
Abstract
A Y-type urban rail transit is composed of a trunk and a branch, and the passenger demand has the characteristics of multidirectional and unbalanced. It is important to design routing planning of Y-type urban rail transit and provide reasonable service for passengers with acceptable operational cost. In this study, a routing planning design model was proposed for Y-type urban rail transit aimed at minimizing the passenger travel time and train operating distance. The decision variables of the model were the locations of turn-backs and the departure frequencies of the train routings in the multi-routing planning. The constraints of passenger demand and line condition were considered. The multi-objective model was turned into a single-objective model by giving weight values to the objectives. Then a genetic algorithm was applied to obtain optimal solutions of the proposed model. Finally, a case study was conducted, and the optimal solutions under different forms of multi-routing planning with different weight values were analyzed. The results showed that when the weight of the passenger travel time increased to a certain level, the optimal solution changed from a two-routing planning to a three-routing planning, and the latter one could better meet the characteristics of the passenger.
Introduction
Y-type lines are those lines starting as heavily traveled trunk lines from the city center outward and then dividing into a greater number of lines with lower loads serving large, often low-density areas. 1 Y-type lines can attract more passengers to increase profit by expanding service areas, so the adoption of multi-routing mode may make the train routing planning better satisfy the multidirectional and unbalanced characteristics of passenger demand. There are many Y-type urban rail transit lines in operation such as Paris Line RER-A, Munich Metro Line 3 and Line 6, Guangzhou Metro Line 3, Beijing Subway Line Yanfang, and Hangzhou Metro Line 1.
Designing train planning of Y-type urban rail transit is to determine the locations of turn-backs and frequencies of the train routings subject to passenger demand and line condition. There exists much research on multi-routing planning in the field of urban public transport and railway; Furth 2 and Furth and Day 3 propose methods on designing routing planning subject to a certain scale of vehicles and a balanced load factor, and propose the conception “schedule mode” which is the rate of the routings’ departure frequencies to cope with cyclical diagram; Ceder and colleagues4–6 propose a multi-routing planning model aimed at minimizing the number of vehicles and the number of short-turn trips, and a strategy which combines short-turning, holding, and stop-skipping to reduce the passenger travel time and passenger transfers; Vijayaraghavan and Anantharamaiah 7 propose to insert deadhead trips to meet passenger demand and reduce the number of vehicles; Tirachini and colleagues8,9 and Site and Filippi 10 propose a strategy combining short-turn and expressing to analyze the effects of departure frequencies, vehicle sizes, and turn-back stations on passengers and operator when the arrival of buses follows uniform distribution, and also Site and Filippi 10 study the situation when the arrival of buses follows Poisson’s distribution; Canca et al. 11 propose a short-turn strategy to solve disruptions caused by heavy demand, aimed at diminishing passenger waiting time while preserving the quality of service; Jannson 12 optimizes the departure frequency and vehicle size to reduce passenger travel cost and operator cost; Chen et al. 13 design an algorithm which can adjust train operation based on ordinary optimization and took a heavy haul railway as an example to prove that the solution can well satisfy the passenger demand.
However, the studies mentioned mainly focus on single lines, whose passengers do not need to transfer because all demands can be covered by the full-length routing which covers all the stations. However, the passenger demand of a Y-type line cannot be satisfied by a full-length routing, especially when the line connects the city center with the suburbs, so there exist some passengers who need to transfer. Also, the departure frequencies of the routings on the trunk line and the branch line are subject to the tracking interval because of the routings’ joint operation, which means different kinds of services operate on the same line. Therefore, the existing studies on single lines are not suitable for a Y-type line. The routing planning of Y-type line has been studied by a limited number of authors, and the studies mainly focus on designing the trunk line and branch line, 14 proposing the variants of routing planning by qualitative description 15 and optimizing the vehicle circulation under a certain routing planning. 16
In summary, the studies on multi-routing planning did not consider the characteristics of Y-type line, and the studies on Y-type lines did not consider the influence of the departure frequencies and the turn-back stations. Thus, this article proposed a multi-routing planning model aimed at minimizing the passenger travel time and operator cost. Then the optimal solutions under different weights of passenger travel cost were obtained, and the influence of different types of routing planning on the passengers and the operator was discussed.
Description of the problem
Y-type line is usually composed of a trunk line and a branch line connected by a node station shown in Figure 1, in which O is the node station, AOB is the trunk line (named Trunk), and OC is the branch line (named Branch). Usually, the passenger flow of the trunk is larger than that of the branch.

