
Abstract
This article investigates the problem of designing a novel maneuvering decision-making method for the unmanned combat aerial vehicle. The design objective is to promote the real-time ability of decision-making method and solve the problem of uncertainty caused by incomplete target information. On the basis of statistics theory, a robust maneuvering decision method with self-adaptive target intention prediction is proposed. The robustness design is embedded in the membership function of the situation parameters. The reachable set theory and adaptive adjustment mechanism of the target state weight are used in the target intention prediction to promote the real-time ability. Simulations are conducted under the condition that the enemy aircraft perform both non-maneuvering and combat maneuvering. The results verify the good properties of the decision-making method, which can extend the survival time of the unmanned combat aerial vehicle when the enemy aircraft attacks, and short the taking position and attack time of the unmanned combat aerial vehicle when the enemy aircraft evades.
Introduction
Autonomous air combat decision is a mechanism regarding how the unmanned combat aerial vehicle (UCAV) choose tactical plan or maneuver action in real time during the process of air combat. The pros and cons of the mechanism reflect the intelligent level of the UCAV decision. Air combat decision can be taken as a system, and the input of the system is all kinds of parameters related to air combat, such as platform parameters, weapon parameters, and situation parameters. Decision-making process is the information processing mechanism within the system. The output of the system is the decision results, namely, tactical plan or some certain maneuvers.
Recently, the commonly utilized decision-making methods include expert system theory,1–3 differential games,4–6 rough set,7–9 Bayesian network,10–12 and swarm intelligence algorithm.13–15 Literature 16 studied the autonomous decision-making method of the unmanned aerial vehicle (UAV) under uncertain environment in intelligence, surveillance, and reconnaissance (ISR) task. However, the operators on the ground can also feed back the effect after the implementation of decision to the UAV in the loop. Literature 17 utilized fuzzy theory as a decision mechanism. The flight attitude of the enemy plane in next moment was predicted in the decision-making process, so as to decide the optimal flight tactical action of our plane. Literature 18 deeply studied the influence diagram and utilized multistage influence diagram to model the stand-alone air combat. Literature 19 studied tactical decision-making of the underwater vehicle to avoid torpedo. A method of tactical decision based on fuzzy logic was described. Furthermore, literature 19 utilized Python language to script the decision-making process and carried out experiments on engineering application simulation platform. Literature 20 utilized fuzzy logic and Bayesian network to construct a situation assessment system, which included pilot mental model, aircraft platform model, sensor model, and data processing algorithm. Li and Xiaoguang 21 studied the autonomous decision-making under the condition of close combat of the UCAV. According to the “variable value” theory in the machine game theory, the traditional payment function in the differential game model was improved, so that the decision result would be more reasonable. Literature 22 reviewed the methods of air combat decision; the characteristics of application are compared between various methods such as differential game, influence diagram, and expert system in air combat decision. The development trend of air combat decision-making method in the future is predicted. Literature 23 put forward an autonomous air combat maneuvering decision method based on tentative control input. Furthermore, on the basis of current aircraft status and tentative input parameters, artificial neural network was utilized to predict the state of the fighter plane. In literature, 24 based on excitation the idea that “pilots could predict maneuver of the enemy plane through the visual sense in air combat within sight distance,” a method for predicting maneuver of the enemy plane on the basis of image of the enemy planes was proposed. However, the premise of this method was that the airborne equipment can provide the image with certain precision, and it needed neural network to carry out the estimation. Furthermore, whether it can meet the real-time constraints is yet to be verified.
The main motivation of this work is to propose a robust and fast maneuvering decision-making method for the UCAV. The contributions of this article are as follows. (1) The basic maneuver library is extended so that the UCAV can perform the maneuvers that other typical maneuver libraries cannot achieve. (2) By embedding the robustness design into the membership function of air combat situation, the influences brought by uncertain target information could be overcome. (3) The reachable set theory and adaptive adjustment mechanism of the target state weight are used in the mechanism of target intention prediction, so that the real-time ability of the method is promoted and the UCAV can timely react to the rapid combat maneuvering of the enemy.
Establishment of the UCAV air combat model
UCAV particle model
For the high-level maneuvering decision, the particle model of the UCAV platform can meet the requirements. Model parameters are presented in Figure 1. The particle model is shown as below



where x, y, and z indicate the positions of the UCAV in the inertial coordinate system;



