
Abstract
Developing functions for advanced driver assistance systems requires very accurate tyre models, especially for the simulation of transient conditions. In the past, parametrisation of a given tyre model based on measurement data showed shortcomings, and the globally optimal solution obtained did not appear to be plausible. In this article, an optimisation strategy is presented, which is able to find plausible and physically feasible solutions by detecting many local outcomes. The firefly algorithm mimics the natural behaviour of fireflies, which use a kind of flashing light to communicate with other members. An algorithm simulating the intensity of the light of a single firefly, diminishing with increasing distances, is implicitly able to detect local solutions on its way to the best solution in the search space. This implicit clustering feature is stressed by an additional explicit clustering step, where local solutions are stored and terminally processed to obtain a large number of possible solutions. The enhanced firefly algorithm will be first applied to the well-known Rastrigin functions and then to the tyre parametrisation problem. It is shown that the firefly algorithm is qualified to find a high number of optimisation solutions, which is required for plausible parametrisation for the given tyre model.
Keywords
Introduction
Modelling and simulation of safety-relevant driver assistance systems (DASs) and vehicle dynamics controllers (VDCs) which act in standard and limit situations lead to increasing accuracy demands in the description of dynamic reactions of tyre contact forces, particularly with respect to the delayed response to transient control input. For this purpose, first-order approaches are widely applied in this field of vehicle dynamics and handling, which originate from Von Schlippe and Dietrich, 1 were modified by Pacejka 2 and were later on refined by Rill. 3
In previous investigations, experimental validation showed that the first-order Kelvin–Voigt model, described by a spring and a damper elements, describes good suitability around fixed operation points but is limited for a wide working range.4,5 When aiming to run vehicle dynamics models within a frequency band of excitation up to 8 Hz, these models deliver remarkable deviations from measured tyre characteristics. To overcome this limitation, a non-linear Maxwell spring–damper element was introduced which is qualified to model the dynamic hardening of the elastomer materials of the tyre. 6 However, the advantage of a more realistic description of the transient behaviour leads to a more complex parametrisation process. In Hackl et al., 6 an iterative method was presented, to find a possible set of values to parametrise the Maxwell model.
But in particular, any obtained set of the identified model parameters typically depends on the chosen testing procedure. Thus, it is worth not only to consider the global optimum which satisfies a certain objective function but also to study local optima with respect to their relevance on the overall validity of the model within its area of operation.
Therefore, in continuation of previous works as cited above, in this article attention is paid to find an alternative optimisation method to parametrise the mentioned Maxwell model in a way to gather parameter information instead of getting just one possible solution. Because focus will be held on the optimisation algorithm, just one working point of the tyre, for example, constant normal force
The application of stochastic optimisation algorithms for the optimisation of technical design problems has become an established and approved approach over the last decades. Methods using simplified sequences of complex natural processes are among the most successful ones of this class. Unfortunately, their major advantages like numerical stability and high convergence rate are still followed by the high number of evaluations of the particular objective function. Despite the enormous increase in computation power, this inherent feature of stochastic methods may make them infeasible in case of problems with computationally ‘expensive’ forward problems. Therefore, a major goal of any improvement of stochastic methods is to extract as much information as possible from as few function calls as reasonable.
Prior investigations of the tyre parametrisation problem are extended using the firefly algorithm (FFA), which belongs to the so-called swarm-based metaheuristics. 7 Inherent to all these methods is the information transfer from individual to individual. In nature, fireflies are forming swarms by attracting other individuals using a kind of flash light.7,8 The luminosity of a single firefly decreases radially. Since the total light intensity of a crowd of fireflies depends on the number of insects and their individual luminosity, this integral feature can advantageously be used to form fractions of swarms, which can be expected in the vicinity of locally optimum solutions.
Cluster algorithms such as the complete linkage algorithm, 9 can be exploited to boost the formation of these clusters and, therefore, boost the search strategy to local minima. Once a reasonable number of clusters have been found, the well-known update procedure of fireflies is performed inside a single cluster only for a few predefined iteration steps. Afterwards, the best solution of each cluster is stored, and clustering is performed again. To assess the performance of the enhanced firefly algorithm (eFFA), first the Rastrigin test function is used, 10 where numerous local solutions are found in the region of interest.
Finally, the eFFA is applied on the parametrisation problem of tyre model parameter identification based on measurements. This approach promises to faster provide a set of certain model parameters and covers the usual range of dynamic driving manoeuvres. In addition, the suitability of the used testing procedure for parameter identification can be evaluated.
Modelling transient tyre dynamics
With increasing level of complexity and also automation, the simulation of safety-relevant advanced driver assistance systems (ADASs) leads to increasing accuracy demands in the description of tyre contact forces. 11 This includes the consideration of dynamic effects, such as the delayed reaction in longitudinal and lateral tyre forces to dynamic changes in slip in the tyre-road contact patch. Often, this behaviour is characterised by a first-order differential equation which describes the deflection of particles in the tyre’s tread by considering a spring and a damper elements in parallel. 3 Previous investigations showed that for some working points, these simple models show good compliance. However, when aiming to run vehicle dynamics models with an excitation frequency of up to 8 Hz, these models show deviations from measured characteristics.5,6 To overcome this limitation, a dynamic tyre force model including a Maxwell element will be presented in the following for lateral tyre dynamics.
Tyre dynamics including Maxwell element
First-order approaches are widely applied in the field of vehicle dynamics to describe the transient behaviour of a tyre contact force. One model description is shown in Figure 1 on the left side.
3
A lateral force
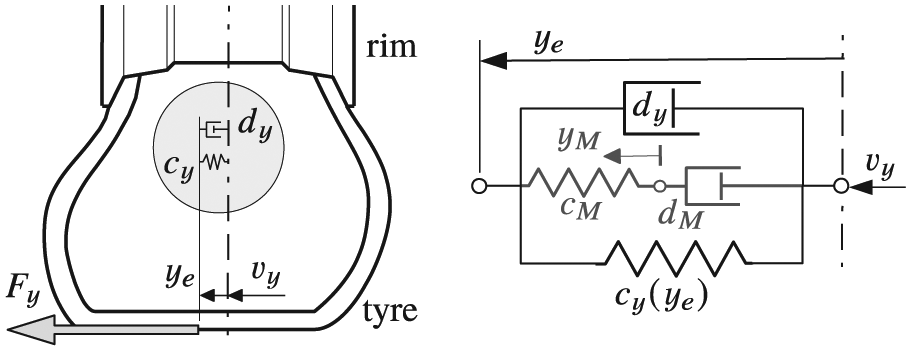
Simple tyre dynamics model for lateral direction (left) and Maxwell model for lateral tyre dynamics (right). 6
Second, placing a Maxwell element consisting of a serial spring and damper element with constants

