In this article, a new anti-disturbance inverse optimal translation and rotation control scheme for a rigid spacecraft with external disturbances and actuator constraint is presented. An inverse optimal controller with input saturations is designed to achieve asymptotic convergence to the desired translation and attitude and avoid the unwinding phenomenon. The derived optimal control law can minimize a given cost functional and guarantee the stability of the closed-loop system. Later, a new sliding mode disturbance observer is also proposed to compensate for the total disturbances. A rigorous Lyapunov analysis is employed to ensure the finite-time convergence of observer error dynamics. A numerical simulation of position and attitude maneuvers is given to verify the performance of the developed controller.
Integrated translation and rotation control of spacecraft has been an important problem in many space missions such as in-orbiting maintenance and spacecraft formation flying.1,2 Recent researches mainly neglect the mutual coupling and separate attitude motion from translation. In practical situation, the translation and rotation of spacecraft should be together taken into consideration to achieve the control requirement. This makes translation and attitude control of spacecraft very challenging. In practice, an integrated controller for the 6-degree-of-freedom (6-DOF) relative motion has received much attention. Moreover, it is difficult to exactly know the model parameters of spacecraft and external disturbances may lead to the system performance degradation.
To solve this problem, various robust control approaches have been proposed. Zhang and Duan3 used the backstepping technique to develop a robust finite-time controller for the problem of integrated translation and rotation of a rigid spacecraft. Kristiansen et al.4 proposed two controllers based on integrator backstepping and passivity for 6-DOF coordination control problem of two spacecraft. Stansbery and Cloutier5 discussed the 6-DOF control problem based on sliding mode control and State-Dependent Riccati Equation, respectively. A robust adaptive sliding control law was presented in Zhang and Duan6 and Sun and Huo7 to guarantee the finite-time convergence of relative motion tracking errors in the presence of model uncertainties and external disturbances. In Zhang and Duan,8 an adaptive integrated translation and rotation control scheme has been designed by solving an equivalent designated trajectory tracking problem via backstepping philosophy. In Liu and Li,9 and Wu et al.,10 the terminal sliding mode control (TSMC) has been designed to control the translation and rotation of a rigid spacecraft. Lv et al.11 developed a 6-DOF synchronized controller with uncertainties using the backstepping technique. However, these control algorithms have not considered the optimal control solutions to the 6-DOF motion of spacecraft. Thus, these control approaches achieve only robustness ability but optimality cannot be obtained.
Later, several position and attitude controller designs have focused on optimality because onboard fuel consumption significantly influences the durability of a spacecraft mission.12 The inverse optimal control (IOC) method avoids the requirement to solve a Hamilton–Jacobi–Bellman (HJB) equation and gives a globally asymptotically stabilizing controller which is optimal with respect to a cost functional.13,14 Park,15 and Krstic and Tsiotras16 used IOC schemes to develop attitude controllers for rigid spacecraft. Horri et al.17 applied an IOC approach to minimize the torque consumption. The optimal control requirement is to minimize the norm of the control torque subject to a rapidity constraint on the convergence rate of a Lyapunov function. However, to improve the control performance, robust optimal controllers that have both optimality and robustness should be considered. Various methods for developing robust optimal controllers for the attitude control of a rigid spacecraft have been proposed in the literature. Nonlinear control strategies were proposed in Kang18 and Dalsmo and Egeland19 to develop stabilizing feedback controllers for the spacecraft tracking motion. Luo et al.20 designed inverse optimal adaptive control laws to deal with the attitude tracking problem of a rigid spacecraft when an uncertain inertia matrix was taken into account. These optimal control laws were obtained without solving the associated Hamilton–Jacobi–Isaacs partial differential equation directly. In Xin and Pan,21 the nonlinear optimal control technique is employed to design an optimal attitude controller for the problem by finding an approximate solution to the HJB equation through a perturbation process. Generally, it is a formidable task to solve the HJB equation for nonlinear dynamic systems. To solve this problem, Sontag22 used the concepts of control Lyapunov function (CLF)23,24 to solve the HJB equation. Pukdeboon and Zinober25 adopted two optimal SMC laws to deal with the attitude tracking control motion of a rigid spacecraft. CLF and Lyapunov optimizing control were utilized to solve the infinite-time and finite-time nonlinear optimal control problems, respectively. Numerous optimal control schemes have been proposed, but research on the 6-DOF optimal position and attitude control of rigid spacecraft is seldom reported. Pukdeboon and Kumam26 and Pukdeboon27 have optimal SMC laws by combining IOC method with second-order integral sliding mode control technique. However, these control methods did not consider the effect of actuator saturation. In practical situation, due to the physical restriction and energy consumption, if actuator saturation is not handled effectively, a performance degradation or system instability may occur. Hence, attitude control schemes for spacecraft with control input saturation have been increasingly taken into consideration. Boskovic et al.28,29 designed two globally attitude tracking control algorithms with input saturation, parametric uncertainty, and external disturbances based on sliding mode control. In De Ruiter30 and Shen et al.,31 adaptive attitude controllers were also applied to address the tracking problem of spacecrafts in the presence of unknown control input saturation and external disturbances. In Wu et al.,32 adaptive sliding mode control schemes were presented to deal with the synchronized control problem of relative position and attitude for spacecraft. These controllers achieve disturbance attenuation and saturated input. Moreover, control methods mentioned above may lead to the unwinding phenomenon encountered in unit-quaternion-based attitude systems since these control laws consider only one of two equilibrium points of unit quaternion.33 The main contributions of this article are as follows:
A robust IOC method for position and attitude maneuvers in the presence of actuator constraint is addressed in this article. This controller can prevent the unwinding phenomenon.