Components of Y-type line.
The typical forms of multi-routing planning of Y-type line include separate operation, straight-through operation, and integrated operation which is a combination of the previous two forms. There are three combinations under two-routing planning, as shown in Figure 2(a)–(c). However, the combinations under three-routing planning are related to the relationships of the turn-backs of different routings. Thus, the combinations are numerous and several combinations are shown in Figure 2(d)–(f) because of the limitation of space.

Typical multi-routing planning of Y-type line: (a) separate operation, (b) straight-through operation, (c) integrated operation under two-routing, (d) integrated operation 1 under three-routing, (e) integrated operation 2 under three-routing, and (f) integrated operation 3 under three-routing.
A routing planning with two routings is called two-routing planning, such as Figure 2(a)–(c); a routing planning with three routings is called three-routing planning, such as Figure 2(d)–(f). Most of the cases in use adopt a two-routing planning because the operation is not as complex as three-routing planning, but the diversity of three-routing planning may make it better meet the complex and unbalanced passenger demand, which may bring some additional profit to the passengers or the operator. Therefore, this article studied multi-routing planning of Y-type urban rail transit. The variables are the departure frequencies and the turn-back stations of the routings under the constraints of passenger demand and line condition, aiming at minimizing the passenger travel time and operator cost.
The article is organized as follows: sections “Description of the problem” and “Modeling” describe the problem and the modeling, respectively; section “Solution algorithm” describes the algorithm; section “Case study” studies on a case and section “Conclusion” concludes the article.
Modeling
The typical multi-routing planning of two-routing and three-routing are shown in Figures 3 and 4, respectively.

Routing planning of two-routing.

Routing planning of three-routing.
The routing covering all the stations on the trunk AOB is the trunk routing, called Routing 1; the routing covering the branch OC is the branch routing, called Routing 2. Routing 2 may covers some stations on AO, too; if there are three routings, the third one is a minor routing, called Routing 3. Therefore, Routing h is used to represent the routings, and h (h = 1, 2, 3) is the order number of the routing. The turn-back stations of Routing 1 are L1 and Lm; the turn-back stations of Routing 2 are Lx and Ln; the turn-back stations of Routing 3 are Ly and Lz, and the departure frequency of Routing h is fh (h = 1, 2, 3).
When f3 ≠ 0, the planning is three-routing; when f3 = 0, the planning is two-routing, and the planning is separate operation when Lx = Lb while straight-through operation when Lx = L1, so the routing planning in Figure 4 can contain the variants shown in Figure 2. The major variables, parameters, and notations used in this article are shown in Tables 1–3, respectively.
Variables and definitions.

Parameters and definitions.

Notations and definitions.

