
Abstract
The iterative learning control for aircraft engine above idle state is studied. An approach combining the proportional integral iterative learning with the traditional proportional integral derivative controller is proposed and then this hybrid iterative learning controller is constructed to control the speed of three typical engine models. In the simulation study, the proposed method is applied to the nonlinear component level engine model, state variable engine model, and linear parameter-varying engine model; the results show that the performance of the proposed hybrid iterative learning controller is much better than the traditional proportional integral derivative controller.
Introduction
The modern aircraft engine is a complicated thermomechanical system which works in the conditions of high temperature, high stress, and variable load; therefore, it is difficult to control such plant which belongs to strongly nonlinear, complex, multivariable time-varying systems.
1
To solve this problem, the common approach is splitting the flight envelop into different operating points; thus, the approximated linear models at each operating point are employed in aero-engine controller, such as finite impulse response model
2
or small perturbation state space model.2–4 Consequently, traditional linear control methods, such as
Iterative learning control is a branch of the intelligent control, and the control input is modified by repeated repetition to achieve the goal that desired trajectory is fully tracked by the output signal. 9 Like the human learning process, the control input of the last control process and the deviation output of the system are recorded by the system, the current control input of the system is generated by the iterative learning algorithm with process repeated continuously, and the desired signal is gradually followed or fully tracked by the output signal in a given time.
In 1974, the iterative learning was first proposed by Edwards. Then, in 1978, the basic idea of iterative learning was formally put forward by Uchiyamat, 9 but the idea did not attract people’s attention. In 1984, Arimoto et al. 10 researched the iterative learning system in depth and put forward the practical algorithm, and iterative learning thought has been further improved and developed, which has aroused wide concern.
Over the past 30 years, the theory of iterative learning control has made great progress, a series of works on the idea of iterative learning control were published by H Lin and L Wang, 11 M Sun and B Huang, 12 and S Yu et al., 13 and iterative learning was further explored and illustrated in detail. In the aspects of convergence, stability, robustness, initial value problem, analysis method, and algorithm implementation, the iterative learning had made great achievements. Moreover, the combination of iterative learning and other control methods, such as fuzzy control, neural network control, and adaptive control, also has achieved success.
At present, the PID iterative learning algorithm is mainly focused on the PID-type learning law, which includes the P type, the D type, the proportional integral (PI) type, the proportional derivative (PD) type, and the PID-type learning law. Among them, the PID-type learning law is most popular. PID-type learning law is used as a template; with different control plants, the PID-type iterative learning law has made a lot of practical improvements. In the work by S Yu et al., 13 the combination of fuzzy control and PID-type iterative learning control makes the learning gain of original system can be adjusted according to requirements, and it has been applied to the electro hydraulic servo control system. The experiments show that the idea of fuzzy control is applied to the iterative learning control system, and the performance index of the system is improved greatly.14,15
A study on applying iterative learning control to the aircraft engine control system above idle is carried out; the hybrid iterative learning controller scheme is employed to control the rotating speed of three kinds of engine models. In the simulation study, the proposed method is applied to the nonlinear component level engine model, state variable engine model, and linear parameter-varying (LPV) engine model; the results show that the performance of the proposed hybrid iterative learning controller is much better than the traditional PID controller.
PI-type iterative learning control method
PI-type iterative learning control method
Considering a continuous model of the aircraft engine control system, which is shown as equation (1)

The output state of the system after k iterations could be shown as equation (2)

Output deviation of the system is presented as equation (3)

