
Abstract
The attitude synchronizing of formation flying spacecrafts is an essential ingredient in almost all practical situations. However, thus far no control scheme was proposed for synchronizing the attitude of multiple spacecraft without a prescribed reference attitude in the presence of disturbance torques and limited communication topology. A decentralized robust attitude control law is proposed in order to guarantee spacecraft attitude synchronization under external disturbances in the absence of a common reference attitude or any other hierarchy in the formation. The proposed controller is effective with a large range of communication topologies and is designed using the absolute angular velocity and attitude quaternion. The control scheme is robust against environmental disturbance torques. The convergence and stability of the proposed controller for the resulting closed-loop system are proven theoretically. Numerical simulations are included to validate the analytical results.
Keywords
Introduction
In recent years, spacecraft formation flying (SFF) has been extensively studied due to the fact that substituting a single large spacecraft by a swarm of simpler inter-communicating satellites may offer significant programmatic and scientific benefits. 1 One of the key challenges in SFF is orbit and attitude cooperative control. One approach for attitude control of formation flying satellites is to maintain a fixed relative orientation, a concept known as attitude synchronization. Attitude synchronization is a pertinent for SFF applications such as space-borne interferometry and synthetic-aperture imaging.1–3
Generally, control for attitude synchronization can be separated into centralized or decentralized control. 4 The former is fault-sensitive because the control instructions are generated by a single satellite whose failure can lead to the paralysis of the whole formation system. The latter, however, obtains superior fault-tolerance because the control of each spacecraft within the formation is based on local information, and the global control objective is achieved by the local control of each satellite. Thus, the failure of a single satellite will not lead to the destabilization of the entire system.
A number of results have been presented in the field of decentralized control. A behavior-based approach was adopted in archives4,5 to solve the attitude coordination problem of spacecraft formations. The basic idea of the behavior-based control is that the control action is determined by a weighted sum of each behavior (e.g. goal-attainment, collision-avoidance, and formation-keeping). By introducing a variable structure control into the behavior-based control, the authors of archive6,7 aimed at the developing robust attitude synchronization controllers under the circumstance of communication delays and external disturbances. The presented control laws had simple and intuitive structures, and the convergence of the closed-loop system was proven using Barbalat’s Lemma. Liang et al. 8 took into account both the parameter uncertainties and external disturbances in the synchronization controller design. Based on a finite-time convergence lemma and common Lyapunov functions, it was proven that the developed control schemes were effective if the uncertainties and disturbances both had upper bounds.9–11
However, all the aforementioned control strategies depend strongly on a desired external reference attitude, and each satellite within the formation must have access to the reference attitude. In the previous studies,12–15 the authors investigated a leader-follower formation without an external reference state. In Kristiansen et al., 12 a leader-follower formation without angular velocity measurements was addressed. The synchronization of the formation could be guaranteed using attitude information only. Considering the multiple-leaders situation, Dimarogonas et al. 14 and Meng et al. 15 successfully solved the attitude containment control problem for a formation flying system. The orientations of all the followers could be driven to the convex hull formed by the orientations of the leaders.
It is worth pointing out that in a leader-follower formation,12–15 the leader can be seen as a reference tracked by the followers, so the performance and robustness of the control schemes significantly relies on the status of the leader. Therefore, it is desirable to investigate a formation that contains neither pre-designated leaders nor external reference attitude commands dictating its behavior. Since such type of synchronization does not rely on a permanent communication of a reference attitude or on the reliability of a leader, the robustness of the formation will be increased.
In the previous studies,14–16 the authors introduced an energy-shaping method to solve the attitude synchronization problem for an autonomous formation with a restricted information exchange, the case of a leaderless formation was addressed in Dimarogonas et al., 14 and the control schemes presented in Meng et al. 15 are potentially extendable to an autonomous formation. However, these studies did not consider the external disturbances in the process of controller design. Ignoring environmental disturbance torques such as the gravity gradient torque, solar radiation pressure torque, and aerodynamic torque can jeopardize the mission. The control schemes proposed in Dimarogonas et al. 14 and Meng et al. 15 cannot guarantee attitude synchronization in the presence of disturbances.
In addition to the aforementioned issues, SFF is challenging since the information is always transmitted and exchanged through the inter-satellites network, and the communication is far from being perfect.
Inspired by these observations, the main goal of this research is to design novel attitude control schemes, which can guarantee attitude synchronization of a spacecraft formation in the absence of an external reference attitude, under environmental disturbances and a limited communication topology. To the best of the authors’ knowledge, such type of a control problem has not been addressed in the existing literature.
This article focuses on the attitude synchronization problem of an autonomous spacecraft formation subject to environmental disturbance torques. The term “autonomous” refers to the fact that there is no hierarchy in the formation, and there are no external reference attitude commands. This scenario is important to fail-safe operation, the initial deployment of the formation, attitude-keeping in between observations, or recovery after strong transient perturbations.16–18 Since the environmental disturbances play an important role in the attitude control, the goal of this research is to design decentralized attitude control laws that are robust under various disturbances and can steer the attitude states of the spacecraft formation to achieve synchronization asymptotically, without any leader or reference attitude. Quaternions are used to represent the attitude kinematics. Then, two classes of decentralized control schemes are proposed so as to achieve attitude synchronization in the presence of external disturbances. The first controller, using absolute attitude information, constitutes a general scheme effective under a large range of communication graphs, whereas the second is designed for a specific topology based on the relative attitude quaternion. By employing the Lyapunov stability theory, the convergence and stability of the resulting closed-loop system are proven.
This article is organized as follows. In section “Preliminaries,” preliminaries including the attitude description and lemmas are given. In section “Controller design,” the main result is presented, and the corresponding convergence and stability analysis are provided. In section “Numerical simulations,” an extension is presented, together with a discussion. In section “Conclusion,” numerical simulation results are presented to validate the theoretical analysis.
Preliminaries
Attitude kinematics and dynamics
Two Cartesian-rectangular-dextral reference frames will be used in the following developments:

In equation (1),
The kinematic equations, expressed in terms of the unit quaternion, are given by

where

where the notation
For synchronizing the attitude of a spacecraft formation, not only the absolute attitude but also the relative attitude between two spacecraft is needed. The relative attitude

where the subscript i denotes a quantity related to the ith spacecraft, and

The dynamics of each spacecraft within the formation are modeled using the Euler equations for rigid-body motion

where
To proceed, equations (2) and (6) are combined to provide the equations of motion in the Lagrange form

where
Lemmas
The following well-known lemmas are presented in order to facilitate the development of the subsequent control schemes.
Lemma 1
Consider the autonomous system
Lemma 2
Let
Controller design
Problem statement
The control problem of an n-rigid-spacecraft formation performing attitude synchronization without any external reference is investigated. Information is bidirectionally exchanged and transmitted over a limited network link. The communication topology of the formation is partially connected, which implies that each spacecraft within the formation can communicate only with a subgroup of the other spacecraft. Moreover, only the absolute attitude quaternion of the neighbors
The attitude synchronization problem is to design the control torque for each spacecraft within the formation so that the attitude states of each individual are steered to the same orientation asymptotically, that is,
Synchronization control laws
Because the communication topology considered herein is not fully connected, each spacecraft within the formation can only obtain attitude information from a subgroup of its neighbors. We use

where
Theorem 1
Controller (8) yields attitude synchronization in the presence of external disturbances for the dynamical model given by equation (7).
Proof
Consider the following candidate Lyapunov function

