
Abstract
A super-twisting sliding mode controller is proposed for nonlinear system with external disturbance in order to reduce chattering phenomenon. A criterion is obtained that guarantees the convergence of system states in finite time by Lyapunov stability method. Finally, the results of simulation for carbon fiber multilayer diagonal loom are presented to confirm the effectiveness of the super-twisting sliding mode controller design in agreement.
Keywords
Introduction
Many control theory and application studies have been extensively done for linear/nonlinear dynamical systems in last two decades. The development of high performance controllers are designed such as sliding mode control,1,2 fuzzy control,3–5 H∞ control,6,7 neural network control, 8 event-triggered control, 9 and adaptive robust control. 10 Sliding mode control is a good robust control method. The price realization of robustness and not sensitive to these disturbances is called chattering phenomenon in the controlled system. In order to avoid the risk of chattering phenomenon, the traditional method is as follows: (1) by saturation or sigmoid ones to replace the discontinuous sign function. This method is a continuous control, but lost its vicinity interference robustness. (2) Higher order sliding mode (HOSM) method has been recently investigated and developed.11–13 A major advantage of keeping the traditional sliding mode control, the chattering effect of reducing the vibrations, and higher order accuracy is set. However, the main challenge is to use high-end slide sliding controller variable higher order time derivative. Since the method under HOSM is a special case, the second-order slide model algorithm is characterized by finite time.
The other second-order sliding mode controller is also necessary to slide the time derivative of the variable. But super twisted algorithms and gain commuted controllers need only slide variable measurements. 14 Davila et al. 15 propose a novel super-twisting sliding mode control based on dynamically adapted gain for uncertain nonlinear system. A family of quadratic-like strong Lyapunov functions is proposed based on the super-twisting sliding mode control methods in Shtessel et al. 14 The results of simulation show that the trajectories of nonlinear system converge to the origin in finite time. In this article, a result is extended for Davila et al., 15 which only consider the unmodeled dynamics of nonlinear system. The main disadvantage of above the article is it does not consider that the system is restricted by external disturbance of nonlinear system and the chattering phenomenon.
Depending on the unique and brilliant characteristics for area of aviation, the carbon fiber composite materials are widely used in aircraft industry. The diagonal weaving technique is a new carbon fiber composite material skeleton weaving technology which is developed based on the multilayer warp manufacture techniques. This research carries out on the basis of a self-developed carbon fiber diagonal weaving equipment for which we have fully independent intellectual property rights.
The purpose of this article is to design a novel super-twisting sliding mode controller based on the well-known linear matrix inequality (LMI) for carbon fiber multilayer diagonal loom. A stabilization criterion for the proposed super-twisting control method is derived. The proof is confirmed based on Lyapunov function theory.
This article is structured as follows: issues and assumptions are specified in section “Problem formulation.” In section “Design of super-twisting sliding mode controller,” the super-twisting sliding mode controller is designed. In section “Application for the control of carbon fiber multilayer diagonal loom,” the simulation and the advantages and efficiency of the proposed method are demonstrated. A summary of the article is provided in section “Conclusion.”
Problem formulation
The following second-order uncertain dynamic system form is considered as

where
The purpose of non-singular terminal sliding mode controller design is to design a control law
In this article, we design the terminal sliding mode surface as follows


where
Taking the time derivative of terminal sliding mode surface (equations (2) and (3)), one can obtain


In the first place, we need to introduce some assumptions in order to design the sliding mode controller for system (1).
Assumption 1
The right-hand side of terminal sliding mode surface (equations (2) and (3)) is discontinuous and we suppose that the differential equation solutions of (2) and (3) are in the sense of Filippov.
Assumption 2
The nonlinear functions

where the uncertain function
In order to obtain the equivalent control, by substituting equation (6) into equation (5), the equation is changed as

We can denote
In order to design terminal sliding mode controller–based super-twisting control, we design a preliminary feedback as follows

where v is an auxiliary function which needs to be designed later.
Substituting equation (8) into equation (7), one can obtain as the following equation

Assumption 3
Suppose function

where
In order to reduce the chattering effect, we can design the auxiliary function v based on super-twisting method in Shtessel et al. 14 as


