
Abstract
This article presents the formulation and a new approach to find analytic solutions for fractional continuously variable order dynamic models, namely, fractional continuously variable order mass–spring–damper systems. Here, we use the viscoelastic and viscous–viscoelastic dampers for describing the damping nature of the oscillating systems, where the order of fractional derivative varies continuously. Here, we handle the continuous changing nature of fractional order derivative for dynamic systems, which has not been studied yet. By successive recursive method, here we find the solution of fractional continuously variable order mass–spring–damper systems and then obtain closed-form solutions. We then present and discuss the solutions obtained in the cases with continuously variable order of damping for oscillator through graphical plots.
Keywords
Introduction
In the past few years, the fractional order physical models1–4 have seen much attention by researchers due to dynamic behaviour and the viscoelastic behaviour of material.
5
Thus, the fractional order model is remarkably used for describing the frequency distribution of the structural damping systems.6–8 The motion of an N-degree-of-freedom system in viscoelastic material with respect to fractional damping has been studied by Ingman and Suzdalnitsky.
9
In this study, Ingman and Suzdalnitsky have transferred the system into Volterra integral equation and then applied iteration method for obtaining the numerical solution. Several authors have modelled the dynamic system based on fractional calculus. Rossikhin and Shitikova
10
have done analysis on viscoelastic single-mass system by considering the damped vibration. Enelund and Josefson
11
used finite element method for analysis of fractionally damped viscoelastic material. The exact solution of fractional order of 1/2 was obtained by Elshehawey et al.
12
The Green function approach for finding solution of dynamic system was studied by Agrawal,
13
which was followed by the Mittag-Leffler function proposed by Miller.
14
By using fractional Green function and Laplace transform, Hong et al.
15
have obtained the solution of single-degree-of-freedom mass–spring system of order
Other methods such as Fourier transform19–21 and Laplace transform21–24 have been proposed by researchers to find the solution of fractional damper systems. Recently, Saha Ray and Bera 25 used the Adomian decomposition method to determine the analytical solution of dynamic system of order one-half and proclaim that the acquired solutions coincided with the solutions obtained through eigenvector expansion method given by Suarez and Shokooh. 26 In this study, Adomian decomposition method have been used by Saha Ray et al. for obtaining a solution for dynamic analysis of a single-degree-of-freedom spring–mass–damper system whose damping is described by a fractional derivative of order 1/2. Naber 27 used Caputo approach to study linear damping system. The generalisation of linear oscillator to form the fractional oscillator has been studied by Stanislavsky. 28 The variable order structure is described in Laplace domain by Das. 8 Here, in this article, we extend the concept of continuously variable order structure of differential equation and get time domain solution.
The objectives of this article are first the mathematical formulation of fractional continuously variable order spring–mass damping systems and then analysing approximate analytical solution of fractional continuously variable order models, in which damping are controlled by viscoelastic and viscous–viscoelastic dampers. Due to dynamic varying nature of fractional order derivative of damper material, it is very difficult to obtain the analytic solutions of the system. The solutions for fractional continuously variable dynamic models have been newly studied in this article. The linear damping natures of the systems have been taken here for modelling the problems. The changing property of the guide, on which the motion takes place, results in oscillation of the systems, which are modelled here by fractional continuously variable order q. The obtained results have been plotted for showing the nature of oscillation, with continuously variable damping order.
The contents of this article are organised as follows. Some mathematical aspects of fractional calculus including Riemann–Liouville approach and Mittag-Leffler function have been presented in section ‘Mathematical aspects of fractional calculus’. Section ‘Basic principle of proposed successive recursive method’ presents the description of successive recursive method. The dynamic fractional continuously variable order mass–spring–damper systems have been formulated in section ‘The problem formulation for mass–spring–damper system’. The successful implementations of proposed successive recursive method for finding the analytical solutions of fractional dynamic systems have been discussed in section ‘Application of proposed successive recursive method for solution of fractional continuously variable order mass–spring–damper system’. The numerical simulations for the results as obtained have been studied in section ‘Numerical simulations and discussion’. Section ‘Conclusion’ concludes this article.
Mathematical aspects of fractional calculus
Definition (Riemann–Liouville)
There are several definitions of fractional derivative1–4 that have been proposed in the past. Here, we review the most frequently used definitions of fractional integral, namely, Riemann–Liouville integral, which is defined as follows

