
Abstract
In order to isolate the structural vibration in high-frequency range effectively and constrain the peak response value near the natural frequency, an experience method using electromagnetic-air spring vibration isolator was put forward based on the respective advantages of electromagnetic actuator and air spring. In this article, a stiffness expression and a natural frequency of the system was worked out. A dynamic model of the electromagnetic-air spring vibration isolator system and an expression of the force transmission were established. Moreover, the relationship between stiffness variation and performance of the electromagnetic-air spring vibration isolator system was analyzed. The calculation and simulation analysis of the example demonstrated that in the condition of satisfying loading capacity with the increase in magnetic suspension isolator’s displacement stiffness and the decrease in air spring’s stiffness, the performance of vibration isolation is improved.
Introduction
Active and passive hybrid vibration isolation technology refers to the way of integrating active and passive isolators in parallel or in series, making the passive vibration isolator to support the load of equipment and using synchronously active vibration isolator to actively control and decrease low-frequency vibration. The so-called electromagnetic-air spring active and passive hybrid vibration isolator consists of active and passive isolators integrated in parallel or in series. Among all kinds of active vibration isolators, magnetic suspension active vibration isolator (MSVI) is an ideal active vibration isolator, for its controllable stiffness and damping, wide spectrum band, fast response, easiness to control, and flexible control method.1,2 Air spring has predominance among passive vibration isolators because of its great bearing capacity and low natural frequency. 3 By means of integrating them in parallel or in series, electromagnetic-air spring active and passive hybrid vibration isolator can be obtained, which overcomes defects of low-frequency resonance of air spring and energy consumption and poor performance at high frequency of MSVI, improving the performance of vibration isolation system of submarine.
Electromagnetic-air spring active and passive hybrid vibration isolator is designed to give full play to the advantages of both of MSVI and air spring. But in most cases, they are devised to combine simply as separate components. KG Ahn et al. 4 built a hybrid vibration isolation system consisting of one MSVI and three air springs. Simulation and experiment in this article indicated that the transmission rate of the vibration isolation system is lower than 0.63 over the range of 0–20 Hz frequency bands, including the resonance frequency. Liu et al. 5 designed a vibration isolation foundation through integrating MSVI and air spring in series in order to realize vibration isolation at ultra-low frequency in condition of heavy load. The patented foundation can reduce the natural frequency to 0.7 Hz. A hybrid isolator integrating MSVI and air spring in parallel is also designed. The result of research indicated that MSVI can improve vibration isolation performance at ultra-low frequency, as well as in the system resonance range. It can be concluded that the combination of both of them can improve vibration isolation performance, but the simple integration of MSVI and air spring in parallel or in series is complicated to install, has low system integration, and occupies a large space. Therefore, the future development of electromagnetic-air spring vibration isolator (EMASVI) is to integrate both of them into one space.
Kim et al. 6 studied EMASVI for several years and in their design electromagnetic actuator was mounted in air chamber of air spring. It was concluded that after implementing active control, impulse response delay time decreased 77%, resonance frequency of the system improved, and the vibration peak reduced 62%. And then they built an EMASVI model with 3 degrees of freedom, including a vertical displacement, an inclination angle, and a rotating angle and carried out a shock experiment. 7 The result of experiment indicated that stabilization time of this model reduced to 25% compared to that of the model with 1 degree of freedom. Electromagnetic actuator was installed around air spring in another paper about EMASVI. 8 The result of shock research showed that compared to air spring, the resonance peak of the hybrid vibration isolator reduced 10 dB. He et al. 9 patented a kind of EMASVI through installing magnetic suspension isolator in the interior space of air spring. After the structural design was conducted, prototype experiment was carried out under active control of improved the filtered-x least mean square (FXLMS) algorithm, which was under frequency dividing control. The result showed that the isolator had excellent broadband isolation and vibration control performance of low-frequency line spectrum.
In summary, the research on EMASVI is still in initial stage and more work about the characteristics of EMASVI needs to been done. Especially there is no essay related to research on stiffness characteristic of hybrid vibration isolator. Structural design and further study need to be carried on.
Variable stiffness is an important characteristic of active and passive hybrid vibration isolator. High stiffness will influence the performance of vibration isolation system. Generally speaking, isolator with less stiffness is used to have better effect on vibration isolation in designed working conditions. However, low stiffness has an adverse effect on vibration isolation during the launching period of machine (ultra-low-frequency region) leading to insufficient strength for heavy load. 10 Thus, if the stiffness is a constant value, the system can not have an ideal performance. While structure of variable stiffness is taken, original stiffness is made low to ensure the effect of vibration reduction. When the amplitude increases, high stiffness system begins to work, providing static strength, having the function of negative limit, and having the effect of shock resistance in ultra-low-frequency region. 11 Accordingly, the structure of variable stiffness is supposed to be able to improve performance of the vibration isolation system during the whole operation.
In this article, improvement design based on previous researches for structure of EMASVI was worked out. Structural compactness and the seal between air spring and MSVI were improved, after the structure of MSVI encircled by air spring is taken. And the maintainability of MSVI is kept available. In addition, stiffness of MSVI and air spring was designed, and characteristic of variable stiffness of active and passive hybrid vibration isolator was studied. Example calculation and performance analysis of vibration isolation demonstrated that the increase in magnetic suspension isolator’s displacement stiffness and the decrease in air spring’s stiffness when the loading capacity is satisfied can improve the performance of vibration isolation.
Structure of EMASVI
Figure 1 shows the structure of EMASVI. It consists of an air spring and an electromagnetic actuator which is located in the air spring in parallel connection. It is characterized with compact structure, small size, and high level of integration.

