speed of ocean current as

where

In order to simplify the modeling of marine vessel, the movement in the horizontal plane is considered. Hence, the angle of attack

where

where

The velocity of ocean current is often assumed to be constant due to its velocity being constant or slowly varying in a certain period of time. For marine vessel, the vector of north, east position, and heading in the earth frame is defined as

Hence, the mathematical model of marine vessel in the presence of irrotational ocean current is described as 29

where

It satisfies
The robust cooperative path tracking control scheme
In this section, the robust cooperative path tracking control scheme is designed in detail. The coordination operation among vessels is achieved by assigning a virtual leader. Let each vessel be identified by a unique identifier in the set

The sketch of the coordination strategy.

The diagram of the distributed coordination control structure.
The guidance system design
The expected path for the virtual leader is denoted as

where

Hence, the desired velocity of each vessel is

where
The robust cooperative path tracking controller
The detailed design process of the cooperative path tracking controller is given by the following:
Step 1. Define the position error of each vessel as

Assuming that the estimated value of ocean current is

The time derivative of equation (12) yields

Supposing a virtual velocity

The desired speed along the path is defined as

Define a first Lyapunov function as

Differentiating the above equation yields
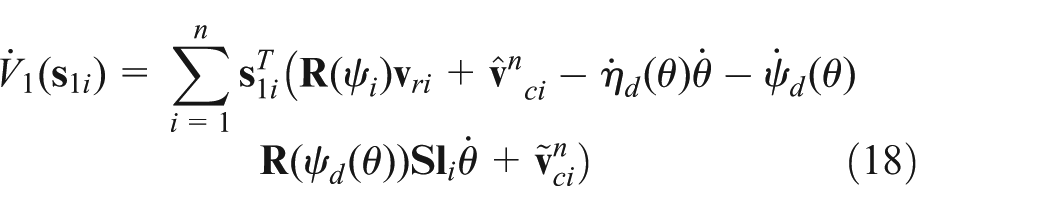
According to equations (15) and (16), the above equation can be re-expressed as

The virtual velocity can be chosen as

where
In order to facilitate the next design, define a regulating function of along-path speed tracking error for each vessel as

Then, equation (19) can be changed to be

If
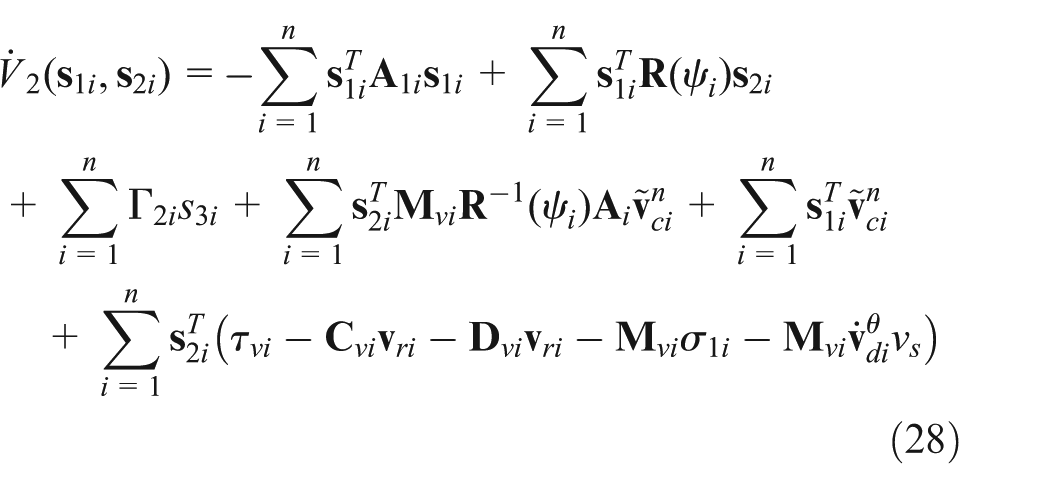
Step 2. A second Lyapunov function is defined as