and the fractional derivative, namely, Riemann–Liouville derivative of order
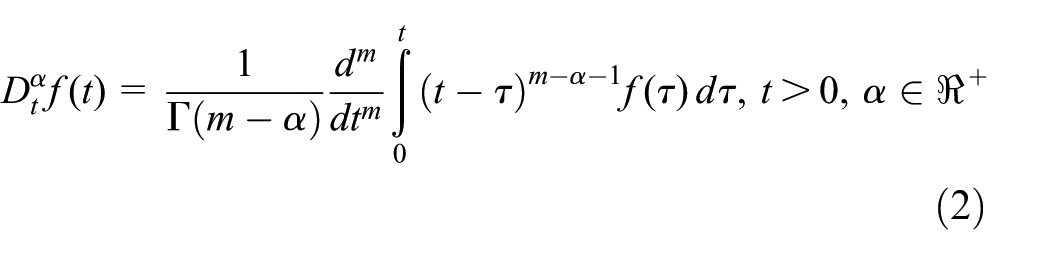
where m is the positive integer, with
Definition (Mittag-Leffler function)
The two-parameter generalised Mittag-Leffler function1,2 defined by means of series expansion is as follows

Basic principle of proposed successive recursive method
For describing the brief outline of proposed method, let us consider the differential equation in the following form

where L and R are the invertible linear operator and remaining of the linear part, respectively. The symbolic part described here in this section will be clear in the solutions in subsequent sections.
The general solution of equation (4) can be written as

where the complete solution of

For initial value problem, we define the inverse linear operator

and for boundary value problem, we have

where the integration constants A and B are determined from the given conditions. Let

So, the general solution of equation (4) becomes

where

and
Thus, we obtain the following recursive formula from equation (9)

So, by using equation (11), we can find the value of
The problem formulation for mass–spring–damper system
Damping is defined as restraining of vibratory or oscillatory motion; that means it reduces, restricts and prevents the oscillation of an oscillatory system. When the damping force is viscoelastic, it has both viscous and elastic characteristics to prevent or damp the oscillation of the system. When the system attains a pure viscous friction at high speed and viscoelastic friction at low speed, the damping force is called viscous–viscoelastic. Similarly, when the system attains a pure viscoelastic friction at high speed and viscous friction at low speed, the damping force is called viscoelastic–viscous. The damping force is expressed in the form of fractional derivative of position,9,29–33 with damping constant c. In this article, order of fractional derivative is taken as q, which varies continuously.
In this section, we analyse two suitable cases for linear damping of fractional continuously variable order mass–spring–damper system with single-degree-of-freedom:
Case 1. Free oscillation with viscoelastic damping;
Case 2. Forced oscillation with viscous–viscoelastic or viscoelastic–viscous damping.
Free oscillation with viscoelastic damping
First, we consider the free oscillation of fractional continuously variable order mass–spring–damper system with single-degree-of-freedom. Here, the mass m displaced from its equilibrium position and then it vibrates freely without any external force

A mass–spring oscillator under viscoelastic damping when no external force is applied.
For the displaced mass from equilibrium, the system experiences restoring force

and a damping force

where q is a continuously variable fractional order viscoelastic oscillator. By Newton’s second law, due to oscillation, the free body with mass m experiences a total force

where a denotes the acceleration while the mass oscillates

where
The total force on the body is given as

which is equal to

We can model the above-described problem as a continuously variable order linear fractional differential equation (FDE) with viscoelastic oscillator, which is described as

where q is a continuously variable fractional order viscoelastic damper, and let us assume that the fractional order q is a continuously variable order, which is defined as

where v is the velocity possessed by the system, that is,

At high speeds

Therefore, with the oscillation process, the fractional order of viscoelastic damping changes continuously with position and time from value half to almost unity and that also changes the damping order of FDE (17). This example will be solved subsequently.
For free oscillation case, there is no external force, we take

Equation (20) can be made continuously variable order initial value problem by assigning suitable initial conditions. In this case, the continuously variable order initial value problem is well posed for the initial conditions
Forced oscillation with viscous–viscoelastic or viscoelastic–viscous damping
Consider a fractional continuously variable order mass–spring–damper system with a mass m oscillating smoothly and repeatedly about its equilibrium position and vibrating freely with external force

