
Abstract
In this article, a promoted method of adaptive input shaping based on recursive least square with forgetting factor is proposed to achieve zero residual vibration of time-varying flexible systems. First, the zero residual vibration condition of the flexible system is reviewed. Then, the mathematical analysis of recursive least square–based adaptive input shaping is presented; it can be seen that the traditional recursive least square method could calculate the least square solution with all historical I/O data. That is to say, with the increase in time and larger amount of I/O data, the current data could hardly affect the results of the updated input shapers’ coefficients; thus, the problems of insufficient adaptability and noise accumulation occur. So, a forgetting factor is introduced in the recursive calculation to give less calculation weight on historical data and improve the sensitivity of the current data; thus, the above-mentioned problem could be significantly avoided. At last, the verification experiments of adaptive input shaping are implemented on a two-link flexible manipulator, which is a classical flexible system with severely time-varying dynamics; the results validate the effectiveness of the improved adaptive input-shaping method for the vibration control of these flexible systems.
Introduction
To reduce the unwanted transient deflection and residual vibration of flexible systems when activated, many researchers have promoted a lot of solutions. These solutions could be roughly divided into two categories depending on the need for external input: (1) passive methods and (2) proactive methods. Passive methods include introducing damping materials and modifying the design of mechanics. 1 Proactive methods include feedback control and input shaping. 2 Because of less difficulty and low costs, input-shaping technology has attracted a lot of attention and has become the hotspot in the field. 3
Input-shaping technology reduces vibration by introducing a band-stop filter between the input and flexible systems, filtering the frequencies that equal the modals of the flexible systems. Consequently, the shaped input will not activate vibration. However, it is sensitive to the errors of modeling. That is to say, it lacks robustness, which would cause unsatisfactory performance when it is applied. To improve the performance of the input shapers, robust input shapers and adaptive input shapers are developed.4,5 Robust input shaper could significantly decrease the sensitiveness to the error of modeling; however, it is in expense of additional shaping impulses. 6 That is to say, it has to lengthen the response velocity, and thus the robust input shaper’s application is severely limited. Consequently, adaptive input shaping (AIS) got more attention because of its advantages. 7
Adaptive input shaper could adapt its impulse amplitudes and impulse lag times to the changing system dynamic properties, which could increase the input shaper’s performance apparently. Early AIS adapts its impulse parameters by empirical transfer function estimate (ETFE), which get the modals by doing Fourier transform of I/O data from the system, called indirect AIS.3,8 However, it brings large computation burden, but could not get high accuracy of the system modals. So, direct AIS was presented, which adapts its impulse parameters by the algorithms such as recursive least square (RLS), 9 algebraic identification (AI), 10 and neural network (NN). Direct AIS calculates the impulse response sequences of the system using I/O data directly, and the corresponding impulse parameters of the input shaper could be obtained. Because of lower computation and easy operation, RLS got a lot of application in direct AIS.9,11,12 However, the traditional RLS that was applied in direct adaptive approaches faces the problems of insensitiveness to new data and noise-effect accumulation, which could cause deterioration of the vibration suppression performance when the adaptive input shaper is running for a long time. 13 This means it could hardly get satisfactory suppression of residual vibration when facing severely time-varying flexible systems.
To achieve satisfactory performance of zero residual vibration (ZRV) for severely time-varying flexible systems, the promoted AIS based on recursive least square with forgetting factor (RLSFF) is proposed in this article. According to the mathematical analysis of AIS based on traditional RLS, the cause of insufficient adaptability and noise accumulation is presented. To solve the problems according to the analysis and discussion, the forgetting factor (FF) is introduced in the recursive calculation, giving less than 1 weight for historical data. The older the data, the more times it will be multiplied by the FF in the recursive calculation; thus, its calculation weight will be decreased. This means that the sensitiveness of the current data is improved relatively. Therefore, the above-mentioned problem could be significantly avoided. Finally, verification vibration suppression experiments are implemented on a two-link flexible manipulator, which is a classical severely time-varying flexible system. Through a contrast with three different input-shaping methods, input shaping based on constant coefficients (ISCC), AIS based on traditional RLS, and AIS based on RLSFF, the adaptability of the proposed method is significantly improved; thus, it could achieve real-time adjustment toward the severely time-varying flexible systems. The results validate the effectiveness of the improved AIS method for the vibration control of these flexible systems. The innovation of the work here is to propose a direct AIS control of a flexible system, the contribution is the use of the FF (less than unity) in the RLS estimation to reduce the noise accumulation and adapt the input shaper according to the measurements of actual vibration. Feasibility and applicability of the proposed control is validated through experiments carried out on a two-link flexible manipulator.
This article is organized as follows. In section “ZRV of flexible system,” there is a review of ZRV of flexible systems and design of direct adaptive input shaper. Subsequently, the promoted AIS based on RLSFF is presented through mathematical analysis. In section “Experiment on a two-link flexible manipulator,” there are verification experiments, in which a two-link flexible manipulator is introduced as a classical severely time-varying flexible system, the results of the experiments prove the expectant improvement of AIS based on RLSFF on adaptation ability and the noise accumulation avoidance. Finally, conclusions are drawn in section “Conclusion.”
ZRV of flexible system
Review of ZRV condition and traditional RLS
The flexible system under control of sampling period time