A new IOC problem for position and attitude maneuvers with input saturation is introduced. The proper CLF is selected and then used to solve this problem. Finding such a CLF and optimal feedback control to solve the IOC problem for the position and attitude control system of spacecraft is very difficult and has not been previously examined.
A new sliding mode disturbance observer (SMDO) is developed. Then, this observer is added to the controller design process to obtain the proposed anti-disturbance optimal position and attitude controller. The finite-time convergence of the proposed disturbance observer is guaranteed via a rigorous Lyapunov analysis.
This article is organized as follows. In section “Nonlinear model of spacecraft and problem formulation,” the dynamic equations and attitude kinematics in 6-DOF of a rigid spacecraft34 are described. Also, the control objective is provided. Section “Inverse optimal translation and rotation control with input saturation” proposes an IOC design with input saturation. The proposed CLF is selected to solve the IOC problem of spacecraft with coupled translation and attitude dynamics and then an optimal stabilizing controller is designed. In section “SMDO,” a SMDO is designed and then used to develop a robust optimal position and attitude controller. The finite-time convergence of estimation errors is guaranteed using the Lyapunov stability theory. In section “Simulation results,” an example of spacecraft translation and attitude maneuvers is provided to illustrate the performance of the developed control law. In section “Conclusion,” conclusions are given.
Nonlinear model of spacecraft and problem formulation
Spacecraft translation and attitude dynamics
The nonlinear dynamics of translational and rotational maneuvers can be modeled by34
where , , and denote the mass, translational, and angular velocity vectors, respectively. Moreover, f and are the control force and bounded disturbance force inputs, and the notation is the skew-symmetric matrix of the vector and defined by
In equation (2), is the inertia matrix of the spacecraft, denotes the distance from the center of mass of the spacecraft to the point where the force is applied. and are the control and bounded disturbance torque inputs, respectively.
Spacecraft translation and attitude kinematics
The kinematic equations of a spacecraft in 6-DOF are given by34
where denotes the position vector of spacecraft, is the attitude quaternion. Here, , where is the identity matrix. The scalar and vector q are defined by
where denotes a unit vector defining the Euler axis, and denotes the magnitude of rotation of the Euler axis. Moreover, the attitude quaternion Q satisfies
Remark 1
For the quaternion Q, the scalar quaternion is employed for avoidance of singular points in the attitude kinematics.35 It is well known that the quaternion-based spacecraft motion system has two equilibrium points. Most of existing quaternion-based control schemes were designed to stabilize only one of two equilibrium points. This may lead to the unwinding phenomenon. The rigid spacecraft may begin at rest arbitrarily close to the target’s attitude and yet rotate through large angles before coming to stay in the target’s attitude.36
Spacecraft relative motion equations
Let the target’s position, target’s translational velocity, and target’s angular velocity vectors be defined as , , and respectively. The relative position, translational and angular velocities are defined as
We assume that the target’s attitude is given by the quaternion , where .
The quaternion for the relative attitude is , where . Applying the multiplication law for quaternions, one has
subject to the constraint
The relative kinematic equation for spacecraft can be written as
where and denote new input forces and torques, and are new disturbance forces and torques. Then, equations (12)–(15) are simplified as
By changing variables, the tracking problem is transformed to a stabilization problem. It is required to construct the control force vector f and torque vector such that is attained when .