Within the specified time
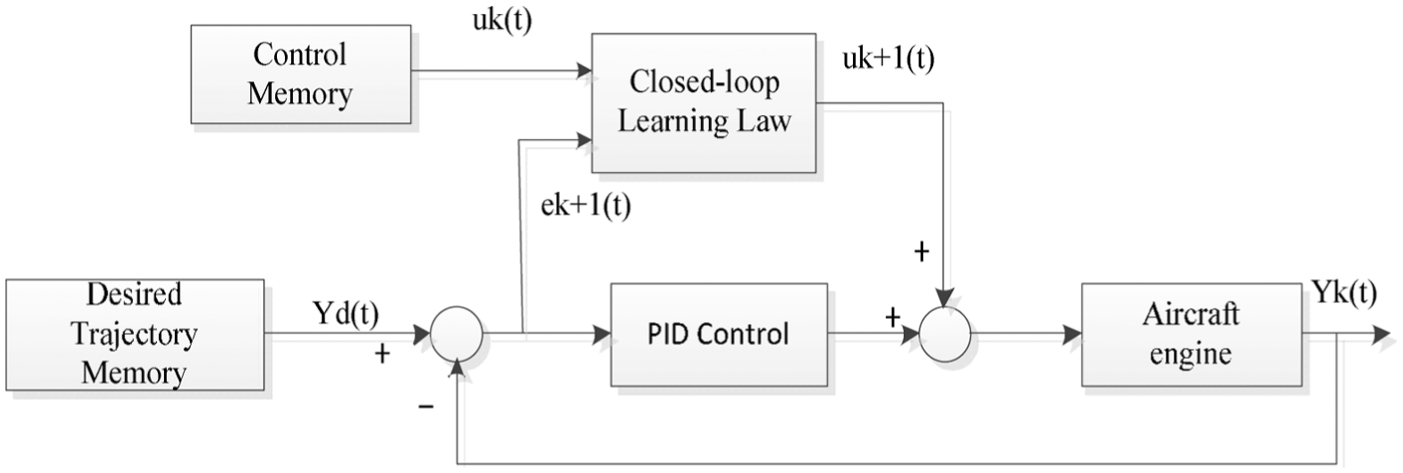
The iterative learning algorithm can be usually classified into two categories: open-loop iterative learning law and closed-loop iterative learning law. In the open-loop iterative learning law, the current control variable of the system is obtained by the output deviation of the system last running. In the closed-loop iterative learning law, the current control variable is obtained by the current output deviation of the system. In the proposed approach, closed-loop iterative learning law is adopted, which can be generally formulated by equation (4)

The basic structure of the closed-loop iterative learning law is shown in Figure 1. According to Figure 1, the current control variable

Structure diagram of closed-loop iterative learning.
Within the time interval
At
At
Check the stop condition of the iteration. When
The proposed method includes two parts, the conventional PI control and the closed-loop iterative learning control, so this approach is named hybrid iterative learning control. The schematic diagram of proposed hybrid iterative learning controller is shown in Figure 2.
Structure diagram of hybrid iterative learning controller.
The PI-type learning law is used as the closed-loop-type learning law in this section

In general, the goal of aircraft engine control is to obtain the corresponding desired thrust for the different flight tasks. However, the engine thrust could not be measured directly; thus, the rotating speed is often used as the controlled variable for the actual thrust and is approximately in direct proportion to third power of its rotating speed. In the following simulation above idle state for hybrid iterative learning control scheme, three types of engine models are utilized as the control plants, and two work points for a nonlinear component level model and two work points for the state variable model, and a fairly wide range of the LPV model is verified by the proposed approach; the results show its better performance than the conventional PI method in the aircraft engine control above idle state.
Hybrid iterative learning control based on nonlinear model
The controlled plant in Figure 3 is the dynamic link library (DLL) model of the aircraft engine DLL; the model is a nonlinear component level model which is built via the object-oriented programming method. Based on the structure of aircraft engine, a class which contains the important parts of the engine is defined. For example, for a turbofan engine, an engine class is predefined which have inlet, turbofan, compressor, combustion chamber, turbine, nozzle, and so on. Meanwhile, some auxiliary functions or routines which are necessary for running the engine model are also built. When importing the component parameters to this class, the nonlinear component level model of this specific engine is ready; this model is also easy to be called from the MATLAB/Simulink environment.
16
The method is easily realized, reproducible, and applicable, a large amount of manpower and material resources can be reduced by using it.

