
Abstract
The optimal design of hydraulic excavator working device is often characterized by computationally expensive analysis methods such as finite element analysis. Significant difficulties also exist when using a sensitivity-based decomposition approach to such practical engineering problems because explicit mathematical formulas between the objective function and design variables are impossible to formulate. An effective alternative is known as the surrogate model. The purpose of this article is to provide a comparative study on multiple surrogate models, including the response surface methodology, Kriging, radial basis function, and support vector machine, and select the one that best fits the optimization of the working device. In this article, a new modeling strategy based on the combination of the dimension variables between hinge joints and the forces loaded on hinge joints of the working device is proposed. In addition, the extent to which the accuracy of the surrogate models depends on different design variables is presented. The bionic intelligent optimization algorithm is then used to obtain the optimal results, which demonstrate that the maximum stresses calculated by the predicted method and finite element analysis are quite similar, but the efficiency of the former is much higher than that of the latter.
Introduction
Numerous design variables and constraint functions as well as huge computational cost during the structure reliability evaluation process are associated with the multidisciplinary design optimization (MDO) of the hydraulic excavator working device. In this article, the hydraulic excavator working device represents the assembly of the boom, arm, bucket, linkage mechanism, and three sets of oil cylinders. Recently, high-fidelity analysis tools, such as finite element analysis (FEA), have been widely used in MDO to improve the accuracy of design results given the current growth of computing power. However, conventional simulation methods are incapable of handling complicated product design problems. For example, the optimal design of a complex practical system, such as the working device of hydraulic excavator, often involves many design variables and constraint functions; this requires exploration of a broad design space, and millions of FEA codes and thousands of iterations will be necessary for function evaluations. If all of these functions are performed using computationally expensive FEA, excessive computational cost and long computation time will be incurred. Although many decomposition methods based on the principle of disciplines, components, or global sensitivity information have been applied in engineering problems to improve computational efficiency. 1 In many practical applications, finding the global maximum or minimum of objective functions is much more challenging. Sometimes, it is practically impossible. 2
In real-world MDO problems, it is usually extremely difficult to formulate a mathematical relationship between the objective function or the constraints and the design variables, which renders the sensitivity-based approaches impossible. 3 To address these difficulties, an effective alternative is to introduce a computationally less expensive replacement known as the surrogate-based method, in which the objective or constraint functions are indirectly constructed through the results from the design of experiment (DOE); its simplicity and effectiveness can largely reduce the number of full-scale FEA runs and improve the optimization efficiency and feasibility. In other words, the use of surrogate model often requires only a small number of expensive FEA and can significantly reduce the computational time in seeking the global optimal design. 4
Several different categories of surrogate models have been exhaustively adopted in various engineering optimization problems. For example, Huang et al. 5 applied a Kriging (KRG)-based surrogate model to the shape optimization of an aero-engine turbine disk; the min-mass under thermal and mechanical loads demonstrated the effectiveness and efficiency of the optimization method. Fang et al. 6 proposed the sequential KRG model to approximate the objective functions of spot-welded joints. Moreover, the artificial bee colony algorithm was adopted to find the optimal locations of spot-welded joints for maximum fatigue life. Peng et al. 7 chose sequential radial basis function (RBF) to improve the performance and efficiency of truss structure optimization involving sizing, geometry, and topology variables. Zhang et al. 8 proposed a new high-fidelity surrogate modeling technique called adaptive hybrid function, which was successfully applied to standard test problems and a complex engineering design problem. Song et al. 9 adopted a KRG model to approximate the optimal design of a plant fin heat sink under jet impingement; the heat sink was designed and optimized to achieve a high level of performance.
Although there have been studies and hundreds of practical applications on surrogate models,10–13 unfortunately, few have paid attention to the selection of different models. None of the single surrogate model can accommodate all scenarios of engineering problems, and there is not a clear standard to justify which one is better. 14 Different surrogate models often lead to different accuracies and design outcomes. There remains uncertainty regarding which surrogate model is most suitable for a specific engineering design. 15 Sometimes, the selection of surrogate models mainly depends on the design experience of engineers and characteristics of the physical phenomenon itself. 16 Therefore, a comparative study on the different surrogate models in complicated engineering design is necessary. Despite increasing awareness of the outstanding performance offered by the surrogate models, few published works are currently available, especially across several types of surrogate model techniques on the optimization of the hydraulic excavator working device.
As a key load-bearing component, the structural intensity and rigidity of the working device influences the performance of the excavator. Lightweight and structural strength usually compete with each other, and a tradeoff must be made. 17 Conventionally, the design of the working device of hydraulic excavator falls within the category of large-scale problems characterized by several design objectives, dozens of design variables, and constraint functions. During the FEA process, because of the highly nonlinear relationship between the design variables and the objectives or constraints, the objective functions or the constraint functions cannot be expressed by an explicit equation. In such cases, a simple approximate function will save computational time and can be used to seek the global optimal design.
