The problem of exponential stability and L1-gain performance is solved for continuous-time delayed switched positive singular systems. First, a necessary and sufficient condition of positivity is established for the system via the singular value decomposition approach. Then, based on the co-positive Lyapunov function tool, we develop a sufficient condition for the switched positive singular system to be exponentially stable and meet a prescribed L1-gain performance. Based on this condition, the optimal system performance level can be determined by solving a convex optimization problem. All the obtained conditions are in linear programming form, which suggests a good scalability and applicability to high-dimensional systems. Finally, a numerical example is given to illustrate the applicability of the obtained results.
We study the stability as well as system performance for switched positive singular systems (SPSSs) in this article. Our motivations come from the following aspects. First, many systems in practical consist of non-negative variables like level of population, mass density, and absolute temperature, which are known as positive systems1,2 and can be applied in many fields like, pharmacokinetics,3 hydraulic systems,4–7 chemical reaction,8,9 and Internet congestion control.10 Second, many practical systems such as power systems, economics systems, robotic systems, and biological systems11–14 can be modeled as singular systems, which have much more advantages than the general state-space model,15 and much attention have been received on analysis for singular systems.16,17 Third, many systems often go through abrupt variations in their structures and parameters in practice; one effective method of characterizing the sudden changes is the switched system method.18–21
For positive systems, L1-norm is usually used as a performance measure because it accounts for the sum of the quantities.22 Recently, there have been many important results for positive systems via the linear co-positive Lyapunov functional approach,23–25 and the corresponding existence conditions are formulated in the linear programming (LP) form. When positive singular systems experience the switching-type changes in their parameters, SPSSs consisting of a family of linear positive singular systems and a switching signal can be modeled. For an SPSS, it is an area that is only beginning to be investigated, and there is further room for investigation. It should be pointed out that the analysis would be of theoretical challenges, since one needs to consider the coupling between the switching, the algebraic constraints in singular models, and the positivity limits in valuables.
Recently, some results on positive singular systems have been obtained.26–28 As pointed out in Zhang et al.,26 the internal positivity property of continuous descriptor systems is studied. In Phat and Sau,28 the problems of positivity and stability are addressed for discrete-time positive singular systems with time delay. It is widely recognized that few of them analyze the exponential stability for positive singular systems. The main difficulty is how to determine the exponential decay rate; the first problem to be solved is to determine the decay rate for positive singular systems via some effective approaches.
There are only a few recent publications investigating SPSSs.29,30 Xia et al.29 dealt with the controller design problem for positive singular Markovian jump systems. In Qi and Gao,30 the stability problems for positive switched singular systems were investigated using the average dwell time approach. However, both the studies29,30 only focused on the autonomous case without considering time delay and exogenous disturbance, which are frequently encountered in practice, and much attention has been received on analysis of systems with those two phenomena.22,31,32 Thus, it becomes significant to investigate non-autonomous SPSSs with those two phenomena. When considering time delays and exogenous disturbances, the main difficulties are how to choose an appropriate Lyapunov function, and how to analyze the stability and system performance, since it becomes more challenging and complicated. To the best of the authors’ knowledge, this kind of system has not been studied up to date. Therefore, we are interested in investigating the exponential stability, the optimal L1-gain performance for SPSSs with time-varying delay in this article.
The main contributions of this work are as follows: (1) provide a necessary and sufficient condition of positivity for delayed SPSSs via the singular value decomposition approach, (2) identify the switching signals via average dwell time approach to ensure the exponential stability of the system, (3) derive a sufficient delay-dependent condition for the first time for the system to be exponentially stable as well as satisfy a prescribed L1-gain performance using the co-positive Lyapunov function tool, (4) propose a convex optimization problem for delayed SPSSs such that the optimal L1-gain performance level can be determined, and (5) present all criteria obtained in LP form.
The remainder is as follows. The preliminaries and problem formulation are given in section “Problem formulation.” The positivity, exponential stability, and L1-gain performance are analyzed in section “Exponential stability and L1-gain performance analysis.” Section “Numerical results” provides a numerical example to illustrate the effectiveness of proposed method. Concluding remarks are given in section “Conclusion.”