Structure of EMASVI.
Since the electromagnetic force of electromagnetic actuator has a nonlinear relationship with air gap and control current, it will be complex to control. In this article, we use a differential electromagnetic vibration isolator which is composed of one armature and two electromagnets in a symmetrical arrangement of the armature. Applying a certain current in upper and lower coils can make the opposite surfaces of the two electromagnets have the same polarity, creating contrary electromagnetic force on the armature. The difference between the upper and lower electromagnetic forces is the active force of the actuator.
There are three kinds of structures of air spring: capsule type, membrane type, and hybrid type. 12 Their chambers all comprise one capsule, one plate, and one base. If we put the electromagnetic actuator in the chambers, the air tightness of air spring will be impacted when the electromagnetic actuator is maintained or changed. Hence, a type of annular air spring was designed. The annular air spring consists of two flanges, one plate, one base, one inner capsule, and one outer capsule. The flanges are designed to prevent overload and limit the deformation of inner and outer capsules, which are composed of reinforcing cords and rubber layers. The plate, the base, and the inner and outer capsules form a close chamber. The closed chamber filled with compressed air can achieve vibration isolation capability. The inner capsule has an unclosed chamber, in which we can install the electromagnetic actuator. Then, we can repair or replace the actuator without breaking the air spring’s seal performance.
The EMASVI’s function of reducing the vibration is achieved when the annular air spring and the electromagnetic actuator are connected in parallel. The annular air spring whose chamber is filled with compressed air is used for bearing the weight of vibration isolated equipment and effectively isolating high-frequency vibration. 13 The change in the inflation pressure can adapt to different load conditions. The armature of the actuator is fixed on the plate of the air spring. So the electromagnetic force exported by the electromagnetic actuator shall be directly transmitted to the plate and will act on the vibration isolated equipment. Low-frequency vibration can be isolated by controlling the electromagnetic force. As a result, the EMASVI can isolate high- and low-frequency vibrations.
Stiffness characteristic
Electromagnetic actuator
There are three assumptions for the electromagnetic actuator. The first one is that the magnetic field sections of electromagnets, armature, and air gaps are uniform. Second, the iron core is unsaturated. The last one is that in addition to the air gap, all magnetic flux go through the iron core, and the influence of magnetic leakage and hysteresis can be ignored.
The relationship among electromagnetic force, air gap, and control current of the differential electromagnetic actuator is deduced by the magnetic circuit method, as shown in equation (1)

