
Abstract
Vehicle–pavement coupling systems may produce strong vertical random vibration due to the road surface unevenness and then further induce random vibration of adjacent buildings. It is usually difficult to numerical analyze efficiently as the model precision and calculation scale of complicated random analysis. In this article, a longitudinal infinite Kirchhoff plate with Kelvin foundation is employed to model the pavement system, and by proving the symplectic orthogonal characteristic for the damped chain substructure, the infinitely long road surface is regarded as a periodic chain-type substructure, the model is accurate, and computation scale is reduced. Models of a half vehicle and an adjacent building are coupled to the plate to produce a unified finite element model. The plate element stiffness matrix is formulated in the coordinate moving with the load, a typical model of road substructure is built, and the two-dimensional moving element method of vertical coupling random vibration is formulated, and then the time-varying non-stationary random vibration may be transformed into time-invariant stationary system. Using the pseudo-excitation method, vertical dynamic responses of the unified model of vibration source, supporting structure, and vibrated structure are analyzed. The computation efficiency of this method is numerically justified and some vibration influence rules of vehicle to building are drawn.
Keywords
Introduction
Complex urban transportation may have harmful influences on the surrounding residents and buildings, principally the environmental random vibrations induced by vehicle–pavement–structure coupling.Effectively reducing the influence of vibration and improving residential conditions are the key issues for sustainable transportation development.1,2 Vehicle–pavement coupling vibrations induced by road surface irregularity are essentially random. This kind of coupled random vibration can induce the secondary vibrations of adjacent buildings by impact load spreading through the pavement structure, foundation, and the surrounding strata. This research field involves three areas: the random vibration of vehicle–pavement coupling systems, wave propagation in strata, and the secondary vibration of adjacent buildings, all of which are random and time-varying.
While many recent theoretical and numerical contributions have been made in the field, they mainly focus on the computing capability and efficiency of analysis methods. Hayakawa et al. 3 investigated the vibration characteristics of different parts of the vehicle, rail, bridges, and ground by establishing a numerical dynamic interaction analysis model of high-speed train-via-duct-foundation soil and using field tests of environmental vibration caused by the Shinkansen high-speed trains. Xu et al. 4 studied the effects of track irregularities on environmental vibration caused by underground railway and built a train–track–tunnel soil interaction model; the vibration acceleration and frequency distribution of ground surface were obtained. Alves et al. 5 presented a 2.5D finite element method (FEM)–boundary element method (BEM) model and a global description of a test site on a stretch of the Portuguese railway network. Xia and colleagues6,7 researched environmental vibration caused by traffic systems, established a systematic analysis model of vehicle–structure–environment–building, and derived some rules for the propagation of the vibration in ground, underground, and elevated rail transit, including different terrains, speeds, and loads. By means of a vehicle–track–soil coupled vibration model based on vehicle–track dynamic theory, Zhai and colleagues8,9 used the FEM to obtain the characteristics of soil deformation and vibration and an attenuation law at subcritical and near-critical speed. Yang and Hung 10 successfully proposed a 2.5D finite/infinite element procedure for dealing with the ground vibrations induced by moving loads, greatly reducing the numerical computation, and solved three-dimensional dynamic problems under train loads. Connolly et al. 11 evaluated the effect of vibrations on passenger comfort, followed by its effect on track performance; the ground-borne vibration was discussed along with its effect on the structural response of the building near railway lines. Tao and Wang 12 analyzed the environmental vibration caused by the railway and provided an effective method for the calculation of train random vibration load by combining the pseudo-excitation method (PEM) with the analytical model of vertical vibration of vehicle–pavement–foundation coupling.
It is concluded from these pioneering works in the field that the difficulties mainly focus on three aspects. The first difficulty is establishing a reasonable analytical model. The complete vibration system includes three basic subsystems, and each coupling relationship between the subsystems has its own characteristics. Vibration responses transferred with energy waves can lead to arbitrary energy dissipation if the subsystem models are analyzed separately. Second, the conventional methods for integrated system analysis are complicated and costly, which is particularly unacceptable when considering pavements of unlimited length and complex boundary conditions. Finally, it is difficult to accurately define the random characteristics of every subsystem.
To overcome these difficulties, in this article, an integrated model is recommended to analyze the environmental vibration caused by a vehicle–pavement coupling system, and a corresponding numerical analysis method is also developed based on the two-dimensional (2D) moving element method (MEM) and periodic chain substructure theory. Numerical examples justify the correctness and high efficiency of this new method, which is then used in the vertical random vibration analysis of an adjacent building.
Symplectic analysis of pavement periodic chain substructure
The integrated mechanical model for environmental vibration caused by the highway traffic load coupling system is shown in Figure 1.
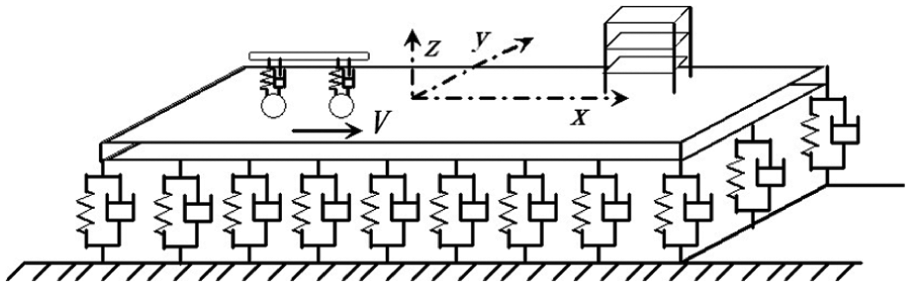
Integrated environmental vibration model.
An infinitely long Kirchhoff plate with a Kelvin foundation is employed to model the pavement and foundation structures. The vehicle is regarded as a half rigid model, and the wheels are assumed to remain in contact with the pavement at all times. Thus, the random vibration system can be coupled with the supporting pavement based on the displacement coordination condition. The adjacent building is modeled by the beams and columns, which couple with the supporting structure through elastic connections as shown in Figure 2.

