
Abstract
This article investigates the sampled-data disturbance rejection control problem for a class of non-integral-chain systems with mismatched uncertainties. Aiming to reject the adverse effects caused by general mismatched uncertainties via digital control strategy, a new generalized discrete-time extended state observer is first proposed to estimate the lumped disturbances in the sampling point. A disturbance rejection control law is then constructed in a sampled-data form, which will lead to easier implementation in practices. By carefully selecting the control gains and a sampling period sufficiently small to restrain the state growth under a zero-order-holder input, the bounded-input bounded-output stability of the hybrid closed-loop system and the disturbance rejection ability are delicately proved even the controller is dormant within two neighbor sampling points. Numerical simulation results demonstrate the feasibility and efficacy of the proposed method.
Keywords
Introduction
In this article, we consider a class of single-input single-output (SISO) system with mismatched uncertainties of the form
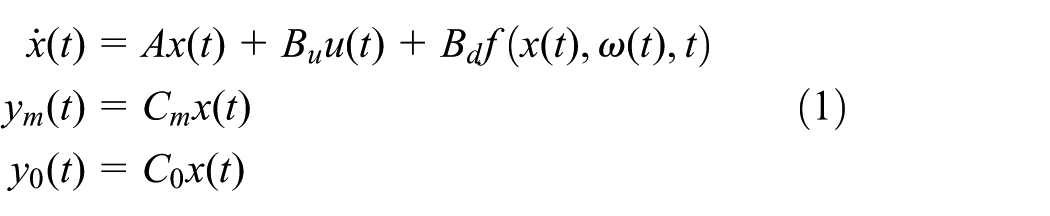
where
In modern control practices, it is a trend that sampled-data controllers with a zero-order holder (ZOH) are being digitally implemented into real-life plants with the rapid development of computational hardware technology. It is common that conventional control law design is always devoted to continuous-time design for mathematically modeled continuous-time systems due to the convenience of direct stability analysis, typically based on the continuously differentiable Lyapunov function analysis. In most practical implementation processes, continuous-time controllers can be discretized directly which exists on the fact that the closed-loop system performance can always be guaranteed while the sampling frequency is fast enough. However, in most of the times, this is done without a theoretical support, and the formulated restrictions of the sampling frequency and how it affects the controlled system performance are actually unknown. Moreover, only digital sensors are available for some real-life plants, for instance, Global Positioning System (GPS) is a discrete-time sensor and a radar is more naturally represented using a discrete-time model. 9 Hence, it is always a challenging but crucial issue to address the problem of designing sampled-data controllers which pursue smaller steady-state error, faster dynamical response, and milder noise susceptibility for system perturbed by matching or mismatched uncertainties.
In the literature, one of the most popular methods among those existing approaches developed to design sampled-data controllers for nonlinear plants is the discretization method.10–12 It employs a discrete-time approximation model of the plant (typically use Euler approximation) to design discrete-time controllers since it is almost impossible to obtain an exact discrete-time model of the continuous-time nonlinear plant. Hence, the results regarding this method are always achieved within a local or semi-global control goal. The emulation method, as a global control method, designs a continuous-time controller based on the continuous-time plant, followed by a discretization process to yield sampled-data controllers which will assure the continuous-time nonlinear plant by choosing an appropriate sampling period. One can refer to papers13–19 and the references therein.
In practical engineering, the control performance of modern industrial systems is inevitably affected by various uncertainties including parameter variations, unmodeled dynamics, and external disturbances.20–22 Active anti-disturbance technique is generally required in the controller design to access high-precision control performance.1,23–25 The extended state observer–based control (ESOBC) was originally proposed by Han,26,27 and it is made practical by the tuning method which simplifies its implementation and makes the design transparent to engineers. 1 Su et al. 28 presented the relationship between time-domain and frequency-domain disturbance observers and its applications for further information. However, most of existing disturbance rejection methods, including ESOBC, are concerned with continuous control approaches, which lack sound justification since most control approaches are digitally implemented in a sampled-data manner. To this end, the development of an active disturbance rejection method for system (1) with mismatched uncertainties will be of interest for both theoretical and industrial communities. Moreover, the mismatched uncertainties, rather than the so-called matching conditions4,20 are concerned to discover a generalized sampled-data disturbance rejection control law for system (1). Mismatched uncertainties may not act via the same channel with the control input and are regarded as a more general case concerned in uncertainty attenuation problems. As an example, the lumped disturbance torques in flight control systems always affect the states directly rather than through the input channels.23,29
This article presents a generalized sampled-data control law design based on a discrete-time extended state observer (ESO), which estimates the unmeasurable states and the lumped disturbance information in the sampling point. Explicit formulas to select the control gains and the tunable sampling period based on a detailed stability analysis for the hybrid closed-loop system are presented. Numerical simulations are shown to demonstrate the effectiveness of the proposed method. The proposed method will be a helpful guideline for direct digital implementation.
Main results
In this section, we present a step-by-step procedure to design a discrete-time ESO-based sampled-data control law to solve the global stabilization problem for system (1).
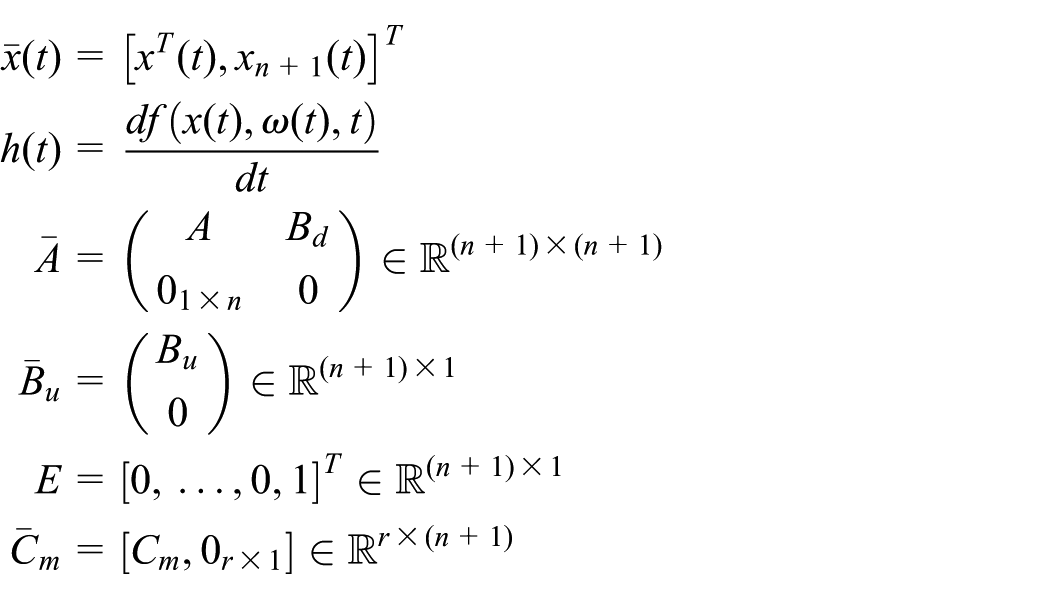
With an added extended variable