In the equation, fe is the active force with an upward positive direction; i0 is the bias current, the value of the isolator’s stiffness is depended on it; i is the control current, the value of i is determined by external vibration, the function of which is to isolate external vibration; x is the armature’s displacement deviated from the middle position; i and x are functions of time, described as i = i(t), x = x(t). x0 is the air gap between the armature and the electromagnet when the armature is in the middle position; µ0 is the permeability in vacuum; µr is the relative permeability of air; N is the number of the coil; An and Aw are, respectively, the areas of the inner and the outer electromagnetic poles. Expanding equation (1) using a Taylor series and ignoring the infinitesimal of higher order, at x = 0 mm and i = 0 A, equation (2) is got

where kx is the displacement stiffness of the electromagnetic actuator

And ki is the current stiffness

Equation (2) indicates that the electromagnetic force has a linear relationship with control current when the armature moves in a small range near the middle position of the two electromagnets.
In terms of a given electromagnetic actuator, the displacement stiffness kx is a negative constant which will lead to the negative stiffness of electromagnetic actuator. Since the displacement stiffness has a linear relationship with the square of the bias current i0, the displacement stiffness, kx, can be changed by adjusting the bias current, i0, and by doing so the stiffness of the vibration isolation system will become controllable and adjustable. If the control current is proportional to the vibration velocity v of the vibration isolated equipment, we can consider that the isolator can provide an active damping force with damping factor ci = kii/v. So we can regard the electromagnetic actuator as a structure in which a spring with negative stiffness and an active damper are in parallel connection. Then, the active force, changing over time, is described as
Air spring
The parameters of the annular air spring are shown in Figure 2, where the solid lines indicate the working position, and the hidden lines indicate the design height. rw is the radius of the flange; x0 is the height of the design height; Re is the distance from the center of the capsule’s freedom circle to the symmetry line of the inner capsule and the outer capsule; R is the distance from the capsule to the symmetry line of the inner capsule and the outer capsule; R0 is the radius of the symmetry cylindrical of the inner capsule and the outer capsule; r0 and θ0 are, respectively, the circular arc radius and the half central angle of the capsules’ free deformation part at the design height; r and θ represent the angles at the working height; and Δx is the relative displacement of the plate to the design height. Under the internal pressure P, the bearing capacity of air spring can be calculated

In the equation, Ae is the effective pressure bearing area of air spring, in this structure


Sectional drawing of air spring.
Assuming the air spring seal performance is very good, the leak can be ignored. In the course of work, the air spring is disconnected from the air supply, the mass of air in air spring stay the same, and air pressure satisfy the gas thermodynamic equation

In the equation, P0, V0 are, respectively, air spring’s internal pressure (gauge) and volume in the design position, Pa is atmospheric pressure; V is the volume when the height change of Δx was made for the plate; and m is the load of the air spring. It is assumed that the gas in the capsule is isothermal under static loading, m = 1.0, when the gas is under dynamic loading, the gas is adiabatic, m = 1.4.
Taking the derivative of equation (5), through equations (6) and (7), the stiffness of air spring can be calculated as follows

From equation (8), the stiffness of air spring is determined by the rate of change of effective bearing area and the change of volume. Assuming that the capsule is not stretched during deformation, the following equations can be got according to the geometric properties

In this equation, both r, θ are a function of the air spring theta plate displacement x,

Volume change rate of air spring

Substituting equations (10) and (11) into equation (8), the stiffness of the air spring can be calculated, as shown in equation (12)

where


Then, the natural frequency of the air spring at the design height is shown in equation (15)

The damping of capsule spring is very small and is mainly measured by experiments. For this reason, the damping of the proposed air spring is not analyzed in this article.
Stiffness of the EMASVI
MSVI can be simplified as a parallel structure consisting of a linear spring and a damper. EMASVI is installed between the device and foundation. Assuming the foundation is rigid, the system model of vibration isolation is shown in Figure 3, where m is the weight of the device; cp and kp are the damping coefficient and the stiffness of the air spring. x(t) is the vibration displacement of the device and fd(t) is device exciting force and downward direction is the positive direction. When the movement of armature is a small range in the middle of two coils, the relationship between the electromagnetic force Fe and the armature displacement x can be seen as linear, in this article some linear treatments has been done.