Problem formulation
The control requirement of the presented method is to design a new anti-disturbance inverse optimal controller for the relative motion equations (16)–(19) with constraint of actuators, uncertainties, and external disturbances.
In this article, , and are assumed to be bounded. Thus, it is required to design a control law which drives the states of the closed-loop systems (12)–(15) to reach zero when . This can be expressed as
in the presence of the disturbances and and subject to a given input constraint.
Inverse optimal translation and rotation control with input saturation
In this section, an IOC law is designed based on the Sontag-type formula14,22 to solve translation and attitude control problem of a rigid spacecraft without uncertainties and external disturbances. Because it is rather difficult to know a CLF for the relative motion equations (16)–(19), we convert this system of equations to another form which is more simple and then apply the backstepping technique to find a CLF.
We next introduce the new variable
Finding its first time derivative, one has
where
and
Next, the expected errors are defined as follows
where and are positive matrices. Note that it is easy to verify that . As a result, one obtains the new systems
In the following theorem, we show that our chosen Lyapunov function is a CLF for the system (30).
Theorem 1
The following smooth, positive definite, radially unbounded function
is a CLF for the spacecraft relative motion equation (30).
Proof
Using the fact that J is symmetric positive definite, we can rewrite as
where
with being the zero matrix. If and are selected, then we ensure that is positive definite. The gradient of V with respect to x is given by
One can obtain
If , then one obtains
where . We next ensure that if , is achieved
Using and , , one obtains
Evidently, with conditions and , the condition is achieved for all .
A stabilizing feedback control for the system (30) will be designed such that the closed-loop system is globally asymptotically stable and the cost functional37
is minimized. In equation (40), and is a positive-valued function which is continuous except at the origin.
The proposed dynamic feedback control law is designed as
where are the components of the input vector defined by
where and
Next, it is required to show that the controller (41) is an inverse optimal controller that achieves the control objective.
Theorem 2
We consider the spacecraft motion equation (30) in the absence of disturbance vector . The control law defined in equation (41) stabilizes the spacecraft system (30) by minimizing the cost functional (40).
Proof
The proof consists of two parts.
For the first part we consider the case . It is required to ensure that globally asymptotically stabilizes the origin of the system (30). Consider the smooth positive-definite radially unbounded function in equation (33) as the Lyapunov function. The derivative of along the system trajectories of the system (30) is
Clearly, is achieved for all . Next, we select . It follows that
Since is chosen to stabilize the closed-loop systems, . It follows that . Moreover, . Taking , one obtains . This implies that .
The second part investigates the constraint control problem in which . Let and , then the time derivative of the can be expressed as
With , we have . It follows that
Evidently, is achieved by the definition of .
Next, we prove that the control law stabilizes the closed-loop systems by minimizing the cost functional (40). When the constraint actives, the cost functional (40) can be expressed as
We define and let which minimizes for each x. Since is strictly convex function in u for fixed x, is uniquely determined. Thus, the control input minimizes if and only if . Differentiating with respect to , one has
We found that the input satisfies coincide with equation (41). Therefore, the input (41) minimizes the cost functional (41). This implies . This completes the proof.
We have shown that the control input is the IOC law achieving the control objective. However, this controller is designed by ignoring the total disturbance . When the total disturbance is taken into account, the controller (41) may fail to achieve the control requirement. Thus, the proposed IOC law that has robustness ability will be constructed.
SMDO
Recently, owing to the successful application in nonlinear control theory, the extended state observer (ESO)38–40 is a potential method to deal with the problem of nonlinear dynamic estimation. The main idea of ESO is that the total disturbance vector representing system uncertainties and disturbances is considered as an added state of the system, then all states of the system and the added state will be observed fast and precisely. However, few rigorous proofs of ESO convergence have been proposed. In this section, a SMDO which modifies the structure of the traditional ESO is presented and the finite-time convergence of the presented disturbance observer is ensured using the Lyapunov technique.
From equation (50) the proposed robust optimal control is designed as
where is the estimate of the disturbance vector D. Clearly, from equation (54) if , then the disturbance D in equation (50) will be canceled and the control law u is the same as presented in section “SMDO.”
Disturbance observer design
The proposed SMDO is as follows
where and are estimates of the state y and the total disturbance vector D, respectively. is the observer error defined as . Also, , and are diagonal matrices with , and . Here, for any , the function and are defined as
Letting and is the disturbance observer error defined as . the observer error dynamics can be transformed to the scalar form as
Remark 2
The system (56) can be considered as the combination of non-homogeneous super-twisting controller presented in Bhat and Bernstein41 with the extra terms and . When both extra terms are included, the system becomes non-homogeneous and the homogeneity method42 cannot be applied to prove the finite-time stability. However, the concepts of a strong Lyapunov function43 and Lyapunov stability theory can be used to prove the finite-time stability of the closed-loop system.