where

with



According to the Schur complement lemma,
23
Computing the derivative of

Then, substituting equation (7) into equation (14) yields

where
Since, for an undirected communication graph

then according to the definition of

where




and


where

and

Hence, the control objective

Then
In light of

It follows that
Practical considerations
The control objective
Note that the spacecraft formation in low-earth orbit (LEO) is mainly affected by the gravity gradient torque, while the disturbances such as the solar radiation pressure torque will be dominant for a formation in high-earth orbits such as geostationary orbits. All these torques are slowly varying and can be treated as signals composed of constants and periodic trigonometric functions. In this study, however, we have considered a worse situation wherein the disturbances do not need to be slowly varying. The convergence and stability analysis implies that if the disturbance torque has a known upper bound, then the proposed control strategies are effective, and the relative attitude between the spacecraft within the formation will asymptotically converge to zero.
Since the sign function in the control laws will causes chattering in the control signal that should be avoided, the saturation function below (or any other sigmoid function) can be utilized to replace the sign function

where
It should also be noted that only undirected and partially connected communication topologies are considered in the controller development. Notwithstanding its limitation, an effective method to solve the attitude synchronization problem of an autonomous formation under disturbances, which has not been investigated before, has been developed. On the other hand, the communication topology considered herein is a general one wherein each spacecraft within the formation can only communicate with a number of its neighbors to guarantee the connectivity of the topology. Such a communication environment implies that different kinds of formation architectures can be determined by different neighbors that each agent communicates with. Various formation architectures used by the spacecraft formation satisfying such communication conditions are shown in Figures 1–3.
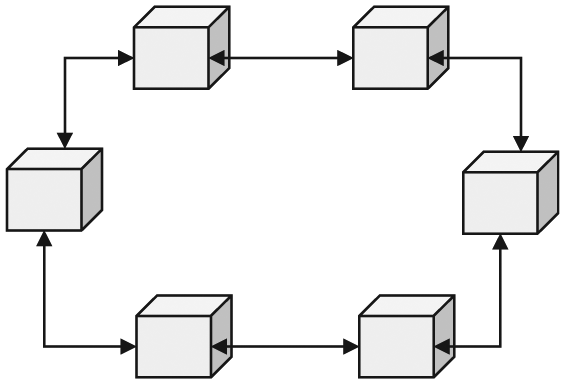
A ring-like formation architecture.

A tree-like formation architecture.

