
Abstract
In this article, an improved particle filter with electromagnetism-like mechanism algorithm is proposed for aircraft engine gas-path component abrupt fault diagnosis. In order to avoid the particle degeneracy and sample impoverishment of normal particle filter, the electromagnetism-like mechanism optimization algorithm is introduced into resampling procedure, which adjusts the position of the particles through simulating attraction–repulsion mechanism between charged particles of the electromagnetism theory. The improved particle filter can solve the particle degradation problem and ensure the diversity of the particle set. Meanwhile, it enhances the ability of tracking abrupt fault due to considering the latest measurement information. Comparison of the proposed method with three different filter algorithms is carried out on a univariate nonstationary growth model. Simulations on a turbofan engine model indicate that compared to the normal particle filter, the improved particle filter can ensure the completion of the fault diagnosis within less sampling period and the root mean square error of parameters estimation is reduced.
Keywords
Introduction
The performance and reliability of aircraft engine are the significant guarantee of the aircraft’s performance and flight safety. However, the complex structure and harsh operating environment make the aircraft engine to be a fault-prone system. Of all the engine failures, gas-path component fault accounts for more than 90%. In order to reduce maintenance costs and improve flight safety, engine performance estimation and fault diagnosis timely and accurately must be taken into account.1,2
Gas-path failures result in the changes in the performance parameters, such as thermodynamic efficiency and flow capacity, which will further result in changes in the rotational speed, temperature, pressure, and other measured parameters. 3 Therefore, aircraft engine gas-path fault diagnosis is mainly achieved through estimating health parameters according to the changes in measurement parameters, after which the health condition of the gas-path components is analyzed and finally the inspection and maintenance are carried out.
Currently, model-based approach is most widely used in gas-path fault diagnosis of aircraft engine, such as Kalman filter (KF), extended Kalman filter (EKF), and unscented Kalman filter (UKF). The KF algorithm is simple, but it is only applicable to linear systems. 4 The EKF algorithm utilizes the linear filtering theory to solve the nonlinear filtering problem by linearizing the nonlinear model. If the system is strongly nonlinear, linearization errors are non-negligible, which decreases the filtering accuracy and can even cause filtering divergence. 5 The UKF algorithm can better approximate the nonlinear characteristics of state equation and obtain higher estimation accuracy than EKF without linearization of nonlinear model. 6 However, the EKF and UKF methods are not applicable for non-Gaussian noise systems, whereas in practice, the process and measurement noise of engine systems are complex, which may not meet the Gaussian distribution assumption.
Particle filtering is a class of filtering methods arising in recent years that is suitable for nonlinear and non-Gaussian system. It is a methodology, based on Bayesian filtering and sequential Monte Carlo, whose basic idea is approximately recursive computation of posterior probability distributions using a set of weighted particles. Breaking through the theory frame of KF, theoretically, the particle filter (PF) is a strongly applicable approach without any limitations to statistical properties of the process noise and the measurement noise.7,8 However, there is a particle degeneracy phenomenon because the normal PF method, without taking the latest measurement information into account, regards the prior probability as a suboptimal importance function. To overcome the particle degeneracy, resampling technique is used to remove the smaller weighted particles and to copy the larger weighted particles, but it will cause particle impoverishment.9,10 In view of the main problems of particle filtering, numerous improved methods have been put forward, basically focusing on different choices of the important density functions and resampling methods, such as extended Kalman particle filter (EKPF) 11 and Markov chain Monte Carlo (MCMC)-based particle filter 12 . Recently, the PF based on intelligent optimization has been developed. Fang et al. 13 introduce a particle swarm optimization algorithm into particle filter (PSOPF) so that importance sampling distribution moves to higher posterior probability region, which increases the state estimation accuracy. However, the algorithm needs several known empirical parameters which will affect the filter accuracy directly. Zhang et al. 14 propose a method that uses artificial immune particle filter (AIPF) to select the required particles after repeatedly calculating and mutating operations. While the diversity of the particles is enhanced, the algorithm makes lower convergence speed and much higher level of computational complexity because every step the initial antibodies (particles) and the clonal antibodies are mutated and the weights need to be recalculated. Hence, the AIPF is not applicable to parameter estimation for high-dimensional and multi-parameter systems such as aircraft engine model. Electromagnetism-like mechanism (EM) is introduced into PF in Chen et al. 15 The algorithm utilizes the electromagnetism law to improve the distribution of the particles, and it increases the estimated accuracy. However, the algorithm lacks the Local Search procedure which is very important in EM, 16 and the EM is just iterated once every simulation step. These will affect the filter accuracy. In addition, the constant movement coefficient of the EM in this article is only suitable for a specific model.
For the reasons described above, an improved EM-based particle filtering (EMPF) algorithm is proposed in this article. The algorithm, simulating interaction force between charged particles, drives the particles to move toward the high-likelihood region and ensures the particles’ diversity and thus relieves the particle degeneracy and sample impoverishment. At the same time, with the consideration of the latest measurement information in the optimization process, this article attempts to enhance the ability of tracking abrupt fault. Finally, the effectiveness of the particle filtering method for engine gas-path abrupt fault diagnosis is simulated and validated on a turbofan engine.
Particle filtering
Particle filtering was proposed in 1993 by NJ Gordon et al. 7 The basic idea is to draw random samples (particles) from the importance distribution and then adjust the weights and position of the particles constantly according to the measurement information to approximate the true state posterior distribution. Finally, the weighted sum of particles replaces the integration item so as to obtain the minimum variance estimation of the state. Consider the discrete nonlinear system represented by the following state-space model