For the case of viscous–viscoelastic damping, at the beginning position, that is

A mass–spring oscillator sliding on a continuous-order guide when external force is applied.
Figure 3 gives the difference in the two cases.
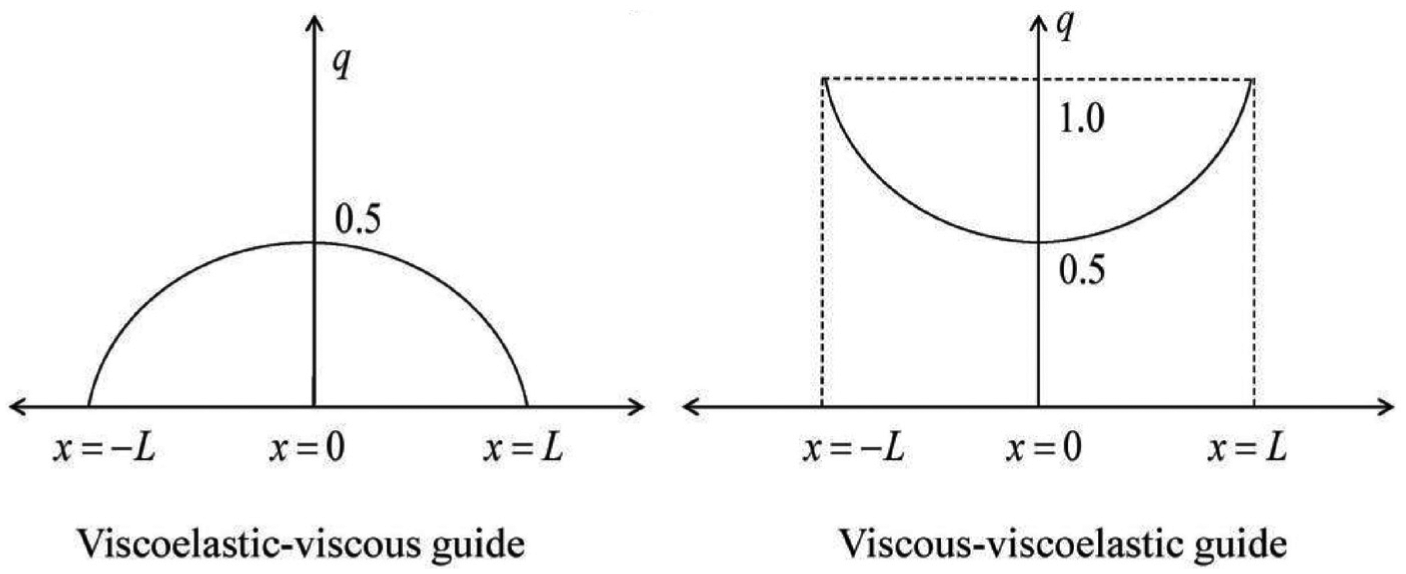
Viscous–viscoelastic and viscoelastic–viscous oscillators.
Suppose the body has been acted upon small impulsive force

where
So, the equation of motion is

The problem is well defined for
Application of proposed successive recursive method for solution of fractional continuously variable order mass–spring–damper system
This section includes the analytic solutions (obtained via successive recursive method) for fractional continuously variable order spring–mass–damper systems for free oscillation with viscoelastic damping and force oscillation with viscous–viscoelastic damping. The successive recursive method has been implemented here for finding the analytical solutions for the proposed systems.
Implementation of successive recursive method for free oscillation of mass–spring viscoelastic damping system
Consider equation (20) with initial conditions, given as

which tends to the equilibrium states of the proposed dynamic system at the beginning process.
Equation (20) can be written in the following form

where q is the continuously variable order of a viscous–viscoelastic oscillator, which is defined as in equation (19) that we rewrite again as following with discretised