Model of EMASVI system.
According to the transfer law of the vibration, 14 the kinetic equation (16) of EMASVI can be acquired from vibration isolation system model in Figure 3

By Fourier transforming equation (16), the transfer function is obtained as shown in equation (17)

By substituting j and ω for s, the frequency response function is acquired as presented in equation (18)

And then the expression of system stiffness is got, as shown in the following equation (19)

EMASVI is a parallel structure consisting of MSVI and air spring. The total stiffness is the sum of each one of the parallel institutions stiffness. The total stiffness of MSVI, k, equals the sum of the MSVI stiffness kp and the stiffness of air spring kx

From equation (20), two conclusions can be acquired:
kx is negative and kp is positive. According to the limit conditions of equations (3) and (12), the total stiffness k of EMASVI will never be negative.
According to equations (3) and (12), it is concluded that when the structural dimensions of air spring and MSVI remain unchanged, the vibration isolation stiffness can be adjusted through controlling the bias current of the active vibration isolator, and by doing so vibration isolation requirements at different stages and frequencies can be met.
The relationship between stiffness variation and performance
Calculation of example
A diesel generator unit is taken as an object of vibration isolation. The unit consists of a 16V396SE84-GB31L turbocharged diesel engine produced by MTU Company and a NTB50.50-8 AC rectifier charging generator manufactured by Piller Company. Rated speed of the unit is 1800 r/min, and the weight is 20 t. Dimensions of the unit are as follows: the length is 4928 mm, the width is 1600 mm, and the height is 2895 mm. 15 According to “Mechanical Vibration: Vibration Testing Requirements for Shipboard Equipment and Machinery Components” (GB/T 19845-2005, China), the vibration frequency of general equipment and machinery is usually smaller than 100 Hz. The excitation force here is fd(t) = 2000sin(wt), and the unit is N. The frequency range is 0–100 Hz. Four EMASVIs are used for vibration isolation, and each one carries 50,000 N, and each electromagnetic actuator offsets maximum 500 N.
The parameters of air spring and electromagnetic actuator are shown in Table 1.When Δx = 0 mm and i0 = 3 A, the armature is in the middle position. At this time, the active force of electromagnetic actuator is 648 N as calculated by equation (2), meeting the requirements of the highest exciting force. By calculating, the displacement stiffness is kx = −129,630 N/m and the current stiffness is ki = 216 N/A. When the unit’s vibration is at the maximum intensity of 10 mm/s, the damping factor is ci = 64,800 Ns/m.
The parameters of air spring and electromagnetic actuator.

When the plate moves in different displacement from the design height, the vertical carrying capacity of the air spring is calculated, and the results are shown in Table 2. The negative value indicates that the air spring is in relative stretching status, and positive value shows the opposite.
Theoretical calculating values of the air spring’s vertical carrying capacity.

Table 2 indicates that the air spring bearing capacity can reach 60,000 N at design height, meeting the capacity requirement. At the design height, the displacement stiffness of air spring was 1,479,900 N/m as calculated by equation (5), and its natural frequency was 2.74 Hz as calculated by equation (8). What is more, the natural frequency of an air spring series JYQN ranges from 3 to 5 Hz, 16 so the inherent frequency of the air spring is designed to be lower, maintaining the characteristics of low natural frequency.
Performance analysis
The EMASVI is assembled between the generator unit and base. Assuming the floor is rigid, the model of the vibration isolation system can be simplified as Figure 4, where x(t) is the displacement, and m is the mass of the generator unit, whose exited force is fd(t). c1 and k1 are, respectively, the damping coefficient and the stiffness of the air spring, at the design height, c1 = 17,578 N s/m, k1 = 1.545 × 106 N/m. fe(t) is the controllable active force of electromagnetic actuator and

Dynamic model of the EMASVI.
According to the transfer rule of vibration, equation (14) can be got from Figure 4

Before the electromagnetic actuator works, the vibration isolation system is passive; after the electromagnetic actuator starts working, it will become a hybrid system. We utilized the force transmission as the vibration isolation effect evaluation index.
The force transmission of the passive vibration isolation system is shown in equation (22)

The force transmission of the hybrid vibration isolation system is shown in equation (23)