where
Assume the state prior distribution

State update equation can be expressed via Bayes’ rule as

Analytic solutions for the integrals in recurrence relations (2) and (3) just exist in a restrictive set of dynamic systems. Therefore, the PF adopts sequential Monte Carlo sampling method to approximate the optimal Bayesian solution. Under the assumption that N samples

where
In general, sampling directly from the posterior PDF is intractable, so a set of weighted samples

In the normal PF, it is convenient to select the prior distribution as the importance distribution, that is

Thus, equation (5) is reduced to

Normalize the weights and the posterior distribution can be expressed as

The law of large numbers can guarantee the equation approximate the true posterior probability
Improved particle filtering algorithm
Because the PF selects the prior PDF as the important density function without considering the latest measurement information, samples of the important density have a large deviation from samples of the true posterior density. As the algorithm evolves continuously, the weight variances increase, and all but few particles have negligible weights. As a result, significant computational resources are wasted on updating particles with minimum relevance to the posterior density, and it leads to the particle degeneracy phenomenon in turn. Although the resampling step reduces the effects of the phenomenon, it loses the particles’ diversity and results in sample impoverishment. To solve these problems, in this article, each sampling particle is assumed as a charged particle, the position of which is adjusted according to the attraction–repulsion mechanism of the electromagnetism theory.
EM algorithm
The EM, proposed by Birbil and Fang
16
who were motivated by the attraction–repulsion mechanism of the electromagnetism law, is an innovative population-based meta-heuristic algorithm for global optimization methods. By adopting the mechanism, each solution is regarded as a charged particle attracted or repulsed by others, moving to the optimal solution under certain rules in EM algorithm, and the convergence properties have been proved.
17
Calculating the maximum value of the objective function
Initialization. The procedure is used to sample N particles
Local search. The procedure is used to gather the local information for each sample particle, in which random linear search algorithm is used in a certain area to find better particle in order to achieve local update. Experiments show that when applying local search to the current best particle only, it can balance the number of evaluations and the accuracy of the results. After the procedure, the current best particle
Calculation of force vector. Total force calculation is the most important step in EM algorithm that combines the local information and the global information effectively. Imitating the superposition principle of electromagnetic theory, EM algorithm provides information for the next search through computing the total force.
The charge of each particle i determines its power of attraction or repulsion. This charge

In this way, the particles with better function values possess higher charges. It is worth noticing that unlike electrical charges, no signs are attached to the charge of an individual particle; instead, the direction of a particular force between two particles is decided after comparing their objective function values. Hence, the total force