system (1) can be extended to the following form

with the denotation of
Assumption 1
Assumption 2
The lumped disturbances satisfy the following conditions: 20

In the article, the Assumption 2 is made on the disturbances
Construction of discrete-time ESO
In what follows, an ESO for system (1) will be built using the sampled-data information

where
The observer (3) can be rewritten as follows
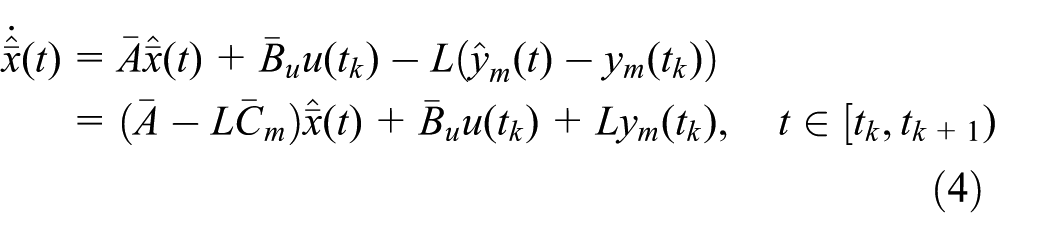
Integrating the continuous-time observer (4) from
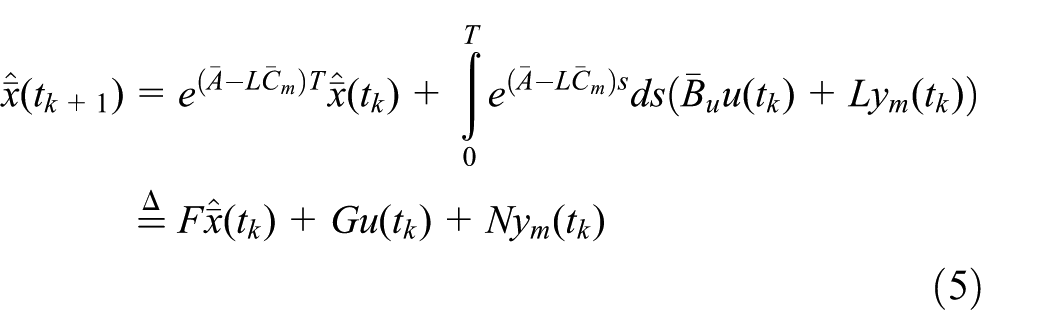
with the denotation of

