
Abstract
This article proposes a self-synchronous vibrating mechanism with four unbalanced rotors driven by four hydraulic motors mounted symmetrically on two coaxial rotating beams. Analytical expressions of the steady-state response for the multi-body vibrating system are deduced. The dimensionless coupling equations of the four unbalanced rotors are derived by virtue of the averaging method of modified small parameters. The synchronization and stability criteria are deduced using the existence and stability of the zero solution for the dimensionless coupling equations of the four unbalanced rotors. The coefficients of synchronization ability are defined. By numeric analysis, effect of the dynamic parameters on the characteristics of coupling dynamics for the unbalanced rotors is discussed to determine dynamic parameter intervals of synchronization stability. Computer simulations are carried out to verify the correctness of the theoretical analysis.
Introduction
As a kind of construction machinery, the vibratory pile driver is widely used in infrastructure engineering such as urban construction, bridges, and ports. During the working process, the pile hammer drives the pile to make the pile and its surrounding soil in a state of forced vibration. The pile overcomes the resistance and gradually sinks into the soil under the action of the hammer exciting force and the gravity of the hammer and the pile. 1 The essence of a vibratory pile driver is to reduce the pile friction by vibration. 2 At present, most of the engineering vibratory pile drivers use gears to synchronize unbalanced rotors (URs) in the hammer. 3 This rigid synchronous transmission often makes mechanical structure complicated, which needs constant maintenance.
Self-synchronous phenomena of URs, caused by vibration, have opened up fresh opportunities in the vibration utilization technology. This synchronous phenomenon was defined as a property of material objects of very different natures to develop a uniform rhythm of coexistence in spite of differences in individual rhythms. 4 Using the method of direct separation of motions and the Poincare–Lyapunov small-parameter method, Blekhman proposed the synchronization theory of vibrating machines with two or more URs and has successfully solved a number of self-synchronization, such as self-synchronization of the unbalanced and planetary URs on a flatly oscillating solid body, self-synchronization of the URs on the spatially oscillating softly vibrato-isolated solid body, self-synchronization of the URs in the carrying vibrating systems with collisions of the bodies, and so on.4–8 In view of engineering applications, Chinese Scholar Wen applied such methods to develop the theories of self-synchronization of two URs in vibrating systems of circular motion, linear motion, centroid rotation motion, and spatial motion and established a branch of vibration utilization engineering.9–12
The key to develop vibrating machines with multiple URs lies in the fact that the coupling characteristics of the system and its internal law of the distribution of energy must be understood perfectly. In a single freedom vibrating system with two identical URs rotating in opposite directions, the vibrations excited by the two URs would be canceled mutually and the system was stationary. 4 The coupling characteristics of two URs in a rigid base of six freedoms were discussed in detail by the authors in Zhao et al. 13 In fact, a vibrating system with two URs has general dynamic symmetry which results in synchronization of the two URs. 14 Balthazar et al.15,16 investigated the coupling characteristics of two non-ideal sources (URs) on a flexible portal frame structure and developed four non-ideal sources through a numeric method in which self-synchronization in pre-resonance and resonance regions stemming from the interaction of system responses was also analyzed. Taking three counting-rotating URs, for example, Zhang et al. 17 discussed numerically the coupling characteristics of multiple URs on a spring-mass rigid base and synchronization regime of the system. Zhao et al. 18 proposed a new vibrating mechanism of far-resonant vibration driven by four URs, which consisted of a main rigid frame and two accessorial frigid frames and was a far-resonant vibrating system with small damping. The numerical results demonstrated that self-synchronization of the four URs stemmed from the dynamic characteristics of motion selection of the vibrating system.
In accordance with general dynamic symmetry and motion selection principle of the vibrating system, this article proposes a vibratory pile driver driven by four hydraulic motors, which can achieve self-synchronization when the system with a big coefficient of damping operates in a sub-resonance state. The rest of this article is organized as follows: the coupling equations of the four URs are derived in section “Non-dimensional coupling equations of the vibrating pile driver system,” which is followed by the criterion of synchronization and that of stability for its synchronous state in section “Synchronization of the four hydraulic motors.” Numeric discussions are given in section “Numeric analysis and computer simulation” and conclusions are made finally.
Non-dimensional coupling equations of the vibrating pile driver system
Structure of the considered vibrating pile driver
Figure 1 shows the structure of the four-hydraulic motor vibrating pile driver, which consists of pile gripper 1, two beams 2, four hydraulic motors with URs 3, axis 4, upper shell 5, screw nuts 6, and springs 7. There are two hydraulic motors (UR) installed on each beam rotating about axis 4 and there is an angle

The structure of exciters in four-hydraulic-motor self-synchronization vibrating pile driver.

