
Abstract
Evaluating comprehensive performance of assisted parking system has been a very important issue for car companies for years, because the overall performance of assisted parking system directly influences car intellectualization and customers’ degree of satisfaction. Therefore, this article proposes two-tuple linguistic analytic hierarchy process to evaluate assisted parking system so as to avoid information loss during the processes of evaluation integration. The performance evaluation attributes for assisted parking system are established initially. Subsequently, the information entropy theory is proposed to improve the evaluation attribute weight determined by analytic hierarchy process for the influencing factors of the randomness in parking test process. Furthermore, the evaluation attribute measure values of comprehensive performance are calculated and the assisted parking system evaluation results are obtained with ordered weighted averaging operator. Finally, numerical examples of vehicle types equipped with eight different assisted parking systems and computational results are presented.
Keywords
Introduction
With the rapid growth of car ownership, “parking difficulty” problem in modern cities is more and more notable. Parking operation in parking areas near crowded and narrow urban roads and community roads is not easy for many drivers. Therefore, assisted parking driving technology has become one of the research hotspots in car engineering field. The car makers paying much attention to assisted parking system successively launch their own assisted parking driving system.1,2
In recent years, the advanced technologies relating to parking drew much attention from people and assisted parking driving technology has gradually won people’s favor. The advanced assisted parking technology is leading to subtle changes in the external environment of market. The investigation results from foreign car consulting companies show that customers begin to raise higher requirements for car intellectualization and prefer to spend more money on the cars with assisted parking system.3,4 The overall performance of assisted parking system directly influences customers’ degree of satisfaction, and the assessment of the overall performance is a multi-level, multi-factor, and multi-objective comprehensive result;5,6 the overall performance of assisted parking system is decided by many factors and the results conforming to the reality can be obtained only by analyzing comprehensively different factors. 7 Therefore, the influencing factors should be summarized by levels through the comprehensive analysis of the existing assisted parking systems and combined with mathematical methods to determine comprehensive evaluation results. An effective scientific basis is needed for the improvement of the overall performance of new assisted parking system.8–10 Now, there is still a blank in the research on the comprehensive evaluation methods of the overall performance of assisted parking system.
Hierarchy analysis method is currently a relatively mature weight calculation method, applied in many fields. It was put forward by American operational research expert TL Saaty 11 in early 1980s. It regards a complex multi-target decision-making problem as a system and divides one big target into many small targets or principles to divide attributes into many levels and calculate single hierarchical arrangement and general ranking by qualitative fuzzy quantifying method. 12 But traditional hierarchy analysis method has obvious disadvantages, namely, its measurement scaling method is a deterministic method having not taken the thinking fuzziness of evaluation personnel into account, which will influence the accuracy of the evaluation results. 13
The expression of traditional fuzzy linguistic preference is divided into fuzzy number method and language scaling method, both of which have certain limitations, namely, the group evaluation information obtained by collecting individual evaluation information generally. But they cannot be expressed by the single linguistic phrase obtained from the predefined semantic evaluation and need an approximate process, which leads to the loss of information and the inaccuracy of the collected results. For that, Spanish scholars Herrera and Martinez 14 raised binary language analysis method relating to language information collection in 2000 to well overcome the disadvantages of previous research methods. The method regards language phrases as the continuous variables within its domain of definition and can use the binary form of one phrase and the value of one real number to express all information obtained after language evaluation information integrity, which effectively avoids the information loss and distortion happening in language evaluation information aggregation and calculation. It is superior to other language information processing methods in calculation accuracy and reliability.15,16 According to the above analysis, the comparison of fuzzy number, language scaling, two-tuple linguistic in expression accuracy, calculation simplicity, and information loss is shown in Table 1.17,18
Representation comparison of different fuzzy linguistic preferences.