including the steady-state lateral tyre force

A normalised lateral slip is used within the tyre model TMeasy that is defined by

where

where

where a modified transport velocity

or

where

driven by the lateral tyre deflection
Test-bench set-up and measurement procedure
The measurements have been conducted on a brake and suspension test rig, which was developed for investigations of durability and fatigue of components of quarter vehicle suspensions.
12
The test bench has a steel drum with a standardised outer diameter of 1.219 m. The drum tread has been flame sprayed with a chrome-steel alloy, resulting in a friction coefficient between drum and tyre of

Drum test rig with wheel assembly. 6
As mentioned in section ‘Introduction’, the focus of this article will be on the parametrisation algorithm. Therefore, one tyre condition with constant tyre load
Overview on measurement conditions.

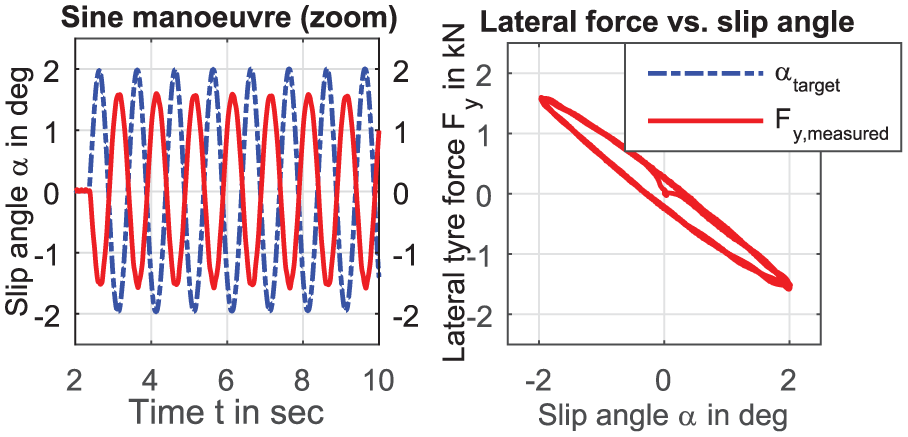
Sine steer manoeuvre target with measured lateral tyre force and a sine frequency of fs = 1 Hz.
Optimisation strategy: FFA
In this study, a d dimension, bound constrained parametrisation problem using an eFFA is solved. The mathematical formulation of the optimisation problem to be solved is stated as follows

