
Abstract
Degradation failure is one of the main reasons for complex mechanical systems losing their functions. Research on multidisciplinary design optimization under uncertainties should shift from static uncertainties to time-varying uncertainties. Aiming at time-varying uncertainties in mechanical systems, we put forward a multidisciplinary reliability design optimization method using stochastic process theory. First, we investigated the characteristics of time-varying uncertainties in complex mechanical systems, and then utilized stochastic process theory to quantify time-varying uncertainties. Second, through combining the multidisciplinary simultaneous analysis and design optimization method, the model of multidisciplinary design optimization under time-varying uncertainties is established. Moreover, a mathematical problem and an engineering example are provided to illustrate the accuracy and effectiveness of the proposed method.
Keywords
Introduction
Multidisciplinary design optimization (MDO) of complex mechanical systems has shown wide application recently.1–4 Increasing attentions are being paid on MDO under uncertainties in recent years. Du and Chen5,6 proposed an uncertainty calculation method based on global and local sensitivity equation by combining uncertainty analysis method with error propagation in the process of physical measurement, and then put forward a system uncertainty analysis (SUA) method and concurrent subsystem uncertainty analysis (CSSUA) method. Gu et al. 7 derived limit expression of uncertainty propagation based on Taylor series method, and then built stochastic uncertainty analysis model. The above-mentioned researches have made tremendous contributions on MDO under aleatory and epistemic uncertainties. However, note from researches in previous studies8–13 that the degradation failure is one of the main reasons for complex mechanical systems lost their functions. There are variant time-varying uncertainties in complex mechanical systems, such as performance degradation of electronic component, strength decrease, material aging, wear, oxidation, and corrosion.14,15 Although research methods to deal with aleatory and epistemic uncertainties in MDO may largely improve the reliability of complex systems, however, these research methods cannot accurately describe the sources, essential characteristics, and propagation properties of time-varying uncertainties and cannot simply be applied to deal with time-varying uncertainties in MDO.
Currently, methods to deal with time-varying uncertainties under single-discipline analysis can be divided into two categories. (1) Probabilistic reliability methods, such as Bayesian method and Monte Carlo method. These methods are very effective when dealing with random time-varying uncertainties. However, these methods need to know the probability distributions in advance, require that time is clearly defined, and samples must be adequate. In addition, these prerequisites are often difficult to obtain in the design process. Melchers 16 indicate that when there is only one random load, the force can be expressed by the extreme value distribution, and then calculate structure failure probability using either first order reliability method (FORM) or second order reliability method (SORM) method, another case is that using series reliability method to calculate the reliability of the life cycle by only considering some of the key period in life cycle, such as storm periods. Veneziano et al. 17 assumed that time-varying uncertainties are Gauss distributions and proposed a system reliability analysis method. Breitung and Rackwitz 18 proposed a system reliability analysis method using rectangular wave renewal process to describe time-varying uncertainties, and combined Gauss process and rectangular wave renewal process to deal with time-varying uncertainties.19–21 Li and Zhang 22 assumed that the deterioration process of resistance was a Gamma process and proposed a time-variant reliability assessment. (2) Non-probabilistic reliability methods, such as interval analysis and convex sets. These methods do not take full advantage of the information in design process and the final design results are conservative. According to the upper and lower boundary of time-interval reliability, Shinozuka 23 provided calculation formulas. Andrieu-Renaud et al., 24 Cazuguel et al., 25 and Li and Mourelatos 26 established the formulas to calculate the time-varying reliability index and compared the differences and relations between time interval reliability and moment reliability. Jiang et al. 27 proposed an effective non-probabilistic model process method for time-variant uncertainty analysis.
Until now, the methods to process time-varying uncertainties under single-discipline analysis have made certain progress. However, during the whole product life cycle, forms of time-varying uncertainties are diversified and often correlated to each other. Since there are hierarchical and non-hierarchical hybrid coupled relationships between subsystems in MDO, time-varying uncertainties which exist in subsystem levels may have different influence on the final output of the system. In addition, MDO is a kind of coordination system optimization method for large systems, which leads to difficulties to quantify time-varying uncertainties.
Aiming at dealing with time-varying uncertainties in MDO, this article proposes a multidisciplinary reliability design optimization (MRDO) method under time-varying uncertainties. The remainder of this article is arranged as follows. In section “Time-varying reliability model,” we analyze the characteristics of time-varying uncertainties, and then introduce stochastic Ito process to quantify time-varying uncertainties. In section “Time-varying reliability MDO,” MDO model under time-varying uncertainties is established, and the specific operation steps are given. In section “Case studies,” a mathematical problem and an engineering example are given to illustrate the feasibility and effectiveness of the proposed method. Section “Conclusion” gives the research conclusion.
Time-varying reliability model
Reliability analysis under time-varying uncertainties
For mechanical products, time-varying uncertainties include material performance, working environment, service time, and load effect.14,15 The product performance degrades gradually over time. The degradation process of product performance is a dynamic time-varying process. 15 Time-varying reliability method is often applied to deal with time-varying uncertainties. Time-varying reliability means that the failure rate pf (t0–t1) of limit state function is less than the given failure rate during time interval t0–t1. In other words, the reliability R of limit state function at any time is greater than the allowable reliability [R], which is shown in Figure 1.