In equations (4)–(6), the first controlled variable



where

Definition diagram of particle model parameters.
Basic maneuver library
The establishment of the maneuver library of the unmanned combat aircraft can draw lessons from tactical actions when fighter pilot conducts air combat. According to the common way of air combat maneuvering, NASA scholars 25 have designed seven typical flight maneuvers at a constant speed, as shown in Figure 2: (1) continued stable flight, (2) maximum acceleration flight, (3) maximum deceleration flight, (4) maximum G-force left-turn flight, (5) maximum G-force right-turn flight, (6) maximum G-force upward flight, and (7) maximum G-force downward flight. For the constraint of maximum overload, only the physical structure limit of the UCAV platform needs to be considered. Without the capacity which constraints the pilot’s body, the maneuvering performance of the UCAV can be fully realized in air combat.

Typical maneuver library. 25
However, the maneuver contained in the maneuver library is single and can be moved only in two separate planes without considering the actual situation of the air combat. As shown in Figure 3, this article expands the maneuver based on the problems in the above typical maneuver. The extended maneuver library contains the top-right, top-left, bottom-left, and bottom-right maneuver, and maneuver in each direction includes three classes of state, including acceleration state, deceleration state, and uniform state. By extending the maneuver library, the UCAV can perform the maneuvers such as oblique loop, chandelle, and drum maneuver which other typical maneuver libraries cannot achieve.

Extended maneuver library: (a) principle diagram and (b) MATLAB simulation diagram.
Robust design of air combat situation function
According to the presentation of advantages and disadvantages of air combat situation in the literature,
18
as shown in Figure 4, the air combat situation can be further divided into equilibration, advantages, disadvantages, and badness to each other; the purpose of air combat decision is to transform any situation into advantageous situation. Four parameters can be utilized to characterize the current air combat situation in the process of air combat:
18

Air combat situation diagrams.
The membership function




In the above equation, subscript u means the UCAV, subscript e means the enemy aircraft, and the definition of

Orientation variable membership function.

Position and distanced diagram.
When the distance between the enemy aircraft and the UCAV is less than the missile attack distance, in order to make the UCAV decision result have certain robustness, the membership function

In the above equation,
The membership function

In the above equation,

where
Same as the membership function of distance parameter, in order to enhance the robustness of the UCAV decision, the membership function
In the above equation,
As can be seen from the membership function of the above four parameters, when the four membership function values are gradually approaching 1, the UCAV is in the taking position and attack situation. If they are approaching 0, the UCAV is in the attacked situation.
In conclusion, the general situation assessment function of the UCAV is represented as follows

where
UCAV robust maneuvering decision method based on the statistics theory
The UCAV MIN-MAX decision method based on the fuzzy logic was put forward by the literature 18 and is further improved in this article. The decision method used in the literature cannot ensure that the membership functions of four situation parameters keep increasing monotonically during the decision process, and eventually converge to 1.
Aiming at the problems of the timeliness and accuracy of information, we improve the membership function of situation evaluation during the decision process on the basis of the MIN-MAX decision method, in order to make the situation function have a certain insensitivity to air combat situation change and then turn into the robustness of decision result. However, statistical theory is applied to make the maneuvering decision process fully consider the combined action of situation parameters during the decision process. Thus, it can be ensured that tUCAV will eventually reach the situation dominant area in the autonomous air combat. Based on the statistical theory, the specific process of decision method is shown as follows:
Step 1. Based on the information of the UCAV and the enemy aircraft at the current time t, send the control command of all the actions in the maneuver library to the particle model for maneuver trial.
Step 2. All the possible locations of the UCAV in the next stage are obtained through step 1; resolve the situation at each position. Thus, the set can be obtained as below

where i means the serial number of maneuver, and the membership value set of the situation parameters conforms to all the maneuvers as below