Structure of AIS with a flexible system.
Several matrices are given from the defined input and output



where f is the system’s impulse response including flexible segment and input shaper, and its duration time is
In the ideal ZRV condition, the vibration output

where
According to equations (1–5), equation (6) could be derived to

To ensure the condition of the unchanged final overall state p from ZRV, there is

This means that the input shaper could be reconstructed as

where b equals

and
Given the definition of error


According to ZRV orthogonality condition and RLS algorithm,
9
The values of
Therefore,
To achieve lower computation, given




where



The impulse response of H is

where
The relationship between

where
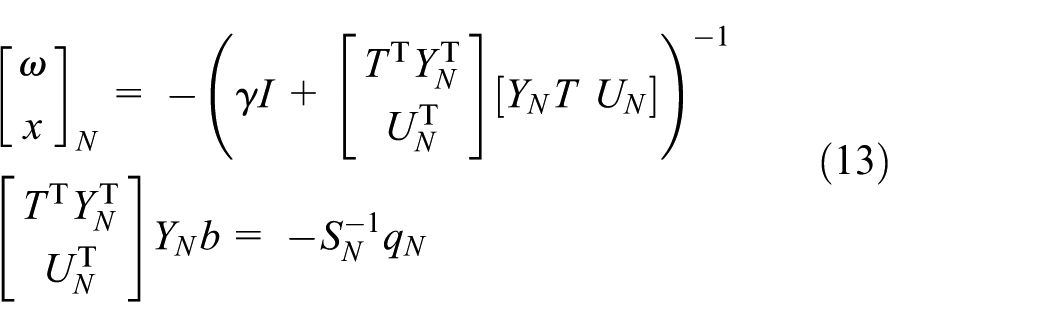
To align the dimensions, equations (9), (10), (14), and (18) should be reformed to




It should be recognized that when Q = K, the reformed algorithm is equivalent to equations (9), (10), (14), and (18). The simplified input shaper
From equations (1–2) and (11–13), it could be seen that RLS is calculating the corresponding values of input shaper to make the error’s quadratic sum minimum. However, it could be known from equations (11) and (12) that traditional RLS used in AIS would calculate the least square solution of I/O data from time zero to time N. Thus, with the increase in N in long-running, and the larger total amount of I/O data, the new I/O data could hardly affect the coefficients of input shapers; thus, the problem of insufficient adaptability occurs. Furthermore, the least square solution from time zero to time N would bring another problem of noise accumulation, which will be analyzed next.
Considering the noise in measurement, the contaminated measurement formula of vibration output y is given as follows

where d is the noise with zero mean value and variance

So the noise-perturbed quadratic cost with the length N data derived from equations (12) and (28) is as follows

where
Thus, the noise-perturbed cost’s expectation is as follows

The analysis could be based on equation (30), which shows the effects of noise to RLS calculation. With the adaptive algorithm running, the value of N will become bigger and bigger, and so does the
Consequently, from the analysis of equations (13) and (30), it could be known that AIS based on traditional RLS faces the problems of insufficient adaptability and noise accumulation. This means that it is hard to get good performance of vibration suppression toward severely time-varying flexible system, and the deterioration of vibration suppression in long-running could hardly be avoided.
AIS based on improved RLS
To solve the problems that traditional RLS faces, a coefficient
That is to say, after the FF proposed, equations (12), (15), and (17) should be reformed to



