
Abstract
With the requirements of the advanced propulsion systems for aircraft control performance increasing, it has attracted the attention to design more efficient controller that is based on the nonlinear model over the flight envelope directly. A nonlinear aircraft engine control method based on generalized minimum variance approach is studied. A nonlinear autoregressive with extra input aircraft engine model for a certain turbofan engine is built and is chosen as the control plant in this study. Then, a controller is designed for the identification model based on the nonlinear generalized minimum variance theory. And simulation results manifest the controller to satisfy the requirements of the tracking with the transient process and the regulation with the steady process.
Introduction
With the relevant technology fields developed in, for example, machinery, electronics, materials, and so on, the performance of aircraft engine is continuously improved, and the number of control variables is also increasing. 1 In traditional hydraulic system, engine control laws were designed primarily using classical control design methods, namely, frequency response and/or time-domain methods. It was always single loop, which means one input variable and one output variable. 2 However, today, the number of advanced propulsion system control variables has also been reached 15–25.3,4 The F119 has eight control variables in 1990s, 5 and the PW1128 engine equipped in the F16-XL also has up to 24 control variables. 6 The linear control theories about multivariable are abundant, such as linear quadratic Gaussian (LQG) or loop transfer recovery (LTR)7–9 and H∞ robust control.10–12 The nonlinear control such as sliding mode control,13,14 fuzzy control,15–17 adaptive control,18–20 and neural networks21,22 has also been investigated for engine control. It is reported that American engineers had researched the linear quadratic method to apply it for the engine control and had adopted the LQG or LTR method in the Design Method for Integrated Control Systems (DMICS) research programs. 23 Apart from this, there is no other information reported, and the traditional approach gain scheduling is still the primary method to solve the problem in practical project. 24
This phenomenon can be attributed to the following reasons. First, parts of the above advanced control algorithms are based on linear system theory that is extremely inefficient for such a strong nonlinear control of aircraft engine. Furthermore, due to the limited speed of engine control computation unit, most of the above methods could not achieve their owned performance. But, however, as the deepening study of nonlinear theory, breakthroughs come into reality in optical fiber technology, 25 composites, 26 and electronic equipment of heat resistant. 27 And it makes adopting the nonlinear control algorithm as a trend in engine design.
In this article, with the analysis of aircraft engine characteristics, a structure of nonlinear autoregressive with extra input (NARX) model has been identified using the data of a turbofan engine, and nonlinear generalized minimum variance (NGMV) control method28,29 is introduced to design the nonlinear control method for the turbofan engine.
This article is structured as follows: section “Engine model description” identifies the nonlinear model with the structure of NARX. Section “NGMV controller design” gives the complete control structure and formulates the solution by the method of NGMV. In section “Compare the performance of the controllers,” simulations are given to support the statements mentioned above, including the situation with disturbance and nondisturbance. Section “Conclusion” concludes this article.
Engine model description
It is difficult to obtain one analytical mathematical model which can describe the aircraft engine over the flight envelop. This article considers identifying model by the data from idle to take-off. And it is conducted under the condition of precision guaranteed.
NARX model is understood as an extension of the linear autoregressive with extra input (ARX) structure. It is a kind of identification method that combines ARX model and neural networks with multi-step prediction. 30 NARX includes feedback connections enclosing several layers of the network. The defining equation of the NARX model is as follows

where
The structure of the NARX model is shown in Figure 1, which is combined by regressors and nonlinear estimator in series connection; at the same time, the output is fed back to the regressors.

NARX structure.
The engine inputs used in this study are fuel flow
Identification results.


Results of the best identified NARX model: (a)
NGMV controller design
It is essential to introduce the framework of the complete NGMV control system first, as shown in Figure 3.