Differentiating the above equation yields

The time derivative of

where*****

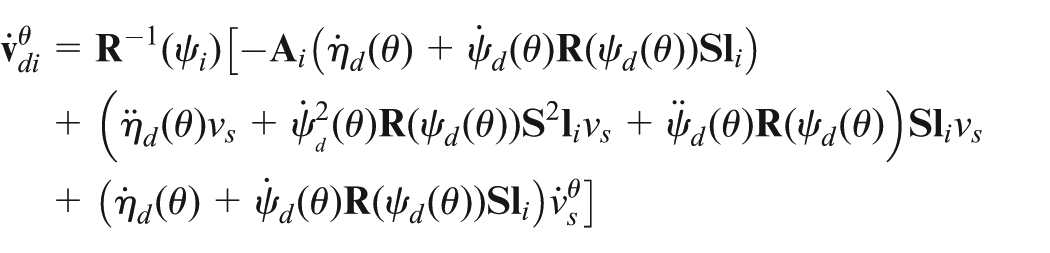

Hence, we have

Re-define the regulating function of along-path speed tracking error for each vessel as

Thus, equation (26) becomes
The control input for each vessel is chosen as

where

Step 3. The disturbance for each vessel only considers the irrotational ocean current in this article, so the last component of
A third Lyapunov function is defined as

where

The ocean current is often changed slowly,

The time derivative of equation (31) becomes
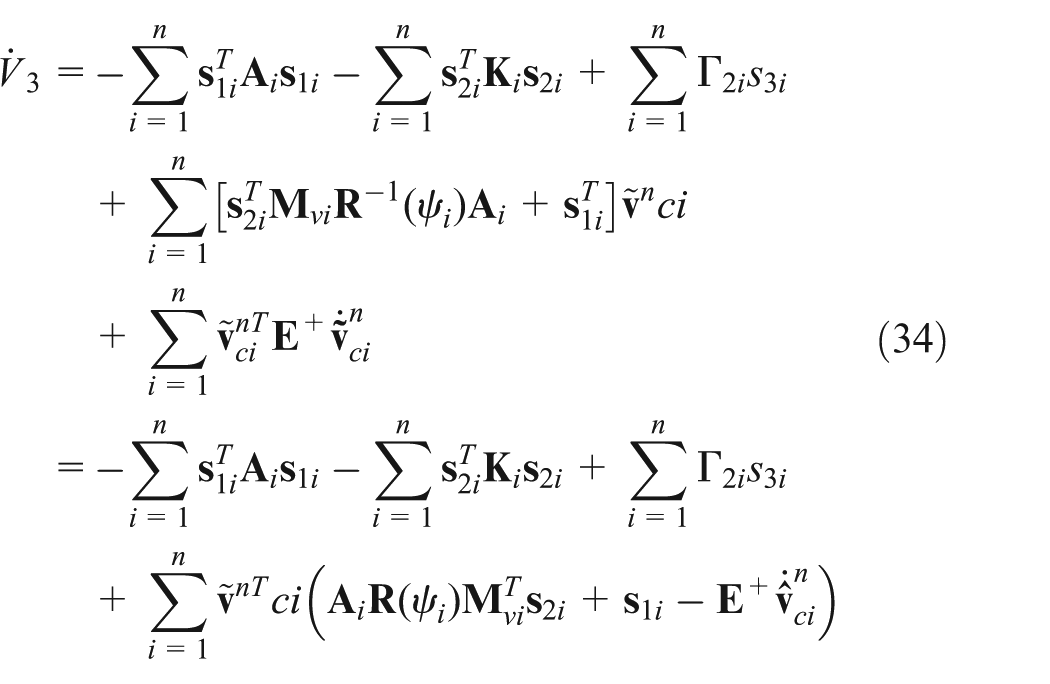
The adaptation laws for

Thus, we have

Step 4. In order to achieve online update of the path speed regulation function, the filter-gradient update method in the literature 8 is adopted, that is

