
Abstract
In order to reduce the design variable fluctuations in the multi-objective optimization of the pantograph geometric parameters of electric multiple units, a multi-objective reliability design optimization method was proposed based on the dual response surface method in this article. The corresponding model of the pantograph was built by integrating the dual response surface method, the reliability indexes, and fuzzy preference method. Considering different working conditions and reliability index, the reliability optimal design target was realized by optimizing the established model. A case was studied to verify the feasibility and effectiveness of the proposed method.
Keywords
Introduction
The pantograph is one of the important parts of electric multiple unit (EMU). Its good dynamic performance can reduce the impact of pantograph catenary and the contact force effectively. Once the off-line rate was reduced, EMU can operate with few failures. 1 To obtain a better performance of the EMU pantograph, many investigations on the pantograph system structure, 2 dynamic model, 3 contact network, 4 gas dynamic noise, 5 and mechanical properties6,7 have been carried out to solve system optimization problems. However, most of these studies ignore design variables’ fluctuations generally, which may lead to the unreasonable design solutions which cannot satisfy the requirements of actual situations.8–11
Reliability design optimization is one of the modern design methods.12–15 It can reduce the sensitivity of objective function to design variables. At present, the studies of reliability design optimization mainly focus on the multidisciplinary design optimization, 12 collaborative optimization, 13 interaction balance optimization, 14 interaction prediction optimization, 15 and providing the thought for the multi-objective robust reliability optimization. However, such studies just considered the uncertainty analysis of the design, and the variable fluctuations of the design goals have not been investigated. In optimization of the pantograph geometric parameters, the reliability design method was introduced to objective function and constraints, which can reduce the system interference and improve the electrical performance of bow reliability.
The robust reliability optimal design was developed by Ben Haim since 1990s. Later, many corresponding studies have been proposed.16–19 The most robust reliability design optimization model was established based on reliability analysis method,16,17 stochastic model, 18 the reliability index, 19 and so on. However, the robust reliability optimization method research in the multi-parameter, multi-objective optimization problem is rarely researched in these studies, and the practical application in the vehicle track is rarely too. The Box–Behnken design (BBD) experimental design is a kind of experimental design method that can consider many design variables and their interactions at the same time. In this article, the BBD experimental design is combined with the dual response surface method, and then the fluctuation variance can be reduced effectively and the sensitivity of the design parameters can be reduced too. Therefore, the multi-objective robustness and reliability of the pantograph can be realized.
In this study, an EMU pantograph is chosen as the engineering object. A reliability design optimization method was proposed, which was based on the dual response surface method. Then, a multi-objective reliability design optimization model of the pantograph geometric parameters was established. Different levels of design variables’ values were obtained using the BBD experimental design. The target reliability indexes were calculated using the dual response surface method. Then the comprehensive design objective can be obtained by adopting fuzzy preference method. The optimization problem was solved in the ISIGHT 5.6 platform. Finally, the reliability optimization solutions were obtained, which improved the performance of the EMU pantograph.
Multi-objective reliability design optimization model
Response surface methodology is based on the experimental design, which is one of the statistical processing techniques. It is used to model and analyze multi-variable issues.
20
The dual response surface methodology is based on the results of the physical experiment and simulation test. The main response surface model and the sub-response surface model can be fitted by the mean


where
In this study, the multi-objective reliability design optimization is based on the dual response surface model of the mean value and variance. Then, the geometric parameters of reliability can be measured with the application of reliability index, which improves the reliability of performance.
In reliability analysis, both the structural resistance R and the comprehensive effect S were subjected to the normal distribution. Thus, the structural function