Because the weight coefficient determined by hierarchy analysis method has not considered the randomness in parking experiment process, the article raises an information entropy–based method to improve the weight coefficient determined by hierarchy analysis method. Entropy was first put forward by Shannon in 1948, generally called information entropy or Shannon entropy. Information entropy is an uncertain measurement. 19 The bigger the information, the higher the uncertainty of information and the lower the usefulness value; otherwise, the smaller the information entropy, the lower the uncertainty and the higher the usefulness value of information. Information entropy has been applied to almost all subjects and plays an important role in modern power system and ergodic theory.20,21 Its application in natural science, 22 social science, 23 and management science becomes more and more mature.
The article gives subjective assessment (qualitative) and objective assessment (quantitative) to the assisted parking systems of different vehicle types according to many drivers’ experiment evaluation and builds structural models of analysis methods and judgment matrix. In order to overcome the disadvantages of subjective assessment, it puts forward the two-tuple linguistic theory-based subjective assessment method. Given the randomness of the parking experiment results, it adopts information entropy theory to determine the weight of attributes. The measure values of attributes are obtained by calculating the binary semantic expert evaluation values. Then, the assessment results of the performance of assisted parking system of different vehicle types are obtained by calculating the measure values of attributes with ordered weighted averaging (OWA) operator. The differences in the performance of the assisted parking systems of different vehicle types are differentiated by analyzing the assessment results to provide a reference basis for improving the performance of different assisted parking systems or adjusting technical scheme.
Preliminaries
Basic principles and prospect of assisted parking system
The operating principle of assisted parking system is to measure the distance and angle between car and neighboring barriers with vehicular distance detection equipment and then to calculate the procedures of parking with vehicular controller which will be combined with car speed to change the driving direction of car. 24 Drivers only need to control the driving speed of cars, as shown in Figure 1. Assisted parking system is the current research hotspot in car driving-assisted technology field and involves the knowledge about electromagnetism, environment-aware sensor, signal processing, information fusion, model identification, automatic control and electric power steering direction, and automotive electronics. 25 With the constant improvement of popularity rate of car, there is less and less space for parking on urban roads, but assisted parking system provides a great help for solving the parking in a narrow space, so it has a wide application space in the future. 26 Refer to Figures 2 and 3 for the schematic diagrams of parking route design and parking effects.

Assisted parking system work process.

Schematic of the path planning.

Schematic of parking evaluating results.
Definition and computing of two-tuple linguistics information
Two-tuple linguistics adopts a binary group
Definition 1
Let