Define a fourth Lyapunov function as

The time derivative of

According to the above equation, we can see the whole control system is stable as long as the gain matrix
Theorem
For n marine vessels with the disturbance of ocean currents, the coordination control input (equation (29)), the adaptive control law (equation (35)), and the online update law for path speed (equation (37)) can guarantee the global asymptotic stability of the whole control system. Namely, the task of cooperative path tracking can be achieved for multi-vessel.
Proof
Define a state vector
According to the above equation, we can see that if we choose

then we have

Namely

The time derivative of equation (40) is

If we choose

thus

It can be known that
Numeral simulation
The effectiveness of the robust cooperative path tracking controller is demonstrated numerically for five marine vessels with ocean currents in this section. The model coefficients of all the vessels are given in the literature.
13
The initial locations of these vessels are as follows:
Figure 3 illustrates the plane movement of these marine vessels while holding the desired formation structure. The heading change of all the vessels in the whole cooperative path tracking process is shown in Figure 4. As can be seen, all the marine vessels perform the cooperative path tracking with the desired performance and the heading of all the vessels tends to be synchronous in a short time, despite existing disturbances of the ocean currents.
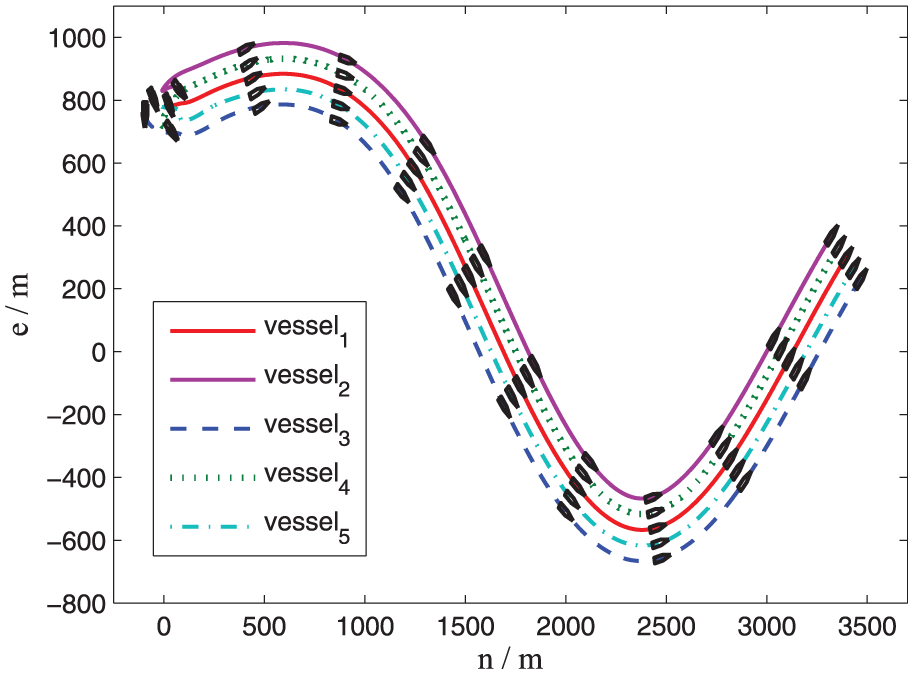
The plane motion of vessels.

The heading changes of vessels.
Due to the limitation of the vessel sensor, the current velocity cannot be measured accurately. The estimated value of ocean current can be achieved by the designed adaptation laws. The changes in the estimated values of ocean current in the directions of north and east are shows in Figure 5. The estimation error of the current is shown in Figure 6. From the above figures, the current velocity can be estimated using the designed adaptation laws by choosing appropriate control matrix.

The estimated value of current.