The following assumption is required for ensuring the convergence of the proposed disturbance observer.
Assumption 1
The ith component of the total disturbances in equation (50) and its first time derivative are unknown but bounded, that is, and , , where l and L are positive constants.
Theorem 3
Let Assumption 1 hold. Consider the system (50) with the total disturbance vector D. Then, there exist positive observer gains , , , and and such that the observer error states and converge to the neighborhood of origin defined as
where , and is a positive scalar. The matrices and are the results from the chosen gains , , , and will be defined later. is the minimum singular value of .
Proof
The candidate strong Lyapunov function is chosen as
which can be written as
where
It satisfies
where .
Taking time derivative to equation (58), one obtains
From equation (68), if the gains are selected such that , then the observer error system (56) is finite-time stable and the region
is reached in finite time. Thus, the proof is finished.
Anti-disturbance optimal controller design
Using the results from the proposed disturbance observer, is the good estimated disturbance. Thus, for the control law (54), is replaced by . The proposed anti-disturbance inverse optimal controller can be obtained as
where . With suitable control gains defined by the optimal control approach, the proposed controller (70) contains both optimality and robustness performance to attenuate unknown bounded external disturbances.
It is required to show that the controller (70) is an inverse optimal controller using the following theorem.
Theorem 4
We consider the spacecraft motion equation (30) in the presence of disturbance vector D. The control law u defined in equation (70) stabilizes the spacecraft system (30) by minimizing the cost functional (40).
Proof