Definition 2
Let
where
Definition 3
Let

Definition 4
Let
If k < l, then
If k = l, then, if if if
Definition 5
Assume

Definition 6
Assume

Among these,

Among these,
Among these, in different cases, the corresponding parameters of the operator
Definition 7
Assume
Among these,
Evaluation model of assisted parking system and methodologies for computing
Building evaluation model of assisted parking system
According to experimental experience from plenty of assisted parking real vehicle tests, as well as considering V-Charge project (Automated Valet Parking and Charging for e-Mobility Collaborative Project) and ASSESS project (Assessment of Integrated Vehicle Safety Systems for improved vehicle safety), it puts forward selecting 18 representative attributes (secondary attributes) from initial search performance A1, parking processing performance A2, parking effects A3, and drivers’ feeling in parking A4 (primary attributes) to build comprehensive performance evaluation attribute system of assisted parking system, as shown in Figure 4.
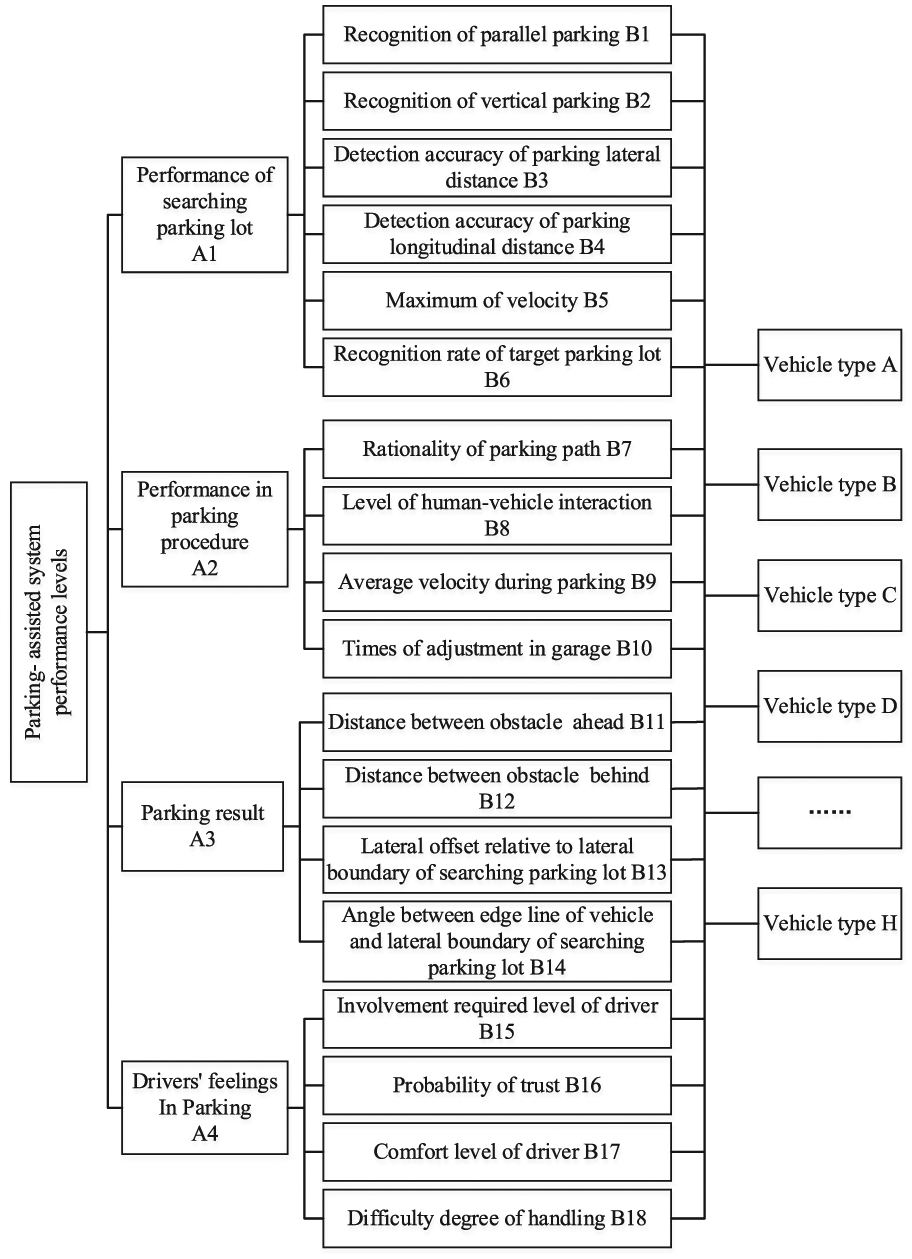
Evaluation attribute system of assisted parking system comprehensive performance.
Some supplements for V-Charge project are given as follows. The objective of this project is to develop a smart car system that allows for autonomous driving in designated areas (e.g. valet parking, park and ride) and can offer advanced driver support in urban environments. The final goal in 4 years is the demonstration and implementation of a fully operational future car system including autonomous local transportation, valet parking, and battery charging on the campus of ETH Zurich and TU Braunschweig. The envisioned key contribution is the development of safe and fully autonomous driving in city-like environments using only low-cost Global Positioning System (GPS), camera images, and ultrasonic sensors.
Similarly, some details about ASSESS project are given as follows. ASSESS mobilizes the European research community and car industry to develop a relevant set of test and assessment methods applicable to a wide range of integrated vehicle safety systems including parking system. Methods will be developed for driver behavioral aspects, pre crash sensing performance, and crash performance under conditions influenced by pre crash driver and vehicle actions. The gained know-how will be implemented in proposals for test and assessment procedures that will be evaluated on the basis of actual systems currently offered to the market.
Methodologies for computing
Step 1. Experiment of assisted parking systems with subjective assessment (qualitative) and objective assessment (quantitative). Three experienced car testers conduct subjective and objective assessment on eight vehicle types with different assisted parking systems. The assessment data are obtained by E1–E3 tester. Among these, B1–B2, B7–B8, and B15–B18 belong to subjective qualitative assessment attributes, in two-tuple linguistic form S = {s0 = extremely bad, s1 = very bad, s2 = worse, s3 = bad, s4 = common, s5 = good, s6 = better, s7 = very good, s8 = extremely good}; B3–B6 and B9–B14 belong to objective quantitative assessment attributes and they are provided by actual experiment data; B3 and B10–B14 are negative attributes, namely, the bigger the data, the worse the attribute, and other attributes are positive; the data of B11 and B12 are obtained after calculation, namely, the absolute value of the differences between them and standard value 80 cm. Step 1.1. Attribute standardization. Attributes according to usefulness coefficients. If di is adopted, the specific forms of di = di(xi), i = 1, 2, 3,…, m are various. For different attributes, the following two linear expressions are provided. Positive attributes
Negative attributes