Simulation structure diagram of hybrid iterative learning system.
Hybrid iterative learning control based on state variable model
A small perturbation state variable model of a turbofan engine is also employed in the simulation, and the work point of this model at the stable point

State quantity
The small perturbation and the fitting method are applied to solve the state variable model at the above stable point and then the control model of the aircraft engine at the stable point is established in MATLAB.
The iterative learning module in the hybrid iterative learning is still a PI iterative learning law. The structure of the control system in MATLAB is presented in Figure 4.

Hybrid iterative learning control state variable model simulation.
Hybrid iterative learning control based on LPV model
The LPV system is a time-varying system, and the coefficient matrix of the state space equation is a determined function whose certain time-varying parameters are measurable. 17 The LPV model can describe not only a steady-state point but also the continuous state point of a certain state interval, and the defect that a conventional linear model can only describe a single state point is compensated. The LPV model of the aircraft engine constructed in MATLAB is presented in Figure 5, and u is the input of the control system and y is the output signal of LPV model. The proposed approach could be verified whether it is efficient for control of the aircraft engine in a pretty wide work range through this simulation.
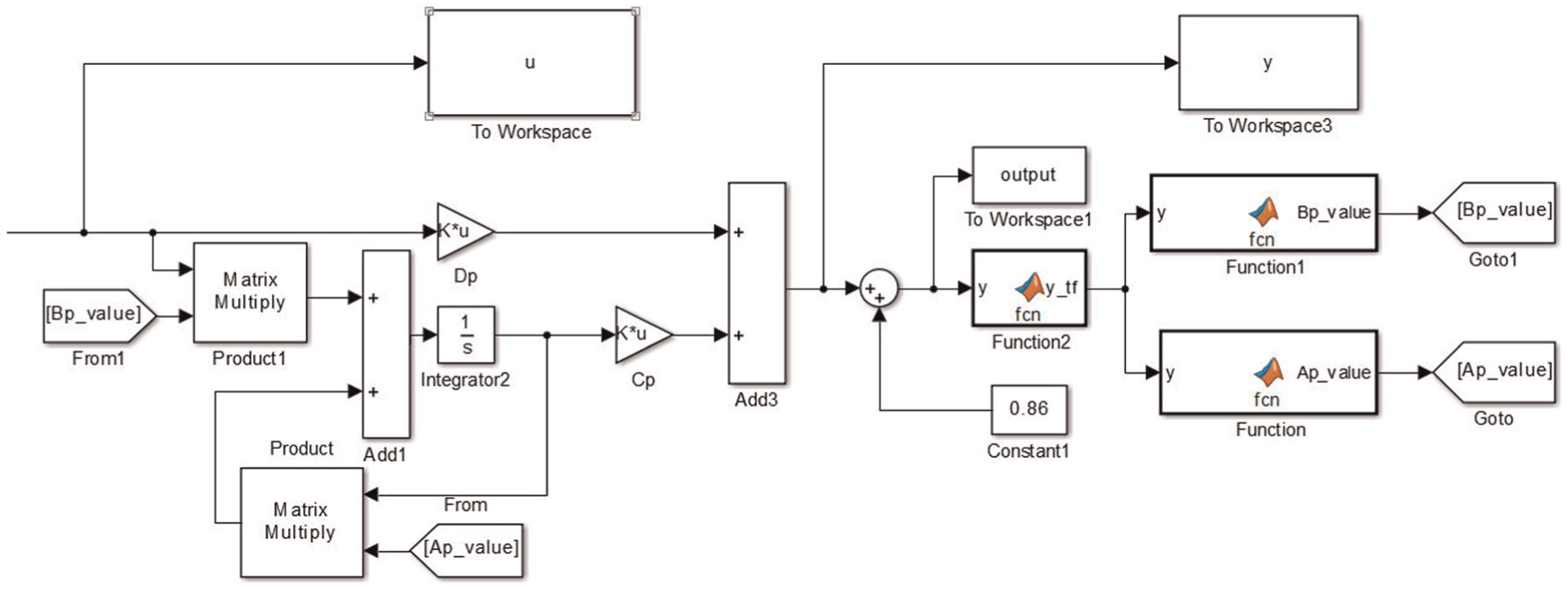
LPV model of aircraft engine.
Simulation is shown in Figure 6,
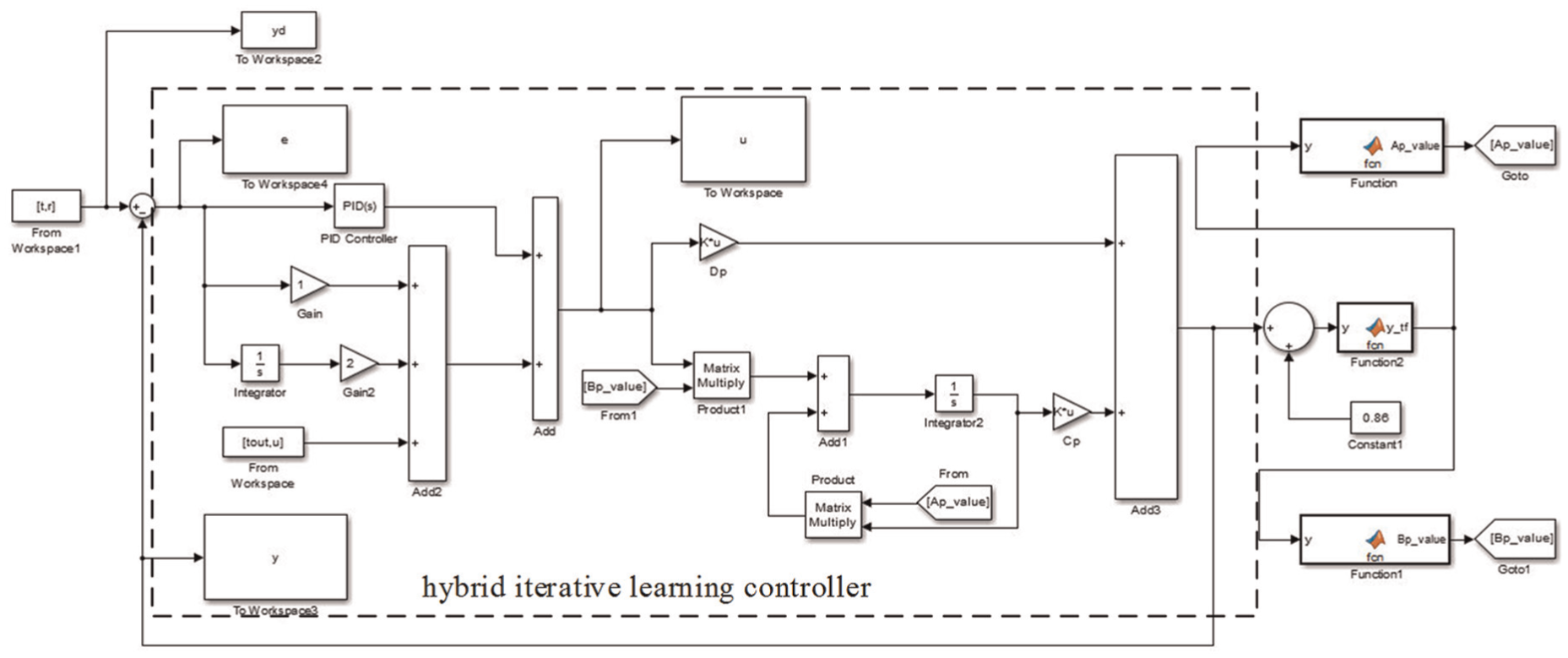
Simulation of hybrid iterative learning linear parameter-varying model.
Simulation analysis
Application of hybrid iterative learning control based on nonlinear model
Aircraft engine DLL model is utilized as the control plant, the iterative learning idea is applied to the conventional PI control system to form a hybrid iterative learning control system, engine different state points are tracked and controlled, experiment results show that the hybrid control system with the iterative learning control module can track target signal more rapidly, and the convergence effect is better and the tracking precision is higher than conventional PI controller.
In order to validate control performance of the hybrid iterative learning is better than the conventional PI controller, the hybrid controller consisting of a closed-loop iterative learning control and a conventional PI control will be used to track and control, respectively, two different working point of aircraft engine above idle state.
1. The engine speed is 100%,
In Figure 7,