In this article, according to the structural characteristics of the hydraulic excavator working device, a new parameter setting method is proposed. In this new way, a parameter setting method combining length and angle could be adopted. In other words, the basic configuration of the working device is determined by both the lengths and angles between hinge joints; instead of the previous parameter setting method in which all design variables are simply expressed by lengths among different hinge joints;18–20 this is to avoid the phenomenon of constraint violations, guaranteeing that the subsequent optimization process proceeds smoothly. First, the finite element models of the working device are constructed to calculate the maximum stress. The dimension variables between hinge joints and the forces loaded on the hinge joints are then chosen as design variables. After that, Latin hypercube sampling (LHS) is employed to explore the design space. Next, based on the maximum stress of the working device, a comparative study of four different surrogate models, including the response surface methodology (RSM), KRG, RBF, and support vector machine (SVM) are presented to optimize the hydraulic excavator working device. Moreover, the extent to which the accuracy of the surrogate models depends on different design variables is presented in this study, which provides some references on the selection of the most suitable surrogate model. Finally, the optimal design is solved via the bionic intelligent optimization algorithm (BIOA), and the optimal results are obtained. The maximum stresses of the working device are calculated by the approximate method and FEA based on the final design; the results show that the difference is small, which demonstrates that the surrogate model selected in this article achieves a significant improvement in terms of both computational efficiency and precision for such a sophisticated practical engineering problem.
Optimization model of the working device
Model of the working device
The working device is composed of the boom, arm, bucket, linkage mechanism, and three sets of oil cylinders, as shown in Figure 1(a). All components are connected through pin shafts, and the hinge joint letters and their corresponding meanings are given in Table 1.

Working device model of hydraulic excavator (a) the working device model based on the lengths among hinge joints and (b) the working device model based on both the lengths and angles among hinge joints.
Hinge joint letter and its meaning of the working device.

As a critical load-bearing component, the structural intensity of the working device highly influences the performance of an excavator. It can be seen in Figure 1(a) that there are nine design variables of the boom, seven design variables of the arm, and seven design variables of the bucket and linkage mechanism in the model. In addition, some other design parameters are also related to the excavator’s performance, including the cylinder diameters, rod diameters of each cylinder, and maximum rotation speed of the platform. The cylinder diameter and rod diameter affect the digging force and operating speed to a large extent, whereas the maximum rotation speed of the platform is relevant to the working cycle time. As a result, the structure of the working device is determined by more than 30 design variables, most of which are the lengths between hinge joints. This parameter setting method is very simple and intuitional, but many limitations exist. Three joints can form a triangle, and there are dozens of triangles between hinge joints of the working device. In plane geometry, the sum of any two side lengths of a triangle must be greater than that of its third side. Typically, the distance between two hinge joints was used to choose as a design variable in the previous method, but many sample points could not meet the basic principles for constituting a triangle after sampling. In the triangle formed by joints B, C, and F in the boom component, for instance, the situation in which the sum of BC and BF is less than the length of CF usually occurs, which invalidates many sample points. To resolve this problem, both the lengths and angles among hinge joints are selected as design variables in this article, as shown in Figure 1(b). The advantage of this new modeling method is that unknown variables in a triangle can be calculated by means of elementary trigonometric functions, which implies that all sample points can construct a triangle, thus avoiding the phenomenon of constraint violations. In addition, even though any set of parameters could be replaced, no more constraint violations would occur. More importantly, the total number of design variables remains the same as before.
In the above analysis, 30 design variables determine the structure shape of the working device. The change of any parameter could impact the shape and digging performance of the whole working device. In the meantime, more than 53 constraint conditions should be satisfied, including 26 empirical geometric constraints, 10 motion constraints, 11 structural intensity constraints, and 6 manufacturability constraints. As a benefit of the new parameter setting strategy, 34 basic geometric constraints from the previous method are no longer considered, which can greatly reduce the number of constraint functions and the complication degree of the optimization. The optimization objectives include the maximum dump height, digging radius, digging depth, and digging height; the theoretical maximum digging force of the bucket and arm; the working cycle time; and the total weight of the working device.
Finite element modeling
In this article, the FEA models of the working device are developed based on the commercial software application ANSYS, and the models of the boom, arm, and bucket are shown in Figure 2(a)–(c), respectively. The FEA model of the boom consists of 275,305 nodes and 146,293 elements; the arm has 263,426 nodes and 135,645 elements; and the bucket comprises 346,145 nodes and 203,731 elements. Hinge joints C, F, and Q represent the pin shaft connection between the working device and work platform, boom and arm, arm and bucket, respectively. Regarding the constraints on each joint, the axial and radial directions are fixed, and the rotational degree is released. To simulate the practical process, we assume that the working load on every hinge joint is distributed according to cosine in the range of 180° in the plane. The orientation of the distributed force is in the normal direction of the pinhole surface, and the loading is symmetrically distributed in the axial direction of the pins.

Finite element model of the working device: (a) boom model; (b) arm model; and (c) bucket model.
Table 2 summarizes the constitutive parameters of the materials used for the working device in the hydraulic excavator.
Material properties of the working device.

Construction with multiple surrogate models
Construction process of surrogate model
The real mathematical relationship between the design variables and output response of the working device is too complicated to be obtained. The response is usually obtained by a time-consuming FEA, which is unsuitable for iterative optimization. Surrogate model is often adopted to replace the FEA to improve the efficiency.
The flowchart in Figure 3 presents the optimization procedure based on surrogate models. Once a set of points are sampled through the DOE methods, FEA is conducted at these sample points to obtain true responses of objectives and constraint values. Following these responses, different surrogate models of these objectives and constraints can be constructed to approximate each computationally expensive function, and then, the surrogate problem is built. After that, using the cross-validation method, the fitting accuracy of the surrogate models will be evaluated at different sample points in the design variable space with some statistical measurements. Finally, distinct optimization algorithms are performed to calculate the optimal solutions based on these surrogate models.