Here, the q changes with the small change in time say
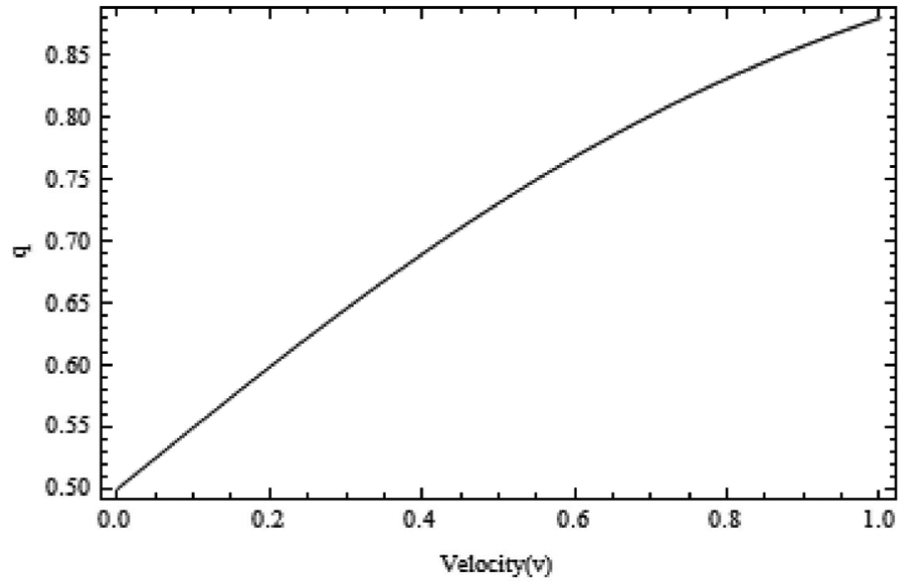
Figure representing continuously variable viscoelastic oscillator.
By successive recursive method, equation (25) can be written as

Here, the inverse linear operator is taken as

By using initial conditions (24), we can calculate initially for first recursion q as

First recursion.
Therefore, equation (28) can be written as

So, by successive recursive method, we have the successive terms as follows

and so on. So, the solution of equation (20) for
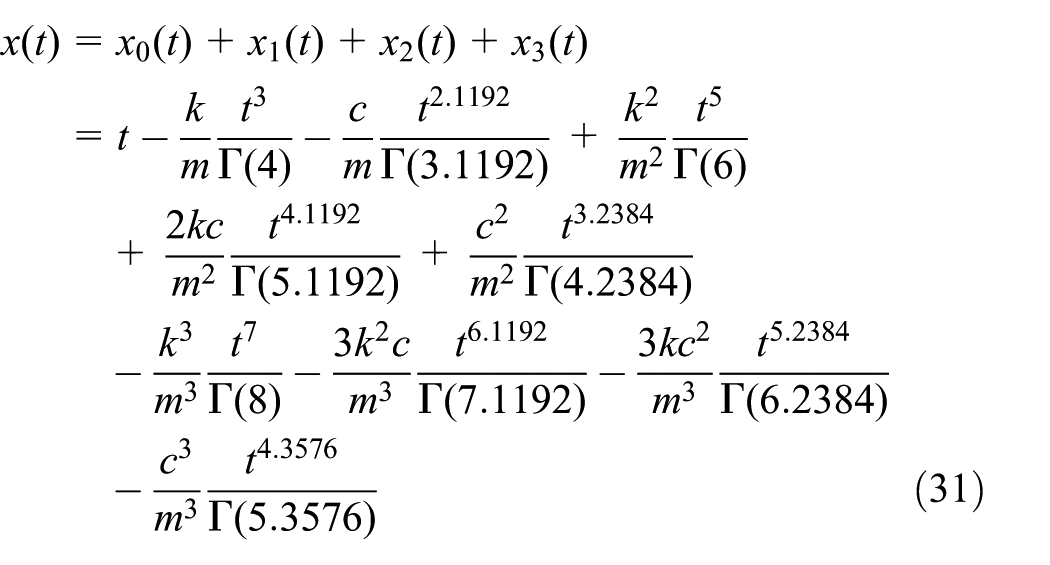
Second recursion.
By differentiation, we obtain from equation (31)
From expression (19) of variable order of viscoelastic element, we obtain the next value of the variable order that is

