
Abstract
In the long-term service period, the bridge health monitoring system produced a huge amount of monitoring stress data; proper handling of these data is one of the main difficulties in the field of structural health monitoring, especially to predict the structural stress based on the monitored data. The objectives of this article are to present: (1) a nonlinear dynamic model, (2) a nonlinear mixed Gaussian particle filtering algorithm for predicting the monitored data based on the dynamic model, and (3) an approach combining nonlinear mixed Gaussian particle filtering algorithm with structural health monitoring data to predict the structural stress under uncertainty in real time. And an actual example is provided to illustrate the application and feasibility of the proposed models and methods.
Keywords
Introduction
The past several decades have witnessed civil infrastructure design, assessment, and prediction shift from deterministic methodology to probabilistic methodology. 1 Structural health monitoring (SHM) develops so rapidly that it is likely to become a predominant emerging technology to challenge and improve traditional way of design, assessment, and prediction of civil infrastructure. The research on SHM generally experiences two stages. The first stage, falling in the mature stage, is to install sensors on the bridge structures and conduct much research on the data transition system, data acquisition technology, system integration technology, and other aspects.2–4 The second stage is mainly the reasonable application of SHM data. A sound number of studies are mainly focused on the modal parameter identification, structural damage detection, performance prediction, and reliability assessment. Novel monitoring systems used in structural engineering contain sensors providing a large amount of monitored data (stress data). Proper handling of the continuously provided monitored data is one of the main difficulties in the SHM field for predicting stress data.
SHM technologies, which are popularly used and extensively researched, are anticipated to be cost-effective. The SHM data should be utilized in reliability-based design, assessment, and prediction. There are great potentials to adopt these technologies into the rational performance prediction which is a key point for life-cycle reliability management. 1 For the research of bridge time-variant performance prediction and assessment, some achievements5–16 are obtained, for instance, the reliability assessment of long-span truss bridge 15 and the use of monitored extreme data in the structural performance prediction. 16 But based on the bridges’ dynamic SHM data, the research on dynamically predicting the structural performance is at the initial stage in the world. Therefore, it is important and necessary to give applicable and essential method which integrates the real-time SHM data into the structural performance prediction.
To achieve the above goals, this article first builds the dynamic nonlinear model based on the SHM data. Then, the nonlinear mixed Gaussian particle filtering (MGPF) algorithm, which can be utilized to predict the structural monitored data in real time, is also first given based on the built dynamic nonlinear model. Finally, based on the real-time SHM data, the structural real-time performance is predicted with MGPF algorithm, and an actual example is provided to illustrate the application and feasibility of the proposed nonlinear model and the corresponding algorithm.
Dynamic nonlinear models based on SHM data
The dynamic nonlinear models usually include a nonlinear state equation, a linear observation equation, and the initial state information. The state equation shows changes of the system with time and reflects inner dynamic changes of the system and random disturbances. The observation equation expresses the relationship between the observed data and the current state parameters of the system. For each time t, the general dynamic nonlinear model is formally defined as follows:
Observation equation

State equation

Initial information

where, yt + 1 is the observation data at time t + 1,
For the long-term performance prediction of bridge structures, the nonlinear dynamic model has the better prediction precision than the dynamic linear model6,10,12 which is mainly for short-term prediction of monitored data, so the dynamic nonlinear model is adopted to predict the performance data (stress and reliability indices) of bridge. In this article, for the long-term health monitoring data, the quadratic function model can be approximately and reasonably adopted to build the state equation. The dynamic nonlinear model is built as follows.
The quadratic function
For the long-term health monitored data of bridges, the h(t) (fitted quadratic function) is commonly well fitted to show the changing trend of the monitored data; therefore, h(t) can be approximately and reasonably considered as the changing curves of state data or trend data, which are expressed as



where a, b, and c are all regression coefficients of monitored data.
Based on equation (5)

The solutions of equation (7) are

Based on equation (6)

The solutions of equation (9) are

The transformed approximate state equation based on quadratic function
With equations (8) and (10), for
After equation (11) is simplified, the transferred approximate state equation can be obtained as the follows:
If

and

If

and

where equations (12)–(15) show that the approximate state equations exist two different cases, namely, equations (12) and (13) and equations (14) and (15). The case, which is more reasonable, accurate, and applicable, depends on the regressive coefficients (a, b, and c) and the state parameter
The dynamic nonlinear model
Based on section “The transformed approximate state equation based on quadratic function,” considering the uncertainty of observation variable and state variable, the built dynamic nonlinear models in this article are explained as follows
Observation equation is