As seen in equation (10), between each of the two particles, the particle with a larger objective function value attracts the other one. Contrarily, the particle with smaller objective function value repels the other one as shown in Figure 1. Since the current best particle
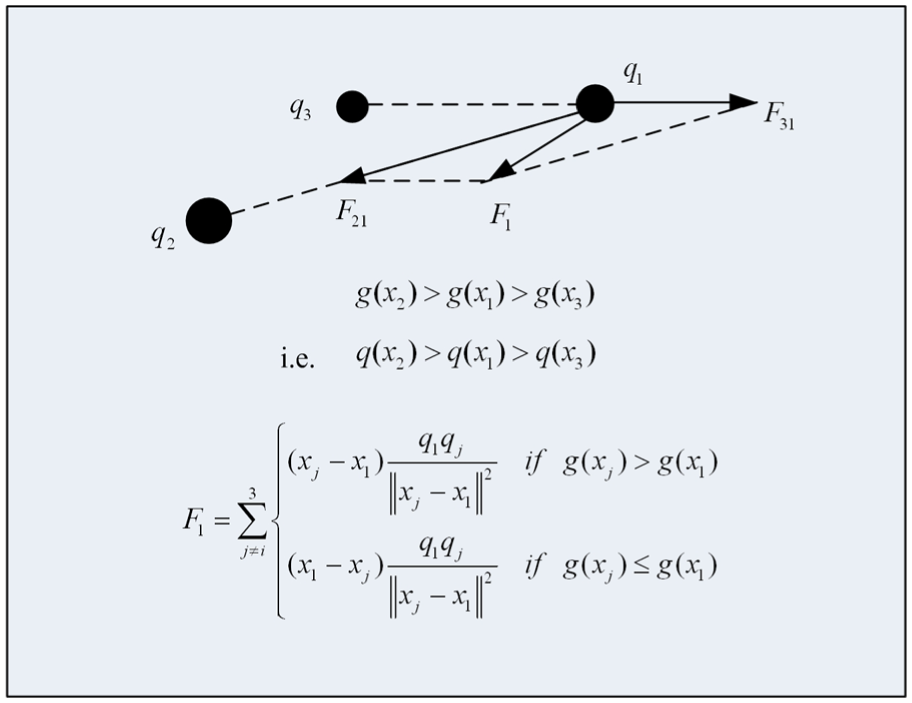
The principle of attraction–repulsion mechanism.
4. Movement. When the total force

where
After the above procedures, an iteration of EM algorithm is completed and the position of each particle is updated.
Improved EMPF algorithm
The performance of particle filtering is improved by utilizing the EM in the sampling process which moves the particles toward a better particle set and keeps a certain distance. Two improvements are proposed during EM algorithm applied in the PF:
Because of the complex computations and large calculations for the nonlinear dynamic model operation in practical application, the estimation time will multiply due to particle optimization using the EM algorithm. So, for the sake of filtering accuracy and efficiency, only the particles whose weights are less than the mean weight
It can be seen from equation (10) that if two particles are very close, the denominator part will tend to be infinitely small. As a result,

The flow chart of EMPF algorithm is shown in Figure 2. The specific implementation steps are as follows:
Parameter initialization. At time
Importance sampling and weights evaluating. Draw new particles from importance sampling distribution, that is, state transition PDF:
Particles adjustment by EM. Set the particle weight

State estimation

Resampling. Calculate effective sample size

The procedure of EMPF algorithm.
Comparison of filters for univariate nonstationary growth model
In this section, four filter methods are applied to the univariate nonstationary growth model (UNGM), which is popular in econometrics and has been used previously in Gordon et al. 7 and Kitagawa. 19 This model is highly nonlinear and is bimodal in nature. The state-space equations for this model can be written as