Coupled model of building structure and road foundation.
Thus, the coupled dynamic model can describe the vehicle–pavement–building coupling random vibration system, which is a time-varying non-stationary multiexcitation random problem. Usually, the dynamic equation of the vehicle is deduced based on multi-body dynamics theory, D’Alembert’s principle gives the differential equations of motion of the pavement, and the coupling dynamic equation is derived as equation (1) by displacement coordination condition between the wheel and pavement. Note that this section focuses on symplectic orthogonal characteristic for the damped chain substructure and gives the key equation only, because their derivation has been given elsewhere 13

in which the time-varying random excitation caused by pavement surface roughness is denoted as the vector
The pavement is usually considered as an infinitely long structure in engineering. In numerical simulation, the calculation of equation (1) is complicated and costly when considering an infinitely long pavement, whereas truncation error is obvious when considering just a part of the pavement structure. This section gives the well-established symplectic solution method for a periodic chain substructure and shows how it is applied to the infinite pavement structure. Figure 3 shows a periodic pavement substructure model, in which a harmonic wave with frequency

Periodic pavement substructure model: (a) stereoscopic sketch and (b) plan sketch.
The undamped equations of motion of the substructure have been proved in Lu et al., 14 and the equations for hysteretic damping are

where the subscript a denotes the left ends of the substructure; similarly, b denotes the right and i the internal nodes.

Considering the displacements and forces as state vectors

when the substructure has no external loads (i.e.

where


It has been proved
15
that


where

The corresponding eigenvectors can then be used to constitute the matrix

The state vector

The coefficients


where
For the substructure which is subjected to the harmonic excitation, that is,

Substituting equation (12) into equation (3) yields the equation of motion denoted by the symplectic modal coordinate

Therefore, a periodic chain substructure can be chosen to analyze the vertical vibration of an adjacent building instead of an infinitely long pavement model.
Vibration analysis and MEM
A substructure of length
In this mechanical model, the vehicle is regarded as a spring–mass–damper system with 4 degrees of freedom, namely, the vertical motion of the vehicle body, rotation in the

where
For single-point or multi-support excitation models, it is effective to change the moving vehicle load into contacting pavement elements by assuming a moving coordinate, as shown in Figure 4. Based on the 2D MEM, 16 the elements are formulated in a relative coordinate system attached to the moving vehicle. These are not physical elements attached to the material, but are conceptual elements that “flow” along the pavement with the moving vehicle. The main advantage is that the moving vehicle is relatively static in this coordinate system and does not cross from one element into another, thereby avoiding the updating of force and displacement vectors due to the change in contact point on the elements.