The multi-routing planning of Y-type line is complex, so the following assumptions were used to simplify the problem:
The passenger flow of the trunk is usually larger than the branch, which is easier to show the characteristic of unbalanced. Thus, the minor routing (Routing 3) was assumed on the trunk line if it existed.
Passengers would not choose routings with transfers unless they had to.
The trains’ formation was fixed.
The arrival of passengers was assumed to follow uniform distribution under large passenger flow with short intervals.
Passengers boarded and alighted at the stations simultaneously, and the boarding process was slower. Thus, the stop time of a train at each station was assumed to be equal to the boarding time with an upper limit and a lower limit.
Considering the saturated capacity of a subway at the peak hour, the departure frequencies of different routings were assumed to have multiple relationships with each other, which could ensure balanced headways under a certain level of service.
The designing of routing planning affects the service quality for the passengers and the operational cost of the operator. Therefore, this article proposed a model considering both the travel time of the passengers and the operating distance of the trains to represent service quality and operational cost. Also, the constraints such as turn-back tracks of stations, transport capacity and passenger demand, and tracking interval were considered. Finally, the optimal solutions of routing planning were obtained.
Passenger travel time
The passenger travel time was composed of waiting time, in-vehicle time, and transfer time. Waiting time was the product of passenger flow and average waiting time; in-vehicle time was the product of passenger flow and section running time, station stop time; transfer time was the product of transfer passenger flow and average transfer time. The passenger travel time is expressed as follows

In which Z1 is the passenger travel time (s), CW is the passenger waiting time (s), CV is the passenger in-vehicle time (s), and CT is the passenger transfer time (s).
Waiting time
The location of a station determines the service frequencies for the passengers at the station, for example, in Figure 3, Stations L1−Lx and Lb−Lm are only covered by Routing 1, Stations Lb−Ln are only covered by Routing 2, and Stations Lx−Lb are covered by both routings. For ease of expression, the Y-type line is divided into at most six passenger segments shown in Figure 5 according to the location of turn-back stations, and this way of division can cover other situations, such as when Lx = Lb, it would be separate operation, and Segment 2 no longer exists; when Lx = L1, it would be straight-through operation, and Segment 1 no longer exists. The passenger flow from Segment 1 to Segment 2 is expressed as
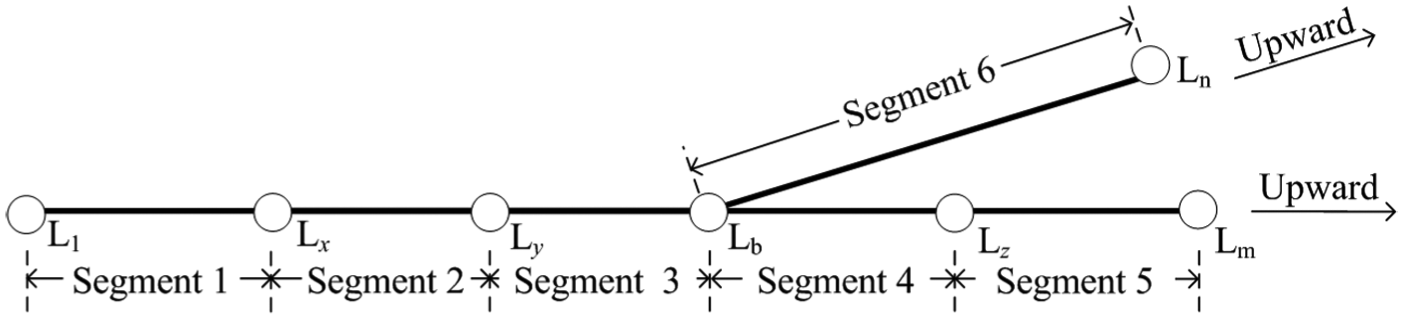
Segments divided by turn-back stations.
A passenger’s choice for the routings is dependent on his or her OD (origin station and destination station), such as passengers from Segment 1 to Segment 6 in Figure 5 need to transfer from Routing 1 to Routing 2, while passengers from Segment 2 to Segment 6 only need to catch Routing 2. According to Assumption 2, passengers were divided into groups named Pg: P1 needed to catch Routing 1; P2 needed to catch Routing 2; P3 could catch Routing 1 or Routing 2; P4 could catch Routing 1 or Routing3; P5 could catch Routing 1, Routing 2, or Routing 3. In this section, the waiting time of the passengers who need to transfer only accounts for the waiting time for the first routing they catch, and the waiting time for the routing after transferring would be calculated in section “Tranfer time”. Thus, the expressions of Pg are as follows