where
The estimation performance of the EKF, PF, PSOPF, and EMPF is assessed in terms of the root mean square error (RMSE):
In total, 100 independent simulations were performed to compare the four filters. Figure 3 shows the true states and the estimates obtained using the EKF and PF, PSOPF, and EMPF with
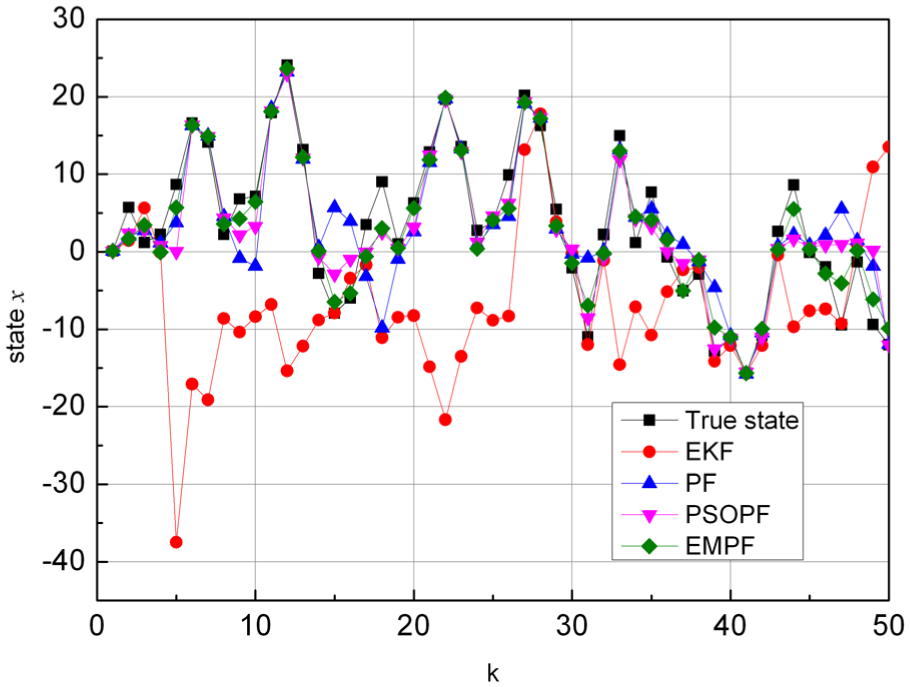
Estimation results for UNGM.

Estimation errors of four algorithms.
In Table 1, the effective sample size Neff, the mean and variance of RMSE, and the computation time T are given for 100 and 500 particles in the different levels of noise. Even for a small number of particles
Performance comparison of four algorithms for UNGM with different process noises.

EKF: extended Kalman filter; PF: particle filter; PSOPF: particle swarm optimization algorithm based particle filter; EMPF: EM-based particle filtering; RMSE: root mean square error.
Notice that the performance of the EMPF is not much different from PSOPF because the two filters both introduce intelligent optimization algorithms into resampling procedure. The difference is that the PSOPF moves the particles according to optimal solutions of individual and population, whereas the EMPF imitates the interaction force between charged particles to move the particles. Due to considering the effect of attraction and the repulsion which not only inhibits the particle degradation but also ensures the diversity, the EMPF performs a little better than PSOPF which does not consider the particle diversity. The most important thing is that the inappropriate selection of inertia coefficient w and learning factors
Application of EMPF for aircraft engine gas-path abrupt fault diagnosis
In this section, the performance of EMPF algorithm is applied for a turbofan engine by selecting eight performance parameters which are the efficiency variation coefficients and the flow capacity variation coefficients of the four rotating components including fan, compressor, high-pressure turbine, and low-pressure turbine. Figure 5 shows the principle of gas-path component fault diagnosis based on EMPF algorithm. The diagnosis principle is to estimate the degradations of the components’ performance parameters through comparing the error between real engine outputs and model prediction. Therefore, the engine gas-path component fault diagnosis can be transformed into the state estimation problem of the components’ performance parameters.

The principle of engine gas-path fault diagnosis based on EMPF algorithm.
Aircraft engine gas-path abrupt fault model
The nonlinear equations modeling the turbofan engine can be described as follows