System output signal based on nonlinear model.
Iteration stops when
In Figure 8, the maximum output deviation of the system decreases gradually with the increase in the number of iterations. After the first iteration, the deviation

Maximum deviation of system based on nonlinear model.
2. The engine speed is 96%,
In Figure 9, for conventional PI controller,

System signal output based on nonlinear model.
In Figure 10, the output deviation of the system decreases obviously with the increase in the number of iterations. The deviation of the system

System deviation output based on nonlinear model.
Application of hybrid iterative learning control based on the state variable model
1. The engine speed is 100%, the controller gains


Simulation results are shown in Figures 11 and 12.

System signal output based on the state variable model.
System deviation output based on the state variable model.
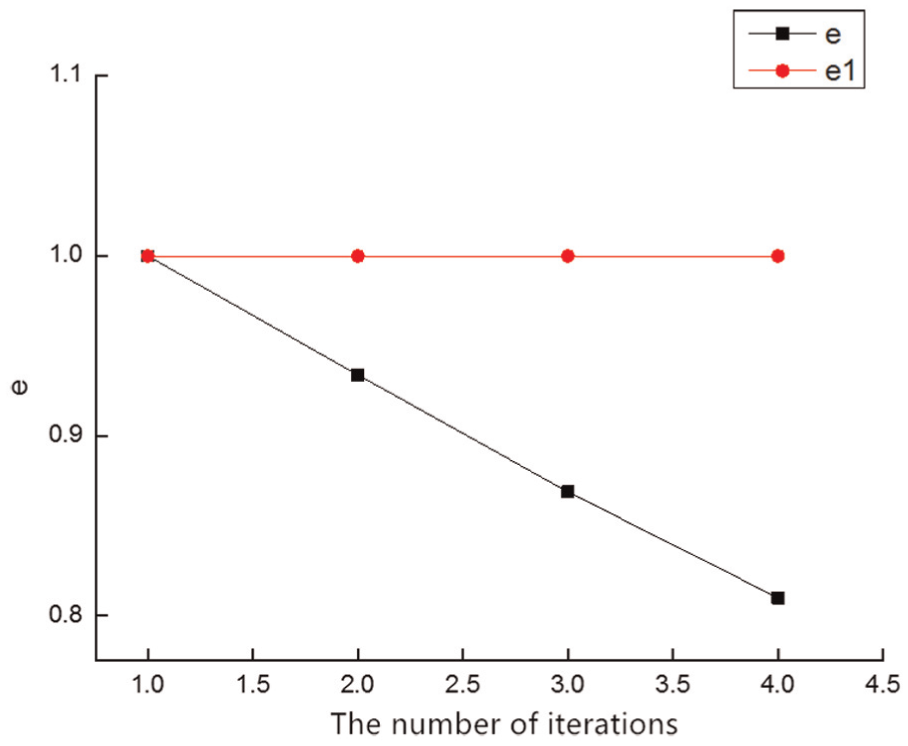
In Figure 11,
In Figure 12, e is the maximum absolute output deviation of hybrid iterative control system and e1 is the maximum absolute output deviation of conventional PI control system. With the increase in the number of iterations, the maximum absolute deviation of hybrid iterative control system has greatly reduced and the maximum absolute deviation of conventional PI control system has not changed.
2. The engine speed is 88%,


Simulation results are shown in Figures 13 and 14. In Figure 13, for the conventional PI control system,

System signal output based on the state variable model.