Framework of the NGMV control system.
A complete control system generally consists of the following types of components: a plant to be controlled, a number of sensors, and a controller (or calculator). 31 Considering the integrity of the complete system, here the reference signal model and the sensor model are given as equation (2)

where




and
As the control plant is a dual-input and dual-output model, the reference signal is ordered to match with it. It is impractical to obtain the ideal step signal in practice; therefore, the signals similar to the first-order inertia link are obtained instead of it.
With the characteristics of sensors, parameters are selected as equation (3)

where




And it is represented as
In Figure 3,
Based on the optimal control theory, the performance index is chosen as J, which can be presented as equation (4)

As shown in equation (5), the

Then, according to the theory of the optimal estimation and considering that

where

where


In equation (9),
According to the theory of Kalman 33 filter, as shown in equations (10) and (11)
where Q and R are the variances of the noise of the time update process w and the noise of the measurement update process v, respectively;
From the condition in equation (8), substitute

where

After substituting equations (8) and (13) into equation (12), equation (14) could be obtained

where


Hence, if

To avoid the process of inversing the nonlinear module, the optimal controller is given by

where
Compare the performance of the controllers
The simulations are carried out in this section based on the above theoretical analysis. To verify the effect of the controller, the NGMV controller and the traditional proportional–integral–derivative (PID) controller are compared.34,35 To consider the more realistic case, bounded disturbance is injected to examine the robustness of the system.
Application without disturbance
To consider the stability of the control system, a proportional–integral (PI) controller parameter is chosen as

A Butterworth filter is chosen to be

to compare the effect of different control methods. The results are shown in Figures 4 and 5.

Comparison of
Comparison of
Figure 4(a) shows the tracking control of the rotation speed of the low pressure between idle (76.2%) and take-off (100%), and Figure 4(b) is the magnified view of the acceleration process from 85.6% to 100%. The two control methods reach the steady state in 2 s, and no large overshoot exists during the tracking process.
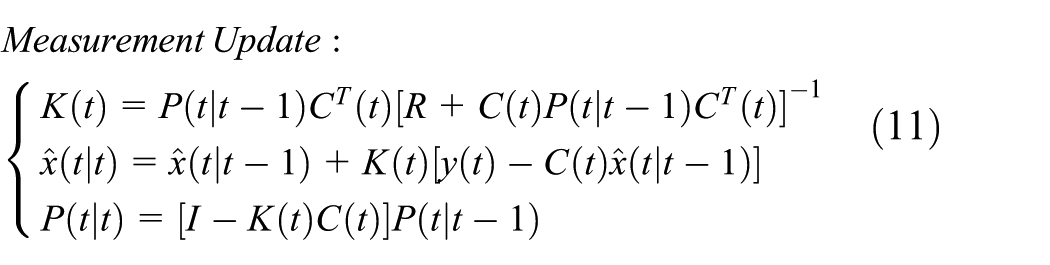
Figure 5 shows the performance of the
Figure 6 manifests the two control inputs by two control methods. On one hand, both fuel flow