If

and

If

and

Initial state information is

where, a, b, and c are constants, and
Determination of the main probability parameters of dynamic nonlinear models
For the dynamic nonlinear model, the main probability parameters are Vt + 1, Wt + 1, mt, and Ct. The method of determining the main probability parameters is as follows.
In this article, the interval period of model updating is 1 day; Vt + 1 is estimated with the variance of differences between resampled data and monitored data. Wt + 1 can be estimated with the variance of differences between resampled data and the fitted changing trend data.
1. With estimation method of kernel density, the actual distribution function

2. Since any set of data can be fitted by a few normal distributions, namely

where
3. The weights and distribution parameters of the fitted normal distributions can be obtained with the least residual error quadratic sum method OLS, namely

where
MGPF algorithm based on the nonlinear dynamic model
Based on the built dynamic nonlinear models shown in equations (16)–(21), with Bayesian method and conditional probability method, the following can be reached.
Priori probability distribution

where
One-step forward ahead prediction distribution

where
Posteriori probability distribution

The approximate PDF (importance function) of
based on the extended Kalman filter
Based on equation (21), PDF of the initial state information at time t can be obtained as follows

where
In this article, the observation error and state noise are both supposed to follow single normal distribution, so combining the state equation (equations (17)–(20)) with extended Kalman filter (EKF), 17 equation (25) can be further approximately transferred into

where

When yt + 1 is obtained, based on equations (16) and (29), PDF

where

where

The MGPF algorithm based on the nonlinear dynamic model
Based on equations (16)–(21) and (25)–(33), the MGPF algorithm based on the nonlinear dynamic model is shown as follows:
1. Posteriori probability distribution of the state at time t + 1 based on the Gaussian particles
Suppose that the priori PDF of

When yt + 1 is obtained, with equation (32), the posteriori PDF
For

where
For

Because


The updating of the particle weight

Finally, the posteriori PDF of

2. Priori probability distribution
With equations (29), (34), and (40), the priori probability distribution of the state at time t + 2

With Gaussian particle filter, 17 the recursive updating algorithms are listed as follows:
For
For

where
Because


The updating of the particle weight

The updated priori probability distribution of the state at time t + 2 is approximately

3. One-step forward prediction distribution
With equations (16), (26), and (46), one-step forward prediction distribution

The one-step forward prediction mean and variance are respectively

The one-step forward prediction precision is

For the real-time monitored extreme stress, the monitored data is one by one, so
The nonlinear MGPF algorithm-based extreme stress prediction procedure is shown in Figure 1.

Extreme stress prediction procedure.
Application to an existing bridge
The I-39 Northbound Bridge,6,16 built in 1961, is a five-span continuous steel plate girder bridge shown in Figure 2. The extreme stresses obtained with strain gage (CH15), at the beam bottom in the middle part of the second lateral span from the whole bridge (see Figure 3), are monitored for 90 days. The monitored data displayed the variability of the stresses caused by traffic, temperature, shrinkage, creep, and structural changes. The stresses from the dead weight of the steel structure and the concrete deck are not included in the measured data. And the day-by-day monitored extreme stress data are shown in Table 1 and Figure 4.

Map view of the I-39 Northbound Bridge. 16

Beam bottom in the middle part of the second lateral span from I-39 Northbound Bridge. 16
Real-time monitored extreme stresses.


Curves of initial information and the monitored extreme stress data.
Now, with the monitored extreme stress data, the dynamic extreme stresses are predicted based on the dynamic nonlinear models and the MGPF algorithm. The prediction steps are described as follows in detail.
In this existing example, with equation (4), the trend data of the forward 83 days’ monitored data are directly fitted as

where
To obtain the distribution parameters of initial state information, the monitored stress data of the forward 83 days are smoothly processed or resampled and then the initial information of monitored data, shown in Figure 4, is approximately obtained. Through Kolmogorov–Smirnov (K-S) test for the initial state information, the initial priori PDF is lognormal or normal shown in Figure 5. To better describe the distribution characteristics of the initial state information, the mixed Gaussian PDF is built shown in equation (53). Figure 6 shows that the updated initial PDFs are different based on different monitored extreme stress data, so it is essential to dynamically update the initial PDFs.
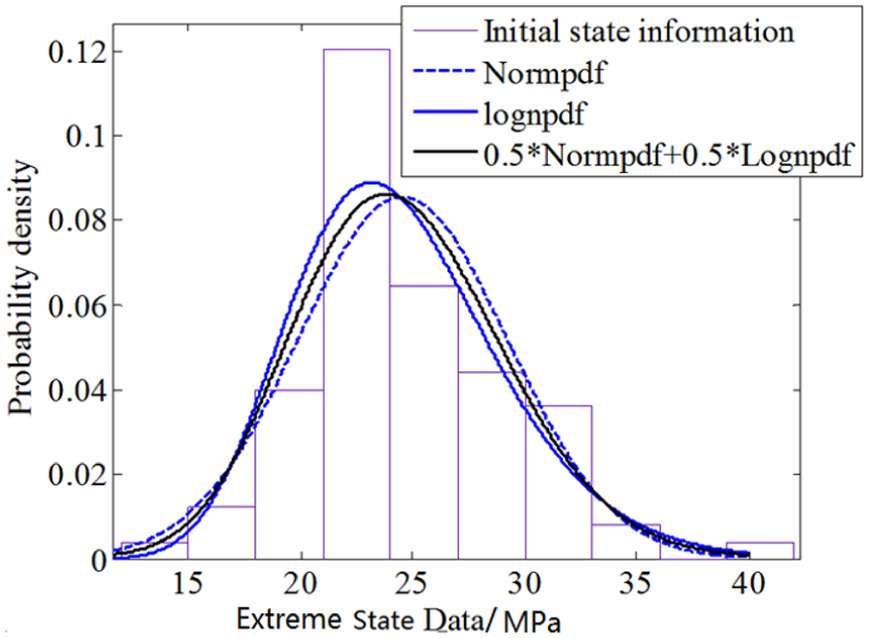
PDF curves fitted with the initial monitored extreme stress data.