where control vector

where
The vector RNG in equation (11) is related to the upper or lower bound of state variables. Refer to the statistical data of the performance degeneration of gas-path components after cycling work of a turbofan engine on the NASA MAPSS simulation platform, 20 and the bounds are given as Uk = [1.1, 1.1, 0.005, 0.005, 0.005, 0.005, 0.005, 0.03, 0.005, 0.01] and Lk = [0.9, 0.9, −0.04, −0.03, −0.06, −0.09, −0.03, −0.005, −0.01, −0.005], where the first two data are the range of normalized low-pressure and high-pressure rotor speed, and other data are the range of performance variation coefficient. In order to be comparable, in the simulation, the bound conditions are considered in state variable estimations of all algorithms.
Simulations including single-component fault and multiple-component fault are conducted at ground steady operating point
Performance parameter estimation with Gaussian noise
Fault modes are given according to Borguet and Leonard.
21
Estimation results of four algorithms with Gaussian noise under the single-component fault: (a) EKF, (b) PF, (c) PSOPF, and (d) EMPF.
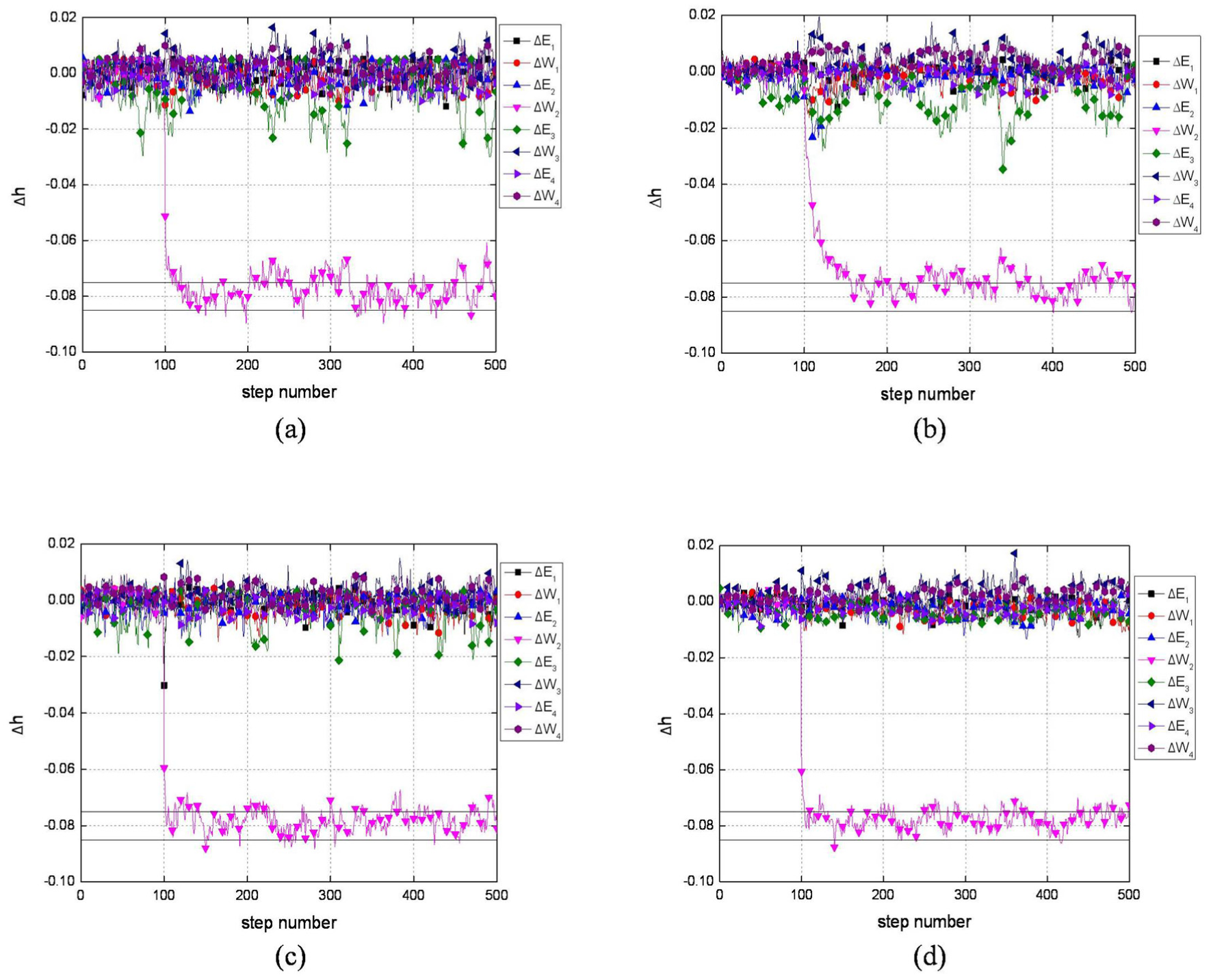
Estimation results of four algorithms with Gaussian noise under the multiple-component fault: (a) EKF, (b) PF, (c) PSOPF, and (d) EMPF.