Step 3. Solve the mean and standard deviation of

For
Step 4. Update time, and return to step 1.
However, from the numerical simulation experiment, we find that when targets fly with non-maneuvering, the UCAV maneuvering decision can find out the maneuver with robustness and the optimality in time. When targets fly with maneuvering, the above method still cannot response to the enemy maneuver behavior timely. In order to solve this problem, we put forward a prediction method of adaptive variable weight to predict the state of the enemy aircraft on the basis of the above decision method. The statistical principle decision method is adopted for maneuver on the basis of the prediction results, to further enhance the real-time performance of the algorithm.
The UCAV robust maneuvering decision based on the reachable set theory at prediction target state
Reachable set calculation method of the enemy aircraft state
Reachable set is the set of all states in the system under specific constraints. 26 It can be divided into forward reachable set and backward reachable set. This article chooses the forward reachable set according to the characteristics of the air combat. Assuming that the dynamics equation of the enemy aircraft motion is expressed by the following equation

where
It is unrealistic to calculate the forward reachable set at one point using all the control variables of the enemy aircraft because of the real time and high dynamics of air combat. Thus, considering the aims of reachable set is to predict the state of the enemy, there is no need to traverse all the values of controlled variables. In this article, we select some representative element such as maximum acceleration, maximum deceleration, and maximum overload for calculation.
Adaptive variable weight more multi-state prediction method
The UCAV mainly focuses on three aspects of state prediction of the enemy aircraft. The first aspect is the probability for the enemy aircraft to continue to fly under the current state. The second aspect is the probability for the enemy aircraft to detect the UCAV and take attack strategy. The third is the probability that the UCAV cannot estimable the strategy of enemy aircraft for the next moment. In terms of the three aspects as above, it is proposed to utilize the weight instead of probability and design the adaptive adjustment mechanism of the weight.
Let the enemy aircraft’s forward reachable set be

Three extracted state elements

where
Assuming that the state of the enemy at previous time (

where

In the above two equations, * denotes keep and threat;
Let the maximum and minimum values of the close degree at the prediction state of