In the passive vibration isolation system, ωnp and ξp refer to natural frequency and damping ratio, where

At the same time, in terms of the hybrid system, ωnh and ξh refer to natural frequency and damping ratio, where

Then, the force transmission expressions above can be changed to equations (24) and (25)

The force transmission curves of the hybrid vibration isolation system are shown in Figure 5. i0 = 0 means that the electromagnetic actuator is in a state of no electric power, and the system is passive only with working air spring. i0 = 3 A, i0 = 3.5 A, and i0 = 4 A mean that the electromagnetic actuator is applied bias current of 3, 3.5, and 4 A, respectively, and the control current of 2 A. In design, the maximum working current of the coil Im = 8 A, assuming the maximum bias current i0 is equal to the maximum control current imax,i0 = imax = 4 A. So in this article, there is no consideration of the bigger bias current. Furthermore, there is a little change of force transmissibility with the increase in bias current, so more study makes no sense.

Force transmission curves of the EMASVI system.
Figure 5 illustrates that the natural frequency of the hybrid vibration isolation system reduces along with the increasing of the bias current. The natural frequencies are 2.62, 2.57, and 2.52 Hz. All of them are lower than 2.74 Hz, which is the natural frequency of the passive system. Therefore, the negative stiffness of the electromagnetic actuator reduces the natural frequency of the hybrid vibration isolation system, broadening the scope of low-frequency vibration isolation, and this improves the system low-frequency vibration isolation effectiveness. The natural frequency of EMASVI can be adjusted and controlled by changing the bias current. In the resonance frequency of the passive system, the resonance peak was improved by 10 dB to achieve ξh > ξp. It means that the EMASVI greatly improves the vibration performance of the resonance frequency.
The EMASVI system keeps the advantages of the air spring, such as low natural frequency and good vibration isolation effect at high frequency and reduces the large amplitude displacement at the resonance frequency. The EMASVI system can improve the vibration performance at low frequency by utilizing electromagnetic actuator. The EMASVI keeps a good vibration isolation performance with structural advantages.
The relationship between stiffness variation and performance
According to section “Calculation of example,” air spring has a characteristic of variable stiffness. In the range of 0–1.5 mm, the stiffness of air spring can be rounded to the stiffness at the design height. While in the range of −1.5 to 0 mm, the designed stiffness of air spring will look like Figure 6, and the range of stiffness is 1.545 × 106–2.1012 × 106 N/m.

Stiffness curve of air spring.
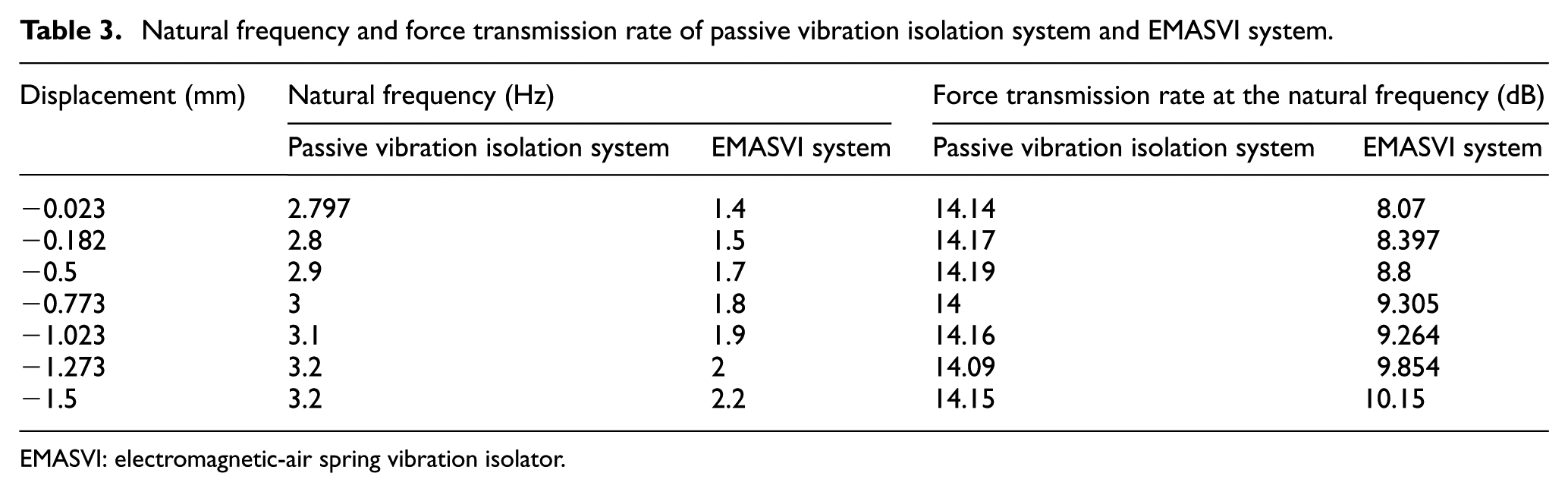
As for the model of vibration isolation system shown in Figure 6, taking sweep signal as an excitation force, frequency is set to be 0.1–100 Hz, and the amplify of excitation force is 5 KN; the simulation time is 10 s; and the control block diagram of EMASVI system is as shown in Figure 7. When the stiffness of MSVI is −1.125 × 106 N/m, and that of air spring is different from this number, the natural frequency of passive vibration isolation system and EMASVI system, as well as the force transmission rate at the natural frequency are worked out as shown in Table 3.