A cluster-type formation architecture.
In Figures 1–3, the individual spacecraft within the formation is represented by cubes. The information flow is represented by bidirectional arrows. A ring-like formation architecture is shown in Figure 1, where each spacecraft can communicate with two neighbors such that the path of the information flow forms a cycle. The tree-like formation architecture is illustrated in Figure 2. In this architecture, there is no cyclic information flow so that the number of the communication links (bidirectional arrows) satisfies
Numerical simulations
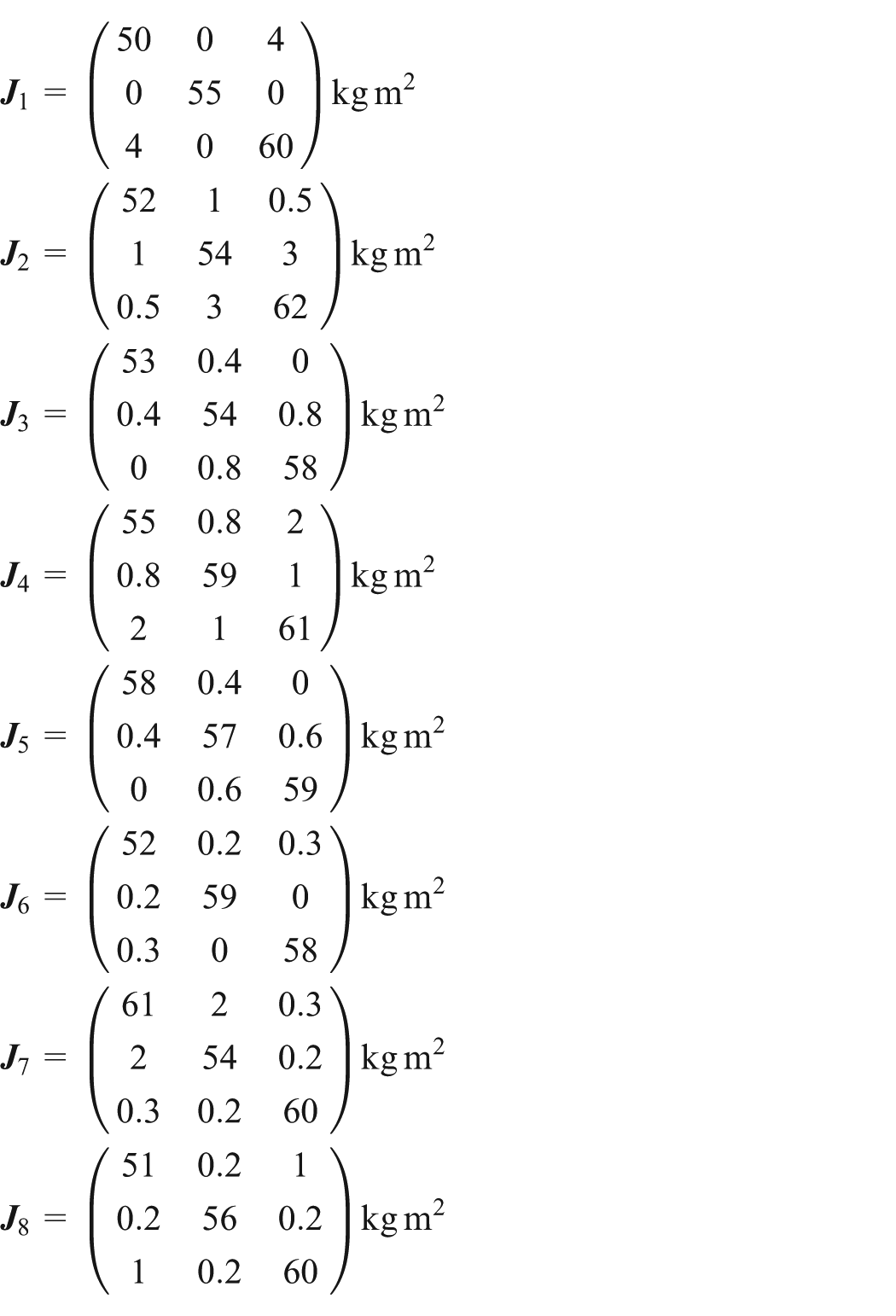
Numerical simulations of an eight-satellite formation in a LEO with a 400-km orbit altitude are presented in this section to validate the effectiveness and robustness of the proposed control schemes. Two scenarios are used for validating the control laws (8) and (29). The nominal inertia tensors are in the previous studies24–28
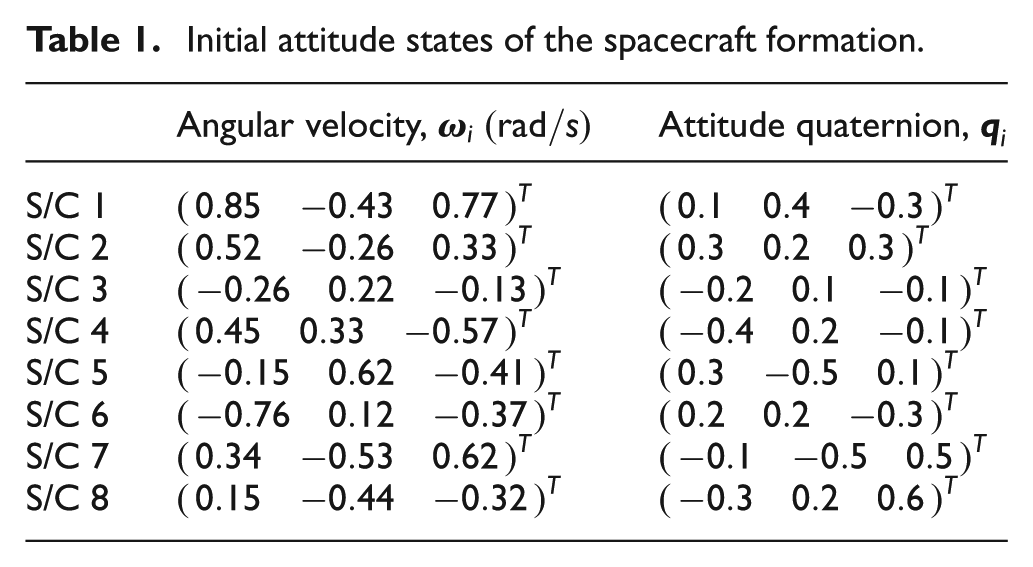
The initial attitude states of each spacecraft within the formation are given in Table 1.
Initial attitude states of the spacecraft formation.
The gravity gradient torque is the main external disturbance in LEO. The gravity gradient torque acting on the ith spacecraft can be calculated using the model of Pan and Kapila 29