where
In order to guarantee the normalization of the weight, the weight is normalized after the formula is updated, and then is substituted for the enemy aircraft state prediction. When the enemy aircraft flies under the current state, the
Decision process
Based on the multi-state prediction of adaptive variable weight of the enemy aircraft, combined with the statistics principle, the UCAV maneuvering decision method based on the combination of reachable set target state prediction and the principle of statistics is put forward. The decision process is shown in Figure 7.
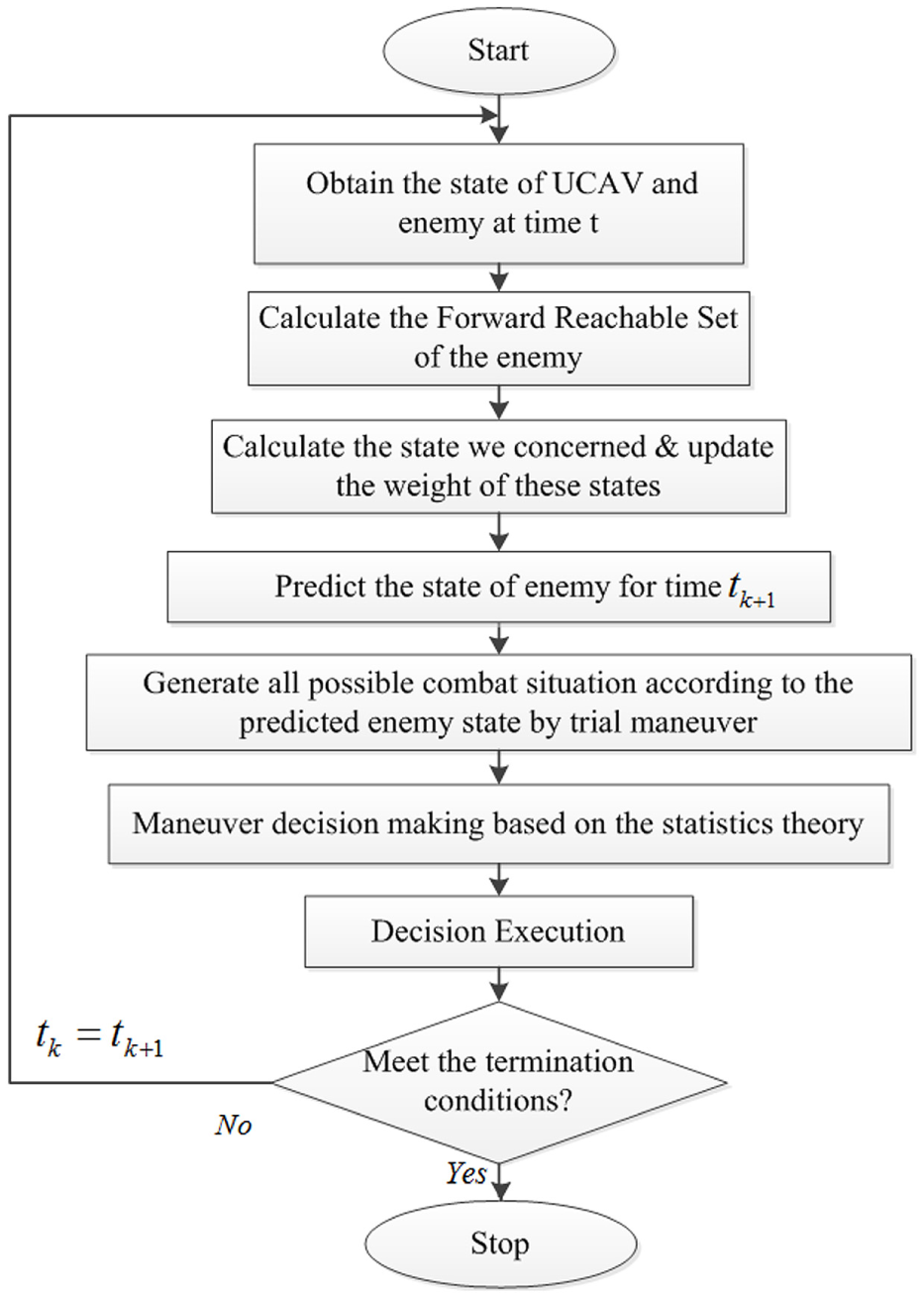
Flow chart of maneuvering decision based on the target state prediction.
Time complexity analysis
The time complexity of our method can be estimated as follows:
In the part of initialization, the time complexity is
In the part of prediction, the time complexity is
In the part of decision-making, the time complexity is
In other parts, the computational complexity is rather simple, which can be neglected.
To summarize, the overall time complexity of our method is
Simulation analysis
This section carries out the simulation comparison between the UCAV maneuvering decision method based on the MIN-MAX maneuvering and the UCAV maneuvering decision method based on the multi-state prediction of reachable set target. The performance of the proposed method is verified in this article.
The settings of general simulation parameter are presented as follows:
Considering the radar-cross section (RCS) from broadside and tail of stealth target is larger, the superior situation description in the modified membership function of situation parameters is changed to be when
The initial value of the enemy aircraft prediction state weight is set as
Case 1: UCAV encounters the enemy from ahead, and the enemy aircraft flies straightly
The initial flight status of the enemy aircraft is as follows: position (3000, 3000, 3000), speed of 204 m/s, track angle 0°, and course angle −135°. Initial flight state of the UCAV is as follows: the location (0, 0, 2700) m, speed of 250 m/s, track angle of 0°, and course angle of 45°. In order to verify the proposed method under the situation where the enemy flies without maneuvering, we assume that the enemy aircraft does not react to the attack action.
As shown in Figures 8 and 9, the black line refers to the trajectory prediction of the enemy. The red and blue lines alternate in the figure means the trajectories of both aircrafts correspond to each time quantum.

Decision simulation based on the proposed method.

Simulation of the decision based on the MIN-MAX method. 18
Figures 10 and 11 show the membership function curve of situation parameters under the non-maneuvering condition of the enemy aircraft. The UCAV can reach the conditions of taking position in 18 s with the proposed method. By contrast, it takes longer time (22 s) to reach the taking position with the MIN-MAX maneuvering decision method.
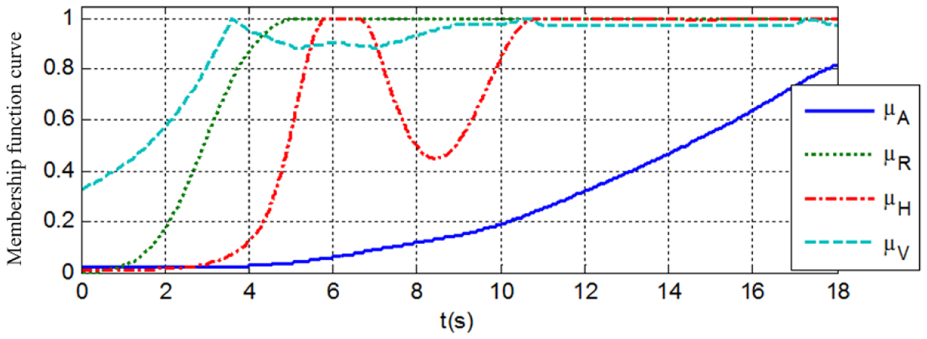
Membership function curve of the proposed method.