Based on the principle separation,43,44 the stability of controller and disturbance observer can be proven separately. Using the result from Theorem 3, converges to D in finite time. The term D in equation (30) is canceled out by , so u equals . By Theorem 2, one obtains that stabilizes the spacecraft system (30) by minimizing the cost functional (40). The proof is completed.
Simulation results
In this section, the translation and rotation of a rigid spacecraft with numerical simulations to compare the performance of the proposed anti-disturbance inverse optimal control (ADIOC) law (70) and the gain scheduled minimum norm control (GSMNC) scheme in Horri et al.17 In the simulations, the spacecraft parameters taken from Wu et al.10 are given by
The initial translation and attitude orientation of the spacecraft are
Also, initial translational and angular velocity vectors are given by
Here, the initial is set as and the desired position and attitude are
In the simulations, the parameters of ADIOC (70) were set as , , , and . The observer gains are also chosen as , , , and . On the other hand, for the GSMNC scheme we use and . The control parameters for the GSMNC scheme17 are given as , , , and , , , , and . For the GSMNC scheme in Horri et al.,17 the Lyapunov function is chosen as
with and . The maximum torque and force inputs are restricted by N m and N. The bounded disturbance forces and toques are assumed to be
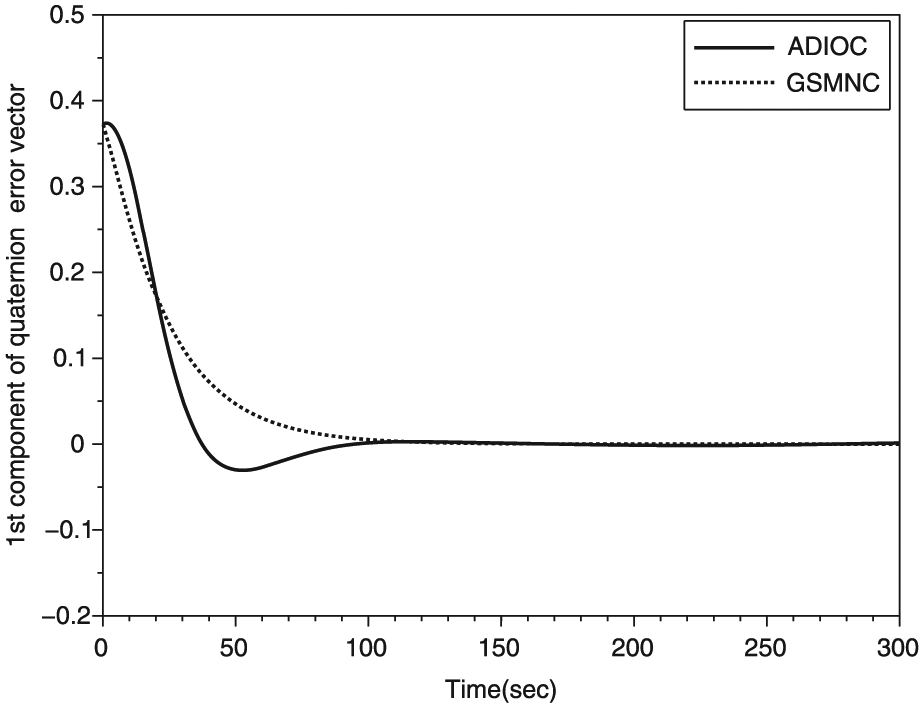
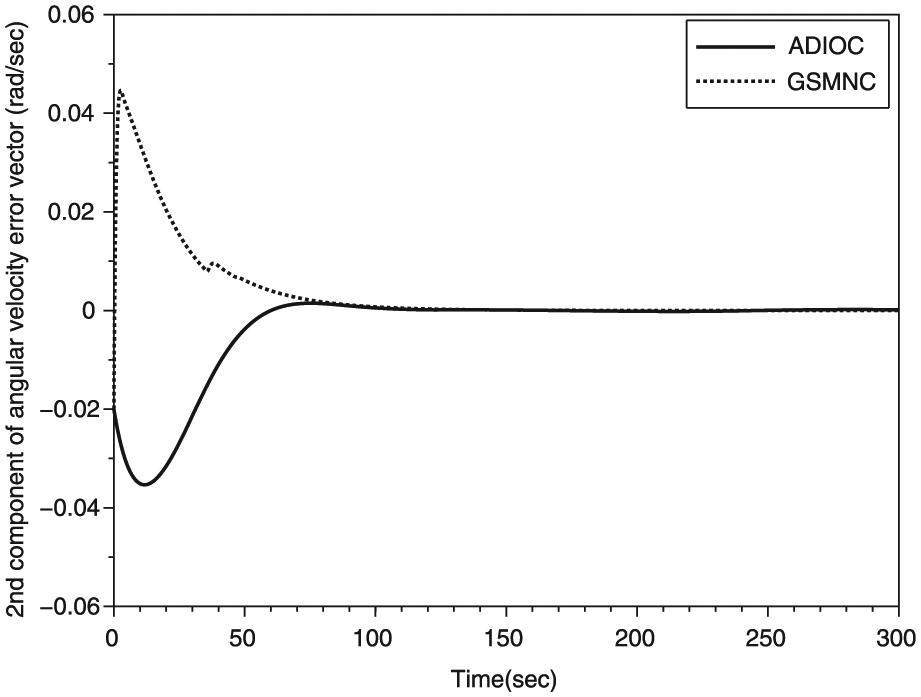
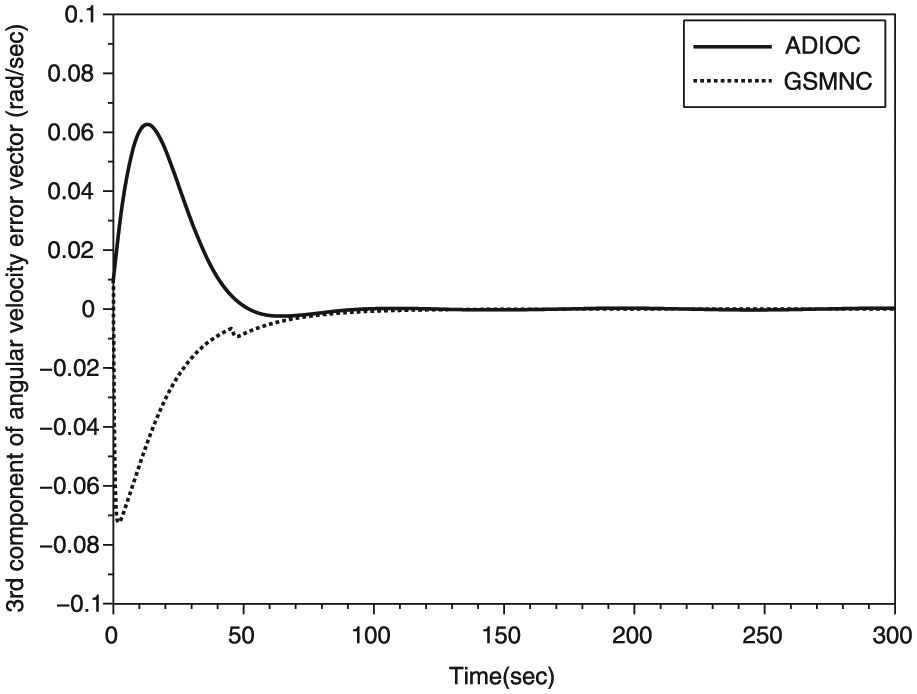
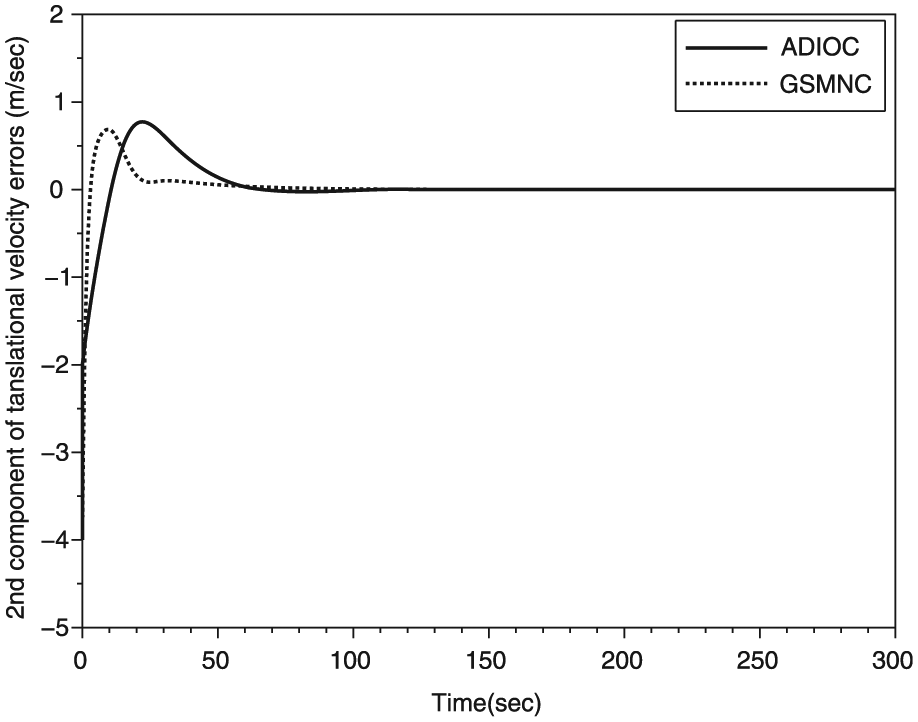
Simulation results of the proposed ADIOC and GSMNC in Horri et al.17 are presented in Figures 1–19. From Figures 1–3 we can see that the GSMNC in Horri et al.17 offers faster rates of convergence of quaternion errors when compared to the proposed ADIOC (70). For the simulation, since the initial condition of is set as , the state should converge to the equilibrium point . Figure 4 shows that only the proposed controller (70) can force the state to the equilibrium point . Thus, this controller can avoid an unwinding phenomenon, while for the