According to Assumption 3, the average waiting time could be calculated as half of the headway, 9 which was the interval between two successive trains. Thus, passenger waiting time was calculated as follows


In which
In-vehicle time
The in-vehicle time was composed of running time between the stations and passengers’ waiting time when the train stopped at the stations. The former was the product of the sections’ running time and the sections’ passenger flow, and the latter was the product of the passenger flow passing the stations and trains’ stop time at the stations. 17 According to Assumption 4, the stop time at the stations was related to the number of passengers boarding with an upper limit and a lower limit, and the passengers boarding a train was related to passenger flow, share rate, and departure frequencies of the routings. The in-vehicle time after transferring of the transfer passengers is calculated in the same way. The passengers were assumed to have the same choice ratio for each gate. Therefore, the passenger in-vehicle time was expressed as follows



In which ti,j is the running time from Stations Li to Lj (s);
Transfer time
The passenger transfer time was composed of walking time and waiting time for transferring which could be calculated approximately by half of the aimed routing’s headway, so the passenger transfer time could be calculated as follows

In which to is the average walking time for transferring (s).
Train operating distance
Suppose the vehicles were sufficient, the operating distance could stand for the operator cost which was expressed as follows. The train operating distance was the product of the departure frequencies and the distance of the routes, and the latter one was related to the locations of turn-backs. It should be noted that the deadheading of the trains from the depot to the nearer turn-back stations of the routings was quite small compared to the operating distance of the trains, so the deadheading distance was ignored

In which Z2 is the trains’ operating distance (km); Rh is one trip’s operating distance of Routing h (km).
Multi-objective model
As the passenger travel time and train operating distance have different unites of measurement, they could be transformed into standard values by formula (10) to be nondimensional. Then the objectives were given weighted values to turn the model into a single-objective model 18 by formula (9)


Formulas (1)–(7)







Solution algorithm
The proposed model involved a complicated mixed-integer nonlinear programming problem, so the optimal solutions could not be easily obtained by adopting polynomial algorithms when the scale of Y-type line expanded. However, genetic algorithm (GA) is suitable for solving multivariable complex problems with multiple parameters, and it is widely applied in solving routing planning problems due to its extensive generality, strong robustness, high efficiency, and practical applicability. Therefore, this study adopted GA to solve the problem, and the key steps were designed as follows:
1. Chromosome encoding. In this study, 0–1 binary encoding was used. The genes for chromosomes in GA were the decision variables of the model, including order number of the unknown turn-back stations of Routing 2 (Lx), the unknown turn-back stations of Routing 3 (Ly and Lz), and the departure frequencies (f1, f2, f3) of the routings. Considering the maximum frequency is 30 train/h, the number of genes for the frequency of a routing was set to be five. The number of stations on the trunk line is usually less than 30, so the number of genes for the order number of a turn-back station was set to be five. Thus, the expression of a chromosome is shown in Figure 6.
2. Chromosome decoding. The chromosomes of turn-back stations and departure frequencies were decoded into real solutions. This step was repeated until the solution satisfied all constraints including formulas (11)–(17) and re-encoded the real solution to 0–1.
3. Fitness calculation. It was necessary to transform the objective formula (9) into a maximization problem since the GA was designed to solve maximization problems. Given a certain weight value chosen from [0, 1.0] in the model, as the maximum value of the objective is 1.0, the fitness function was equal to 1.0 minus the chromosome’ objective Z, expressed as follows

In which X is the order number of the chromosome in the population, and Z(X) is the objective of the chromosome calculated by formula (9).
4. Crossover and mutation operations. Two chromosomes with the largest fitness were recorded to operate single-point crossover and single-point mutation. The optimal solutions under two-routing and three-routing were obtained under the certain weight value. The algorithm won’t terminate until all the optimal solutions under each weight value have been obtained; otherwise, record them and recalculate with a new weight value again.