Membership function curve of the MIN-MAX maneuvering decision method. 18
As can be seen in Figure 12, with the proposed maneuvering decision method in this article, the UCAV achieves the direction advantage at 18 s. The four situation parameters have exceeded the conditions of threshold setting, realizing the position taking and the simulation is terminated. By contrast, with the decision method based on the MIN-MAX maneuvering, the UCAV realizes the direction alignment at 20 s. Combining Figure 11 with Figure 12, we can see that the membership parameter of height fails to meet the threshold condition until 25 s. By comparison, results verify the rapidity and superiority of the proposed method in this article.

Comparison of relative direction situation of the two decision methods: (a) maneuvering decision method based on the target state prediction and (b) maneuvering decision method based on the MIN-MAX maneuvering.
Figure 13 shows the trend of weight change with the adaptive adjustment ability in the target state prediction decision method. As can be seen from the figure, the weight
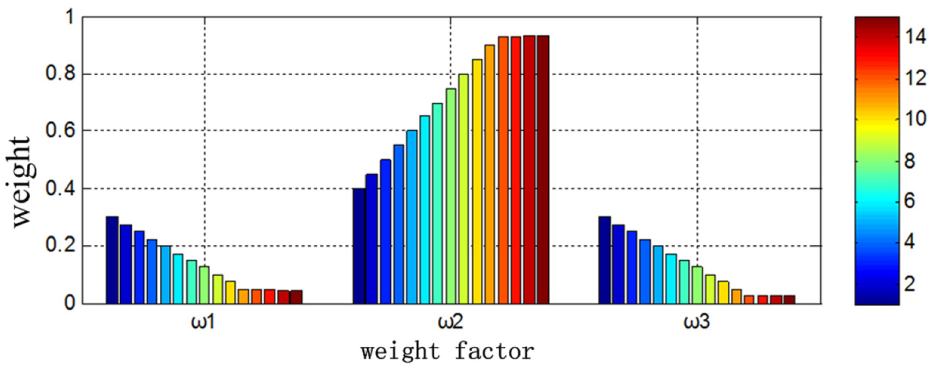
The eight change map.
Case 2: The UCAV encounters the enemy from ahead, both side carry out the attacking maneuvering
The initial flight state of the enemy aircraft is set as follows: position (2500, 2500, 3000) m, speed of 204 m/s, track angle 0°, and course angle 90°. The UCAV initial flight state is as follows: position (2500, 1500, 2700) m, speed of 250 m/s, track angle 0°, and course angle 90°. Considering the simulation duration constraints, the initial position of the enemy aircraft is set to be closer to that of the UCAV, and the simulation results of the two methods are shown in the two figures as follows.
The three-dimensional (3D) simulation results of Figures 14 and 15 show that the maneuvering decision method based on the target state prediction makes the combat time of the UCAV with the enemy aircraft longer than the decision method based on the MIN-MAX maneuvering. The black line refers to the trajectory prediction of the enemy. The red and blue lines alternate in the figure means the trajectories of both aircrafts correspond to each time quantum.
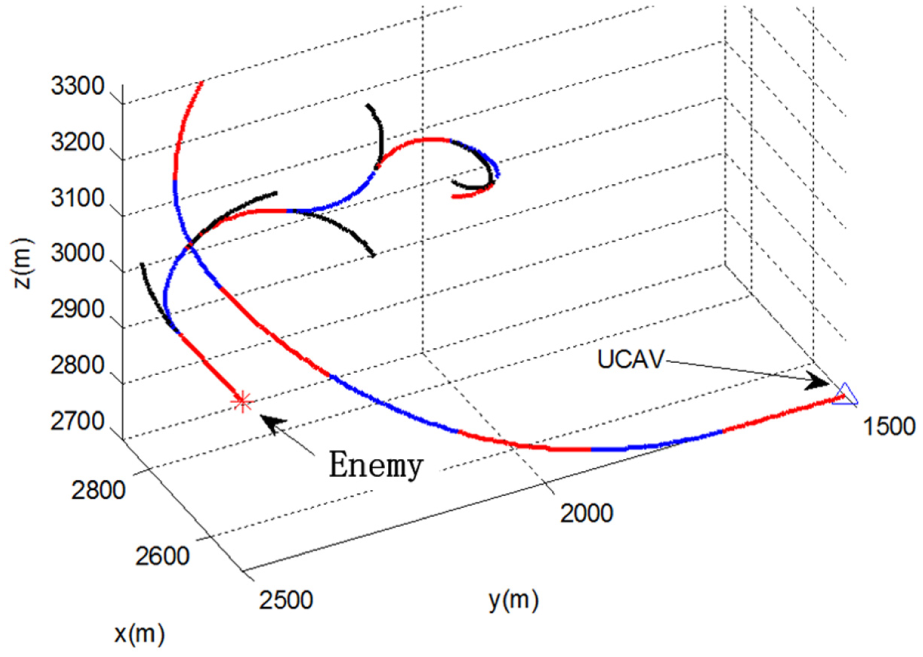
Simulation results based on the proposed method.