where

where

is much larger in magnitude than the practical situation, and
is used to simulate the residual disturbances including aerodynamic torques, solar radiation torques, and similar effects.
Because of the discontinuous sign functions in the control laws, there will be chattering in the control signals, which may be harmful for any mechanical system. The saturation function presented in equation (28) with
The performance of the spacecraft formation is measured by an angular velocity metric and a relative attitude quaternion metric. The angular velocity metric is defined as
where

The spacecraft formation architecture is shown in Figure 4. Each spacecraft is equipped with controller (8). The control parameters are chosen as

The formation architecture.
The results for the formation architecture (Figure 4) are presented in Figures 5–8. Figures 5 and 6 show the transient behavior of the relative angular velocity metric and the relative attitude quaternion metric, respectively; the convergence and stability of control law (8) are validated. Both the angular velocity metric and the relative quaternion metric converge in approximately 110 s. In order to achieve high-attitude accuracy, one spacecraft should be controlled under a small control torque; the others take corresponding response, so the control torque shake could emerge. The real control result is embodied by angular velocity, and we can conclude from the Figure 5 that the velocity is stable and near to zero. Despite the large disturbance, high control accuracy is demonstrated in Figures 5 and 6. The control torque applied on each spacecraft within the formation is illustrated in Figures 7 and 8. As can be seen in Figures 7 and 8, the chattering in the control signals is alleviated significantly by virtue of the saturation function used in the control laws.

Angular velocity metric of the formation.

Relative attitude quaternion metric of the formation.