System deviation output based on the state variable model.
In Figure 14, the convergence rate of the hybrid iterative control system is very fast, with the increase in the number of iterations, the output deviation of the system is greatly reduced, while the output deviation of the system cannot be reduced by the traditional PI controller. From the simulation results of the 100% speed point of the engine, in different state points of the engine, the hybrid iterative learning has excellent control effect. Compared with the conventional PI controller, all performance indices of the control system have greatly promoted after iterative learning is added.
The simulation results show that compared with the conventional PI controller, the control effect of hybrid iterative learning on the state variable model of aircraft engine is faster convergence speed, smaller absolute deviation, and better control quality. Moreover, in the face of aircraft engine model at different state points, hybrid iterative learning control has a better control effect.
Application of hybrid iterative learning on LPV model
The working status of the aircraft engine, which is described by the LPV module of the controlled plant, is between the speed of 86% and 96% in the experiment.
In Figure 15,
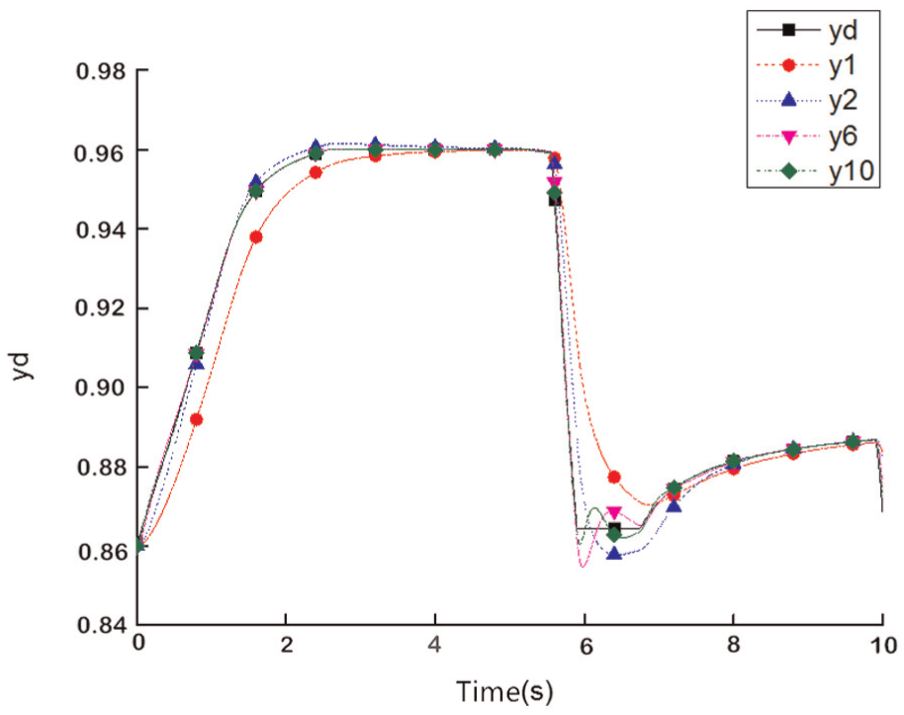
System signal output based on LPV model.

System deviation output based on LPV model.
Simulation experiments show that the hybrid iterative learning controller consisting of the traditional PI controller and PI iterative learning has a good simulation effect on LPV model of aircraft engine. Compared with the conventional PI control system, the output deviation of the system can be reduced by hybrid iterative learning control system in a very short time, and the output signal is more accurate in tracking the desired signal.
Conclusion
The iterative learning control for aircraft engine above idle state is studied. An approach combining the PI iterative learning with the traditional PID controller is proposed and then this hybrid iterative learning controller is constructed to control the speed of three typical engine models. In the simulation study, the proposed method is applied to the nonlinear component level engine model, state variable engine model, and LPV engine model. The results show that the proposed approach has significant improvements than the conventional PID control method, system deviation can be greatly reduced, and the desired trajectory is tracked gradually or completely in a few iterations within a very short time. Compared with the conventional PI controller, the control ability of the conventional PI controller will be significantly improved after adding the iterative learning.
Footnotes
Appendix 1
Academic Editor: Hamid Reza Shaker
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the Natural Science Foundation of Jiangsu Province (No. BK20140820), the Natural Science Foundation of China (No. 51406083), and the Fundamental Research Funds for the Central Universities (No. NJ20160037).