where
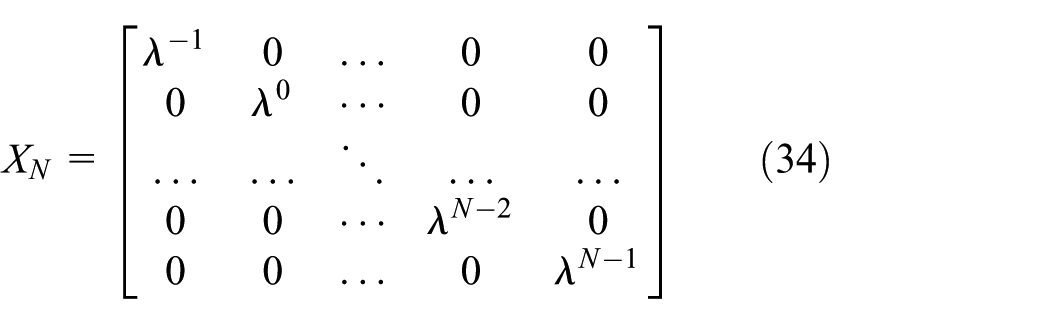
The FF

Combining equations (1), (2), (12), and (31) and the goal of least square, it could be known that RLSFF would still calculate the minimum value of error’s square sum J. However, the difference with the former is that there is a coefficient matrix
However, the lower value of
In order to give a better understanding about the AIS based on improved RLS, Figure 2 shows calculated input signals.

A figure of calculated input signals about the AIS based on improved RLS.
The analysis of noise-perturbed quadratic cost with the length N data will be given. After the introduction of the FF, equation (29) can be reformed as follows

So, the noise-perturbed cost’s expectation could be derived as follows

With the increase in N in long-running, the

Thus,
On the other hand, the introduction of FF does not change the basic calculation process of AIS based on traditional RLS, which means that the promoted AIS based on RLSFF keeps the original advantages of low calculation and easy operation. Furthermore, with the improvement of adaptation algorithm, AIS based on RLSFF could be used to calculate the coefficients of input shapers when facing severely time-varying flexible systems.
Experiment on a two-link flexible manipulator
Experimental setup
The performance of AIS based on RLSFF will be tested on a laboratory-scale two-link flexible manipulator (see Figure 3). The material of two links is aluminum, whose modulus of elasticity is 69 GPa. The parameters of the two links and tip mass are illustrated in Table 1. The links are actuated by DC brushless motors with gear drives, and the parameters of the two motors are presented in Table 2. The two joint angles

Two-link flexible manipulator.
Parameters of two links and tip mass.

Parameters of two motors, strain gauges, and amplifier circuits.

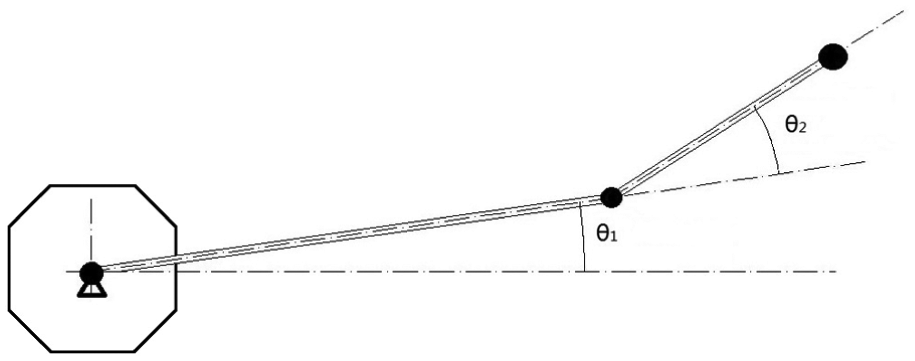
Representation of two angles.
To achieve the rapid velocity response and high angle accuracy, proportional–integral–derivative (PID) feedback controllers of joint angles are used, together with AIS. The servo-control loop and adaptive input shaper’s algorithm are achieved using a DSP 2812 control circuit. The circuit could also achieve JTAG downloading (get the experiment procedures from PC), serial communication interface (SCI) (transport the result to PC), analog-to-digital converters (ADC; receive vibration data from strain gauges), and pulse-width modulation (PWM) output (give control output to DC motors through L298N circuit); so it could control the two motors as well as transport the result of vibration and slew angles to PC in real time. The sampling frequency of the manipulator is 96 Hz, limited by the SCI’s baud rate. The structure of experiment manipulator is shown in Figure 5. Because of the independent control of two joints, the presentation

Experimental settlement of two-link flexible manipulator with AIS.
Servo-control loop parameters of two joints.

According to the design of the input shaper mentioned above, the parameters of the input shapers should be chosen. In an approximate range, the performance of vibration suppression could be similar in different time-delay values.
9
Thus, the duration time K, the number of nonzero coefficients Q + 1, delay time of each impulse

Set values of input shaper.