Discretization of plate into moving elements.
Now consider a typical moving rectangular element of length a and width b, with nodes i, j, m, and l. Define the moving coordinates

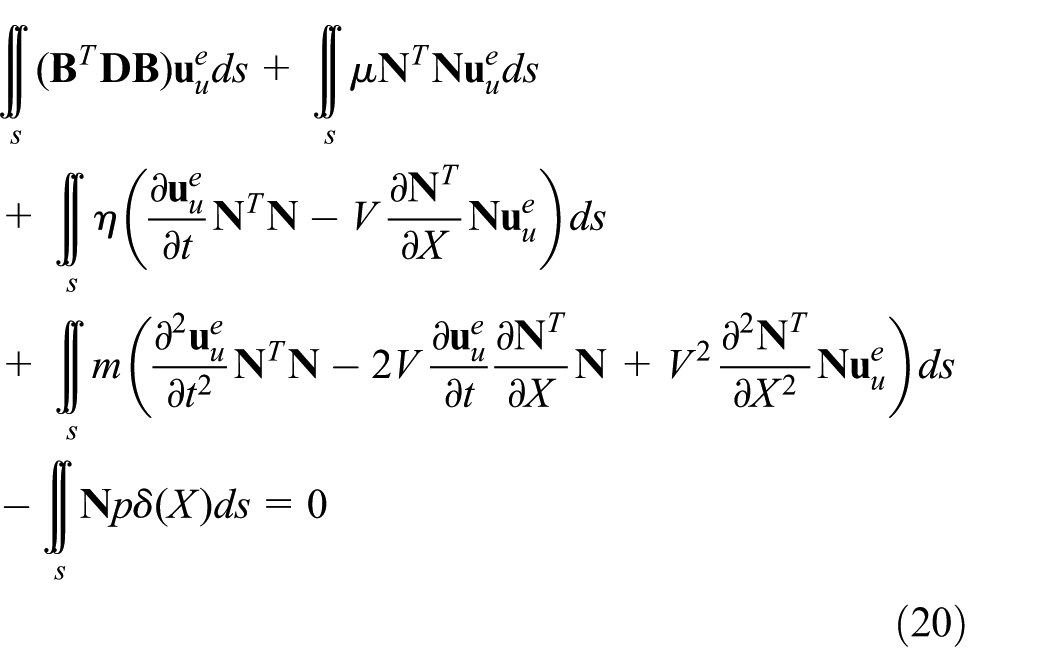
Then the equation of motion of this moving element can be expressed as

Using the FEM, the deflection

where




in which

where

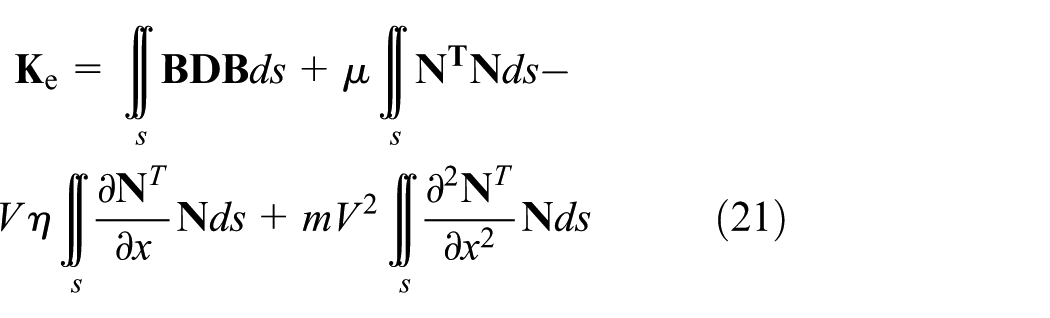
Substituting equations (17) and (18) into equation (19) gives


It can be shown that the element mass


Assembling all the element matrices gives the equations of motion of the pavement