Here, we note that initially at

So, by successive recursive method, we have

and so on. So, the solution of equation (20) for
Similarly by taking
By generalising the solution by successive recursive method, we have the following, where q is time dependent and can be written as

and so on.
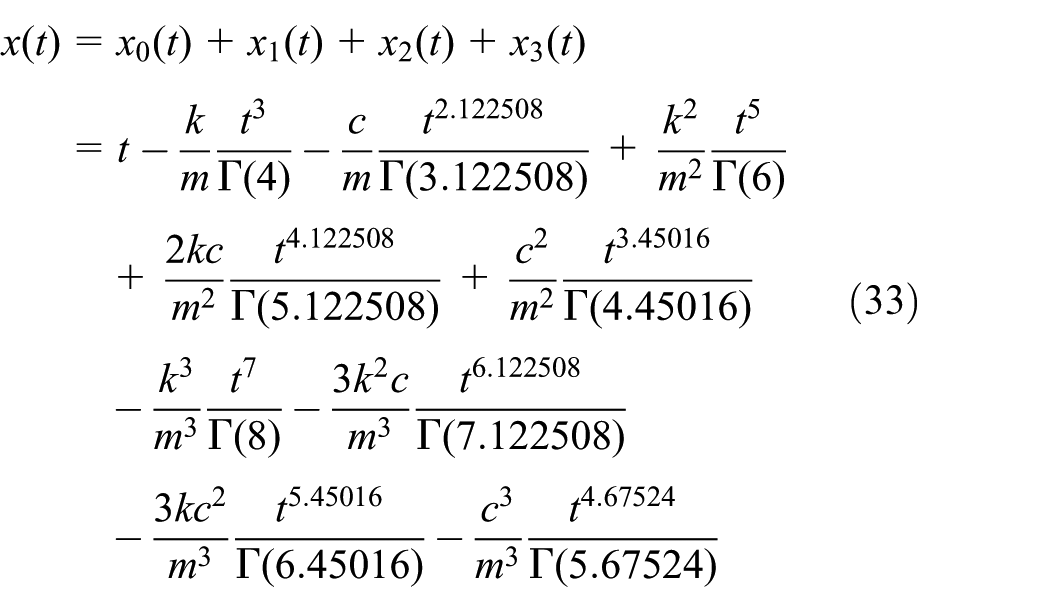
Thus, the cumulative solution is therefore

The value of q is variable and that in this case depends on velocity or
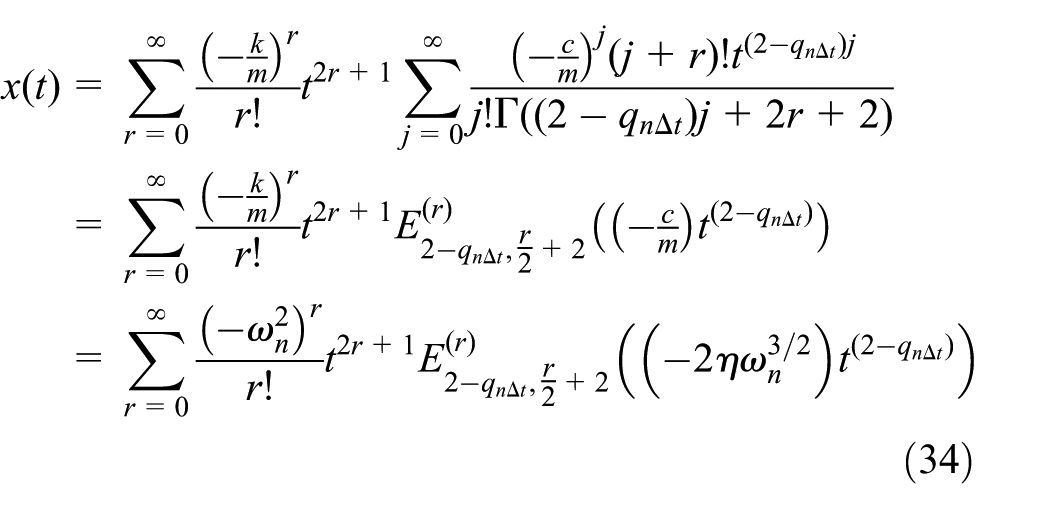
where