Dynamic model of the self-synchronization vibrating pile driver system: (a) dynamic model of the system and (b) dynamic model of vibration excitors.
Choosing

where
When the system operates in a steady state, the phase of the UR ij leads φ by

Torque of a hydraulic motor
Figure 3 shows the schematic diagram of hydraulic system for the vibrating pile driver, which includes four hydraulic circuits. Each circuit consists of an asynchronous motor, a gear bump, a magnetic exchange valve, and a hydraulic motor. The angular velocity relation between the asynchronous motor and the hydraulic motor can be expressed as follows 20


Hydraulic system of the vibrating pile driver system: 1-asynchronous motor; 2-hydraulic bump; 3-overflow valve; 4-filter; 5-one-way valve; 6-Magnetic Exchange Valve; 7-hydraulic motor and 8-cooler.
According to Zhao et al.,
13
the electromagnetic torque of an asynchronous motor operating steadily at the angular velocity,

The driving torque of the bump and the output torque of the hydraulic motor are expressed as follows


Because

Considering equation (3) and inserting equation (7) into equation (6) yield

Non-dimensional coupling equation of the four exciters
It is assumed that

The symbols in equation (9) are listed in Appendix 2.
Assuming

then we have

Differentiating x, y, z and

The symbols in equation (12) are listed in Appendix 3. For each hydraulic motor, its output torque in equation (8) can be expressed as follows

The moments of inertia of the motors are much less than the moments of inertia of the URs. Hence,

with




Equation (14) describes the coupling relation of four URs and is called the non-dimensional coupling equation of the four URs, where matrix
Synchronization of the four hydraulic motors
Synchronization criterion
When the system reaches the synchronization, the average coefficient of angular velocity instantaneous fluctuation in a single period of the URs is 0. Assuming that




Subtracting equation (15) from equation (16), we obtain

Subtracting equation (17) from equation (18), we obtain

Subtracting the sum of equations (17) and (18) from that of equations (15) and (16), we obtain

Summing up equations (15)–(18), we obtain

If the parameters of the vibrating system can satisfy a certain condition, equations (19)–(22) can be solved for

where
The conditions of implementing the synchronization of the four URs can be expressed as follows

Stability of synchronization
When

where
Obviously,


If
Linearizing equation (12) around




where
We can obtain the following equations through the transition of equations (27)–(30)




Taking

According to

The zero solutions of equation (36) are stable only if all the roots in equation (37) have the negative real parts. According to the Routh–Hurwitz stability criterion, we can find that the parameters in equation (37) should satisfy

with
If
In engineering, the parameters of the four hydraulic circuits in Figure 3 are usually chosen to be similar. Hence, equation (26) can be expressed as follows

We can prove that if the system satisfies the Lyapunov stability criterion equation (38), then the system also satisfies the Routh–Hurwitz stability criterion. Therefore, when the parameters of the hydraulic circuits in Figure 3 are similar, the stability criterion of synchronization is equation (39).
Numeric analysis and computer simulation
Ability of synchronization and stability
In order to expediently describe the ability of synchronization of the mechanism proposed in this article, we define the three coefficients of synchronous ability as follows 18


When the system is working, the damping of the pile and the soil, z-freedom, is larger, while the dumping of the other freedoms is surly the type of spring-mass. So we assume that
The variations of the coefficients of synchronization ability and the phase differences with the mass ratio