Notations
denotes that all the entries of A are non-negative (non-positive, positive, and negative); denotes that ; is the transpose of A; is the determinant of A; represents the degree of a polynomial; denotes the rank of A; denotes the collection consisting of all real (positive real) numbers; is the space of all n-dimensional real (positive real) vector; is the collection consisting of all m ×n -dimensional real matrices; denotes a column vector in which each entry is 1; means the entry of a matrix A; and means the entry of a vector x. is the 1-norm of a vector , is the 1-norm of a matrix . is the L1-norm of a vector-valued function , . For any , and stand for the maximal and minimal element of , respectively.
Problem formulation
Consider the following continuous-time delayed switched singular system
where denotes the state, is the disturbance input which belongs to , and is the controlled output. is a time-varying delay, which is assumed to satisfy and . is a given continuous vector-valued initial condition of the system. is a switching signal taking values in a finite set with N being the number of subsystems; moreover, denotes that the subsystem is activated, . Meanwhile, for switching time sequence of the switching signal , the holding time between is called the dwell time of the currently engaged subsystem, where l is a non-negative integer. are known constant matrices with appropriate dimensions. is singular and . Without losing generality, System (1) is assumed to be activated at .
Exponentially stable, if for any switching signal and any initial conditions , of System (1) with satisfies , , where , and are called the decay rate and decay efficient, respectively.
Remark 1
As in Zhang et al.26 and De La Sen,35 the time delay switched singular System (1) may have an impulsive solution. However, the regularity and causality of System (1) can guarantee the existence and uniqueness of the system’s solution for any given initial conditions.
Definition 2
System (1) is said to be positive if, for any initial conditions , and any switching signals , we have and for all .1
Lemma 1
Let . Then, for if and only if A is a Metzler matrix.1
For System (1), since , then there exist non-singular matrices P, such that . In this article, for simplicity, let and other system matrices have the following form,
Lemma 2
System (1) with (2) is causal if and only if is non-singular, .12
In light of Lemma 2, when System (1) with (2) is regular and causal, under the coordinate transformation , , , System (1) can be rewritten as
Assume that , , is regular and causal, then System (1) with (2) is positive if and only if System (3) is positive.28
Definition 3
For and , System (1) has a prescribed L1-gain performance if a switching signal exists, such that the following conditions occur:24,36
When , System (1) is regular, causal, and exponentially stable;
Under , , we have
Definition 4
For the switching signal and any , let denote the number of switches of over the interval . For given and , if the inequality19
holds, then the positive constant is called the average dwell time, and is called the chattering bound. As commonly used in the literature, we choose .
The problem to be addressed in this article can be formulated as follows:
Provide a necessary and sufficient condition of the positivity for System (1);
Develop a sufficient delay-dependent LP condition and identify a class of switching signals , such that System (1) is exponentially stable and meets a prescribed L1-gain performance level;
Propose a convex optimization problem for System (1), such that the optimal L1-gain performance level can be determined.
Exponential stability and L1-gain performance analysis
In this section, we aim at investigating the exponential stability and L1-gain performance of the continuous-time SPSS (equation (1)). First, a necessary and sufficient condition for the positivity of System (1) is presented in the following theorem.
Theorem 1
Assume that , , is regular and causal. System (1) is positive if and only if is a Metzler matrix, , , , , , , , , , , , where , , , , , , , , , and are defined as in equation (3).
Proof: Sufficiency
We will show that System (1) is positive. For and , we obviously have from the initial condition , , such that .
For any and , we denote the switching instances on the interval . First, we prove that the solution is positive on . It follows from Lagrange’s formula and System (3) that
By integrating both sides of equation (6) from , it holds that
By Lemma 2 and Theorem 1, if is a Metzler matrix, , , , , , , , , , and , it is straightforward to obtain , , , , and from equation (10). Now, similar to the aforementioned processes, one can have that
and . Recursively, if is a Metzler matrix, , , , , , , , , , and , , we can obtain that , , , .
Necessity
Conversely, we first suppose that there exists an element , , , where is the scalar entry of . From System (3), we have
where , , and represent the element of , , and , respectively. Then, if , we can see that is possible whenever , , and , which means that . It follows that System (1) is not positive. Second, further assume that has an element , , we have
Then, it can be obtained that is possible whenever , , and ; that is, System (1) is not positive. Similarly, if has an element , or has an element , one can get that System (1) is not positive.