Comparison of the control inputs: (a)
Application with bounded disturbance
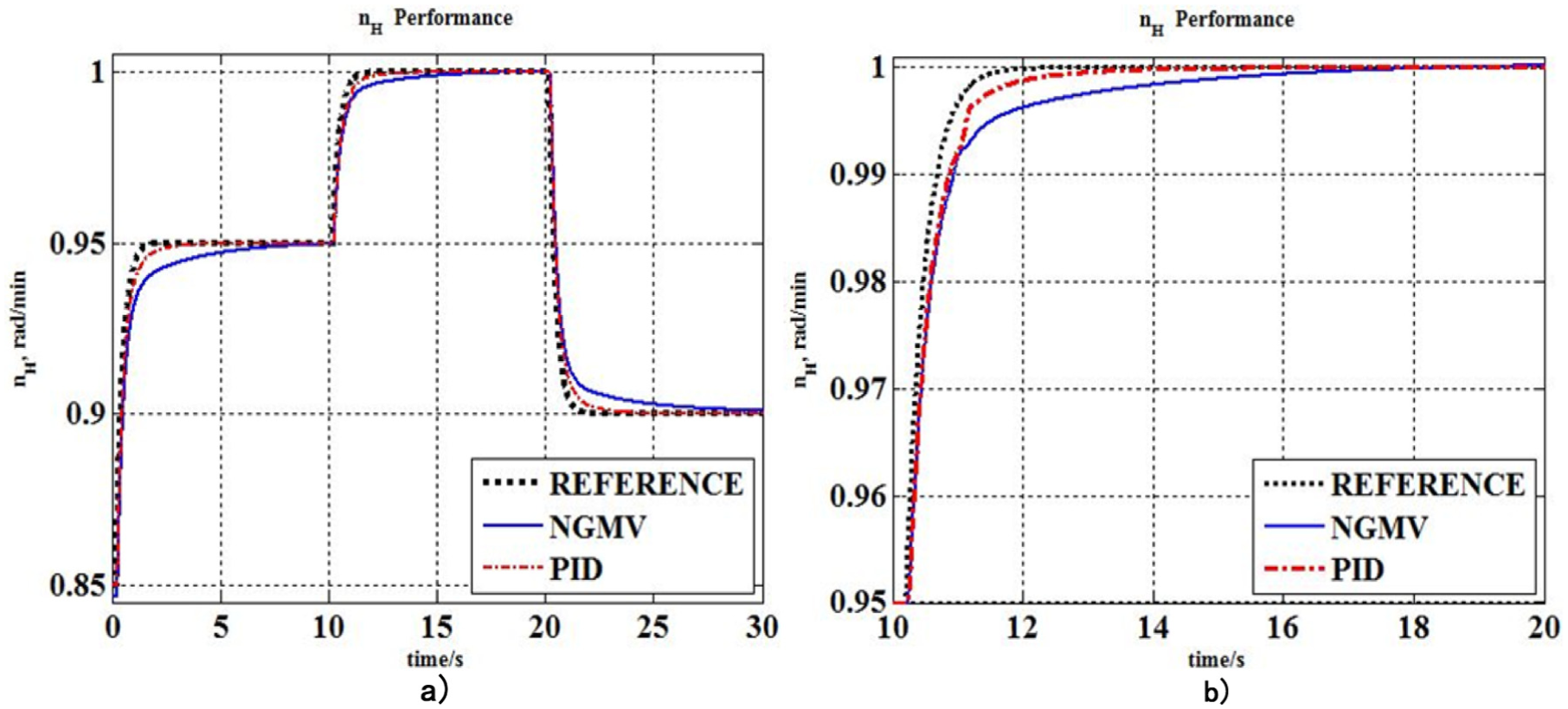
Any realistic system consists of disturbances in one form or another, and accordingly, the corresponding control design must consider certain robustness. A certain amplitude and frequency of the disturbance signal are injected in the system to verify the system. In view of the normalization processing (i.e. the range of the variables is between 0 and 1) of the controlled plant, here the amplitude of the disturbance signal with 0.1 is considered as 10% disturbance of the system. Similarly, 0.2 represents 20%. Figures 7 and 8 reveal the effects on the
Comparison of the
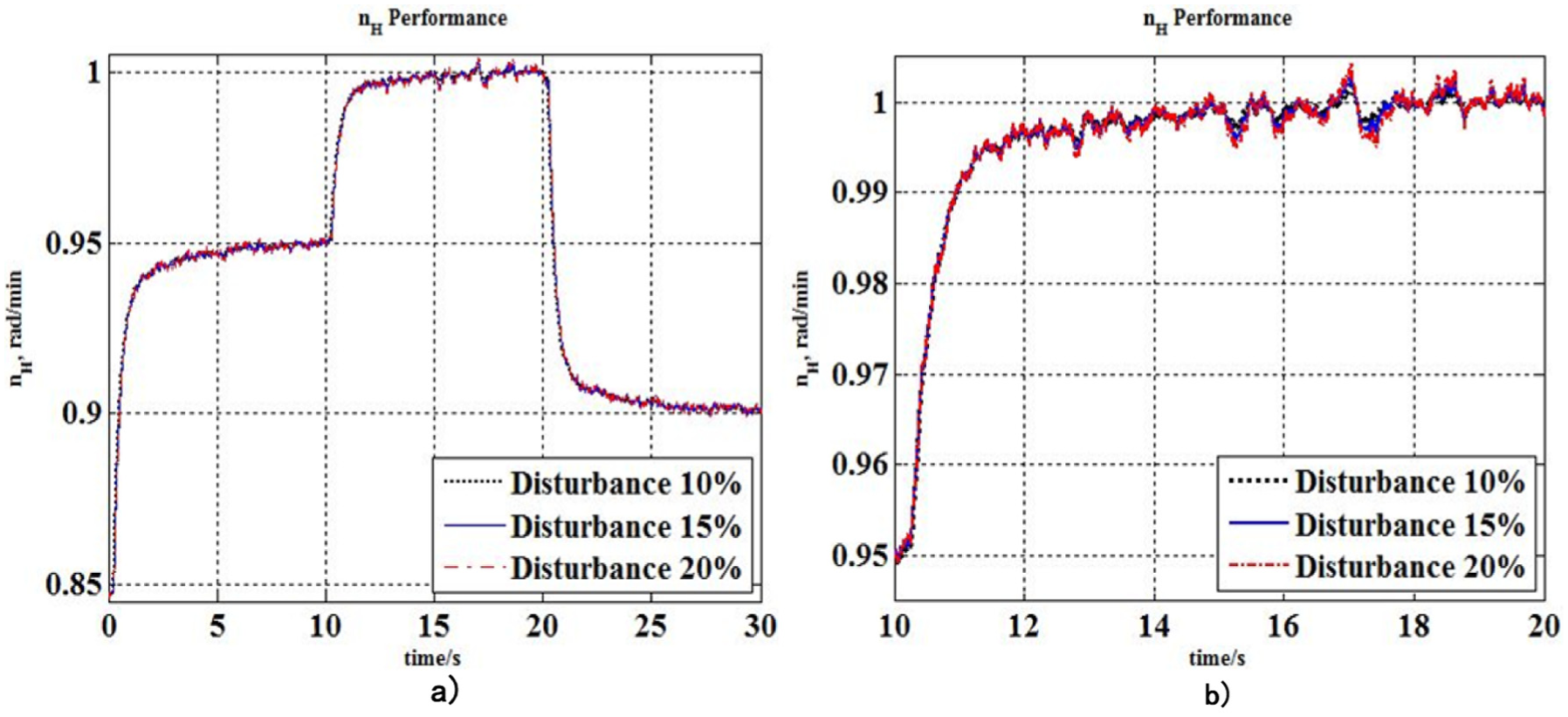
Comparison of the
It is obvious that both
As a consequence, the system possesses some property of disturbance suppression. When the amplitude of disturbance is <20%, the outputs are acceptable. As the amplitude increases, the suppressed effect becomes weak.
Conclusion
In this article, NGMV is proposed to design a nonlinear control system for turbofan engine represented by an NARX model structure. This type of model suits perfectly the situation where it is time-consuming to model the system dynamics. The proposed method demonstrates that its fuel consumption is more efficient with a smooth modulation than the traditional PID-type controllers. The method also possesses robustness to disturbances which may upset conventional design. The proposed approach is designed for multivariable control systems, variable cycle engine even adaptive engine control system can be further studied by adopting this framework for the next step of investigation.
Footnotes
Appendix 1
Academic Editor: Mario L Ferrari
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the Natural Science Foundation of Jiangsu Province (no. BK20140829 and BK20140820), Jiangsu Postdoctoral Science Foundation (no. 1401017B), the Fundamental Research Funds for the Central Universities (no. NJ20160037 and NS2016024), and Natural Science Foundation of China (no. 51406083).