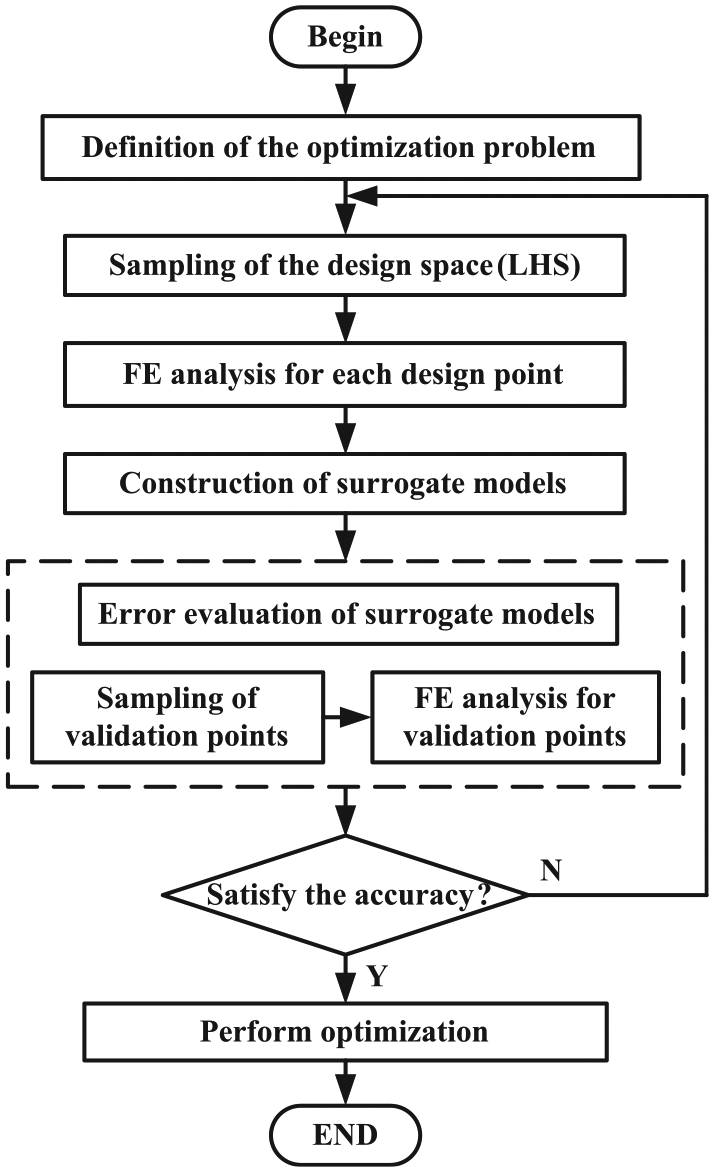
Flowchart of the optimization procedure based on surrogate models.
Table 3 presents brief formulations of the four individual surrogate models that are considered and compared for the best modeling accuracy in this study. There have been a number of comparative studies on different surrogate schemes to determine an appropriate model. 21 This study will extend it for modeling the stress analysis of the working device so that optimization can be performed to enhance reliability.
Functions of individual surrogate models.
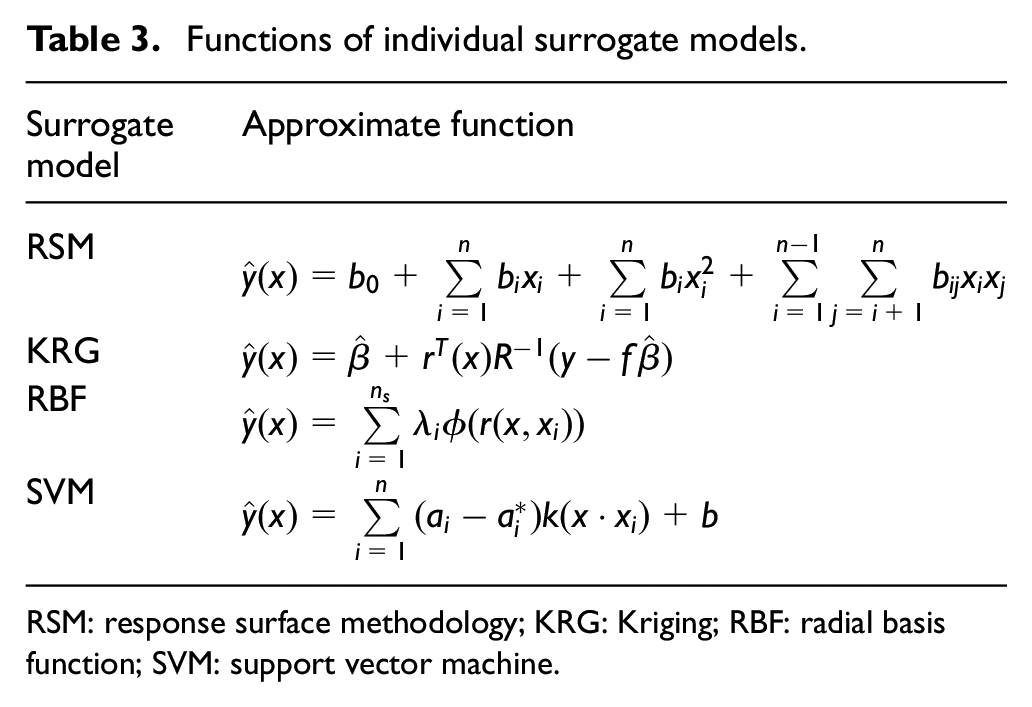
RSM: response surface methodology; KRG: Kriging; RBF: radial basis function; SVM: support vector machine.