Expression of chromosomes.
Other detailed steps or approaches of GA were similar to the standard GA.
Case study
Figure 7 shows the layout of a Y-type urban rail transit line. The node station is

Layout of an urban rail transit line.
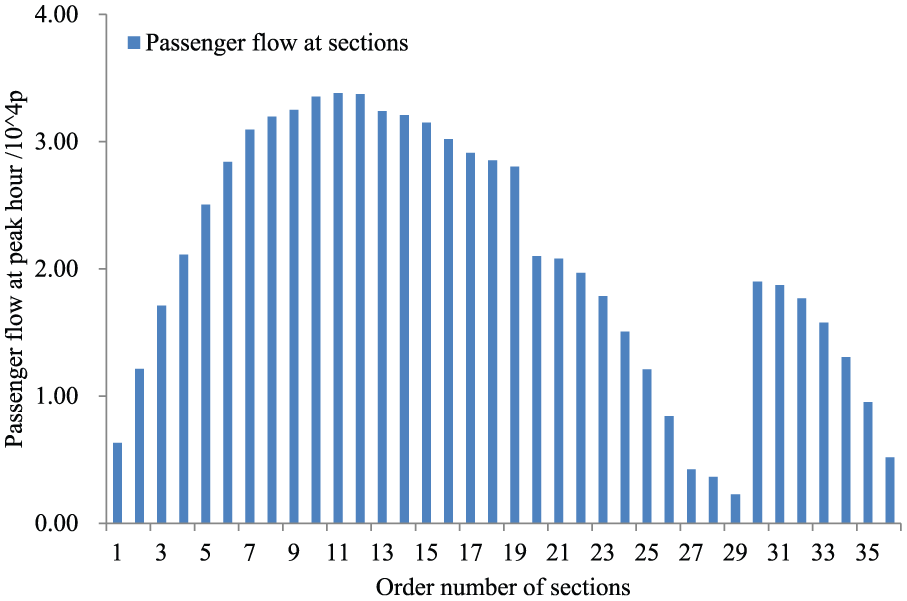
Passenger flow of each section in morning peak hour (7:30–8:30 a.m.).
Value of parameters.

Result analysis
According to the proposed model, the weight value of the passenger travel time and the form of multi-routing planning affected the optimal solutions. Thus, this article calculated the optimal solutions under the form of three-routing and two-routing, respectively, with the weight increased from 0 to 1.0. The results are shown in Tables 5 and 6, and the forms of the routing planning are shown in Figures 9 and 10.
Optimal solutions of three-routing planning with different weight values.

Optimal solutions of two-routing planning with different weight values.