where

and

where
In the following, the original FFA from Yang 7 and the enhancements to find local minima with a higher probability are presented.
Original FFA
The foundation of the basic FFA is based on the natural inspired behaviour of fireflies. There are nearly 2000 different firefly species of which most produce short and rhythmic flashes. The rhythms and intensity of these flashes may be different, but they share two fundamental functions to attract mating partners and potential prey.
First, the intensity of light at a certain distance r from the light source conforms to the inverse square law. This means the intensity of light I decreases as the distance r increases in terms of
All fireflies are unisex, so it means that one firefly is attracted to other fireflies irrespective of their sex.
Attractiveness and brightness are proportional to each other, so for any two flashing fireflies, the less bright one will move towards the one which is brighter. Attractiveness and brightness both decrease as their distance increases. If there is no one brighter than any other firefly, it will move randomly.
The brightness of a firefly is determined by the objective function.
This algorithm is based on two important issues: the variation of light intensity and formulation of the attractiveness. The light intensity I of firefly i, therefore

where

where
In the original FFA, the distance

In summary, the movement of a firefly i towards another more attractive (brighter) firefly j is given by

where the second term is due to the attraction of two flies, described in equation (13). The third term is a randomisation with
With this presented algorithm, quite a lot of optimisation problems can be solved with parameter selection of
Modified firefly approach
For many application problems, the boundaries to solve optimisation problem are different to mathematical functions. On one hand, computational effort is limited; therefore, especially for complex objective functions, each function call costs calculation time which automatically means costs. On the other hand, the globally best solution is not always the technically best solution. Furthermore, it is not so important to find the global/local minima quite exactly. Often, it is more important to focus calculation power on definition of minima regions with a high probability, because the final decision is taken from technical considerations anyway.
Therefore, the focus of the presented enhancement of the FFA was put on three main goals:
Minimisation of the number of function calls to reduce optimisation time;