Selection of design variables
The choice of design variables often has a great influence on the accuracy of the surrogate models. In terms of the working device, although the new parameter setting method has combined both the lengths and angles, the basic configuration of the working device cannot be controlled effectively after sampling. The author has attempted to construct the surrogate model by using this new setting method; the results show that the error is great, which will be explained in detail in section “Surrogate models based on merely dimension variables.” In this article, the dimension variable between the hinge joints and the forces loaded on the hinge joints are selected as the surrogate modeling parameter. Based on this new modeling strategy, the shape of the working device can be maintained. Simultaneously, the variation of the forces loaded on every hinge joint is fully considered as well, which can guarantee that the working device surrogate models based on the maximum stress have sufficient precision.
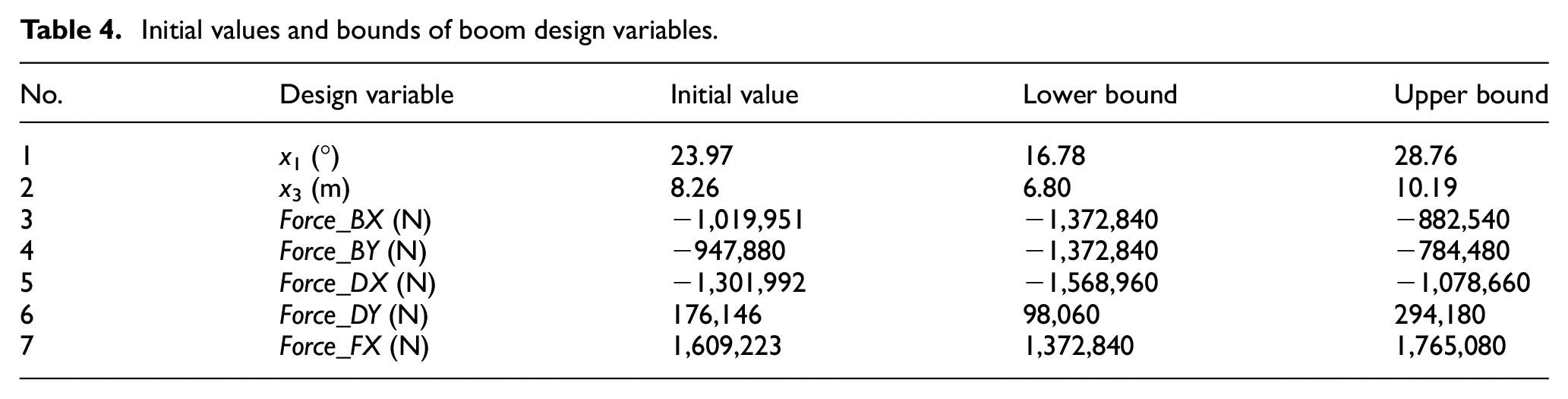
There are dozens of dimension parameters in the working device; if all of them are considered as design variables, the problem will be too complicated to solve. Consequently, the number of design variables must be reduced. According to the sensitivity information between the objective functions or the constraint functions and design variables, 22 x1 and x3 are chosen as boom design variables, for example. The dimension parameters with the greatest influence on the shape of the boom are x1 and x3; whereas x1 expresses ∠BCF, which is the included angle formed by joints B, C, and F in the boom component, x3 is the length between joints B and F, as shown in Figure 1(b). The general shape of the boom can be confirmed purely by these two parameters, and other dimension variables can be calculated through trigonometric transformation. In total, there are seven design variables in the boom component. Other design variables consist of the forces loaded on hinge joints B, D, and F. The ranges of design variables are presented in Table 4, which were determined based on the experience of the designer. Force_BX and Force_BY represent the forces in the X and Y directions on hinge joint B, respectively. The force in the Y direction on hinge joint F could be obtained through the moment balance equation.
Initial values and bounds of boom design variables.
Similarly, 11 and 4 design variables are selected in the arm and bucket, respectively, to construct surrogate models based on the maximum stress of the working device. Specifically, the arm design variables have four dimension variables and seven loading variables, containing x8, x9, x12, and x16; the forces in the X and Y directions loaded on hinge joints E, G, and N; and the force in the X direction on hinge joints Q. The bucket has two dimension variables and the forces in two directions loaded on hinge joint K. The overall performance of the working device, including the working range and some other digging targets, can be optimized under the practical conditions and the constraints on the stresses.
Optimization formulation
The optimization of the working device in this article can be formulated mathematically as

where H1(X) is the maximum digging depth; H2(X) is the maximum digging height; R1(X) is the maximum digging radius; F1(X) is the maximum bucket digging force; F2(X) is the maximum arm digging force; T1(X) is the working cycling time; T2(X) is the total weight of the working device; gi(X) is the empirical geometric constraints; and gj(X) denotes the structural intensity constraints.