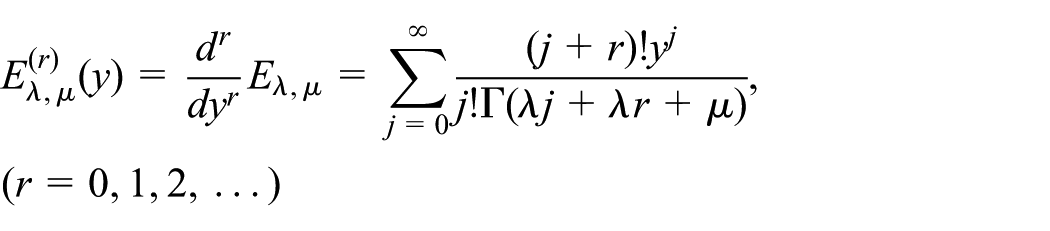
and the rth derivative of the two-parameter Mittag-Leffler function is defined as
The choice of time step of 0.01 is for convenience. Ideally, it should be as small as possible. A smaller value of time step 0.01 gives a very large time to obtain the solution in computer; and a larger value of time step gives inaccurate results. The idea is to simulate the results for a continuously variable order; and we found the 0.01 time step to be convenient for our 600 steps recursion, which are plotted in the graphs.
Application of successive recursive method for forced oscillation of spring–mass viscous–viscoelastic damping system
Let us consider equation (23) with the homogenous initial conditions

which is at the equilibrium states of the dynamic system at the beginning process. Equation (23) can be written in the following form

here q is the fractional continuously variable order viscous–viscoelastic oscillator, which is defined as

Here, the q changes with the small change in time say
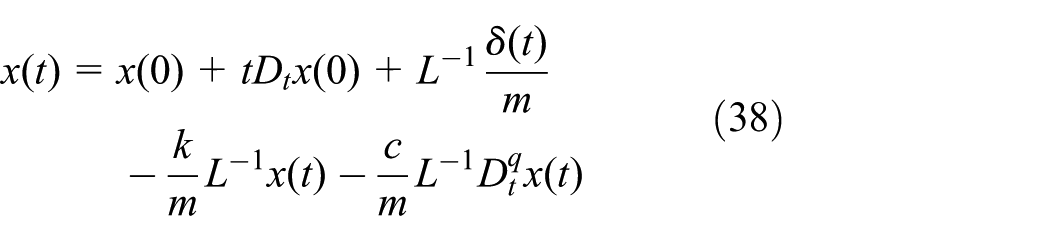
Here, the inverse linear operator is taken as

By using initial conditions (35) and by taking unit length of regime, that is,

First recursion.
Therefore, equation (39) can be written as

So, by successive recursive method, we have

and so on. So, the solution of equation (23) for

Second recursion.
By substituting

Equation (39) can be written as

So, by successive recursive method, we have

and so on. So, the solution of equation (23) for
Similarly, by taking
By generalising the solution by successive recursive method (as carried out in the previous section), we have the following

and so on.
Thus, the solution is given as

The value of q is variable and that in this case depends on position
where

Numerical simulations and discussion
The solution to the oscillator problem with continuously variable damping order q, defined in first case as viscoelastic damping via expression (26) and in second case as viscous–viscoelastic damping via expression (37) governed by FDEs
In this section, the displacement–time graphs have been presented for fractional continuously variable order mass–spring–damper systems for free oscillation with viscoelastic damping and forced oscillation with viscous–viscoelastic damping. Thus, the two FDEs with continuously variable order q are as follows, with the initial conditions stated in the above sections