Estimation errors of four algorithms with Gaussian noise: (a) single-component fault and (b) multiple-component fault.
Performance comparison of four algorithms with Gaussian noise.

EKF: extended Kalman filter; PF: particle filter; PSOPF: particle swarm optimization algorithm based particle filter; EMPF: EM-based particle filtering; RMSE: root mean square error.
As it can be seen from Figures 6 and 8(a), in the Gaussian system, due to the existence of linear error, the parameters estimated with the EKF fluctuate greatly, and its steady-state accuracy is lower than the PF. However, the PFs track the abrupt process slowly due to complex computation and the ignorance of the latest measurements. So, as shown in Table 2, the RMSE of the two algorithms is close. The intelligent optimization algorithm is introduced into the PSOPF and the EMPF, which alleviates the particle degeneracy phenomenon and improves the steady-state accuracy of estimation. Meanwhile, with the consideration of the latest measurements in the optimization process, both of the improved filters can track the abrupt fault very well, which improves the dynamic estimation accuracy. As a result, the RMSE reduces greatly. However, the estimation error of the high-pressure turbine efficiency
Performance parameter estimation with non-Gaussian noise
In general, the real engine works in a complex and changeable environment, the noise of which contains not only internal white noise but also nonstationary colored noise; therefore, the process noise and the measurement noise are not necessarily white Gaussian noise.
22
In order to simulate the real engine, this article selects Gamma distribution function as the non-Gaussian noise for simulation evaluation:

Estimation results of four algorithms with non-Gaussian noise under the single-component fault: (a) EKF, (b) PF, (c) PSOPF, and (d) EMPF.

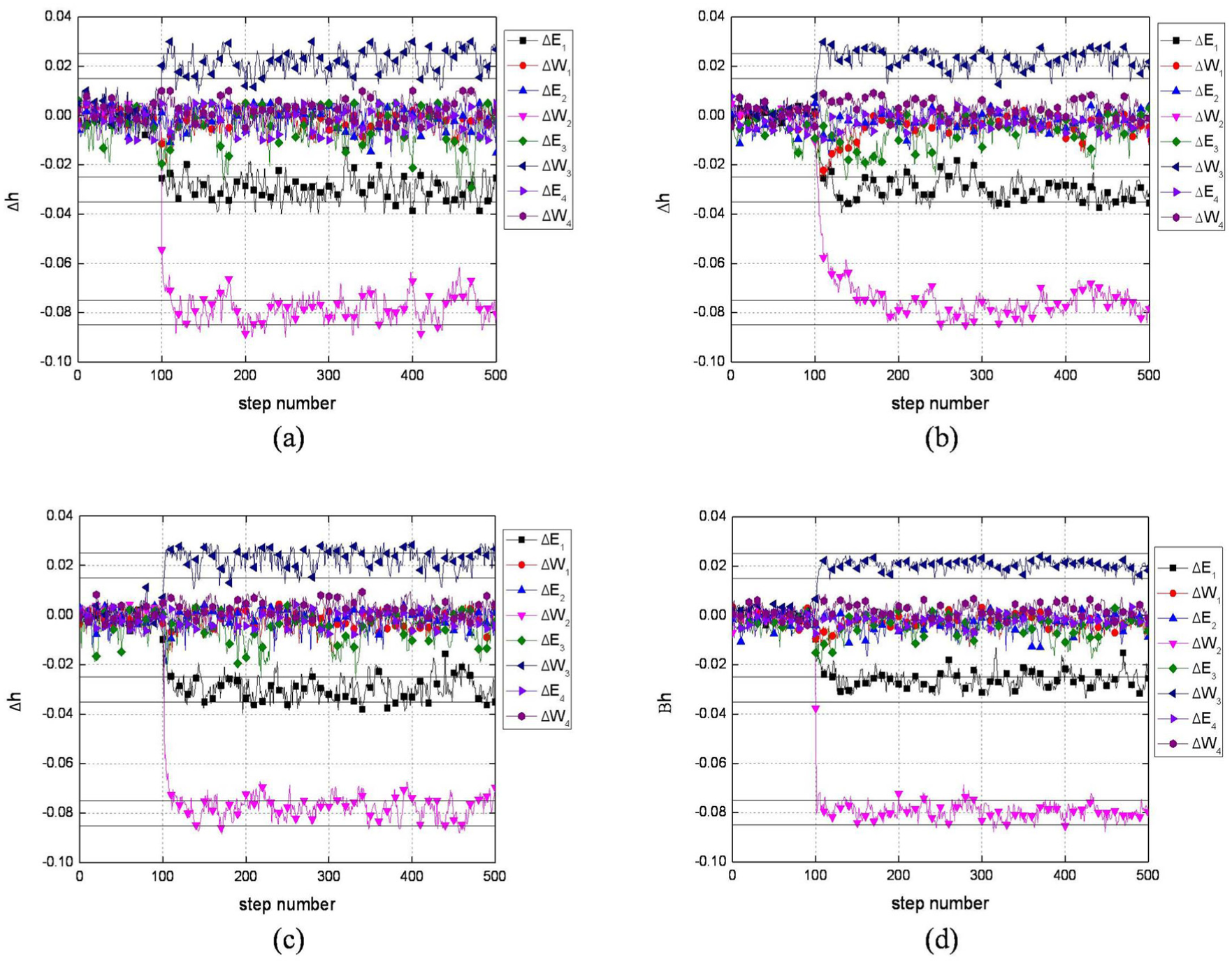
Estimation results of four algorithms with non-Gaussian noise under the multiple-component fault: (a) EKF, (b) PF, (c) PSOPF, and (d) EMPF.