By substituting equation (11) into equation (9), we can obtain the following equation

where
The problem is to design a super-twisting control based on additive perturbations with the unknown boundaries. In this section, a terminal sliding mode control law based on super-twisting control is constructed to stabilize uncertain system (1) which satisfies Assumptions 1–3.
Design of super-twisting sliding mode controller
A lemma is given in order to design system controller and stability analysis.
Lemma 1
The following system is considered:

where parameter number
Then, we call that system is locally finite time stable. Based on the initial system state

Especially, when
Although Davila et al. 15 design the sliding mode controller which can stabilize the equilibrium point of system (1) in finite time, the chattering phenomenon can still be serious. In order to reduce the chattering phenomenon which caused by sign function, we design a terminal sliding mode controller-based super-twisting following theory.
Theorem 1
System (1) is uncertain system and contains unmodeled dynamics and external disturbances. The terminal sliding mode control surface is designed as equations (2) and (3) and the terminal sliding mode control law (8), where v is defined as in equations (11) and (12) and can ensure the system is stable with respect to s in finite time based on Assumptions 1–3 and the parameters

and
Proof
We can construct a Lyapunov function as follows

We define variable
If
Taking the time derivative of Lyapunov function (17), the following equation can be obtained

Through algebra method, we substitute equations (12) and (13) into equation (18) and obtain the following equation

Using Cauchy–Schwarz inequality and Assumptions 3, the bounding arguments are obtained as follows

Then, the inequality (19) can be obtained as follows

where
Using

Using Rayleigh’s inequality to V, one obtains

Because

Using equalities (21)–(23), one obtain

where
From the above proof, we know that the terminal sliding mode surface
Remark 1
If
Remark 2
Using Lemma 1, the settling time T can obtain the following inequality as

Remark 3
Based on the terminal sliding mode surface equations (2) and (3) and the control law (8), (11), and (12), we can find that the chattering phenomenon is reduced. Because sign() function is introduced as an integral term.
Application for the control of carbon fiber multilayer diagonal loom
This equipment consists of the multiple beam constant tension let-off mechanism, electronic jacquard and pneumatic drive healed frame cooperated opening mechanism, two-way double rapier weft insertion mechanism, crank rocker and connecting rod slider combination of beating-up mechanism, and variable thickness fabric mechanism. Its control system adopts distributed multiple beam warp tension control. This equipment resolves many problems in warp tension control field, such as nonlinear, time-varying, and the disturbance of multiple variables. In addition, it also solves the technical puzzle of the synchronous control for the strongly coupled between the tension and speed. In a word, it realizes soft weaving manufacture and also improves the working efficiency.
The carbon fiber has many characteristics, for example, it possesses light weight and high strength, big severity, and small extension, and it is not able to bear the large radial friction. Therefore, common loom is not competent for the carbon fiber weaving, especially the more complicated angle interlock fabric reinforced, as shown in Figure 1. The carbon fiber angle weaving equipment (AWE) is a multilayer weaving machine designed according to the special performance requirements of fabric structure.
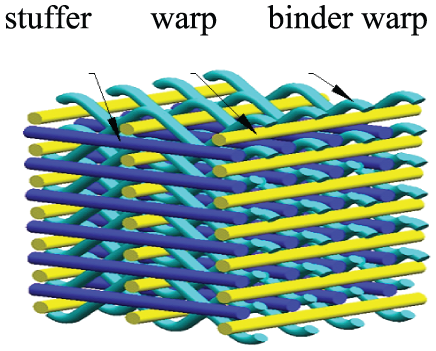
Angle interlock fabric reinforced structure diagram.
The carbon fiber AWE is a novel design and its weaving process and mechanism design are more complicated than conventional weaving machines. The technical difficulties related to once-forming of the layer-by-layer wefting insertion for the multilayer fabric are solved. The carbon fiber AWE is composed of five kernel components including opening, loom off, wefting insertion, beating-up, and take-up. According to the material properties of carbon fiber and the organizational structure of the multilayer angle interlock fabric, some design principles are necessary to obey, such as selecting multi-motor as power source, improving mechanical structure, adopting steel and reducing casting, and using more standard parts. The system principle is shown in Figure 2 where the warp unwinds from the driving shaft and then through the device of tension compensation and collecting yarn and then through the hole of heddle. The shed is formed through the up and down movement of the heddle. In the meanwhile, the weft yarn clamped by wefting insertion device is performed on wefting insertion to create the fabric at the woven mouth, as a result, the yardage roll is made.