Strong search focus on local minima to evaluate a high number of technically feasible solutions;
Increase stability of the algorithm to fulfil the first two goals on different optimisation problems, with a minimum dependency of the firefly parameters.
The basic FFA calculates the new value of the objective function after each particle movement. This may be quite effective because each particle gets a new position and also a new function value, where other particles can focus on, but the number of function calls is quite high. The maybe easiest and most effective simplification to save function calls is to resign to calculate a new objective value after each particle movement and update new values of the swarm after the movement of the whole swarm only. A disadvantage of this method is that some particles may focus on a new position with old function values. This possibility increases with a higher number of fireflies. Decreasing the number of particles below a certain threshold does not work for most optimisation problems. Therefore, a different solution had to be found to minimise the error of subsequent function calls.
After n iterations, the population is clustered hierarchically using complete linkage. 9 Some metric depending on the size of the cluster radii is used to determine suitable number of clusters. Then, FFA update is performed within clusters only. After this, the best solution of each cluster is stored and analysed after the final iteration step. This extension reveals two advantages. First, it reduces the number of unsuccessful movements considerably, and second, it tends to find a remarkable number of local solutions.
The strategy parameter of the FFA is chosen in dependency on the optimisation boundary with reference to Yang 15 and presented in the next section. A pseudo code of the eFFA is summarised in Figure 4.
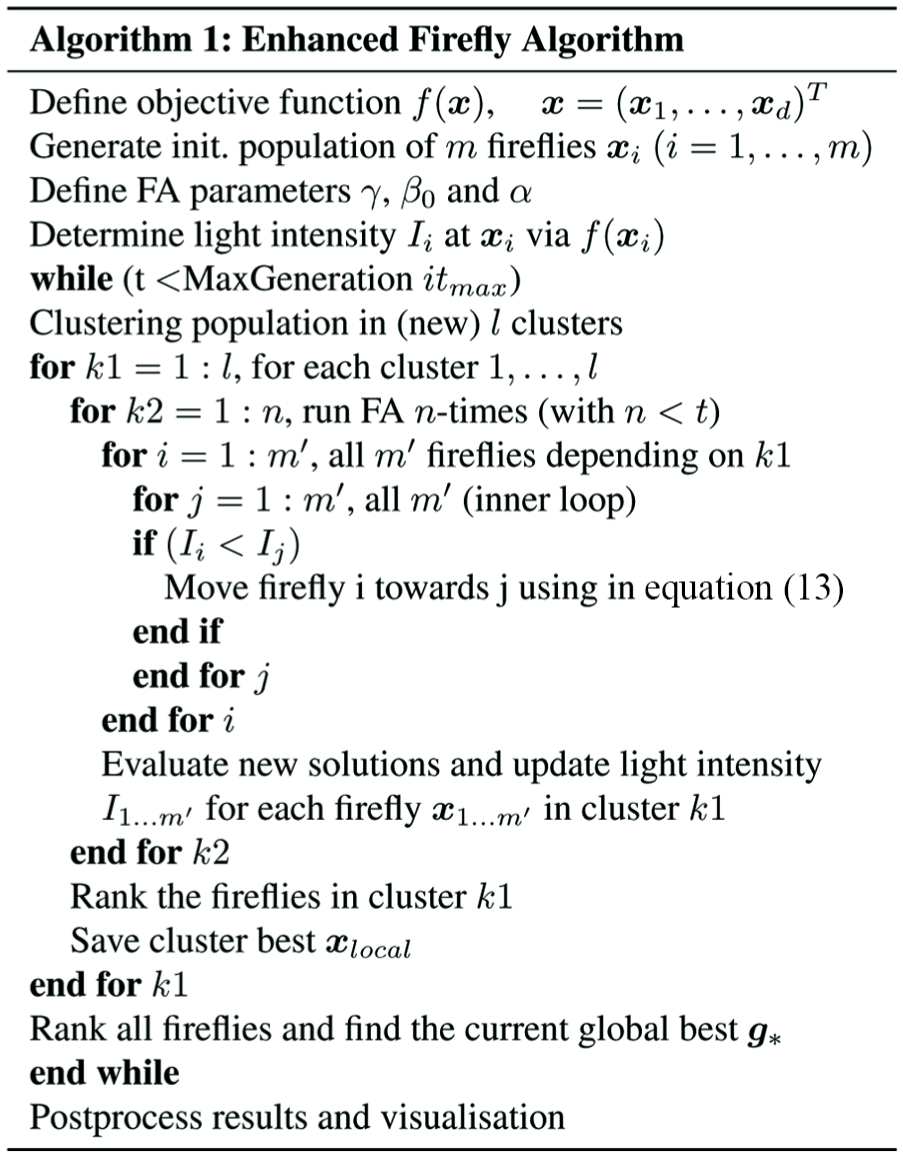
Pseudo code of the enhanced firefly algorithm.
Results
After defining the optimisation strategy, first the algorithm behaviour is tested and discussed on the well-known two-dimensional Rastrigin function and afterwards applied to the tyre parameter identification problem using test-bench measurements.
Rastrigin function
To be sure to find the global solution with a high probability, as well as to find good local solutions for different optimisation problems and additionally use the same parameter configuration for both optimisation problems, the FFA parameters are chosen with respect to the given boundary conditions.
The population consists of