Design points sampling method
The construction of the working device surrogate models between the objective functions and the design variables requires a number of sample points to approximate the true working process. These sample points are generated by DOE, and the surrogate models can be developed and trained using the points selected from the design variable space. DOE has been a very effective tool to understand the characteristics of complicated structural design problems and help investigate how the inputs affect the responses. 23 Of all DOE methods, including orthogonal array, Latin hypercube design, and uniform design, the LHS can create more homogeneously distributed sampling points in the design space and efficiently capture the higher order of nonlinearity at a larger number of levels with fewer design points; 24 therefore, LHS is selected to arrange the design points.
Because 7, 11, and 4 design variables are included in the components of the boom, arm, and bucket, 72, 132, and 30 sets of sample points are generated as the training data, respectively. It should be noted that RBF and KRG pass through all sample points, which means that the approximate function is equal to the true values at these points; thus, it is impossible to check the accuracy at these sample points. In this article, 36, 33, and 15 sets of additional validation points obtained with the LHS method are generated to perform further FEA and evaluate these models.
Accuracy assessment of multiple surrogate models
To ensure adequate accuracy of the surrogate models for the application of the working device, it is necessary to assess the accuracies generated from different surrogate models prior to design optimization. Three numerical estimators, namely, R square (R2), 25 root mean squared error (RMSE), and mean absolute percentage error (MAPE), are used to assess the accuracy of these four models, 26 as given in equations (2)–(4), respectively.



where n represents the number of sampling points for testing the model accuracy, yi is the true value at the validation points,
Surrogate models based on merely dimension variables
To prove the effectiveness of the new surrogates modeling strategy proposed in section “Selection of design variables,” we take the arm as an example. The surrogate models based on the maximum stress are constructed based on only seven dimension variables, as shown in Figure 1(a). In total, 72 sets of sample points obtained with the LHS method are then generated as the training data, and 36 sample points are used to detect the accuracy; the results are shown in Table 5.
Accuracy assessment of the arm surrogate models.
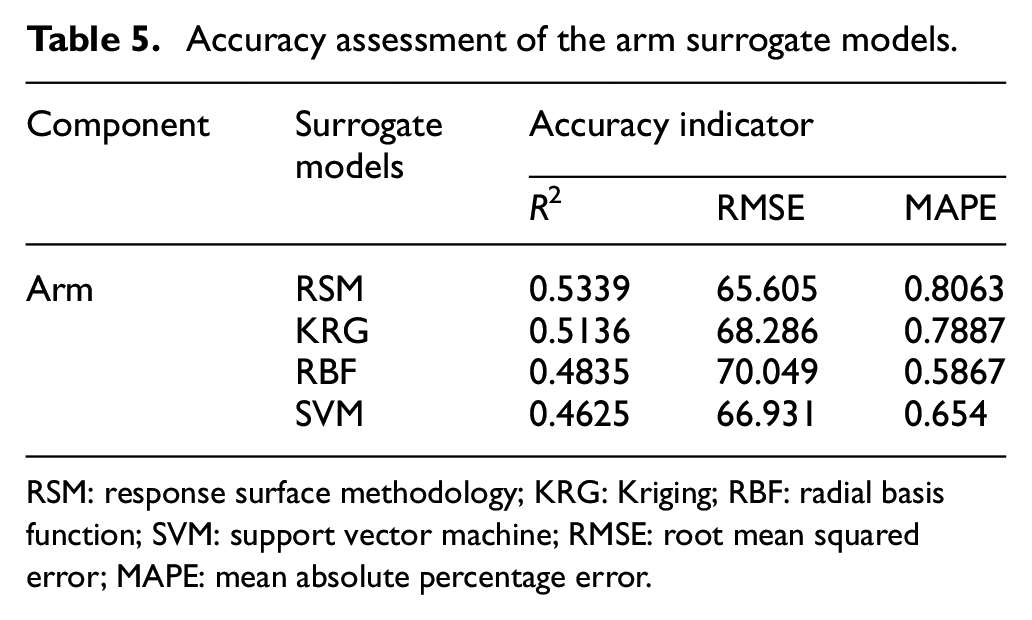
RSM: response surface methodology; KRG: Kriging; RBF: radial basis function; SVM: support vector machine; RMSE: root mean squared error; MAPE: mean absolute percentage error.
From Table 5, the errors of the surrogate model are great, and the values of R2 are far less than 1. Obviously, the accuracy of the surrogate models is unacceptable. Thus, the design variables setting method merely based on the dimension variable is not comprehensive for the construction of the hydraulic excavator working device.