GSMNC in Horri et al.,17 an unwinding phenomenon occurs. In Figures 5–7, responses of angular velocities obtained by the proposed controller (70) are smoother than the GSMNC in Horri et al.17 This implies that our proposed controller has better robustness performance. Figures 8–10 show that responses of position errors obtained by GSMNC have established faster convergence rates than the proposed controller (70). Similarly, we can see from Figures 11–13 that translational velocity errors converge to zero more rapidly than the proposed controller (70). However, it can be seen from Figures 14–16 that the GSMNC in Horri et al.17 requires large magnitude torques. Figures 17–19 show that both ADIOC and GSMNC in Horri et al.17 generate harmonic curves bounded by 5 N after 100 s.
Time responses of the first component of quaternion error vector.
Time responses of the second component of quaternion error vector.
Time responses of the third component of quaternion error vector.
Time responses of the scalar component of quaternion error vector.
Time responses of the first component of angular velocity error vector.
Time responses of the second component of angular velocity error vector.
Time responses of the third component of angular velocity error vector.
Time responses of the first component of position error vector.
Time responses of the second component of position error vector.
Time responses of the third component of position error vector.
Time responses of the first component of translational velocity error.
Time responses of the second component of translational velocity error.
Time responses of the third component of translational velocity error.
Time responses of the first component of control torque vector.
Time responses of the second component of control torque vector.
Time responses of the third component of control torque vector.
Time responses of the first component of control force vector.
Time responses of the second component of control force vector.