where
In the design period, the reliability index of the structure
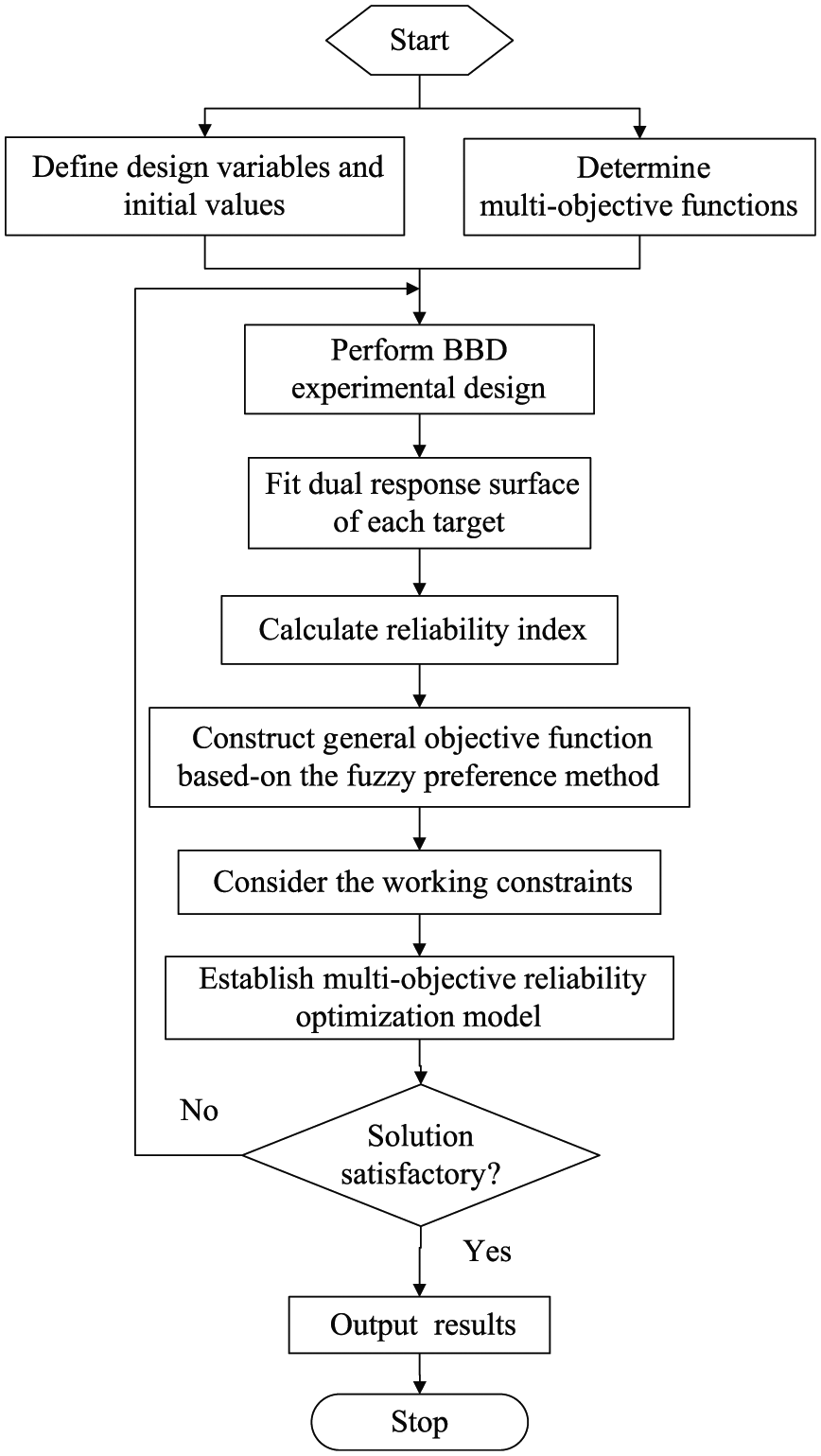
The process of multi-objective reliability design optimization.
As shown in Figure 1, a general multi-objective reliability design optimization process was illustrated in detail. The dual response surface method and fuzzy preference method were applied to construct the total objective function, and the working constraints’ robustness was combined. Then the corresponding optimization model was established as

where
Multi-objective reliability design optimization of pantograph geometric parameters
There are many different EMU pantograph models in China, such as DSA250 series, SSS400 series, TSG19 series, and CX-PG series. 22 In this study, the multi-object reliability optimization problem of SSS400 series pantograph of EMU was discussed.
Geometric parameter model of pantograph mechanism
The arch frame part of the pantograph is a four-bar mechanism. Its transmission mechanism is connected with a driving rod to realize the bow down of the pantograph. Its model of the pantograph frame mechanism is as shown in Figure 2.
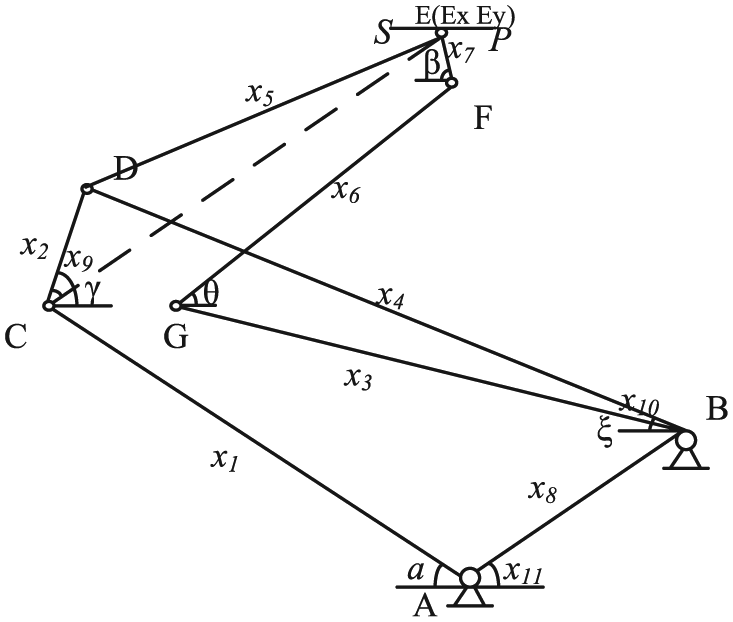
Geometric parameters’ model of the EMU pantograph mechanism.
The pantograph is mainly composed of bow head, swing arm, upper arm rod, lower arm rod, support rod, balance rod, and other parts.
23
In Figure 2, section SP is the bow head swing lever and section AC is the active pole. The design of the pantograph contains 11 design parameters, that is,