Initial state PDF and updated state PDF.
Dynamic nonlinear models based on the monitored data of the forward 83 days
Based on the forward 83 days’ monitored data and Figure 1, with equations (4)–(21) and (50), the built dynamic nonlinear models are as follows:
Observation equation

State equation

and

Initial state information

where yt + 1 is the monitored extreme stress data at time t + 1, mt + 1 is the state value of the monitored extreme stress at time t + 1,
With equations (51)–(53) and (34)–(49), based on the monitored extreme stress data from the 83rd day to the 89th day, the predicted extreme stress and prediction precision from the 84th to 90th day are, respectively, solved which are shown in Figures 7 and 8.
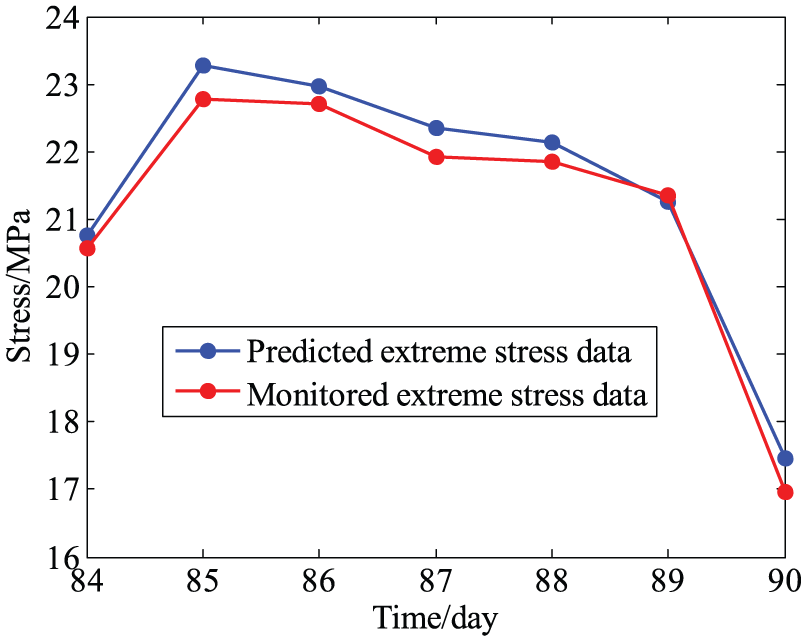
Predicted and monitored extreme stress data.

Prediction precision of dynamic nonlinear models based on MGPF algorithm.
From Figure 7, it can be noticed that the predicted data fit the changing rules of monitored extreme data; Figure 8 shows that the prediction precision of the built dynamic nonlinear models is nearly better and better with the updating of the monitored stress data. But there is a sudden increase between 87th and 88th day, and a decaying trend after 89th day. These two problems will be studied in the following papers by the authors.
Conclusion
This article first builds the dynamic nonlinear models based on the monitored data. Then, the MGPF algorithm is first given for structural stress information prediction. Finally, an actual example is provided to illustrate the feasibility and application of the proposed MGPF algorithm.
From the stress prediction results shown in Figure 7, the prediction value of the extreme stress fit the changing rules of the monitored value; the prediction precisions, shown in Figure 8, are both better and better with the updating of the monitored data, which shows that the proposed dynamic nonlinear models and given MGPF algorithm in this article are reasonable and feasible for structural extreme stress prediction. But there is a sudden increase between 87th and 88th day and a decaying trend after 89th day. These two problems will be studied in the following papers by the authors.
Footnotes
Acknowledgements
The authors would like to thank the editor and the anonymous reviewers for their constructive comments and valuable suggestions to improve the quality of the article.
Academic Editor: Yongming Liu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Fundamental Research Funds for the Central Universities (lzujbky-2015-300, lzujbky-2015-301).