Continuously, suppose that there exists an element , , , where is the scalar entry of . From System (3), we obtain
Then, if , we can see that is possible whenever , and . It follows that System (1) is not positive. Similarly, if has an element , or has an element , or has an element , , one can get that System (1) is not positive.
Finally, suppose that there exists an element , , , where is the scalar entry of . From System (3), we obtain
Then, if , we can see that is possible whenever , , and . It follows that System (1) is not positive. Similarly, if has an element , or has an element , , one can get that System (1) is not positive.
That is to say, System (1) is positive under arbitrary switching signals if and only if is a Metzler matrix, , , , , , , , , , , .
This completes the proof.
Remark 2
When , positivity condition for positive switched non-singular systems has been proposed in Shen and Lam;22 that is, System (1) with is positive if and only if is a Metzler matrix, , , , , .
In the sequence, by applying the average dwell time approach and the co-positive Lyapunov function technique, a sufficient condition for exponential stability with an L1-gain performance of System (1) is proposed.
Theorem 2
Suppose that , , is regular and causal. Let and be prescribed scalars, is a Metzler matrix, , , , , , , , , , , if , and there exist vectors , , , , such that
then, System (1) is positive and exponentially stable with its decay rate estimate and achieves a prescribed L1-gain performance level for any switching signal with average dwell time
where satisfies
Proof
First, we prove that System (1) with is exponentially stable. Choose the following co-positive Lyapunov function
where and . Therefore, from the average dwell time condition , one can readily obtain , which means that is exponentially stable with decay rate . Moreover, it is easy to obtain from equation (25) that
In the next equation, the second component solution will be proven to be stable with the same exponential decay rate . Denote that . Observe that if , then
Thus, when , , through the inductive supposition method, and we have from equations (32) and (33) that
If , by induction, we obtain
From equations (25) and (34), we finally have , , ; thus, we conclude that System (3) with is exponentially stable with decay rate , which infers that System (1) with is exponentially stable with decay rate .
Next the L1-gain performance will be considered. Noticing equations (11)–(13), we have
where .
Then, it follows
From equations (15) and (16), at the switching instant , we can easily obtain
Integrating both sides of equation (41) from to leads to inequality
This completes the proof.
Remark 3
When no parameters switches or jump occurs in System (1), one can obtain the corresponding sufficient condition that guarantees the exponential stability of the system by removing equation (15). In this case, the decay rate is only related to , which can be tuned according to practical applications.
Remark 4
From Theorem 2, one can see that the minimal average dwell time is determined by the scalars and . One can choose different and to have different if equations (11)–(15) hold. In addition, when in equation (14), which leads to , , , , , and , then, System (1) possesses a common Lyapunov function, and switching signals can be arbitrary.
When , the results on exponential stability and L1-gain performance analysis for positive switched non-singular system can be obtained easily from Theorem 2.
Corollary 1
Let and be prescribed scalars, is a Metzler matrix, , , , , if there exist vectors , , , , such that
then, System (1) with is positive and exponentially stable with its decay rate estimate and achieves a prescribed L1-gain performance level for any switching signal with average dwell time (equation (14)).
Problem 1
The exponential stability and L1-gain performance can be analyzed by solving feasibility problem of LPs (equations (11)–(15)) in Theorem 2. Similarly, for given , , and , the optimal L1-gain performance level can be determined by solving the following convex optimization problem
Numerical results
In this section, we give an example to show the validity of our theoretical results.