Here,


where
PEM of moving element
For the coupled random vibration of equation (24), the response power spectral density (PSD) matrix can be expressed as 18

where
In the vehicle–pavement computational model,

where

where


where

Note that it is assumed that
Numerical example
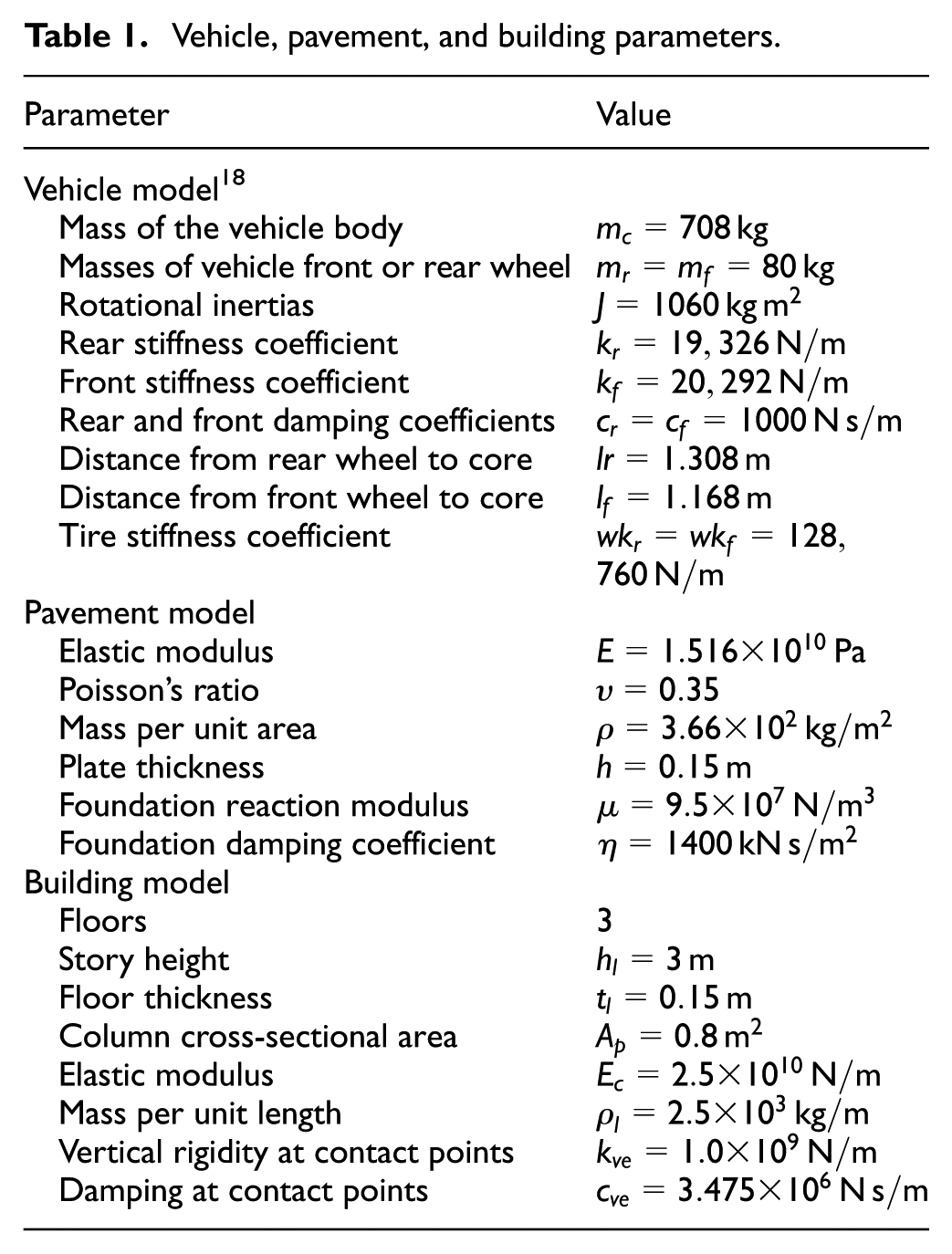
Computational model and parameters
A simplified model of a coupled vehicle–bridge system is shown in Figure 1. Assume the vehicle moves in the x-direction (at
Vehicle, pavement, and building parameters.
Computational results and response analysis
Using a self-compiling program in MATLAB 6.5, 20 the vibration responses of the three subsystems are obtained and shown in Figures 5–9. Figure 5 shows the three-dimensional deflected shape of the pavement. It can be seen that the deflected shape is a strip deformation and it is influenced considerably by the moving speed. The responses of the pavement and the belt of folded strata adjacent to the building are relatively strong, because the building’s larger rigidity enhances the pavement stiffness. Correspondingly, the response amplitude on the other side is much weaker.
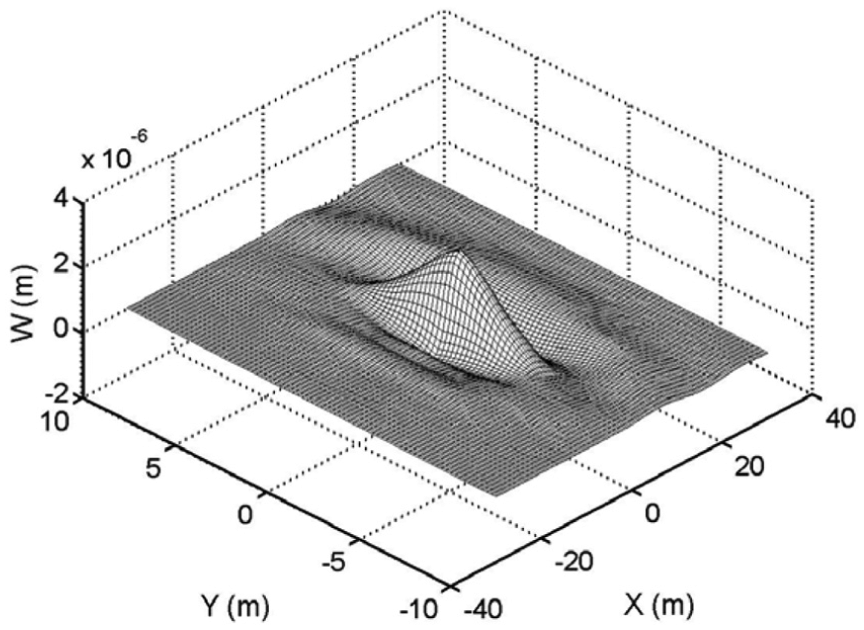
Three-dimensional deflected shape of the pavement.