Estimation errors of four algorithms with non-Gaussian noise: (a) single-component fault and (b) multiple-component fault.
Performance comparison of four algorithms with non-Gaussian noise.

EKF: extended Kalman filter; PF: particle filter; PSOPF: particle swarm optimization algorithm based particle filter; EMPF: EM-based particle filtering; RMSE: root mean square error.
Figures 9–11 and Table 3 show that for non-Gaussian system, the estimation accuracy of the EKF decreases greatly and thus the misdiagnosis happens easily. Although the RMSEs of the PF, the PSOPF, and the EMPF increase slightly, the performance parameters of the engine are still tracked well, which means that the three methods have a better applicability within non-Gaussian noise. Among them, due to the remission of the particle degeneracy and sample impoverishment phenomenon and the consideration of the latest measurements, the EMPF algorithm maintains a higher filtering accuracy and tracks the abrupt fault in a very short time.
Conclusion
An improved particle filtering algorithm is proposed for the gas-path fault diagnosis of aircraft engine. Considering the particle degeneracy and sample impoverishment phenomenon of the normal particle filtering and the slow response of estimation for abrupt fault, the intelligent optimization algorithm has been introduced and the EM-based particle filtering is proposed.
The estimation effectiveness of the four nonlinear filters, the EKF, the PF, the PSOPF, and the EMPF, are compared for UNGM and engine gas-path fault model. Compared to the EKF, the PF, the PSOPF, and the EMPF are not only applicable for the Gaussian system but also applicable for non-Gaussian system. Because of the introduction of the intelligent optimization algorithms and the consideration of the latest measurements, the estimation effect of the performance parameters with the PSOPF and the EMPF is better than the PF. In addition, while the EM drives the particles to move toward the high-likelihood region, it also keeps them in a certain distance, which ensures the particles’ diversity. The simulation results show that the estimation effect with the EMPF is a little better than the one with the PSOPF. The EMPF does not need any empirical parameters which cause the decrease in PSOPF accuracy and slow convergence. In summary, the EMPF is an effective filtering method suitable for gas-path abrupt fault diagnosis of nonlinear engine system.
Footnotes
Academic Editor: Nam-Ho Kim
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (51276087).