Clustering process (two left sub-figures) and the particle distribution with the clustered at iteration step
On the upper left sub-figure of Figure 5, the dendrogram, which presents the cluster radius depending on the number of clusters, and the membership of the sub-clusters and particles are shown. If a lower number of clusters would be chosen, first cluster 2 and cluster 4 join; afterwards cluster 1 and cluster 5; and in the end, a single cluster with the radius
On the two right sub-figures, the swarm behaviour is presented, whereby on the upper one, the swarm particles are shown together with the contours of the Rastrigin function, and on the bottom, the particles are shown in their clustered sub-swarms. For the next four steps, each sub-swarm has its own behaviour and finds different minima.
In Figure 6, the firefly behaviour after the final step is presented. It can be seen that with the final flies characteristic, shown on the left sub-figure, the algorithm was able to find the global minimum in this case and additional three other minima.
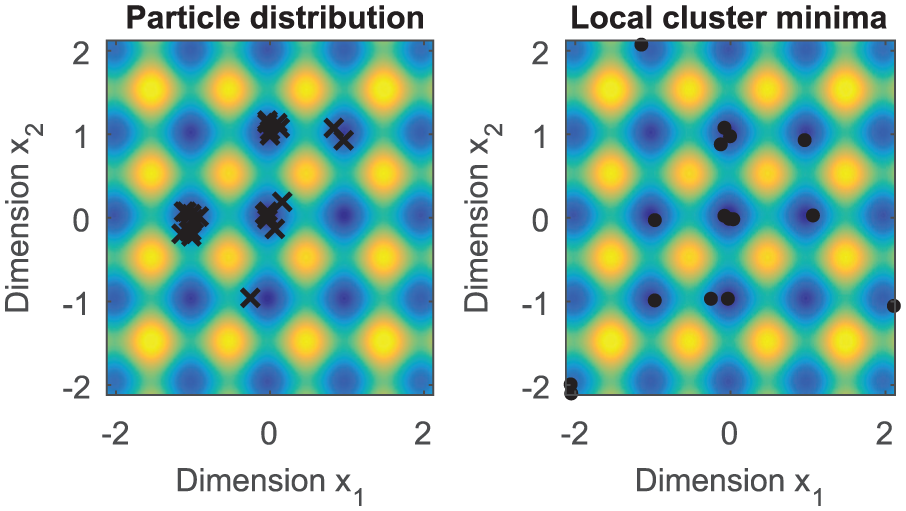
Final FFA particle distribution (left) and the found local minima during clustering (right) with
In comparison, with the help of all local minima, saved before new clustering, it was possible to find nine areas of local minima and one output which is not directly in a minimum, see
Regarding the firefly
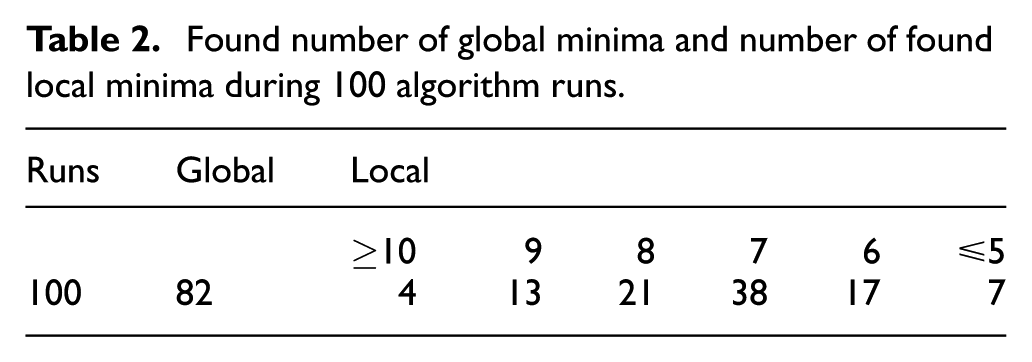
To investigate the stability of the eFFA, a test procedure with 100 test runs was done to validate the average of found global minima and the number of found local minima. The results are presented in Table 2. Exemplarily, in 82 of 100 runs, the global minimum was found, and only in 4 of 100 runs, ≥10 local minima were found additionally.
Found number of global minima and number of found local minima during 100 algorithm runs.
Parametrisation of the non-linear tyre dynamic approach
As shown before, for the Rastrigin function, the eFFA was able to find the global minimum and local minima. Now, the same strategy, with the same parameters, is used to solve the parametrisation problem of the non-linear tyre dynamic approach described in section ‘Modelling transient tyre dynamics’.
Before starting to parametrise and validate the dynamic tyre behaviour, a steady-state tyre model is required. This characteristic is parametrised with slip angle step steer inputs of