The relations between coefficients of synchronous ability, phase difference and mass ratio rmz.
The variations of the coefficients of synchronization ability and the phase differences with the mass ratio
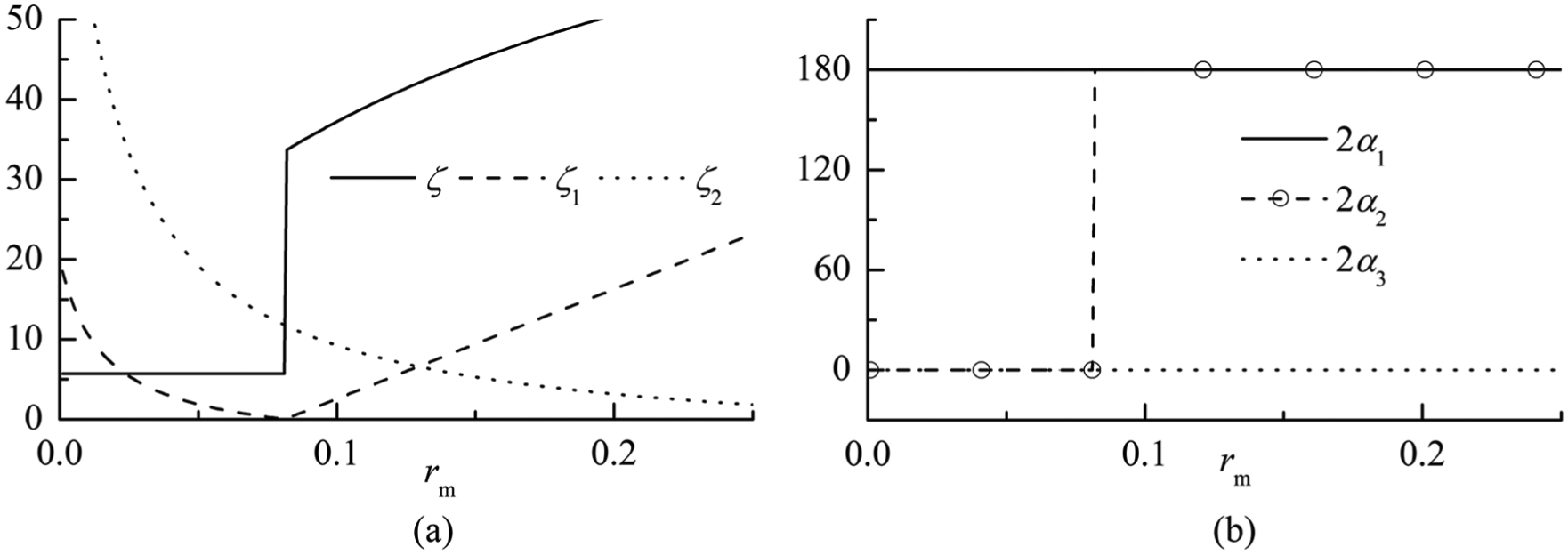
The relations between coefficients of synchronous ability, phase difference and mass ratio rm.
The variations of the coefficients of synchronization ability and the phase differences with the length ratio
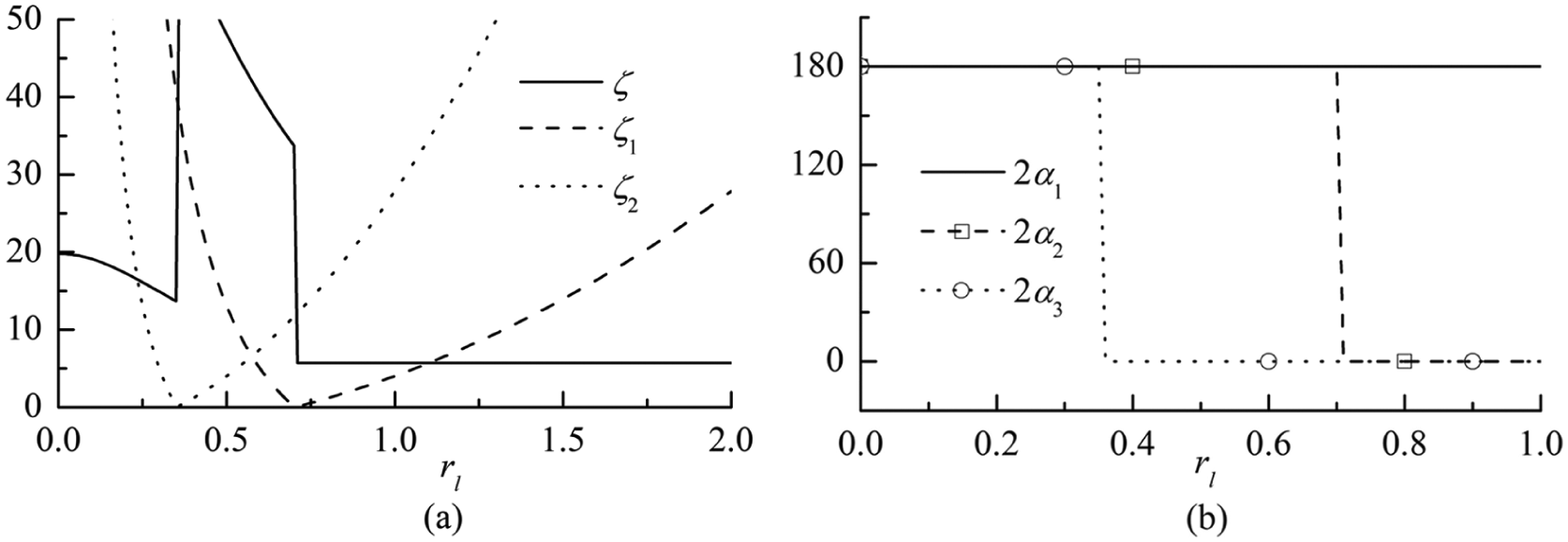
The relations between coefficients of synchronous ability, phase difference and displacement ratio rl.
The variations of the stability parameters