Vehicle vertical acceleration PSD.
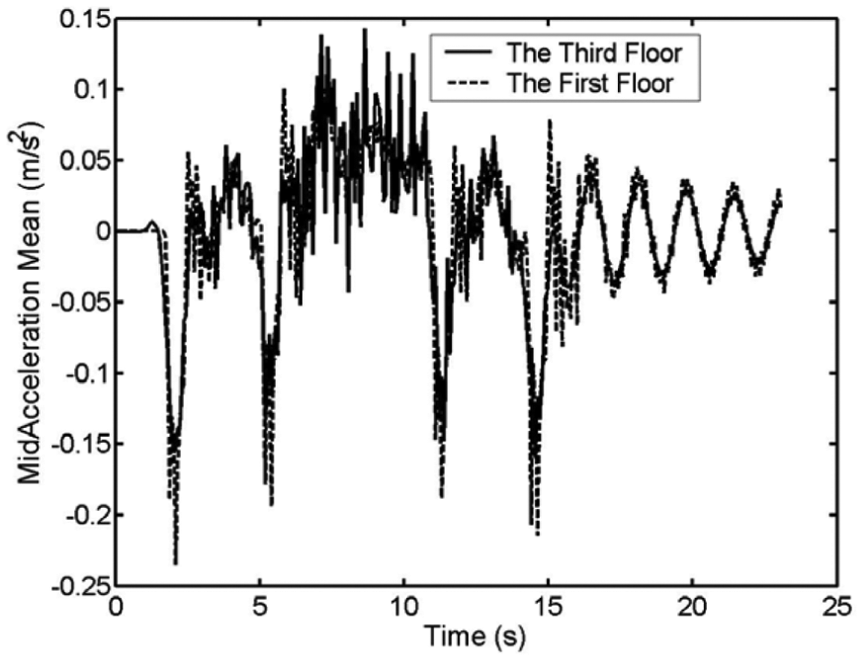
Building mid-acceleration responses.
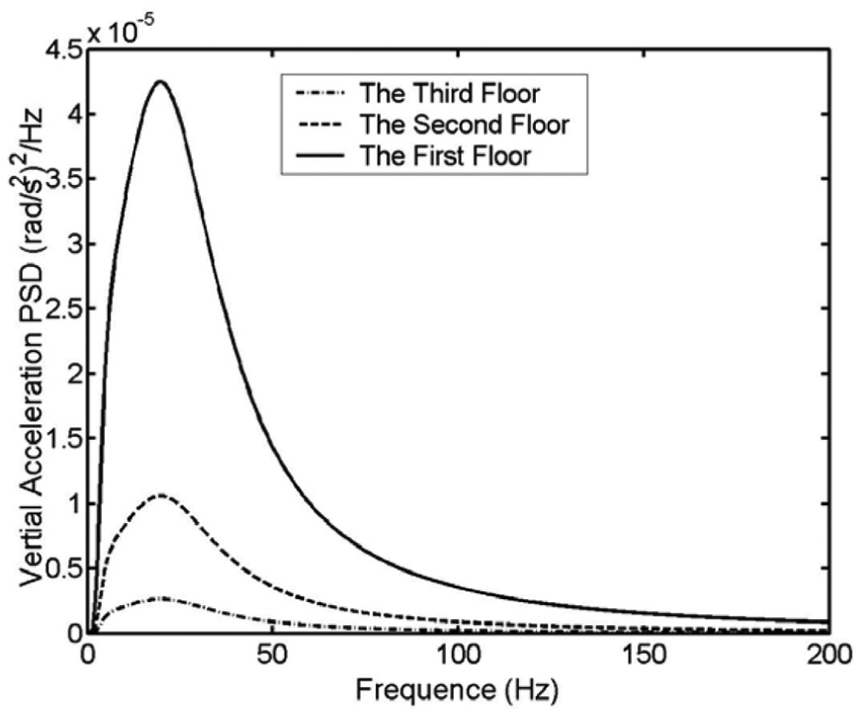
Building vertical acceleration PSD.