ISCC: input shaping based on constant coefficient; AIS: adaptive input shaping; RLS: recursive least square; RLSFF: recursive least square with forgetting factor.
There are three input-shaping methods tested in the experiment. ISCC means the same input-shaper design but no adaptation of filter coefficients. AIS based on RLS, and AIS based on RLSFF.
Experimental results
First, the command track of the two joints’ angles should be designed. It is designed as shown in Figures 6(a) and 7(a). One period’s duration is 8 s. In each period, the two joints will rotate a predetermined angle in rest-to-rest and hold for a moment, after that they will rotate back to the original angle in rest-to-rest too. In the first four periods, the rotation angles of two joints in each period are different from the last period, because it could make the dynamics of flexible system varying severely in different periods. However, in the second four periods, the rotation angles will be designed in the same as the first so that the dynamics of the flexible system will repeat similar variation in two four periods. Consequently, there are eight periods in the whole verification experiment. Besides, to show the effects of input shaping and give initialization time of AIS, there is no input shaping of two joints in the first period. Different input shaping will be started from the second period, including ISCC, AIS based on RLS, and AIS based on RLSFF.
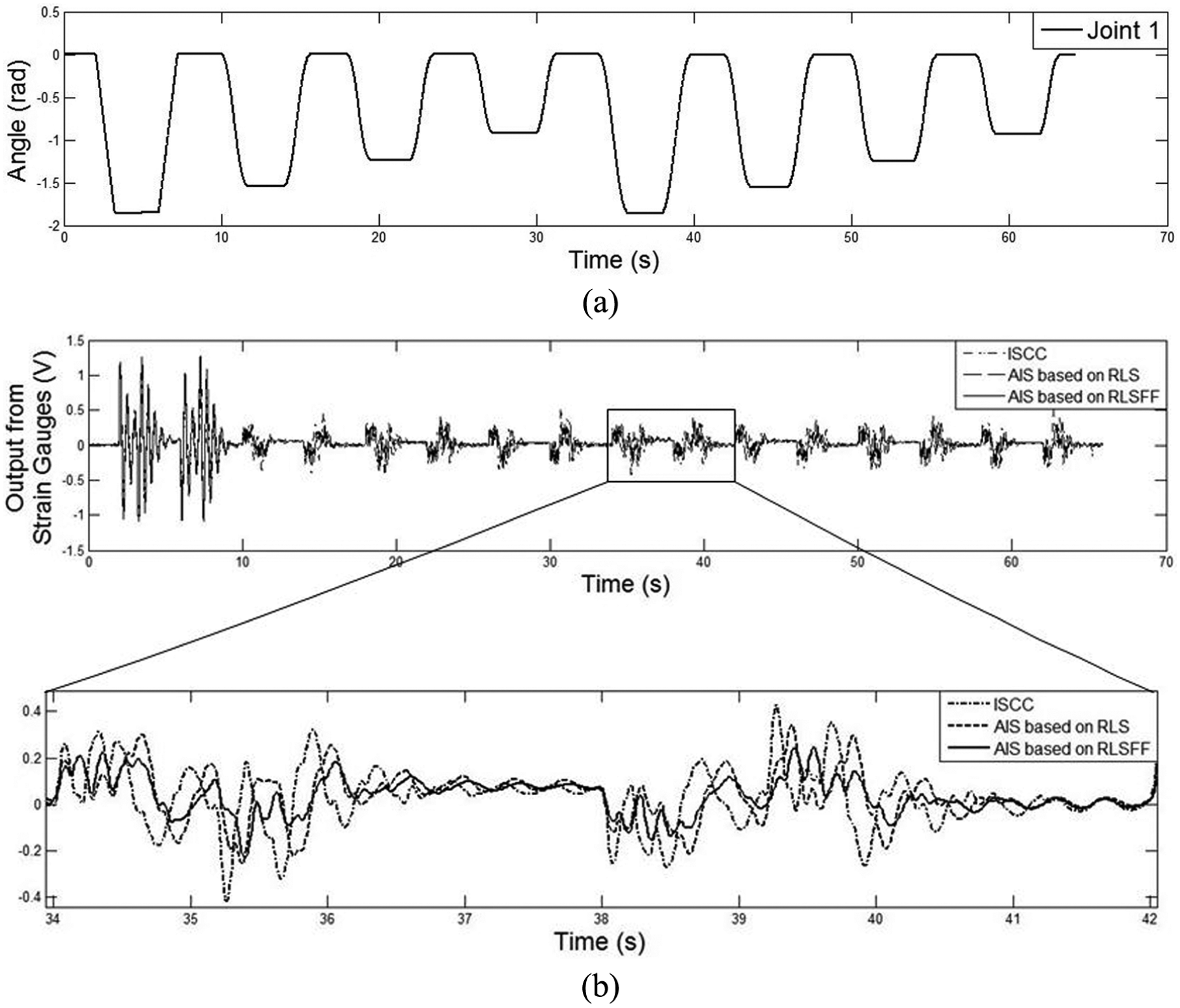
The results of joint 1: (a) angle track of joint 1 and (b) joint 1’s result of vibration suppression with three input-shaping methods.