Step 2. The determination of weighted coefficient of judgment attributes.
30
Step 2.1. The establishment of judgment matrix using analytic hierarchy process (AHP). According to the literatures and specifications about parking, analysis of parking test results and engineering analogy analysis, determine the importance of the any two attributes and elaborate on the building method of judgment matrix to it. The judgment matrix of pairwise comparison according to the scaling meaning is given in Table 2. Step 2.2. Judgment matrix consistency examination and examination results. In the calculation of weight coefficients, the consistency of judgment matrix A needs to be examined with the specific methods as follows: Calculate the maximum characteristic value of judgment matrix
Among these, Calculate consistency attribute
Random consistent attributes RI is obtained from sheet, as shown in Table 3. Calculate consistency rate


Judgment matrix scale and its meaning.

Mean random consistency attribute table.

The steps of AHP approach for assisted parking system are shown in Figure 5.

AHP approach for assisted parking system.
Step 2.3. The determination and improvement of weight. Because the weight coefficient determined by hierarchy analysis method has not considered the randomness in parking experiment process, the article raises an information entropy–based method to improve the weight coefficient determined by hierarchy analysis method.
Assume there is m assisted parking system awaiting to be assessed and the overall performance of each assisted parking system is assessed by n factors, the weight of each factor can be obtained by calculating the information entropy of each factor to evaluate the overall performance of each assisted parking system with the specific procedures as follows: 31
Normalize

Calculate the entropy

The information usefulness value of one attribute depends on the difference between the information entropy

The higher the usefulness value of one attribute, the greater its importance for evaluation and the bigger the attribute weight. The entropy weight of jth attribute is

Finally, the value of comprehensive weight is obtained by calculating the entropy weights of attributes and combining the weight determined by AHP. Let

Step 3. The evaluation results and analysis of the overall performance of assisted parking system. Step 3.1. Building two-tuple linguistics-based measure model. First, build two-tuple linguistic matrix and transform all quantitative data in original assessment data into two-tuple linguistic form. Conduct same processing to the original assessment data obtained from E2 and E3 assisted parking system testers. The calculation formula is as follows
Among these, Step 3.2. Calculate the measure value. Calculate the measure value of the primary attributes provided by each tester. Calculate the corresponding measure value according to formula (4). Among these, Step 3.3. Calculate the comprehensive measure values of A-H. Determine position weight vector. The article chooses (a, b) = (0.3, 0.8) as the corresponding fuzzy quantifier parameter. The number of testers is 3, namely, m = 3. The position weight vector relating to OWA operator can be figured out according to formulas (6) and (7), namely
Calculate comprehensive measure value. Let i = 1; this moment, Calculating the overall scores of different vehicle types. Calculate the overall scores according to



Figure 6 shows the steps of the proposed approach under three main sections (i.e. AHP approach, entropy approach, and T-OWA approach).