Surrogate models based on the new modeling strategy
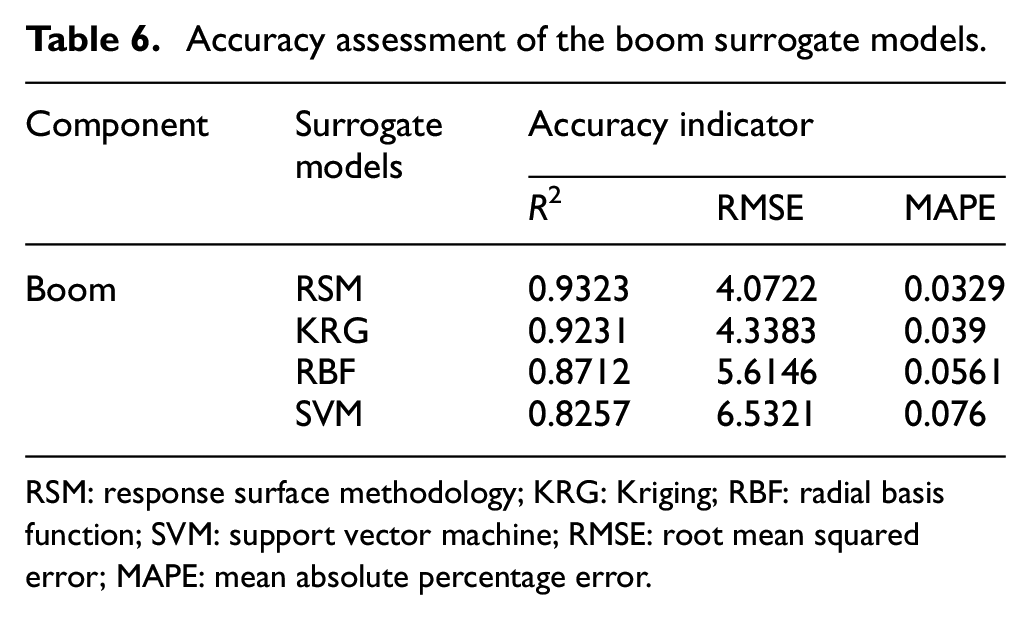
In this section, both the dimension variables between hinge joints and the forces loaded on the hinge joint are selected as the design variables of the surrogate models. The modeling accuracies are summarized in Tables 6–8, corresponding to the components of the boom, arm, and bucket, which enable us to compare the performance of different surrogate models using the same set of check points in terms of these three metrics, so that we can better understand which is the most approximate.
Accuracy assessment of the boom surrogate models.
RSM: response surface methodology; KRG: Kriging; RBF: radial basis function; SVM: support vector machine; RMSE: root mean squared error; MAPE: mean absolute percentage error.
Accuracy assessment of the arm surrogate models.

RSM: response surface methodology; KRG: Kriging; RBF: radial basis function; SVM: support vector machine; RMSE: root mean squared error; MAPE: mean absolute percentage error.
Accuracy assessment of the bucket surrogate models.

RSM: response surface methodology; KRG: Kriging; RBF: radial basis function; SVM: support vector machine; RMSE: root mean squared error; MAPE: mean absolute percentage error.
From Tables 6 to 8, it is evident that RSM and KRG performed the best in terms of these four methods, followed by RBF. From a purely mathematical perspective, RBF is suitable for higher dimensional simple analysis, especially for small, nonlinear problems. For low-order nonlinear problems, KRG and RSM are considered to be the best, especially for large-scale problems. It should be noted that RSM requires fewer analyses and gradient calls than KRG, which could be because second-order RSM is a simple second-order polynomial, whereas KRG is more complex. In this article, the idea is to use surrogates for the modeling of the working device based on maximum stress. Dozens of design variables and other design parameters are related. In the meantime, dozens of constraints should be satisfied; the complicated optimization process is a large-scale optimization question. Consequently, RSM and KRG are more appropriate, which has been proved based on accuracy results.
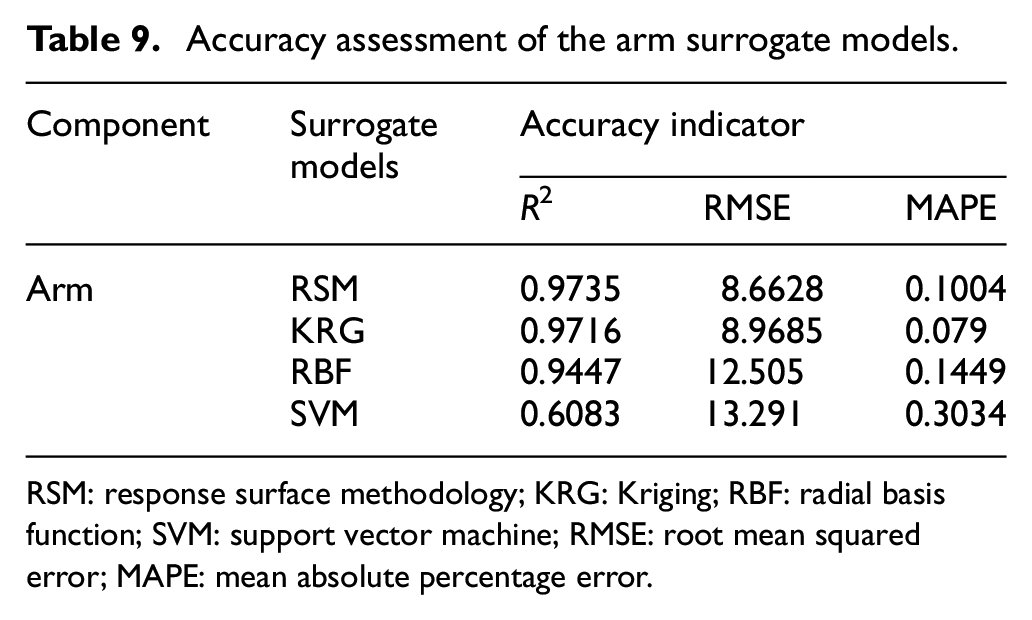
As seen in Table 8, these four models approximate the bucket rather well; the value of R2 is very close to 1 in RSM. This is because the reasonable selection of design variables has an important influence on the accuracy of surrogate models. To further prove this point, we take the arm as an example and select one parameter fewer than the previous case. The design variable x8 in the arm is set as constant because it contributes the least to the objectives and constraint functions according to the sensitivity information. In total, only 10 design variables are left to reconstruct the four surrogate models, and the results are provided in Table 9.