Optimal solution of three-routing planning: (a) ϕ = 0–0.1, (b) ϕ = 0.2, (c) ϕ = 0.3–0.5, and (d) ϕ = 0.4–1.0.
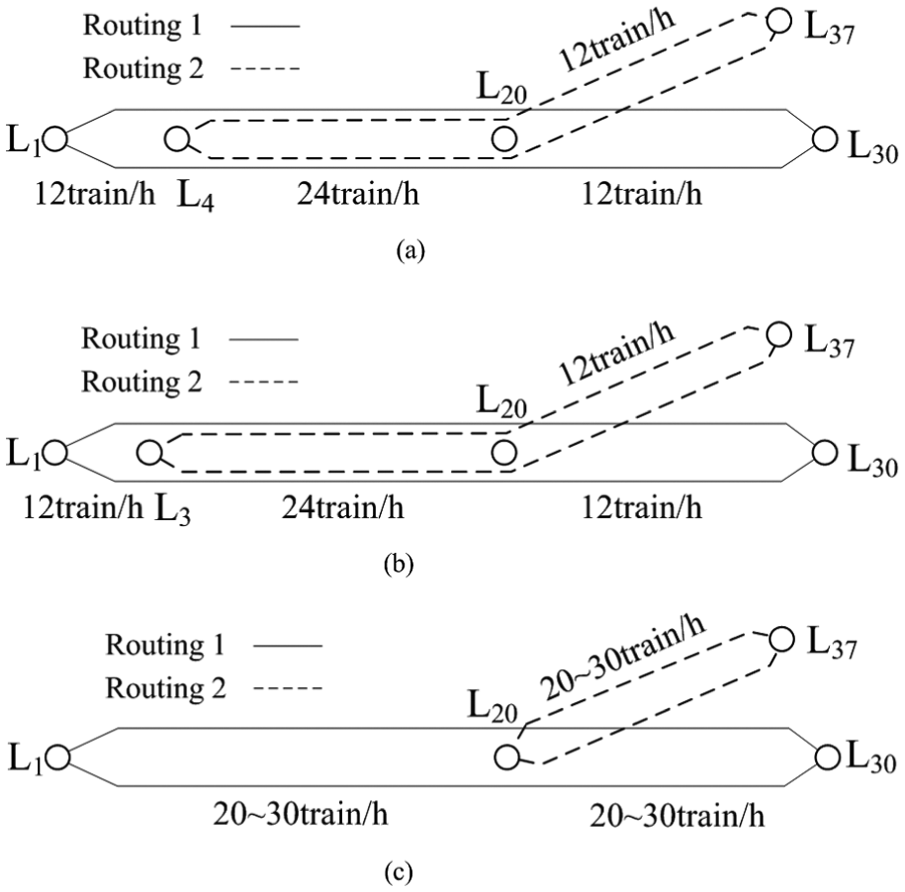
Optimal solution of two-routing planning: (a) ϕ = 0, (b) ϕ = 0.1–0.4, and (c) ϕ = 0.5–1.0.
Figure 9 shows that when the weight of the passenger travel time
Figure 10 shows that when the weight of the passenger travel time
Comparison of three-routing planning and two-routing planning
To discuss the influence of different routing planning and weight values on the objectives, passenger travel time (Z1) and train operating distance (Z2) of the optimal solutions under the form of three-routing and two-routing planning with different weight values of passenger travel
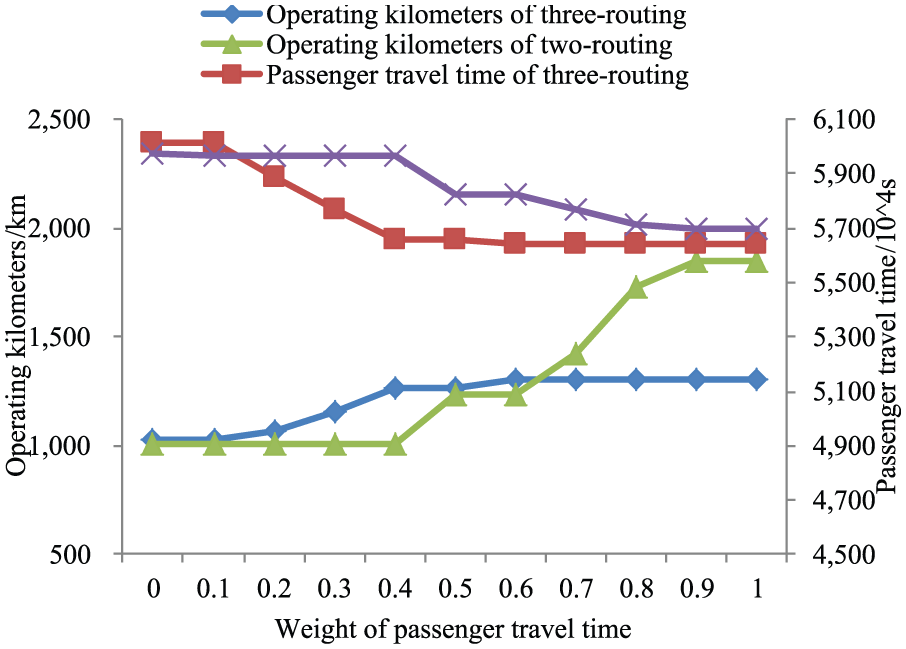
Objectives of the optimal solutions under the form of three-routing and two-routing.
Figure 11 shows the following:
When the weight of the passenger travel time increases, the passenger travel time of three-routing planning and two-routing planning decreases, while the train operating distance increases.
When the weight of the passenger travel time increases from 0.4 to 1.0, the operating distance of two-routing planning increases sharply while the passenger travel time decreases relatively flat. At the same time, the routing planning changes from Figure 9(b) to Figure 9(c), and the departure frequencies of both routings increase from 12 train/h to 20–30 train/h, leading to a quick increase in the train operating distance. However, the passenger flow of some stations on the line are relatively small because of the unbalanced characteristic, which makes the increase in the train operating distance more obvious than the decrease in the passenger travel time. Therefore, it is not necessary to increase the weight of the passengers too much because the cost increases much more.
When the weight of the passenger travel time ranges from 0.7 to 0.8, both objectives of three-routing planning are better than two-routing planning. Routing 2 in the three-routing planning does not cover L1−L2, so the passengers aimed to the branch boarding at Station 1 need to transfer and the passenger walking time for transferring increased a little. However, the frequencies of L20−L30 and L20−L37 are 18 and 12 train/h in the three-routing planning and 15 and 15 train/h in the two-routing planning, respectively; as more passengers travel on the trunk line, the three-routing planning can decrease the waiting time for transferring, and the degree of decrease is larger than the degree of increase in the walking time mentioned previously. Therefore, three-routing planning can better copy with the characteristics of the passengers’ demand by increasing the departure frequencies on sections with larger passenger flow while decreasing departure frequencies on sections with smaller passenger flow.
To discuss the influence of different routing planning and weight values on the comprehensive objective Z in formula (9), the comparison of Z under three-routing and two-routing with different weight values is shown in Figure 12. Z was the weighted sum of the standard value of the two objectives, so Z had no dimension, and the range of Z was [0, 1]. The values were obtained from Tables 5 and 6.