where
The descriptions of the factors.

The design variables and level values
To test design, the reliability design optimization based on the dual response surface method was applied in the pantograph by setting design variables. There are 11 design variables in the optimization problem. Thus, the BBD method is chosen which is suitable for three factors or more.
The BBD experimental design
The BBD is an experimental design method which evaluates the nonlinear relationship between the indicators and factors. This method utilizes an approximate rotational symmetry. It is also composed of a plurality orthogonal cube and a center point. 24 The BBD experimental design of the three levels is shown in Figure 3.

Box–Behnken design.
The advantage of this method is that it can evaluate the main factors and the factor interactions. Moreover, it can arrange the experiment combinations of factors and avoid the emergence of extreme point.
The design variables and level values
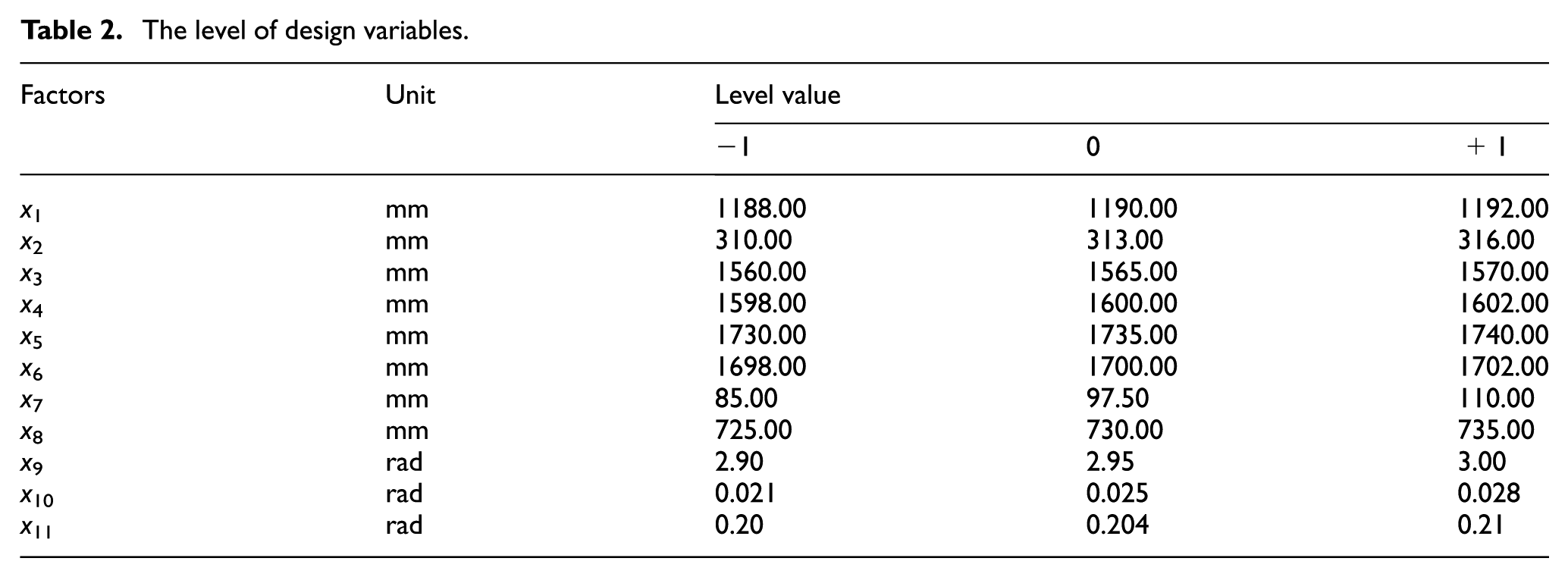
All the 11 design factors of the EMU pantograph were applied in BBD experimental design using Design-Expert software. The test number was 204 times; the setting levels of the design variables are given in Table 2.
The level of design variables.
The objective function
During the operation process of EMU, to ensure normal work, the geometric parameters of the pantograph are required to satisfy certain requirements. First, to ensure the pantograph to close bow down normally, the trajectory of the bow head point E within working height range and the maximum deviation of the transverse direction (x-direction) were not too large. Second, to prevent the slide force of the bow head from subjecting to uneven stress, the bow head balancing rod EF tries to keep the translational motion within the working height range.
A general calculating formula for the degree of freedom of a planar mechanism is