Entropy weight extended AHP with two-tuple approach for assisted parking system.
Case study and results’ analysis
In this case, the proposed method is applied to evaluate the comprehensive performance of different assisted parking systems. Because the different types of vehicles directly affect the overall performance of assisted parking. For example, different kinds and models of sensors used to detect parking lot will affect the performance of searching parking lot (A1); parking controller about the path planning control strategy will affect the performance in parking procedure (A2); vehicle size will absolutely influence parking result (A3); vehicle different engines will affect drivers’ feelings in parking (A4). Therefore, in this article, the above factors are considered. Different parameters and vehicle types are selected in car market. The corresponding relations between vehicle type A-H and actual vehicle types are shown in Table 4. The actual test of assisted parking system is shown in Figure 7.
Actual corresponding vehicle types.


Actual test of assisted parking system.
Step 1. The assessment data are obtained by E1–E3 tester, make data dimensionless shown in Tables 5–7. Step 1.1.Quantitative attributes units are shown in Table 8.
Step 2. The determination of weight coefficient of judgment attributes.
Raw data of E1 test member for evaluating eight vehicle types.

Raw data of E2 test member for evaluating eight vehicle types.

Raw data of E3 test member for evaluating eight vehicle types.

Quantitative attributes and units.

Attributes with “(-)” mean cost ones.
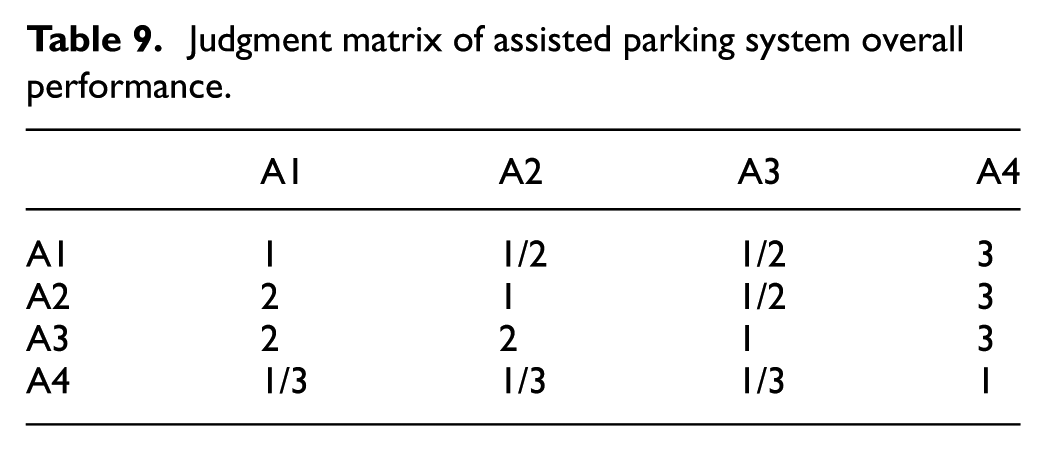
Judgment matrix of assisted parking system overall performance.
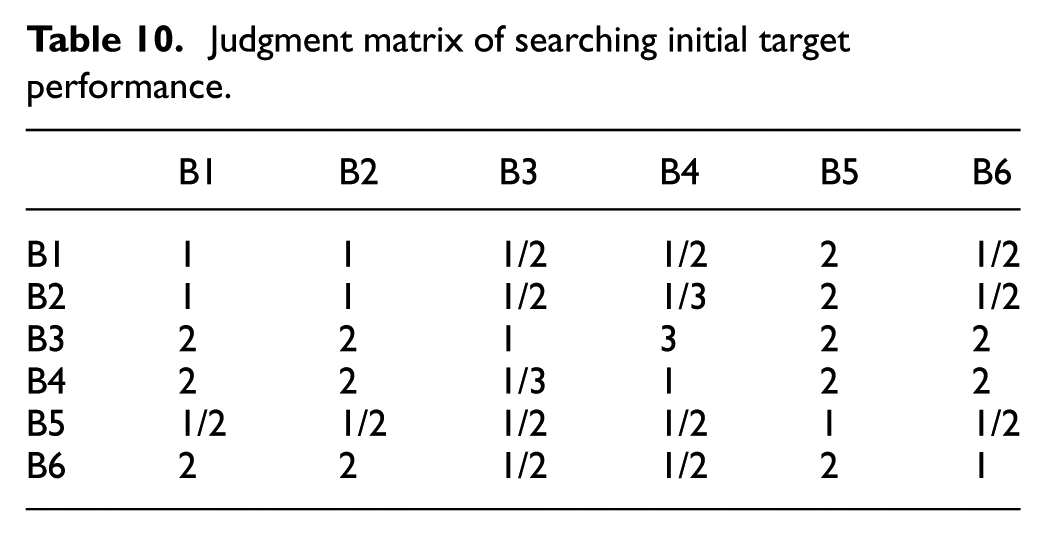
Judgment matrix of searching initial target performance.
Judgment matrix of parking procedure performance.