Example 1
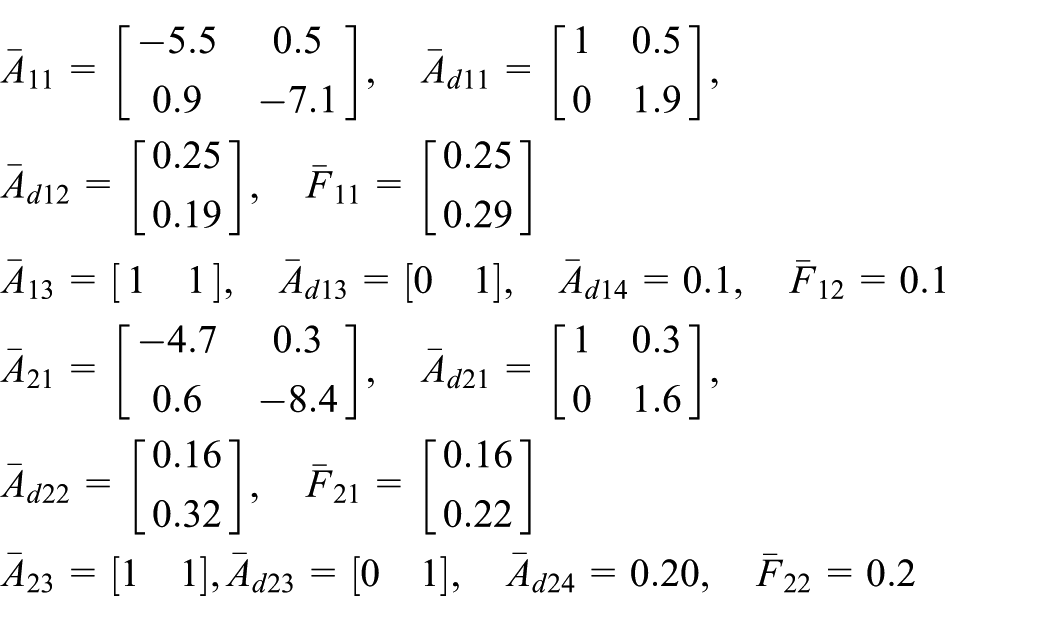
Consider System (1) with two modes, that is, , and
Direct calculation shows that
Thus, the switched singular System (1) is said to be regular and casual. Furthermore, by simple computation, we obtain
Therefore, by Theorem 1, System (1) is positive.
Let , , solve the optimization Problem 1, we have , the corresponding solutions are as follows
By analysis, it can be found that the allowable minimum of is when is fixed; in this case, . One can also get the decay rate as with and . Thus, according to Theorem 2, we can conclude that System (1) is exponentially stable with an optimal L1-gain performance level for any switching signal satisfying .
The simulation results are shown in Figures 1–3, where the initial condition is , , , and the disturbance is . The switching signal is showed in Figure 1; Figures 2–3 plot x and z of the system over 0–25 s under the switching signal, respectively. It is easy to see that System (1) is positive and exponentially stable. This demonstrates the proposed results.
Switching signal.
The state of the given system.
The output of the given system.
Conclusion
The problem of exponential stability and L1-gain performance analysis for continuous-time delayed SPSSs has been solved in this article. First, a necessary and sufficient condition for the positivity of this system has been derived via the singular value decomposition method. Then, a condition has been derived to solve the problem of exponential stability and L1-gain performance analysis. The decay rate estimation has been derived, and the optimal system performance level can be determined by solving a convex optimization problem. Finally, a numerical example is provided to demonstrate the effectiveness of the obtained results.
Footnotes
Academic Editor: Nasim Ullah
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under grant nos 61502522, 61502534, 61472442 and 61472443.
References
1.
FarinaLRinaldiS.Positive linear systems. New York: Wiley, 2000.
2.
KaczorekT.Positive 1D and 2D systems. Berlin: Springer-Verlag, 2002.
3.
SandbergI.On the mathematical foundations of compartmental analysis in biology and medicine, and ecology. IEEE T Circuits Syst1978; 25: 273–279.
4.
YaoJDengWJiaoZ.Adaptive control of hydraulic actuators with LuGre model based friction compensation. IEEE T Ind Electron2015; 62: 6469–6477.
5.
YaoJJiaoZMaD.A practical nonlinear adaptive control of hydraulic servomechanisms with periodic-like disturbances. IEEE/ASME T Mech2015; 20: 2752–2760.
6.
YaoJJiaoZMaD. High-accuracy tracking control of hydraulic rotary actuators with modelling uncertainties. IEEE/ASME T Mech2014; 19: 633–641.
7.
YaoJJiaoZMaD.Extended-state-observer-based output feedback nonlinear robust control of hydraulic systems with backstepping. IEEE T Ind Electron2014; 61: 6285–6293.
8.
Silva-NavarroGAlvarez-GallegosJ.Sign and stability of equilibria in quasi-monotone positive nonlinear systems. IEEE T Automat Contr1997; 42: 403–407.