Here,
Numerical simulation of fractional continuously variable order mass–spring–damper system for free oscillation with viscoelastic damping
For case 1, the body oscillates without implementation of any external forces with the continuous change of the fractional continuously variable order viscoelastic damper q, with
Numerical simulation of fractional continuously variable order mass–spring–damper system for forced oscillation with viscous–viscoelastic damping
It is important to mention here that in system in case 2, oscillation takes place with the small external impulse force
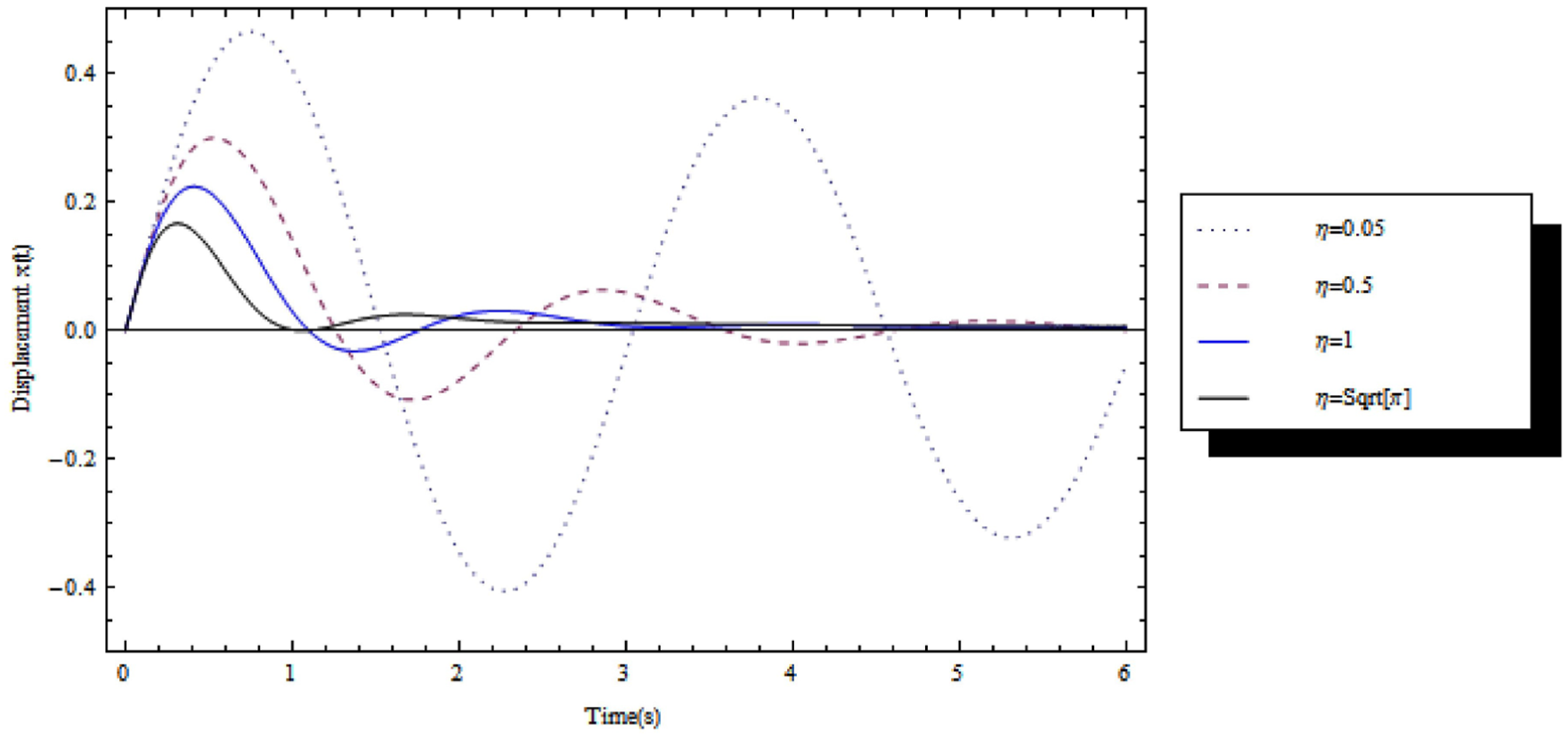
Figures 5 and 7 represent the displacement–time graphs for cases 1 and 2, and Figure 6 presents the velocity–time graph (for case 1) of the fractional continuously variable order mass–spring–damper models for the different values of damping ratio
When
When
When
When
We point out here the definitions regarding natural frequency, damped frequency, under-damped oscillation, critically damped oscillation and over-damped oscillations in the continuously variable fractional order damped oscillator, for which we have developed needs to be redefined with respect to the variable fractional order q of the system. But, here we have drawn similarity with the classical integer-order damped oscillator system.