Judgment matrix of parking effect.

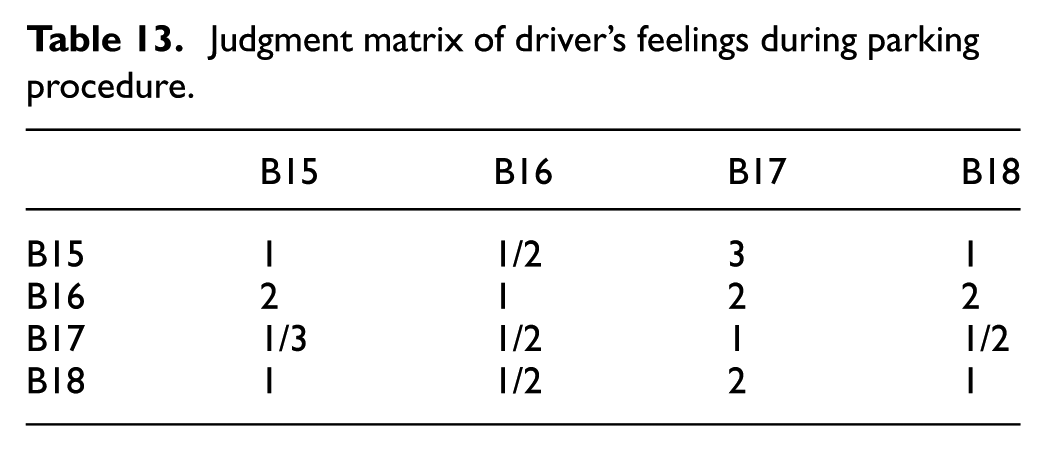
Judgment matrix of driver’s feelings during parking procedure.
According to Table 14, the consistence rates of judgment matrixes are all lower than 0.1 and pass consistency test.
Each judgment matrix eigenvalues and maximum consistence rates’ calculation results.

Step 2.3. The determination and improvement of weight.
The weight of primary attributes for the overall performance of assisted parking system and the weight of secondary attributes for the overall performance of assisted parking system are shown in Figures 8 and 9, respectively.

Primary attributes with respect to the assisted parking system performance overall weight.