Accuracy assessment of the arm surrogate models.
RSM: response surface methodology; KRG: Kriging; RBF: radial basis function; SVM: support vector machine; RMSE: root mean squared error; MAPE: mean absolute percentage error.
Comparing these two results, it is obvious that the average accuracy values obtained using the new design variables method is much more accurate; there are significant improvements in every indicator compared with the previous results. Specifically, no evident difference can be seen between the accuracy of RSM and KRG; RSM behaves the best among these four methods in accordance with the analysis results, whereas SVM had the highest error. This phenomenon can also be explained according to the mechanical structural of the arm. When x8 is chosen as a constant, as shown in Figure 1(b), the shape of the arm is more significantly affected by the length between hinge joints E and F, so the complicated relationship among hinge joints E, F, and G is cleared. Thus, it still seems appropriate in the case where fewer parameters result in easy convergence of the optimization simulation process. From the foregoing theoretical logic analysis, it can be concluded that the numbers of design variables have a certain effect on the accuracy values, but reasonably selected design variables remain a critical factor for surrogate models.
The comparison shows that the trends of these four models are actually rather similar, and the accuracy indicators change almost monotonically. Although every surrogate model has its cons and pros in practical engineering applications, it is evident that the RSM model has better accuracy than the other three models. In addition, these results also indicate that KRG and RBF are sufficiently accurate and can satisfy the requirement of the prediction performance. Nevertheless, the RSM model has the most satisfactory error estimate and fits the experimental design points very well, which implies the best selection for the optimal design of the hydraulic excavator working device, so it is chosen to carry out the optimization in this article.
Optimization results and discussion
To obtain the optimal design of the working device, BIOA is employed to solve the optimization problem of the working device. BIOA is a derivative-free global optimum algorithm and is widely used to solve large-scale optimization problems.
The iteration processes of maximum stresses in terms of the boom, arm, and bucket are shown in Figure 4(a)–(c), respectively. It can be seen that all the objective functions are convergent and showed no constraint violation case, but the convergence velocity differs. The values of the objective functions tend to be stable as the number of generations reaches about 130; the iterations of arm and bucket processes still show a slight fluctuation when the generations reach 100. With the increase in iterations, all the optimization processes gradually stabilize after 206 iterations eventually. Figure 4 also shows that the maximum stresses in the boom, arm, and bucket are 248.09, 290.62, and 221.91 MPa, respectively. Obviously, they are all less than the maximum permissible stress.
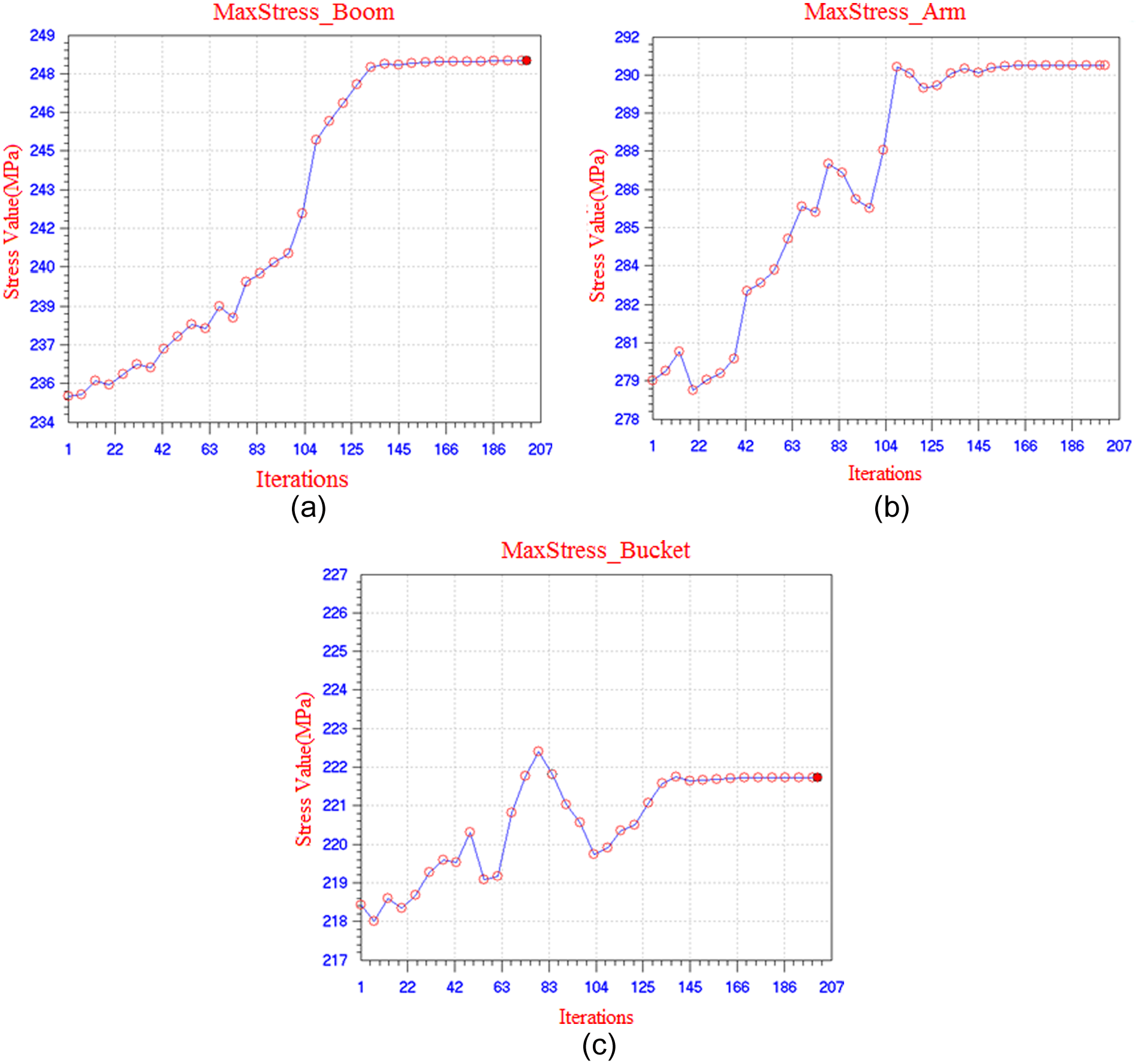
Iteration process of the objective functions: (a) boom; (b) arm; and (c) bucket.