Parametrisation of the steady-state tyre model TMeasy using the utility software TFView. 6
To alleviate the optimisation problem, the non-linear characteristic of the spring
For parametrisation of the non-linear characteristics, a lateral displacement

where
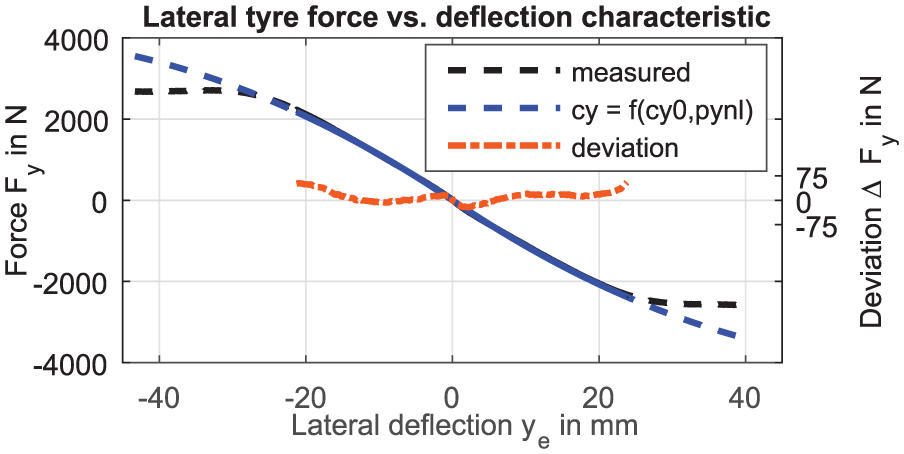
Comparison of the identified non-linear lateral spring characteristics and the measurement data.
6
Estimated parameters:
Finally, the damper

Parameter results of one eFFA run with
Roughly found parameter areas with respect to the final firefly position and the found local minima during clustering.

MA: main area; SA: sub-area.
It can be seen in Table 3 that the deviation of the Maxwell damper
Based on the results from the eFFA optimisation, area MA 1 was chosen for investigation in the present article, which means the upper boundary for
Local minima during optimisation for each frequency

It can be seen from Table 4 that with the exception of very few outliers, the deviation is less than
Final Maxwell (MW) model parameterisation found from the minima area MA 1 and compared with the state-of-the-art Kelvin–Voigt (KV) model parametrised in Hackl et al. 6

In total, the mean average of these three parameters

Results of the parametrisation of the tyre model, comparing measurements and the Kelvin–Voigt model. Above, comparison of the parametrised models with a measured sine manoeuvre with a frequency of
In the two upper sub-figures of Figure 10, the characteristics of the lateral force during a sine manoeuvre with a frequency of
The bottom sub-figure shows the NRMSD of the sine manoeuvre with different frequencies. It can be seen that the errors of the Kelvin–Voigt increase with higher frequencies, and the errors of the Maxwell model are smaller for frequencies higher than about
Conclusion
The development of ADASs requires more accurate tyre models, especially for the simulation of transient driving conditions. However, a more realistic description of the transient behaviour leads to a more complex parameterisation process. Therefore, for this purpose, an eFFA was presented, which was used to find areas of local minima with only a few function calls. It was shown that the additional cluster algorithm boosts the search strategy to find a wide range of local minima, which means spend calculation time on parameter quantity in a first step. In a second step, preferred solutions can be chosen and investigated in more detail. This leads, on one side, to a good overview of the parameter areas for the optimisation problem and, on the other side, to a good ratio of acceptable solutions versus calculation time. Summarising, the eFFA is a robust and stable method to parametrise a wide range of optimisation problems.
Additionally, it is shown that the found parametrisation results are qualified to describe the dynamic tyre behaviour over a wide frequency range. It may also support the process of detecting suitable test-bench procedures with respect to the best model parametrisation. Summarising, the Maxwell element proved to be a suitable model element to describe the dynamic hardening of the viscoelastic materials of the rotating tyre. The presented work may be seen as one step towards the entire tyre dynamics modelling problem. In further investigations, possible influences like the tyre load have to be considered, to be able to cover the full operating range of a tyre. In addition, transient effects in longitudinal direction will be investigated to complete this research topic.
Footnotes
Acknowledgements
Andreas Hackl especially thanks Georg Rill for the support regarding the tyre model TMeasy and during the parametrisation process; Liang Shao and Martin Schabauer for the technical support and discussion within the research group; and Stefan Bernsteiner, Andreas Podlipnig and Anton Sternat for support during planning and conducting the measurements on the laboratory test bench. Costs for measurements were paid by the Institute of Automotive Engineering, Graz University of Technology, thanks to a strategic internal project.
Academic Editor: Bin Yu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by TU Graz Open Access Publishing Fund.