Secondary attributes with respect to the assisted parking system performance overall weight.
Step 3. The evaluation results and analysis of the overall performance of assisted parking system. Step 3.1. Building two-tuple linguistics-based measure model.
Due to the limit of article length, there is only the list of tester’s assessment values for vehicle type A, as shown in Table 15.
Evaluation value of vehicle type A from test members.
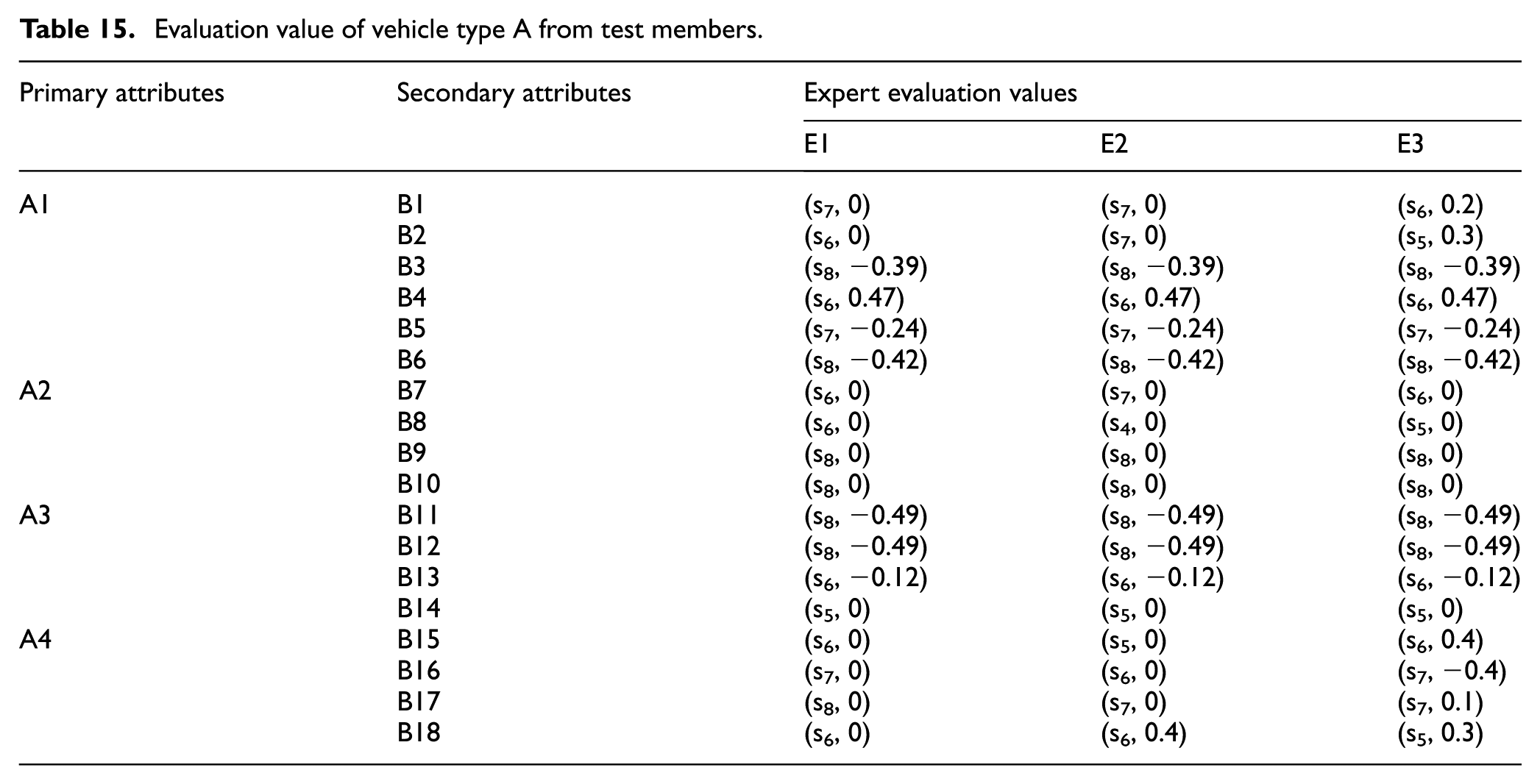
Step 3.2. Calculate the measure value. 1. Calculate the measure value of the primary attributes provided by each tester. Calculate the corresponding measure value according to formula (4) with the calculation results shown in Table 16. Among these, 2. Calculate comprehensive measure value. Rank
Measure values of primary attributes.

Weights of secondary attributes corresponding to primary attributes.