Time histories of the control torques of spacecraft 1–4 in the formation.
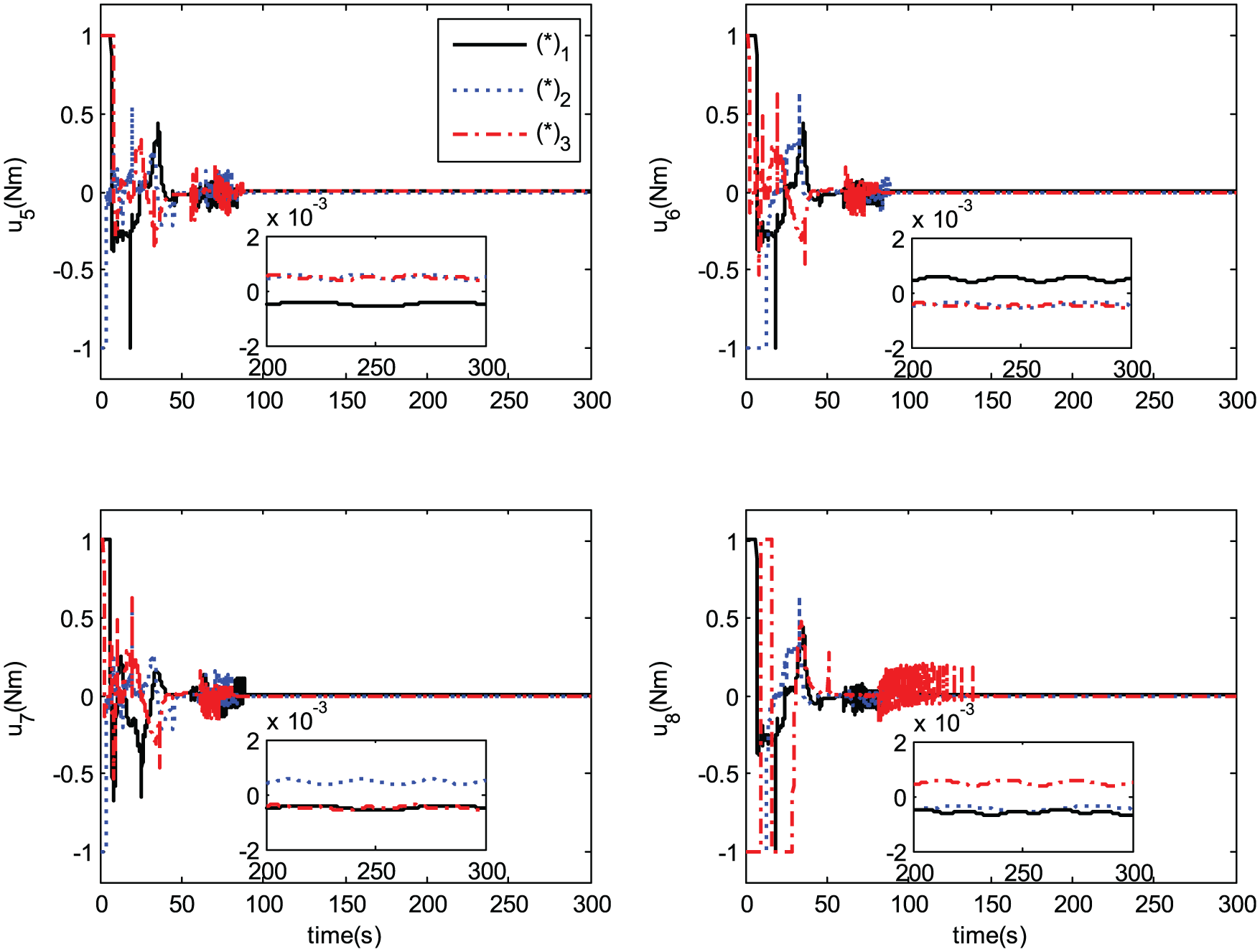
Time histories of the control torques of spacecraft 5–8 in the formation.
As a contrast, the adaptive sliding mode control algorithm of formation is simulated. The simulation curves are shown in Figure 9. From these output control torques generated by formation members, the stable control is smaller than the adaptive sliding mode control algorithm.

The control torques curves of contrast algorithm.
Conclusion
The main contribution of this study was the development and analysis of the decentralized attitude control schemes that can guarantee attitude synchronization of spacecraft within a formation without reference attitude, in the presence of large external disturbances and under limited communication. The controller was developed based on the equations of motion written in the Lagrange form. It was shown to be effective with a large range of information exchange graphs. The convergence and stability of the control laws for the resulting closed-loop system were proven. Finally, numerical simulations of an eight-spacecraft formation were performed. The effectiveness and robustness of the control schemes were tested in the presence of extremely large external disturbances, various initial attitude states, and bounded control torques. The simulations demonstrated satisfactory control performance and robustness, thereby reinforcing the analytical results.
Footnotes
Academic Editor: Nasim Ullah
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partially funded by the Fundamental Research Funds for the Central Universities (no. HEUCFD1503), the Natural Science Foundation of Heilongjiang Province (no. F2015032), the National Natural Science Funds (no. 11302127), the National High Technology Research and Development Program of China (no. 2013AA122904), Postdoctoral Science-Research Foundation (no. LBH-Q13042), and Innovative talents of science and technology research fund in Harbin city (no. 2013RFQXJ001).