To validate the effectiveness of the selected model, the optimal results obtained by BIOA are evaluated using FEA to check for possible discrepancies between the approximate and actual stress. The stress distribution of the boom, bucket, and arm in ANSYS are shown in Figure 5(a)–(c), and the maximum stresses obtained by FEA in the boom, arm, and bucket are 237.25, 279.7, and 238.27 MPa, respectively.

FEA results based on the optimal solutions: (a) boom; (b) arm; and (c) bucket.
A comparison between the results from approximate and FEA for the optimal design is shown in Table 10. It can be seen that the maximum stresses calculated by these two methods are quite close to each other for all components. The optimal design is verified by FEA. The relative errors between the prediction model and the FEA results are very small (no more than 7%), indicating that the chosen surrogate model has good accuracy. Furthermore, the performance of the initial and optimal design can be contrasted in Figure 4. As shown in Table 11, the maximum stresses in the boom, arm, and bucket are increased by 5.39%, 4.15%, and 1.51%, respectively. The computations are performed on a computer with a six-core 2.93 GHz Intel Xeon processor with 48 GB of RAM. The elapsed time of the approximate method is 4 min, whereas the FEA requires nearly 18 h. It is obvious that the elapsed time of the approximate method is much less than that of the direct optimization method. As a result, the RSM model with high computational efficiency could be applied to the optimization of the hydraulic excavator working device with sufficient confidence.
Comparison between FEA and approximate method for the optimal design.

FEA: finite element analysis.
Comparison of maximum stress between initial and optimal designs.

Table 12 shows the values of the optimal design variables in the boom component. Compared with the initial values, the optimal values of x1 and x3 are increased by 1.17% and 3.63%, respectively; the forces loaded on hinge joints B and F decreased by different degrees; and the force in the Y direction on hinge joint D increased by 9.11%.
Optimal results of the design variables in the boom component.

The results of the optimized working devices are given in Table 13. It is clear that the mining area, including digging radius, digging depth, and digging height, became larger than the initial values, whereas the maximum digging force increased slightly. It can also be seen that the total weight of the working devices increased from 9.47 to 9.77 t, but the cycling time decreased to 20.06 s. The comparative results prove that the final design improves the performance of the working device remarkably.
Optimization results of the working device.

Conclusion
A new design parameter setting method based on the combination of the lengths and angles between hinge joints is successfully applied to the description of the hydraulic excavator working device, which can improve the effectiveness of sample points. It is impractical for all of the design variables to be merely expressed by length in conventional methods because so many conflicts would occur after sampling. Compared with the original methods, this method takes full advantage of basic trigonometric functions, ensuring that all sample points are valid. Multiple surrogate models are then adapted to comparatively study the optimal design of the hydraulic excavator working device. The results show that RSM has higher accuracy than the other models and fits the experimental design points very well, so it is the most appropriate surrogate model for the optimal design of the working device. In addition, the influence of different design variables on the accuracy of surrogate models is also evaluated in this study. Finally, the BIOA algorithm is applied to solve the optimization of the working device based on the maximum stress. The accuracy analysis shows that the maximum stresses calculated by the surrogate model and FEA method are quite similar, but the computational efficiency of the former is much higher than that of the latter. At the same time, many evaluation indexes of the working device are improved significantly, including the digging area and the working cycle time.
Although RSM model has verified to be the most suitable for optimal design of the hydraulic excavator working device in terms of the accuracy analysis, it does not mean that it is best for any structural optimization problems, because the optimization process based on the surrogate models is affected by many factors, including the sampling strategy, the selection of design variables, the number of sampling points, and optimization algorithm. This study presented a comparative research on multiple surrogate models and gave a successful application case, which will provide reference on the selection of surrogate models.
Footnotes
Academic Editor: Filippo Berto
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article. This research is sponsored by the National Key Technology R&D Program of China (grant no. 2013BAF07B04).