where m is the number of active members, pi is the number of low pairs, and ph is the number of high pairs.
From Figure 2, it can be seen that the pantograph has five active members, seven low pairs, and zero high pairs; the degree of freedom of the pantographs is
When the arm AC rotates around fixed hinge support A, the angle
1. Establishing the dual response surface model
The mean and the variance of the three goals were fitted through the BBD, respectively. The target average response surface model and the target variance response surface model can be obtained as shown in Figure 4.

The 3D response surface model of each target: (a) the average response surface model of
The mean and variance response surface models were fitted the relationship of target and variables by testing the deterministic coefficient R2.
The
There existed a large difference between the value of the objective means and the value of objective variance function. So it can be controlled within the range of [0, 1] through the linear transformation method.25,26 Such transformation was expressed as

where
Based on the above-mentioned equations, the target reliability index can be calculated. The corresponding expressions are also given as follows



where
2. Determining the comprehensive weight coefficient
It is difficult to determine the weight of each objective function involving the mean and variance in engineering optimization problems. In this article, the method based on fuzzy preference 27 can be used in the multi-objective reliability optimization problems of the EMU pantograph.
For the three target reliability indexes

where

The weight coefficient was calculated based on the preference matrix



3. Constructing the multi-objective reliability design optimization function
The multi-objective reliability design optimization function was constructed weighting using weight coefficient as

The constraint conditions
To satisfy the reliability constraints, the constraint conditions can be set as 28

where
To get the requirements of the EMU pantograph normal operations, the constraint conditions of the normal operations are listed as follows:
In order to ensure the pantograph to accept the bow normally, the pantograph has to meet the conditions at

The pantograph head bow lateral offset should keep less than 30 mm according to the actual requirements, and its conditions are as follows

w?>The working height of the pantograph should satisfy the requirements of the falling bow. So the point E ordinate should be within the scope of 300–2250 mm, and its conditions are as follows

To meet the requirements of the pantograph performance reliability, the reliability index should be satisfied as

To make pantograph mechanism move normally, and satisfy the pantograph height requirements, the design variable boundary conditions should be met as follows

Optimization calculations and the results’ analysis
The design solution was obtained by solving the optimization problem using the ISIGHT 5.6 software. The iteration number is 500 times. The optimization history is also shown in Figure 5.

The reliability optimization history.
The reliability design optimization solutions, the initial value, and the conventional optimization solutions 29 are given in Table 3.
The comparison between conventional design solutions and reliability design optimization solutions.

The EMU pantograph’s initial value, the conventional optimization value, and the reliability optimization solutions were similar as shown in Table 3. But the reliability was improved after the reliability optimization. According to different solutions, the diagram of rising bow angle
The relationships of the rising bow angle
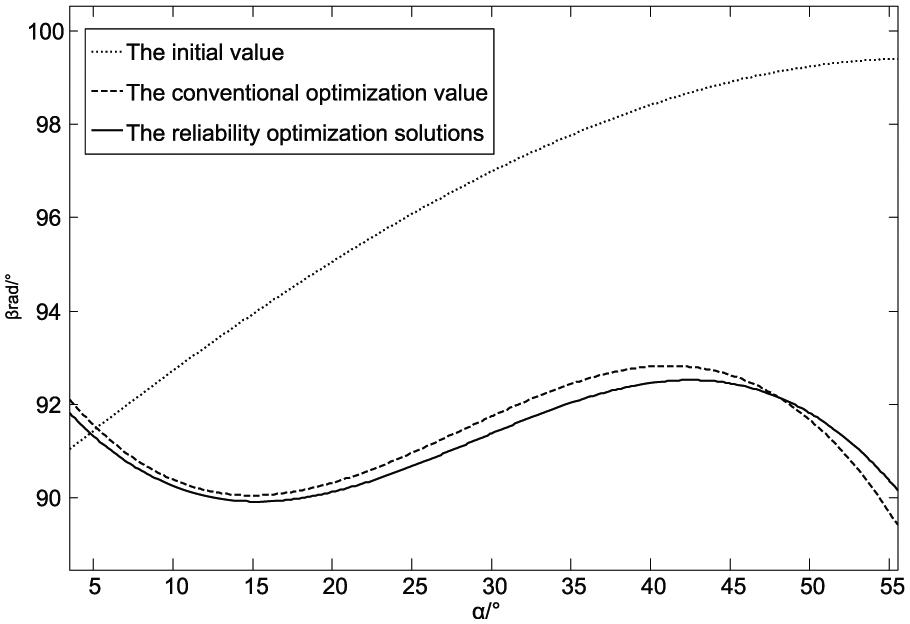
The relationships of the rising bow angle α and the deflection angle