Radar chart of assisted parking system overall performance evaluation.
3. Calculating the overall scores of different car models. Calculate the overall scores according to

Evaluation score histogram of each vehicle assisted parking system overall performance.
Results’ analysis
It can be seen from the weights in Figure 8, parking result (A3) is more important than the other three attributes with the weight of 0.514698; performance in parking procedure (A2) is the second most important attribute with the weight of 0.334763; performance of searching parking lot (A1) and drivers’ feelings in parking (A4) rank the last but one and the last with the weights of 0.127061 and 0.023478. Compared with performance of searching parking lot (A1), detection accuracy of parking longitudinal distance (B4), detection accuracy of parking lateral distance (B3), and maximum of velocity (B5) in secondary attributes are more important than other attributes, respectively, having the weight of 0.061127, 0.042701, and 0.038444. Compared with performance in parking procedure (A2), times of adjustment in garage (B10) is the most important having the weight of 0.118690. Compared with parking result (A3), the importance of angle between edge line of vehicle and lateral boundary of searching parking lot (B14) is obviously more important than the other three attributes having the weight of 0.221576, lateral offset relative to lateral boundary of searching parking lot (B13) is the second most important, and the importance of distance between obstacle ahead (B11) and distance between obstacle behind (B12) is similar. Compared with drivers’ feelings in parking (A4), probability of trust (B16) and involvement required level of driver (B15) are relatively important, respectively, with the weights of 0.029674 and 0.021499.
According to the total points of the overall performance evaluation of assisted parking system of different vehicle types in Figure 11, vehicle type F gets the highest points (7.74), namely, vehicle type F has the best overall performance of assisted parking system, and its subjective assessment belongs to the level slightly lower than “extremely good” according to the definition of two-tuple linguistics; vehicle types A, C, and E have the second highest points, followed by vehicle type D; vehicle types B, G, and H have approximate points much lower than vehicle type F. Vehicle type H has the lowest points, only 3.23 points, which has the worst overall performance of assisted parking system and whose subjective assessment belongs to the level slightly better than “bad.”
It is necessary to note that 4 points, namely, the common level in two-tuple linguistics, for mature assisted parking system is the critical value of the overall performance of assisted parking system. If lower than 4 points, it can be deemed that the assisted parking system has critical defects and needs to be redesigned or improved.
It can be seen from radar chart that vehicle types G and H have low points in parking result (A3), lower than 4 points, which means there are major design defects for the two vehicle types in parking result (A3) and redesign is needed to improve the performance in this aspect. Besides, vehicle types B, G, and H also have poor performance in parking procedure (A2), approximating 4 points and vehicle type B has good performance in the other aspects, so the focus can be put on the improvement of parking result (A3) and performance in parking procedure (A2) to improve the overall performance.
Vehicle type F’s assisted parking system has the best overall performance. But, compared with other three aspects, there is still space to improve in drivers’ feelings in parking (A4).
The total points of vehicle types A, C, and E all reach more than 6 points, namely, at a “better” level. For them, the performance attributes with relatively high weight coefficient and the attributes in an obviously inferior position can be first improved to improve the overall performance of assisted parking system.
Conclusion
Aiming at the problem that assisted parking system lacks complete and comprehensive performance evaluation method, and based on building comprehensive performance evaluation attribute system of assisted parking system, two-tuple linguistic analytic hierarchy process (2-TLAHP) is used to determine the weight of assessment attributes and two-tuple linguistic OWA operator is used to obtain the overall scores of assisted parking system of different vehicle types.
Aiming at the problem that the weight determined by hierarchy analysis method has not considered the randomness in parking experiment process, the traditional hierarchy analysis method determining weight is improved by raising an information entropy theory-based method.
The improvement direction of assisted parking system is raised through the analysis of the determined weight and parking evaluation experiment results to provide theoretical reference for the evaluation methods of the overall performance of assisted parking system.
Footnotes
Acknowledgements
The authors would also like to thank China Jiangsu University and USA California State University, Fresno.
Academic Editor: ZW Zhong
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was financially supported by The National Natural Science Fund (No. U1564201) and the CEEUSRO Innovative Capital Project in Science-Tech Bureau of Jiangsu Province (No. BY2012173). J.M. thanks Fresno for the support as a visiting scholar.