Time-varying reliability diagram.
Currently, the methods considering time-varying uncertainties assume that strength and stress of mechanical parts follow certain probability distributions, respectively,28–31 which cannot be used to evaluate dynamic evolution process of time-varying uncertainties. According to this, we attempt to propose a time-varying reliability prediction model based on stochastic differential equation theory which can calculate the reliability index at any time.
Stochastic differential equation
Compared to traditional probability methods, Ito differential equation is better to deal with uncertainties in mechanical systems. The structure of Ito differential equation is simple, theoretical concept is clear, so it is very easy to combine Ito differential equation with MDO to solve time-varying uncertainties. Assume Ω = {ω} is the sample space of stochastic experiment, and T is a set of parameters (time). For each t∈T, there is a random variable X(t, ω). A set of variables X(t, ω) is a stochastic process. The definition domain of ω is the entire sample space, and the definition domain of t is the entire timeline [0, ∞] or a time period [0, T] 32

Assume that there are m time-varying factors, then

Set (Ω, F, P) is a probability space; F is the σ-algebra of Ω, P is the probability measure of Ω, and the random variable X(t, ω) should satisfy the following Ito equation

where u(t) is the drift rate which reflects the influence of deterministic factors, and v(t) is the fluctuation rate which reflects the influence of time-varying uncertainties.
The drift rate can be expressed as follows

where Xi is the observation value at time point i (i = 1, 2, …, n).
The fluctuation rate can be expressed as

where Xj is the observation at time point j (j = 1, 2, …, n). The draft rate and the fluctuation rate are affected by the number of observation points. The more the observation points, the more the precision of the result. For different problems, the number of observation points can be set according to precision needed. Although Ito differential equation has many advantages, it is not applicable for those cases when load mutation exists in the engineering structure.
Time-varying reliability model
If the random variable X satisfies the following equation

equation (4) also can be expressed as

Assume that Y(t) = ln X(t, ω), which leads to

where s is the time variable

According to equations (7) and (8)


We can obtain

The relationship between the expected logarithm and logarithmic expectation can be obtained by

By substituting equation (10) in equations (8) and (9), we can obtain

where ln X(t) is a normal distribution function, and the corresponding mean value and variation coefficient are

Assume that the limit state function is

where G(t, ω) > 0 means the structure is safe, and G(t, ω) < 0 indicates failure of the structure. Therefore, the reliability probability is expressed as

Let


Then, the probability density function of Z is

Let

The reliability index can be obtained by R(t) = Φ(−ZR(t)). Substitute equation (15) in equations (13) and (14)

where

and

Once the reliability index ZR(t) is given, take initial S(0) and δ(0) as constrains to quantify time-varying uncertainties, and the time-varying reliability optimization model can be constructed.
Time-varying reliability MDO
Multidisciplinary simultaneous analysis and design
Generally, a multidisciplinary optimization problem consists of two subsystems. The multidisciplinary simultaneous analysis and design (SAND) method 33 is introduced to construct the optimization framework, which is shown in Figure 2. Since time-varying uncertainties analysis is complicated and time-consuming, it is better to combine it with simple and easy MDO strategy. Compared to the other MDO strategies, SAND expression is simpler and easier to understand. SAND strategy can substitute solver for analyzer, which can reduce the high time-consuming analysis process.