Control block diagram of sweep signal.
Natural frequency and force transmission rate of passive vibration isolation system and EMASVI system.
EMASVI: electromagnetic-air spring vibration isolator.
From Table 3, a conclusion can be acquired that with the increase in the stiffness of air spring, compared to passive vibration isolation system, the natural frequency and the force transmission rate of EMASVI system reduces, and the extent of the decrease tends to decline gradually. Therefore, under the premise of satisfying the loading capacity, the stiffness of designed air spring can be properly reduced.
When the stiffness of air spring is 1.545 × 106 N/m, the natural frequency of passive isolation system is 2.797 Hz, and the force transmission rate at the natural frequency is 14.14 dB. With the change of magnetic suspension isolator’s displacement stiffness, the natural frequency and force transmission rate of EMASVI system can be seen in Table 4.
Natural frequency and force transmission rate in this natural frequency of EMASVI system.

EMASVI: electromagnetic-air spring vibration isolator.
As Table 4 shows, the natural frequency of EMASVI system is always lower than that of the passive isolation system. As the absolute value of magnetic suspension isolator’s displacement stiffness decreases, the natural frequency of EMASVI system shows no sign of changing, and the main reason is that the varying range of the magnetic suspension isolator’s displacement stiffness is small, and this has little influence on the natural frequency of EMASVI system. When the absolute value of magnetic suspension isolator’s displacement stiffness reduces 3.6% (from 1.15 to 1.11), the force transmission rate at the natural frequency increases 0.41 dB (from 7.76 to 8.17), that is, the performance of vibration isolation is deteriorated. Therefore, when the magnetic suspension isolator is designed, the absolute value of its displacement stiffness should be increased within acceptable limit.
Conclusion
In view of the existing structural shortcomings of hybrid vibration isolator, an EMASVI was developed according to the advantages of electromagnetic actuator and air spring. The structure proposed in this article is characterized with large bearing capacity, compact structure, low inherent frequency, and controllable and adjustable stiffness. The stiffness of EMASVI system can be adjusted by changing the bias current in coil.
A dynamic model of the EMASVI system and an expression of the force transmission are established in the article. The example of vibration isolation system shows that the electromagnetic actuator has variable negative stiffness, which can decrease the natural frequency of the EMASVI and broaden the scope of low-frequency vibration isolation. In addition, low-frequency vibration isolation performance of the system can be improved.
The calculation and simulation analysis of the example demonstrate that in the condition of satisfying the loading capacity the increase in magnetic suspension isolator’s displacement stiffness and the decrease in air spring’s stiffness can improve the performance of vibration isolation. The conclusion is useful for the improvement of dynamic performance of the vibration system in engineering.
Footnotes
Academic Editor: Balla Prasad
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the National Natural Science Foundation of China (Project Nos 51275368 and 51205296).