The displacement–time graph for fractional continuous-order spring–mass damper model for free oscillation with viscoelastic damping plots.
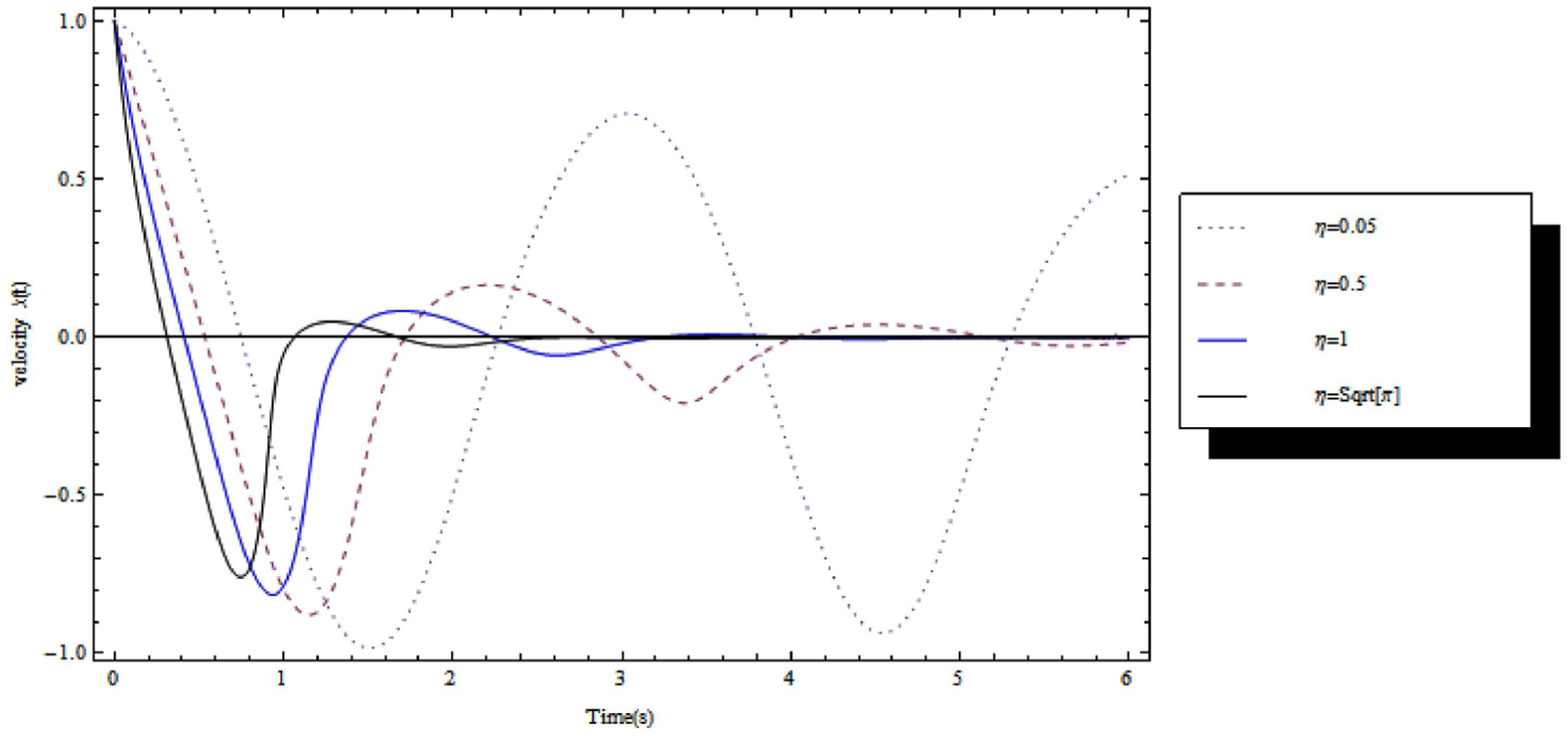
The velocity–time graph for fractional continuous-order spring–mass damper model for free oscillation with viscoelastic damping plots.
The displacement–time graph for fractional continuous-order mass–spring–damper model for forced oscillation with viscous–viscoelastic damping plots.
Conclusion
In this article, we modelled the fractional continuously variable order mass–spring–damper systems for free oscillation with viscoelastic damping and forced oscillation with viscous–viscoelastic damping. The approach is new in the sense of changing of behaviour of guide continuously with the small change in time
Footnotes
Academic Editor: Anand Thite
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This research work was financially supported by BRNS, Department of Atomic Energy, Government of India vide Grant No. 2012/37P/54/BRNS/2382 for Research Project ‘Applications of Analytical Methods for the solutions of Generalized Fractional and Continuous order Differential Equations with the implementation in Computer Simulation’.