Building mean vertical displacement.
Figure 6 shows the PSD of vehicle body vertical acceleration when the road condition is Grade B. It shows two peaks, the first peak just below 2 Hz and the second at about 6 Hz, which are caused by the phase difference of wheel excitations.
Figures 7–9 give the vertical vibration responses of the adjacent building, which are induced by the vehicle–pavement coupling system, respectively, including the building mid-acceleration responses, vertical acceleration PSD, and mean vertical displacement. The mid-acceleration means of different floors can be compared in Figure 7, where it is seen that the resonance frequency is the same for the first and third floors, and that the amplitude of the first floor is bigger. It is also found that the responses of the building become stronger as the vehicle approaches it and decrease as the vehicle leaves, and the response differences between different floors gradually vanish. Because of the damping effect of the building structure, the vibration is gradually damped out.
Figure 8 gives the vertical acceleration PSD of different floors. The results show that the response peaks of the building are located near 20 Hz. This characteristic remains unchanged while the vibration accelerations decrease with increasing floor height, which reflects the energy attenuation of the wave. Figure 9 gives the mean vertical displacements of different floors and shows that the peaks of mean displacement increase as the mid-acceleration responses increase. In contrast, the variations in the response peaks increase with increasing height.
Conclusion
This article establishes an integrated numerical model for traffic-induced environmental vibration, including vibration source, propagation path, and a vibrated building. A periodic chain substructure is used to simplify the infinitely long pavement. The 2D MEM is derived to change the non-stationary random vibration into quasi-static dynamic functions in each substructure. PEM and symplectic methodology have been combined to study the dynamic behavior of the complex system. The numerical example has verified the feasibility and efficiency of the proposed method. The following conclusions can be drawn:
The periodic chain substructure for a damped vehicle–pavement system is proved to be suitable for analyzing the random responses of an adjacent building. The model truncation errors induced by artificial boundaries are avoided and, because the calculation scale is decreased, computational accuracy is enhanced.
For complex non-stationary multiple point excitation, by means of the MEM, the vehicle speed, foundation damping, and rigidity all are coupled into the element matrix, and because the system remains linear and time-independent, the computational efficiency is significantly improved.
The characteristics of building responses induced by traffic load obviously change with the distance of the vehicle from the building. The responses of different floors are affected considerably by the hysteretic damping of the building, particularly in the high-frequency region. As the pavement stiffness is strengthened around the building, the responses on this side are stronger than those on the other side.
In addition, this article focuses on developing an efficient computational method and a reasonable model for analysis, and so some assumptions have been made. Further research will be done to verify such assumptions, and the experimental data will be developed.
Footnotes
Academic Editor: Crinela Pislaru
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors are grateful for financial support from the National Natural Science Foundation (NSF) of China (grant no 11402235) and the Cardiff Advanced Chinese Engineering Centre.