SAND optimization framework.
In Figure 2, Xs and Ps are the shared design variable vector and shared design parameter vector, respectively. Xi is the design variable vector of discipline i, Pi is the design parameter vector of discipline i, yij is the coupled state variable vector which is the output from i and input to discipline j, and

Ito-RBTV-MDO model
The time-varying reliability optimization model of MDO is shown as follows
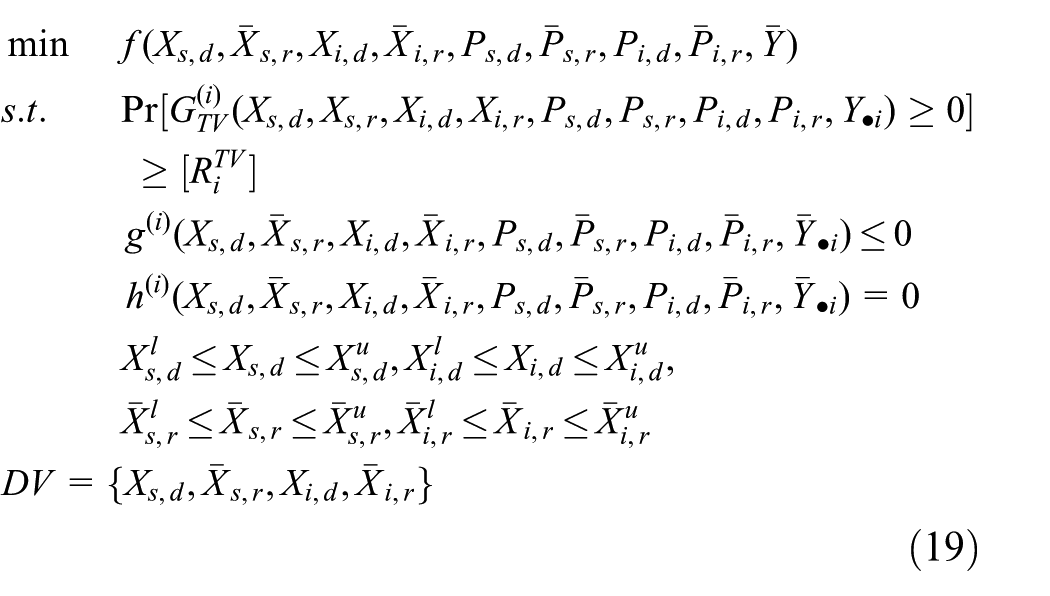
where Xs,d and Ps,d are the shared deterministic design variable vector and shared deterministic design parameter vector, respectively. Xi,d and Pi,d are the shared deterministic design variable vector and shared deterministic design parameter vector of discipline i, respectively. Xs,r and Ps,r are the shared random variable vector and shared random parameter vector, respectively. Xi,r and Pi,r are the shared random variable vector and shared random parameter vector of discipline i, respectively.
The two subsystems Ito-reliability-based time varying (RBTV)-MDO model is shown in Figure 3.

Ito-RBTV-MDO optimization framework.
In Figure 3,
Step 1. Deterministic MDO is implemented using the SAND method.
Step 2. Time-varying uncertainties are analyzed and quantified (the data of time-varying uncertainties are obtained by simulate sampling method in this article).
Step 3. Apply Ito equation theory to construct reliability optimization models under time-varying uncertainties.
Step 4. Convert time-varying reliability optimization models to constraints in MDO and implement a new deterministic MDO.
The corresponding flow chart is shown in Figure 4.