Carbon fiber multilayer diagonal loom schematic diagram.
Based on the operating principle of the loom, the warp tension control for the let-off mechanism is the system kernel. The dynamic equations of carbon fiber multilayer diagonal loom are described as follows

where
Thus

where
From equation (27), following equations can be obtained

where

where
The objective is to design a super-twisting sliding mode controller such that carbon fiber multilayer diagonal loom tension error tracks zero. Figures 3 and 4 show the proposed super-twisting sliding mode controller which is given in equations (8), (11), and (12), which obviously ensures that the error states of system (29) can reach to zero in finite time stabilization from Figure 3. The control input is shown in Figure 4 which shows that the proposed super-twisting sliding mode controller has the advantages of robustness and finite time convergent with external disturbance. But the phenomenon of chattering is not reduced in Figure 4. These simulation results show the advantages of the robustness and the finite time convergent for the proposed super-twisting sliding mode controller.

The system tracking state response under designed control law with disturbance.
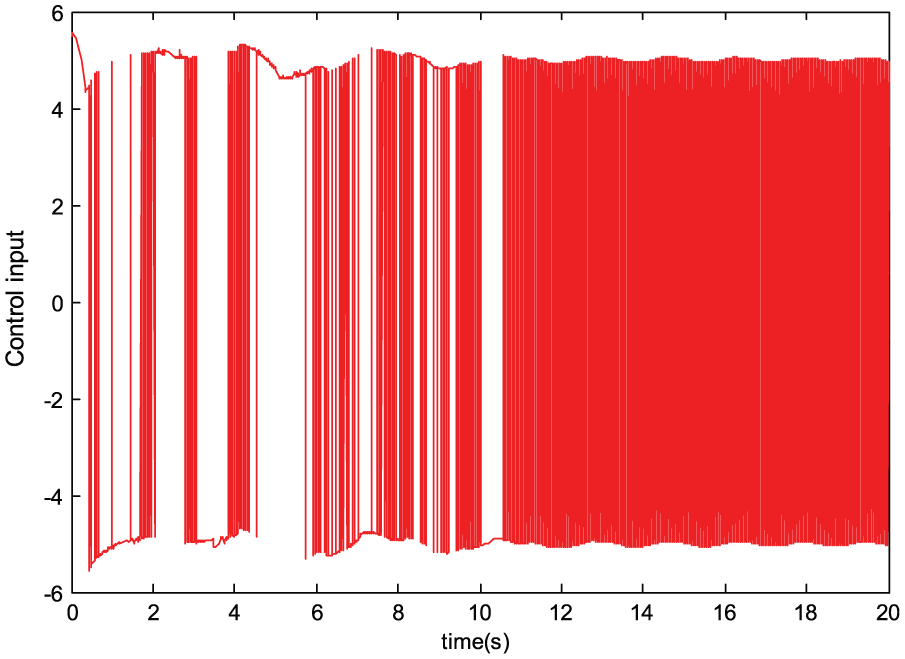
Control input of the AWE system.
Conclusion
This work presents a super-twisting sliding mode controller for nonlinear systems with external disturbance. The proposed method ensures robustness by Lyapunov stability theory and linear matrix inequality technique. The efficacy of the proposed super-twisting sliding mode control method is confirmed on carbon fiber multilayer diagonal loom. However, the proposed method in this article needs to obtain the information on the boundaries of the disturbance.
Recently, some applications about position machines have been provided in Romero-Cadaval et al., 16 Gao et al., 17 and Wang et al. 18 Our future work will use the proposed results and methods to consider the analysis and synthesis of the control problems for carbon fiber multilayer diagonal loom raised from the previous works.16–18
Footnotes
Academic Editor: Nasim Ullah
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Science and Technology Support Program of China (2011BAF08B02) and Higher School Science and Technology Development Fund Project in Tianjin (20130709).