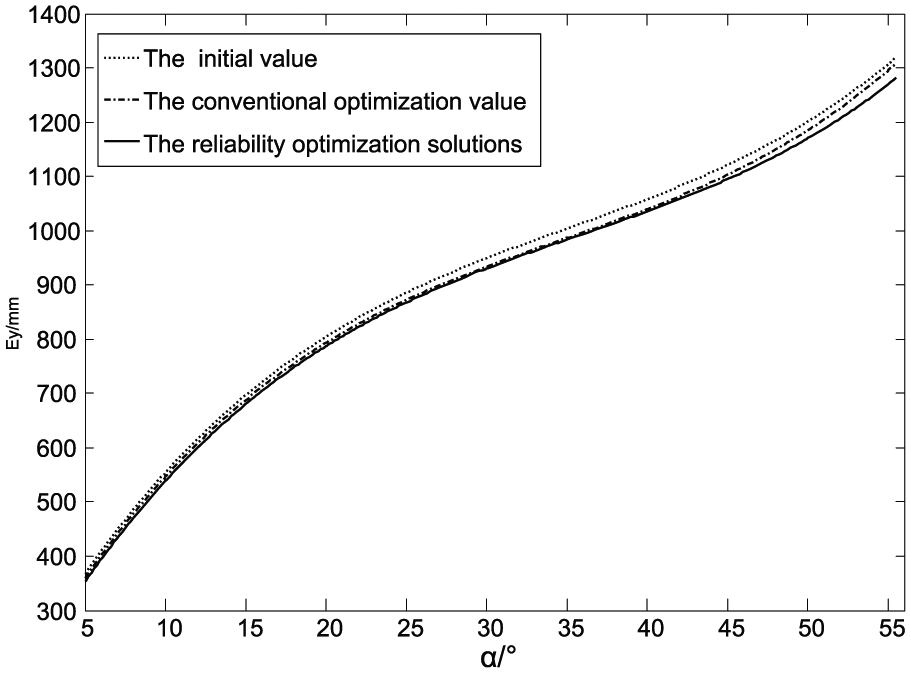
The relationships of displacement
From Figure 6 and Table 4, it can be seen that the pantograph height range of three kinds of parameter design will be between 300 and 1400 mm when the pantograph movement is between 5° and 60°. Therefore, the bow could normally work within the scope of 300–2250 mm.
The comparison between conventional design solutions and reliability design optimization solutions.

From Figure 7 and Table 4, it can be seen that the maximum deviation angle
From Figure 8 and Table 4, it can be seen that the working height Ey = 500–1300 mm, and the maximum deviation angle
From Figures 6–8 and Table 4, the fluctuation range caused by the interference factors was reduced, and a higher reliability of the performance was achieved.
Conclusion
In order to realize the EMU pantograph multi-objective reliability, the BBD was applied to consider a number of design variable parameters. The dual response surface method was introduced to calculate the reliability index of the multiple targets, and a multi-objective reliability design optimization model was built by combining with fuzzy preference method.
To guarantee the longitudinal migration and transverse offset in the direction of the pantograph head as small as possible, the pantograph reliability optimization model was established based on the pantograph under the normal working condition to obtain the reliability design solutions. The reliability of the performance was improved; the influence of the interference factors on the pantograph work was also reduced.
The study case indicates that the proposed method is available for EMU pantograph optimization. This method can also be extended to the reliability design optimization of other EMU components.
Footnotes
Academic Editor: Yongming Liu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partially supported by the program of National Natural Foundation under contract number 11272070, the program of Educational Commission of Liaoning Province under contract number JDL2016001, the program of National Natural Science Foundation of Liaoning Province under contract number 2014028020, and the program of the Dalian Science and Technology Project under contract number 2015A11GX026.