Time-varying reliability optimization flow chart.
Case studies
In this section, both a mathematical example and a case study of an engineering system are introduced to illustrate feasibility and validity of the proposed method.
A mathematical example
This is a very classic MDO problem which includes two disciplines. Each discipline has a coupled state variable; nonlinear coupled relationship exists between two disciplines. 34 In order to reflect actual situation more clearly, we have modified this mathematical example. Two time-varying uncertainties p1 and p2 are added in optimization model, which to research how system limit state function G(t, ω) are effected.
The optimization model is expressed as follows

where

The corresponding SAND model is shown in Figure 5.

SAND model of mathematical example.
The corresponding limit state function is given by
The design parameters p1 and p2 are time-varying uncertainties. The corresponding sampling data are obtained by MATLAB simulation during 10 years, which is shown in Figure 6.

Time-varying data of two design parameters.
Using equations (3) and (4), to calculate the drift rates and fluctuation rates

State function is expressed as

The design requirement of reliability index is 0.998 after 10 years, then

According to equation (17), we have

Through updating state equation under time-varying uncertainties and implementing the optimization process mentioned in section “Ito-RBTV-MDO model,” the corresponding optimization results are shown in Table 1, where time invariant (TIV) is the optimization result without considering time-varying uncertainties; RBTV is the reliability optimization result under time-varying uncertainties.
Optimization results.

The reliability indexes of state function in each year are shown in Figure 7.

Comparison of reliability indexes.
From the optimization results of these two methods, we can note that the value of objection function of RBTV method increases by 10.1% than TIVs. However, without considering the time-varying uncertainties, the reliability index of TIV method is 0.8262 after 10 years, which is obviously lower than the reliability index of design requirement 0.998. The reliability index of RBTV method is 0.9999 after 10 years by considering the time-varying uncertainties, which still satisfied the design requirement of reliability.
An engineering example
This is a speed-reducer optimization problem, 35 and the structure is shown in Figure 8. The objective function is to minimize the volume of the structure. The main constrains are the bending stress and contact stress of the gear tooth, the torsion deformation, and stress requirements of the shafts.

Structure diagram of speed reducer.
The corresponding optimization model is as follows
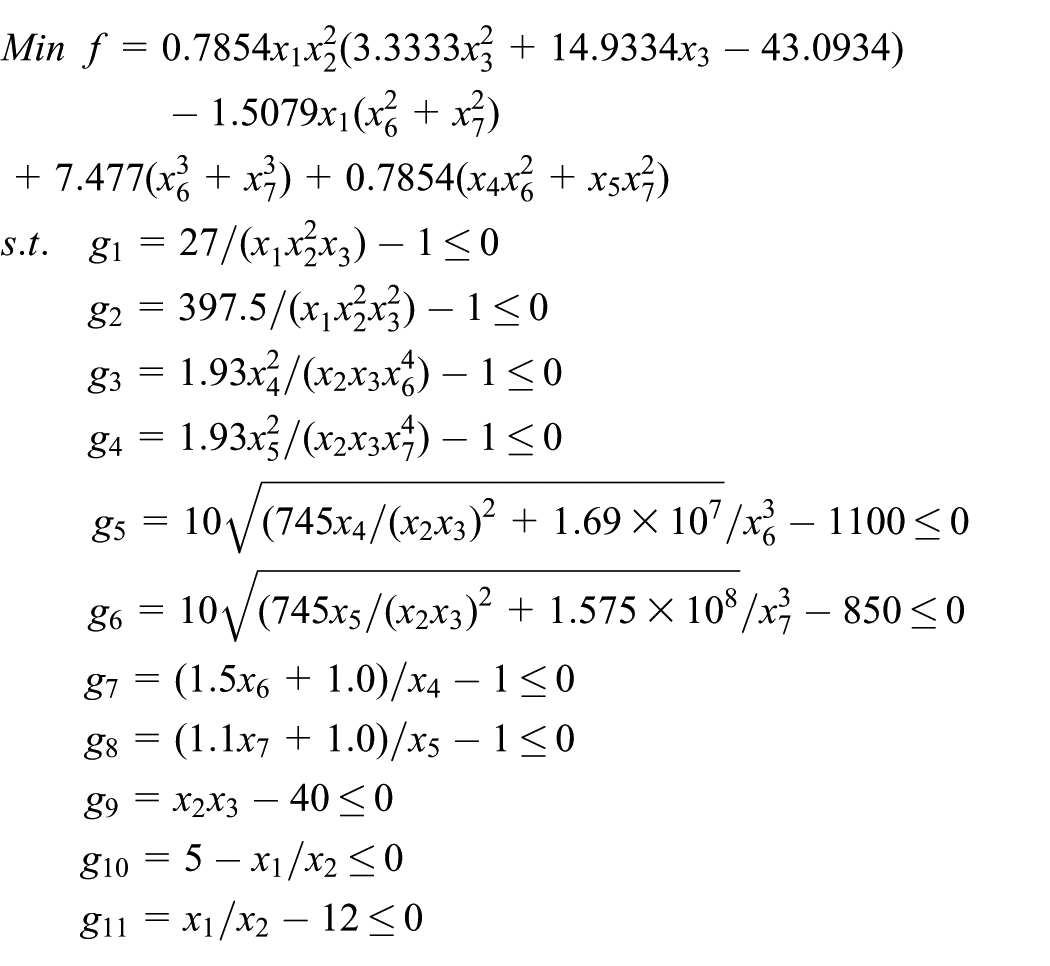
where x1 is the tooth width; x2 is the gear module; x3 is the number of teeth of the pinion; x4 is the distance between the bearings 1; x5 is the distance between bearings 2; x6 is the diameter of the shaft 1; x7 is the diameter of the shaft 2; g1 and g2 are the constraints of bending stress and contact stress, respectively; g3–g8 are the constraints of the shaft deformation, stress, and so on; and g9–g11 are the geometric constraints. The bounds of each design variable are shown in Table 2.
Lower and upper bounds of design variables (mm).