9.
SunWGaoHKaynakO.Vibration isolation for active suspensions with performance constraints and actuator saturation. IEEE/ASME T Mech2015; 20: 675–683.
10.
ShortenRWirthFLeithD.A positive systems model of TCP-like congestion control: asymptotic results. IEEE/ACM T Network2006; 14: 616–629.
11.
HerreroARamirezAThomeN.An algorithm to check the nonnegativity of singular systems. Appl Math Comput2007; 189: 355–365.
12.
XuSLamJ.Robust control and filtering of singular systems. Berlin: Springer, 2006.
13.
XuSLamJZouY.An improved characterization of bounded realness for singular delay systems and its applications. Int J Robust Nonlin2008; 18: 263–277.
14.
FuMWangSCongY.Swarm stability analysis of high-order linear time-invariant singular multiagent systems. Math Probl Eng2013; 2013: 469747-1–469747-11.
15.
DaiL.Singular control systems. Berlin: Springer, 1989.
16.
HuZZhuHZhaoJ.Further results on H∞ filtering for a class of discrete-time singular systems with interval time-varying delay. Circ Syst Signal Pr2013; 32: 1081–1095.
17.
ZhaoJZhangLQiX.A necessary and sufficient condition for stabilization of switched descriptor time-delay systems under arbitrary switching. Asian J Control2016; 18: 266–272.
18.
LiberzonD.Switching in systems and control. Boston, MA: Birkhauser, 2003.
19.
SunZGeS.Switched linear systems: control and design. New York: Springer, 2005.
20.
WangDWangWShiP. Controller failure analysis for systems with interval time-varying delay: a switched method. Circ Syst Signal Pr2009; 28: 389–407.
21.
LiSXiangZ.Stability and L∞-gain analysis for positive switched systems with time-varying delay under state-dependent switching. Circuits Syst Signal Pr. Epub ahead of print 13 June 2015. DOI: 10.1007/s00034-015-0099-0.
22.
ShenJLamJ.On l∞ and L∞ gains for positive systems with bounded time-varying delays. Int J Syst Sci2015; 46: 1953–1960
23.
FornasiniEValcherM.Stability and stabilizability criteria for discrete-time positive switched systems. IEEE T Automat Contr2012; 57: 1208–1221.
24.
LiSXiangZKarimiH.Stability and L1-gain controller design for positive switched systems with mixed time-varying delays. Appl Math Comput2013; 222: 507–518.
25.
ZhaoXZhangLShiP.Stability of a class of switched positive linear time-delay systems. Int J Robust Nonlin2013; 23: 578–589.
26.
ZhangYZhangQTanakaT. Internal positivity analysis for continuous descriptor systems with time delays. In: 32 Chinese control conference, Xian, China, 26–28 July 2013, pp.285–290. New York: IEEE.
27.
LiuXWangLYuW. Constrained control of positive discrete-time systems with delays. IEEE T Circuits: II2008; 55: 193–197.
28.
PhatVSauN.On exponential stability of linear singular positive delayed systems. Appl Math Lett2014; 38: 67–72.
29.
XiaBLianJYuanX.Stability of switched positive descriptor systems with average dwell time switching. J Shanghai Jiaotong Univ2015; 20: 177–184.
30.
QiWGaoX.State feedback controller design for singular positive Markovian jump systems with partly known transition rates. Appl Math Lett2015; 46: 111–116.
31.
QiWGaoX.L1 control for positive Markovian jump systems with time-varying delays and partly known transition rates. Circ Syst Signal Pr2015; 34: 2711–2726.
32.
ShenJLamJ.L∞-gain analysis for positive systems with distributed delays. Automatica2014; 50: 175–179.
ZhangDYuLWangQ. Exponential H∞ filtering for discrete-time switched singular systems with time-varying delays. J Frankl Inst2012; 349: 2323–2342.
35.
De LaSen M.On positivity and stability of a class of time-delay systems. Nonlinear Anal: Real2007; 8: 749–768.
36.
ChenXLamJLiP. Controller synthesis for positive systems under L1-induced performance. In: 24th Chinese control and decision conference, Taiyuan, China, 23–25 May 2012, pp.92–97. New York: IEEE.