Time responses of the third component of control force vector.
We have made comparisons between the simulation results obtained by GSMNC in Horri et al.17 and proposed ADIOC (70). Because the proposed ADIOC and GSMNC in Horri et al.17 have different cost functionals, both control laws give different magnitudes of force and torque inputs. This leads to different convergence rates to reach the origin. There are not valid sufficient reasons to find out which control law is better. However, from the simulation results we can compare the performance of disturbance rejection and ability to avoid the unwinding phenomenon. It is found that the proposed ADIOC (70) offers smooth attitude and angular velocity responses and effectively avoid the unwinding phenomenon. From these simulation results, the proposed ADIOC (70) seems to be a better control scheme for general cases of spacecraft translation and attitude maneuvers.
Conclusion
A robust IOC scheme of spacecraft translation and rotation of a rigid spacecraft with external disturbances and actuator constraint has been developed. The concepts of the IOC method and CLF have been applied to design an inverse optimal translation and rotation control law with actuator saturation. A new SMDO has been designed by modifying the structure to the traditional ESO. The finite-time convergence of estimation errors has been proven using the Lyapunov technique. It has shown that the developed controller solves the IOC problem with input saturation and asymptotically converges to the equilibrium points.
The proposed controller is assessed and compared with the GSMNC method in Horri et al.17 through numerical simulations. The simulation results demonstrate the usefulness of the proposed control scheme. Further research may consider the extension of the proposed methods to the system with unstructured uncertainties or Markovian jump systems. The successful control development of these systems can be founded in Soltanpour et al.45 and Li et al.46
Footnotes
Academic Editor: José Tenreiro Machado
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research was supported by King Mongkut’s University of Technology North Bangkok (KMUTNB) and Thailand Research Fund (TRF) (Contract number TRG5780030).
References
1.
PengHZhaoJWuZ. Optimal periodic controller for formation flying on libration point orbits. Acta Astronaut2011; 69: 537–550.
2.
VandykeMCHallCD.Decentralized coordinated attitude control within a formation of spacecraft. J Guid Control Dynam2006; 29: 1101–1109.
3.
ZhangFDuanGR. Robust integrated translation and rotation finite-time maneuver of a rigid spacecraft based on dual quaternion. In: Proceedings of the AIAA guidance, navigation, and control conference, Portland, OR, 8–11 August 2011, paper no. AIAA 2011-6396. Reston, VA: AIAA.
4.
KristiansenRNicklassonPJGravdahlJT.Spacecraft coordination control in 6DOF: integrator backstepping vs passivity-based control. Automatica2008; 44: 2896–2901.
5.
StansberyDTCloutierJR. Position and attitude control of a spacecraft using the state-dependent Riccati equation technique. In: Proceedings of the American control conference, Chicago, IL, 28–30 June 2000. New York: IEEE.
6.
ZhangFDuanGR.Integrated translational and rotational finite-time maneuver of a rigid spacecraft with actuator misalignment. IET Control Theory A2012; 6: 1192–1204.
7.
SunLHuoW.Robust adaptive relative position tracking and attitude synchronization for spacecraft rendezvous. Aerosp Sci Technol2015; 41: 28–35.
8.
ZhangFDuanGR.Robust adaptive integrated translation and rotation finite-time control of a rigid spacecraft with actuator misalignment and unknown mass property. Int J Syst Sci2014; 45: 1007–1034.
9.
LiuHLiJ.Terminal sliding mode control for spacecraft formation flying. IEEE T Aero Elec Sys2009; 45: 835–846.
10.
WuGQWuSNWuZG.Robust finite-time control for spacecraft with coupled translation and attitude dynamics. Math Probl Eng2013; 2013: 707485.
11.
LvYHuQLMaGF. 6 DOF synchronized control for spacecraft formation flying with input constraint and parameter uncertainties. ISA T2011; 50: 573–580.
12.
KristiansenRNicklassonPJ.Spacecraft formation flying: a review and new results on state feedback control. Acta Astronaut2009; 65: 1537–1552.
13.
CaiXHanZ.Inverse optimal control of nonlinear systems with structural uncertainty. IET Control Theory A2005; 152: 79–83.
14.
FreemanRAKokotovicPV.Inverse optimality in robust stabilization. SIAM J Control Optim1999; 34: 1365–1391.
15.
ParkY.Inverse optimal and robust nonlinear attitude control of rigid spacecraft. Aerosp Sci Technol2013; 28: 257–265.
16.