The ability of vibrating system with different amplitudes.
The variations of the phase differences and the rotational speed of hydraulic motors with the capacity ratio are illustrated in Figure 8. As illustrated in Figure 8, the phase differences remain unchanged with the increase in the capacity ratio

The relations between phase difference, speed of hydraulic motor and capacity ratio.
Computer simulation
In order to verify the above investigations, computer simulation for the hydraulic motors with different parameters is carried out. Using the fourth-order Runge–Kutta method, we develop the numeric algorithm with the MATLAB software, which is similar to that of the vibrating system with two URs described in Zhao et al.
21
The parameters of the system are assumed that
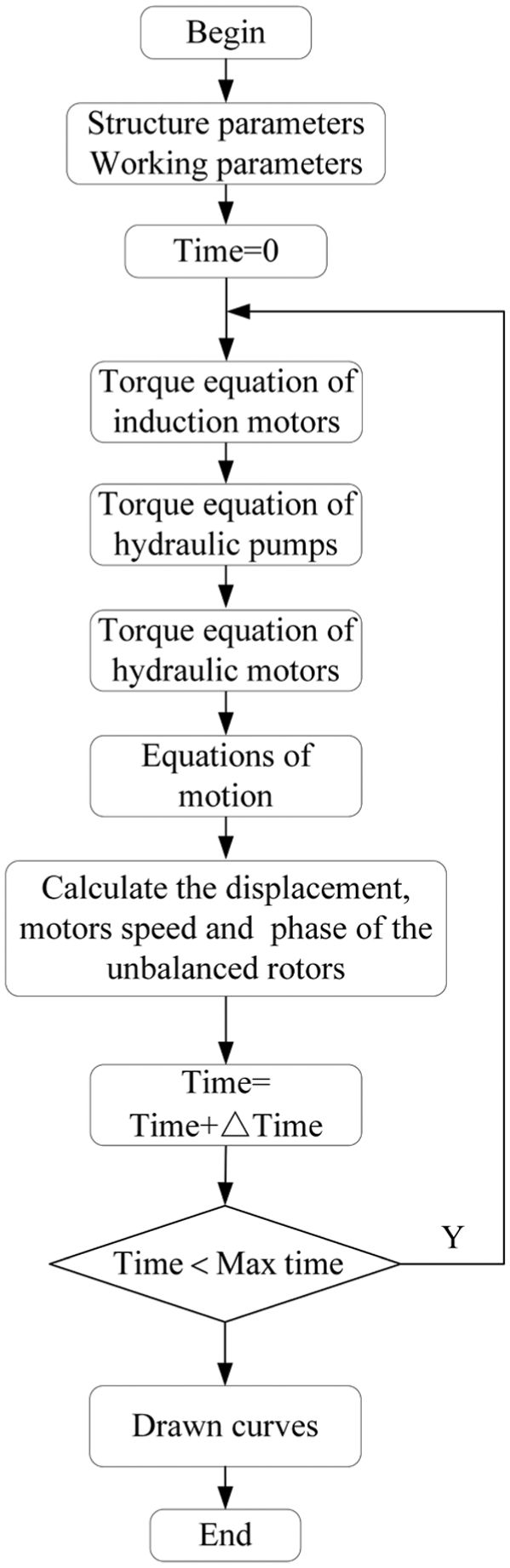
Block diagram of simulation algorithm.

Results of computer simulation for vibrating pile driver with four hydraulic motors rotating in the same directioin: (a)~(f) displacements in x, y, z, z, ψ1, ψ2 direction; (g) rotational speeds of the four hydraulic motors; (h) phase differences between every two eccentric rotors.
Conclusion
From the theoretical investigation and numeric analysis given in the above sections, the following remarks can be stressed.
A new vibratory pile driver with four hydraulic motors, which can implement self-synchronization, is proposed. The hydraulic system of vibrating pile driver is designed and the mathematical model of the electric motor-pump-hydraulic motor drive system in quasi-steady-state operation is derived.
The dimensionless coupling equations of the four URs are deduced by virtue of the modified average method of small parameters. Based on the existence and stability of the zero solution for the dimensionless coupling equations, the synchronization criterion and the stability criterion are derived. The numeric results demonstrate that the synchronization of the four URs is stable all the time.
No matter how much the mass of
Footnotes
Appendix 1
Appendix 2
Appendix 3
Academic Editor: Chuanzeng Zhang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Foundation of China (Grant No. 51375081) and Program of Innovative Team for Liaoning Province Department of Education (Grant No. LT2014006).