The results of joint 2: (a) angle track of joint 2 and (b) joint 2’s result of vibration suppression with three input-shaping methods.
The vibration could be measured by the strain gauges; consequently, the curve of the strain gauges’ output could reflect the strain’s variety of the flexible system in linearity. Joint 1’s output from strain gauges with three different methods is shown in Figure 6(b), and joint 2’s output is shown in Figure 7(b).
From the contrast of the first period and the other periods, it is obvious that input shaping suppresses the vibration of flexible system apparently. To give clear contrast of the three different input-shaping methods, the arbitrarily chosen period from 34 to 42 s is magnified. At the same time, the maximum vibration amplitude and the mean square error of the chosen period are given in Table 5.
Results contrast of the vibration with three methods.

ISCC: input shaping based on constant coefficient; AIS: adaptive input shaping; RLS: recursive least square; RLSFF: recursive least square with forgetting factor.
From Table 5, it could be seen that the proposed method of AIS based on RLSFF achieve better performance in vibration suppression. To analyze the source of better performance, the corresponding filter coefficients of AIS are shown in Figures 8 and 9. It could be seen from Figure 8 that the filter coefficients tend to close and could hardly achieve real-time adjustment using AIS based on traditional RLS. After the addition of the FF, the filter coefficients of AIS based on RLSFF are significantly different from AIS based on traditional RLS, and similar change of coefficients could be observed in time 15 to 34 s and 47 to 66 s, corresponding to the same angle tracks in these times. This means that the AIS based on RLSFF could adjust to the time-varying dynamics of the flexible system; thus, it could achieve better performance in vibration suppression. Evidently, it could be observed that there are peaks of coefficients at the beginning of every period. This means that the improvement of adaptability and noise accumulation avoidance is in expense of easier to instability, which should be noted in application.

Filter coefficients in AIS based on RLS: (a) filter coefficients of joint 1 and (b) filter coefficients of joint 2.

Filter coefficients in AIS based on RLSFF: (a) filter coefficients of joint 1 and (b) filter coefficients of joint 2.
Conclusion
In this article, a promoted approach of AIS based on RLSFF is proposed. Facing the problems of insufficient adaptability and noise accumulation that AIS based on traditional RLS has, this article analyzed the source of the problems in mathematics, and introduced the FF on the matrix of old I/O data according to the analysis. The FF could improve the adaptability significantly and avoid the noise accumulation by decreasing the calculation weight of old I/O data in repeated recursive calculation. After that, verification experiments on a two-link flexible manipulator are executed. The results of the verification experiment certified the promotion of AIS based on RLSFF in adaptability and noise accumulation avoidance. Furthermore, the new approach keeps the advantages of little knowledge of the flexible system dynamics, and little computation in adaptation, which means that it could be applied without very high demands on control systems.
Undeniably, the introduction of FF sacrifices to a certain extent stability in order to solve the facing problems. The choice of FF is a trade-off between the stability and tracking ability. To avoid this difficulty, the incorporation of FF adaptation scheme could be the aim of the further research. In addition, it is important to extract the additive noise signal from the error to improve the convergence quality, a number of robust RLS algorithms have been developed in the literature to overcome this problem, such as recursive least M-estimate algorithm or variable FF RLS techniques, so the further research will also focus on taking into consideration the robustness of RLS estimation.
Footnotes
Appendix 1
Appendix 2
The flexible dynamical equations are based on the virtual work and the Lagrange equations
where q = [θ1θ2ζ1ζ2]T is the configuration vector; the two flexible links are capable of rotations θ1 and θ2 and the elastic vibrations ζ1 and ζ2; M, C, and K are the so-called mass, damping, and stiffness matrices, respectively.
The elastic displacement
where yi is the vibration output of ith link, and
where
where
where EIi,
Academic Editor: Crinela Pislaru
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Natural Science Foundation of China (51375034, 61327809).