KrsticMTsiotrasP.Inverse optimal stabilization of a rigid spacecraft. IEEE T Automat Contr1999; 44: 1042–1045.
KangW.Nonlinear H∞ control and its application to rigid spacecraft. IEEE T Automat Contr1995; 40: 1281–1285.
19.
DalsmoMEgelandO.Stae feedback H∞ suboptimal control of a rigid spacecraft. IEEE T Automat Contr1997; 42: 1186–1189.
20.
LuoWChungYCLingKV.Inverse optimal adaptive control for attitude tracking of spacecraft. IEEE T Automat Contr2005; 50: 1639–1654.
21.
XinMPanH.Nonlinear optimal control of spacecraft approaching a tumbling target. Aerosp Sci Technol2011; 15: 79–89.
22.
SontagED.A “universal” construction of Artstein’s theorem on nonlinear stabilization. Syst Control Lett1989; 13: 117–123.
23.
FreemanRKokotovicPV.Robust nonlinear control design. Boston, MA: Birkhäuser, 1996.
24.
PrimbsJANevistićVDoyleJC.Nonlinear optimal control: a control Lyapunov function and receding horizon perspective. Asian J Control1999; 1: 14–24.
25.
PukdeboonCZinoberASI. Control Lyapunov function optimal sliding mode controllers for attitude tracking of spacecraft. J Frankl Inst2012; 349: 456–475.
26.
PukdeboonCKumamP.Robust optimal sliding mode control for spacecraft position and attitude maneuvers. Aerosp Sci Technol2015; 43: 329–342.
27.
PukdeboonC.Inverse optimal sliding mode control of spacecraft with coupled translation and attitude dynamics. Int J Syst Sci2015; 46: 2421–2438.
28.
BoskovicJDLiSMMehraRK.Robust adaptive variable structure control of spacecraft under control input saturation. J Guid Control Dynam2001; 24: 14–22.
29.
BoskovicJDLiSMMehraRK.Robust tracking control design for spacecraft under control input saturation. J Guid Control Dynam2004; 27: 627–633.
30.
De RuiterAJH. Adaptive spacecraft attitude control with actuator saturation. J Guid Control Dynam2010; 33: 1692–1696.
31.
ShenQWangDZhuZ. Finite-time fault-tolerant attitude stabilization for spacecraft with actuator saturation. IEEE T Aero Elec Sys2015; 51: 2390–2405.
32.
WuJLiuKHanD.Adaptive sliding mode control for six-DOF relative motion of spacecraft with input constraint. Acta Astronaut2013; 87: 64–76.
33.
MayhewCGSanfeliceRGTeelAR.On path-lifting mechanisms and unwinding in quaternion-based attitude control. IEEE T Automat Contr2013; 58: 1179–1191.
34.
SidiMJ.Spacecraft dynamics and control. New York: Cambridge University Press, 1997.
35.
ShusterMD.A survey of attitude representations. J Astronaut Sci1993; 41: 439–517.
36.
BhatSPBernsteinDS.A topological obstruction to continuous global stabilization of rotational motion and the unwinding phenomenon. Syst Control Lett2000; 39: 63–70.
37.
NakamuraNNakamuraHYamashitaY. Inverse optimal control for nonlinear systems with input constraints. In: Proceedings of the 2007 European control conference, Kos, 2–5 July 2007, pp.5376–5382. New York: IEEE.
38.
HanJ.From PID to active disturbance rejection control. IEEE T Ind Electron2009; 56: 900–906.
39.
LiSYangXYangD.Active disturbance rejection control for high pointing accuracy and rotation speed. Automatica2009; 45: 1854–1860.
BhatSBernsteinD.Geometric homogeneity with applications to finite-time stability. Math Control Signal2005; 17: 101–127.
42.
MorenoJAOsorioM.Strict Lyapunov functions for the super-twisting algorithm. IEEE T Automat Contr2011; 56: 2711–2717.
43.
AtassiANKhalilHK.A separation principle for the stabilization of a class of nonlinear systems. IEEE T Automat Contr1999; 44: 1672–1687.
44.
KhalilHKPralyL.High-gain observers in nonlinear feedback control. Int J Robust Nonlin2014; 24: 993–1015.
45.
SoltanpourMRZolfaghariBSoltaniM. Fuzzy sliding mode control design for a class of nonlinear systems with structured and unstructured uncertainties. Int J Innov Comput I2013; 9: 2713–2726.
46.
LiFWuLShiP. State estimation and sliding mode control for semi-Markovian jump systems with mismatched uncertainties. Automatica2015; 51: 385–393.