Simulation results based on the MIN-MAX maneuvering decision method. 18
Figure 16 shows the comparison of the situation parameter change curve with membership functions based on the two methods. The thick curve in the figure shows the results of the decision method based on the MIN-MAX maneuvering. At the beginning of the simulation, there is no big difference between two decision methods, and the UCAV is not in the passive situation. However, as time goes on, the enemy aircraft begins to carry out the attacking maneuvering, making drastic changes in situation. The decision method based on the MIN-MAX maneuvering stops the simulation at 3 s, and the decision method based on the prediction simulation of target state stops the simulation at 7 s. In the simulation process, although the membership degree of the position parameter shows a short increasing trend, the general trend reduces constantly. It shows that the UCAV situation gets worse, and the conclusion can be verified from Figure 17.

Comparison of the membership function curve.
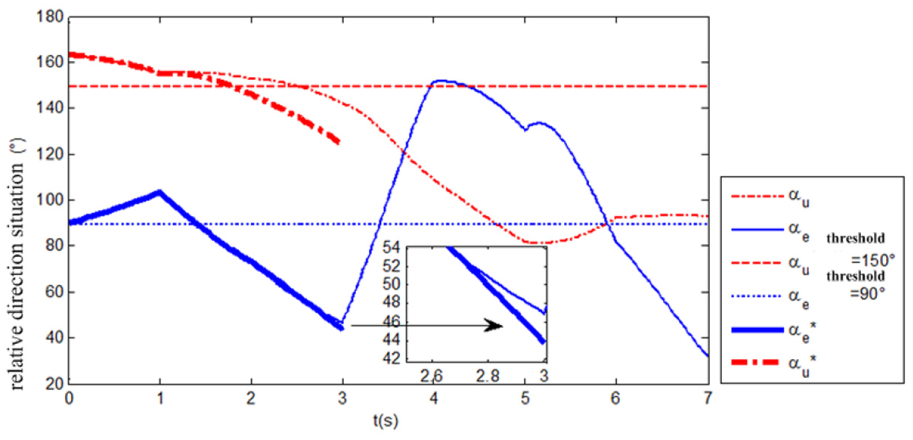
Comparison of the relative direction situation experienced by two decision methods.
Figure 17 shows the comparison of the relative direction of the situation. The thick line in the figure is the corresponding direction situation curve of the decision method based on the MIN-MAX maneuvering. According to the constraints set by the simulation, the decision result of decision method based on the MIN-MAX maneuvering makes the relative direction situation of the UCAV worse at 3 s. The UCAV enters into the attack direction of the enemy aircraft. The result of the decision method based on the target state prediction is slightly better than the former one, and the subsequent decision result makes this trend to enlarge. However, the UCAV falls into the attack range of the enemy aircraft due to the platform gap at 7 s.
Figure 18 shows the trend of weight change in the target state prediction decision method. As can be seen from the figure, the weight
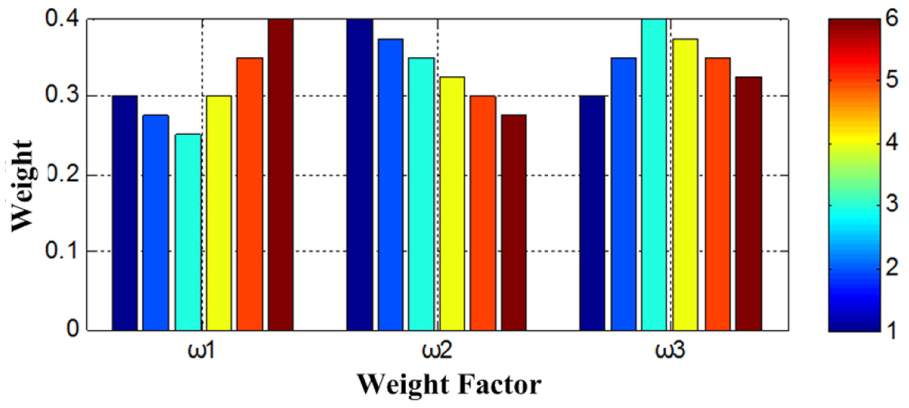
Weight value change trend of target state prediction.
Case 3. The enemy evade and the UCAV attack
When the enemy aircraft (such as the stealth bombers) with stealth performance attacks the ground target, it would try to avoid entanglement with fighter jets, and often chooses the quickest and smallest maneuvering to remain hidden and avoid attack. Under this context, the initial conditions of the simulation are set up as follows: the initial position of the enemy aircraft (2000, 2000, and 3000), speed of 204 m/s, track angle of 0°, and course angle of 90°. The initial flight state of the UCAV is as follows: location (0, 0, and 2900) m, speed of 200 m/s, track angle 0°, and course angle 0°. The simulation results are shown in Figures 19 and 20.

Decision simulation result based on the proposed method.

Simulation result based on the MIN-MAX maneuvering decision method. 18
From the 3D simulation results, both the methods can make the UCAV turn right and climb to attack the enemy aircraft, as the enemy aircraft will choose the appropriate maneuver in real time according to the situation; during the process of simulation, there is a slight difference between the enemy aircraft tracks in Figures 19 and 20. According to Figure 19, there is little difference between the predicted state of the enemy and the actual state of the enemy. It shows that the state prediction of the enemy aircraft by the method is accurate.
According to the membership function curve of situation parameters as shown in Figures 21 and 22, it takes only 8 s to realize the taking attack position with the proposed method, while it needs longer time (10 s) using the MIN-MAX maneuvering decision method. The global combat situation based on the proposed method is much better than that based on the MIN-MAX maneuvering decision method.

Membership function curve based on the proposed method.

Membership function curve based on the MIN-MAX maneuvering decision method. 18
Conclusion
This article proposes a novel maneuvering decision-making method that combines with a mechanism of target intention prediction. The basic maneuver library is extended so that the UCAV can perform the maneuvers that other typical maneuver libraries cannot achieve. The method is capable of overcoming the uncertainty which is brought by the incomplete information of the enemy. The reachable set theory and adaptive adjustment mechanism of the target state weight are used in the target intention prediction so that the real-time ability is promoted. Simulations verify that the method can effectively forecast the general location of the enemy, short the time of taking position and attacking of the UCAV when the enemy aircraft evades, and extend the UCAV survival time when the enemy aircraft attacks.
In future works, first, the presentation of this article has preliminarily assumed that all the flight states of the enemy aircraft are accurately measurable. However, the noise will inevitably appear in the system, so the noise-perturbed situation is needed for applications. Second, since the state of the enemy is hard to be acquired, the reachable set calculation of the enemy aircraft in the article is based on the parameters of the UCAV. Thus, difference may exist during the reachable set calculation process, so there is still a huge space for development of the reachable set calculation method and this will be one of our future studies.
Footnotes
Academic Editor: Gang Chen
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.