Weighted objective of the optimal routing planning under three-routing and two-routing.
Figure 12 shows the following:
When the weight of the travel time increases, the weighted objective of three-routing planning and two-routing both show decreasing trends after the first increase.
The smaller the weighted objective, the better the optimal solution. Thus, when ϕ = 0.1–0.6, the optimal solution is a two-routing planning; when ϕ = 0.7–1.0, the optimal solution is a three-routing planning. Therefore, three-routing planning is more suitable when the passenger travel time is more important while two-routing planning is more suitable when the train operating distance is more important.
Conclusion
In this study, a multi-routing planning design model of Y-type urban rail transit aimed at minimizing the passenger travel time and train operating distance was proposed, and the multi-objective model was turned into a single-objective model by giving the weight values of the objectives. The model optimized the departure frequencies and the locations of turn-backs of the routings considering the passenger demand and layout of the line. A GA was designed to obtain optimal solutions. A case was used to find out the effects of the variables on the objectives, and the standard values of the two objectives were given different weight values to discuss the change in routing planning. Also, the applicability of three-routing planning and two-routing planning was analyzed.
When the weight of the passenger travel time is lower, the optimal solution is two-routing planning; when the weight is higher, the optimal solution is three-routing planning.
When the weight of the passenger travel time increases, the passenger travel time of both three-routing planning and two-routing planning decreases while the train operating distance of both increases.
When the weight of the passenger travel time reaches to a certain value, three-routing planning can better meet the unbalanced passenger flow than two-routing planning by increasing the departure frequencies on sections with large passenger demand while decreasing those with small passenger demand.
This article did not consider the operational complexity of three-routing planning and the impact on the number of vehicles, which will be the focus of future research.
Footnotes
Academic Editor: António Mendes Lopes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by National Natural Science Foundation of China (71390332) and National Natural Science Fund Projects (71571061, 71201007).