The limit state functions of g5 and g6 are as follows

Assuming that design variables x6 and x7 are time-varying uncertainties. The corresponding data of time-varying uncertainties are obtained by simulation methods, which are shown in Figure 9.

Time-varying data.
Using equations (3) and (4) to calculate the drift rate and fluctuation rate

Let us consider

Suppose 1 year later, the requirement of reliability index is 0.98, then

According to equation (17)

The corresponding optimization results are shown in Table 3. TIV is the optimization result without considering time-varying uncertainties; RBTV is the reliability optimization result under time-varying uncertainties.
Optimization results.

The reliability indexes of limit state functions in each month are shown in Figure 10.

Reliability indexes of g5 and g6.
Without considering the time-varying uncertainties, the reliability indexes of g5 and g6 are 0.4991 and 0.5010, respectively, at initial time. Considering the time-varying uncertainties, the reliability indexes of g5 and g6 are 0.9999 and 0.99140, respectively, at initial time. 1 year later, the reliability indexes of g5 and g6 are 0.9987 and 0.9813, which still meet the reliability requirements. Although the value of objective function under time-varying uncertainties is 5.23% higher than the results without considering time-varying uncertainties, the reliability performance under time-varying uncertainties has been greatly improved. From this engineering example, it is worth noting that time-varying uncertainties have shown a great influence on the reliability performance of the system. In practical engineering optimization, the impact of time-varying uncertainties should be properly considered.
Conclusion
The time-varying uncertainties of complex mechanical system are investigated using stochastic process and corresponding time-varying reliability optimization model are proposed.
Using the SAND method, the model of MRDO under time-varying uncertainties is established. Then, a mathematical example and an engineering example are introduced to verify the accuracy and effectiveness of the proposed method.
The proposed method is suitable for estimating gradual time-varying uncertainties, such as fatigue strength and material wear, which is not suitable for mutational time-varying uncertainties, such as mutational load and stress. As for mutational time-varying uncertainties, it may be calculated by combining extreme value theory with series reliability analysis method.
Due to the complexity of MDO, diverse manifestations, and correlation of time-varying uncertainties, it is very difficult to quantify the characteristics of time-varying uncertainties in some cases, which will be further investigated.
Footnotes
Academic Editor: Yongming Liu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the National Natural Science Foundation of China under the contract no. 51475082.