The estimated error of current.
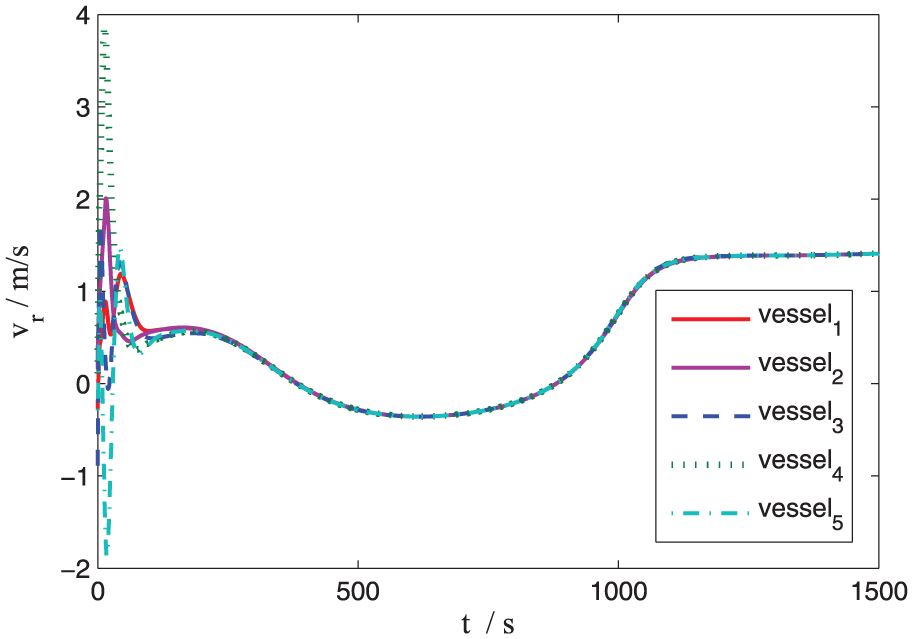
The dynamic model is described using the relative velocity between vessel and ocean current. Thus, in the whole cooperative path tracking process, the relative surge and sway velocity in the body frame are shown in Figures 7 and 8, respectively. The relative yaw velocity in the body frame is shown in Figure 9. From the changes of the relative velocities, we can obtain that the relative velocities of all the vessels tend to be synchronous within a specified tolerance range. In particular, the marine vessels move to the inflection point of the path, the relative velocities of the vessels cannot be completely synchronized in a certain degree, and after the inflection point, the relative longitudinal velocities and the relative lateral velocities of the vessels can reach the synchronization. The reason for this phenomenon is the inertia of the ship is relatively large, the maximum slope of the expected path is at the inflection point, and the vessels need to adjust speed in order to maintain transient formation structure near the point of inflection.

The relative surge velocities of vessels.
The relative sway velocities of vessels.
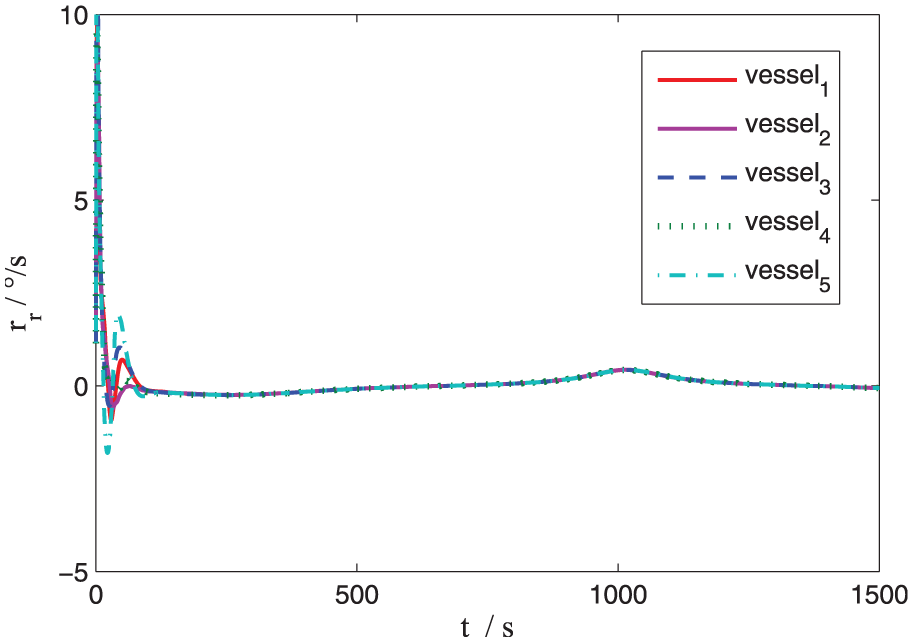
The relative yaw velocities of vessels.
Conclusion
This article presents a robust cooperative path tracking control approach for multi-vessel with ocean currents. The desired path and the corresponding path parameter for each vessel are supplied through the designed respective guidance system based on the virtual leader strategy. Considering the disturbance of ocean current, the robust cooperative path tracking controller is designed by applying the backstepping method and the adaptive control technique. Furthermore, globally asymptotically stability is guaranteed for the whole close-loop system. Finally, the effectiveness of the proposed robust cooperative path tracking control algorithm is confirmed by numerical simulations.
Footnotes
Academic Editor: Zheng Chen
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Fund of China (61503039, 61503040).