The state and disturbances errors are defined as

Sampled-data disturbance rejection law design
The sampled-data disturbance rejection law can be designed as

where

Remark 1
With equation (7) in mind, the designed discrete-time extended observer can also be presented as

where
Hybrid closed-loop system stability analysis
Combing equations (1), (6), and (7) together, one can obtain the hybrid closed-loop system as

If we choose the observer gain L and the feedback gain

is also a Hurwitz one. Hence, there exists a positive definite matrix

where
Construct a positive definite and proper Lyapunov function

Now, we will estimate the items in the right hand side of equation (10). First, with
where
Since

where
Similar to equation (11), there exists a constant
Substituting equations (11) and (13) into equation (10) yields

Next, we introduce a lemma which plays a key role in the main theorem.
Lemma 1
There exist proper constants

Proof 1
Denote the whole closed-loop system (9) to be

where

Based on equation (17), applying the Gronwall inequality, we have

where
With Lemma 1 in mind, equation (14) becomes

with two positive constants
Theorem 1
Under Assumptions 1 and 2, with the following selection formulas for the parameter

and the observer gain L and the feedback control gain
Proof
Define
With equation (20) in mind, the following inequality can be concluded

Solving the above inequality with

which leads to

According to the condition (20), we have

which implies that
Remark 2
As one can mention, the discrete-time observer (8) will generate the same sampled information
Disturbance rejection analysis
In what follows, we will give a detailed disturbance rejection analysis to show the proposed ESO-based sampled-data disturbance rejection control law will effectively reject the lumped disturbances.
Theorem 2
Under Assumptions 1 and 2, the lumped disturbances from system (1) can be effectively rejected from the output channel in steady-state under the proposed sampled-data control law (7) provided that the observer gain L and the feedback control gain
Proof
Substituting the sampled-data controller (7) into system (1) yields

By Theorem 1, the following relations hold for the hybrid closed-loop system (1)–(7)–(8)

Hence, one can conclude from equations (26) and (27) that

which concludes that the lumped disturbances can be effectively rejected from the output channel in steady-state.
Remark 3
In this article, we assume some states of the systems are not measurable; hence, the proposed sampled-data control strategy has to be implemented by output feedback of the form of equation (7). If we consider the case that the states are available or can be easily measured, the sampled-data state-feedback control law can be simply designed as

where
Remark 4
Figure 1 depicts the implementation structure of practical plant with the proposed ESO-based sampled-data disturbance rejection controller (7) and (8). In practical engineering, the dominated dynamics of a system has been stabilized by feedback control, and the nonlinear character of those uncertainties contained in the system are relatively weak, which means the presence of the uncertainties will not cause much damage to the closed-loop system’s stability. Hence, such uncertainties can be regarded as part of the lumped disturbances and can be reasonably handled by sampled-data control law of the form (7). This fact will support the general availability of the proposed control method.

Implementation structure of extended state observer–based sampled-data controller.
Example and simulation results
Next, we use an example and numerical simulations to show how an ESOBC law is designed and the effectiveness of the proposed method.
A two-dimensional example
Consider a two-dimensional uncertain nonlinear system with mismatching condition of the form
which can also be written as the state-space form

with the denotation of
Clearly, system (30) can be seen as an example of system (1) and can satisfy Assumptions 1 and 2. Let

where


where
Numerical simulations
In what follows, we will use numerical simulations for system (30) to demonstrate the effectiveness of the proposed method.
The disturbance is considered as

Figures 2–4 show the response curves of the system and estimated states. One can observe from Figures 2 and 3 that the system states converge to the equilibrium quickly in the presence of both internal uncertainties and external disturbances. It is illustrated by Figure 2 that the lumped disturbance can be successfully rejected in the output channel. And from Figure 4, it is shown that the discrete-time ESO works effectively and leads to high-precision observation of the disturbance
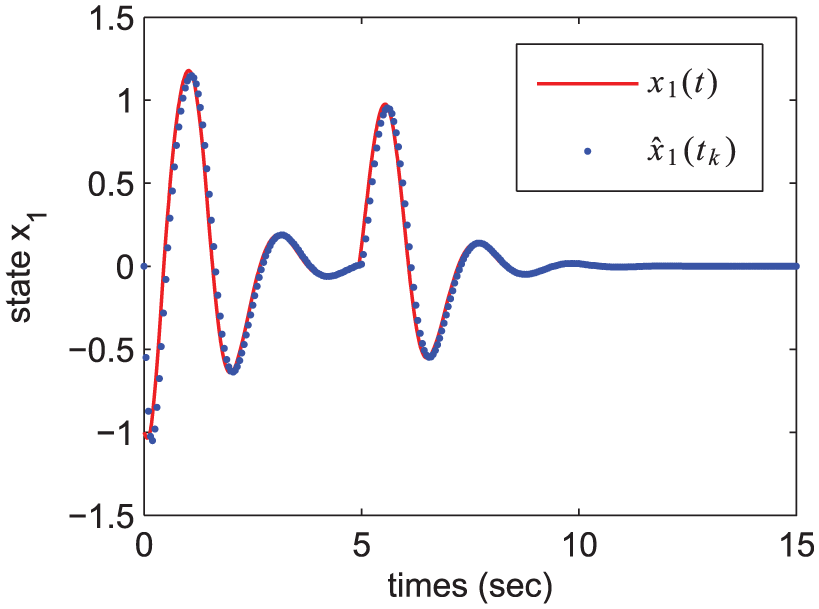
Trajectories of

Trajectories of
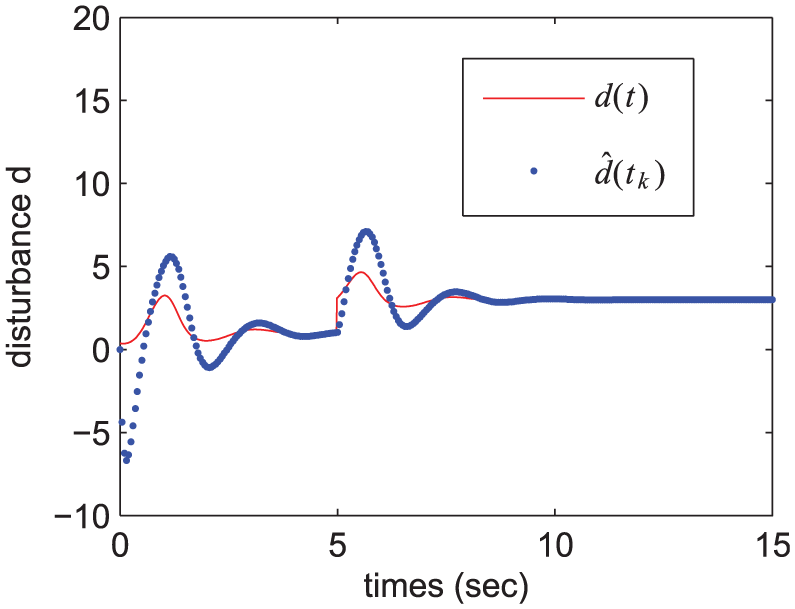
Trajectories of the disturbance

Time history of the sampled-data control input signal
Conclusion
A novel discrete-time ESO-based sampled-data active disturbance rejection output feedback control law has been proposed in this article to achieve high-precision control performances for a class of systems with mismatched uncertainties. With a delicate design procedure, the careful selection of the involved parameters ensures the global stability of the hybrid closed-loop system and disturbance rejection ability. Direct digital design strategy will lead to easier implementation. Numerical simulations have shown the effectiveness of the proposed method.
Footnotes
Academic Editor: Yongping Pan
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.