
Abstract
Accurate prediction for kurtosis of bearing vibration signal is helpful to find out the fault of bearing as soon as possible. Kurtosis prediction of bearing vibration signal based on wavelet packet transform and Cauchy kernel relevance vector regression algorithm is presented in this article. Here, kurtosis of bearing vibration signal can be decomposed into several sub-signals with different frequency ranges based on wavelet packet transform; the prediction models of these decomposed signals can be established by the Cauchy kernel relevance vector regression models with their respective appropriate embedding dimensions, and grid method is used to select the appropriate kernel parameter of each Cauchy kernel relevance vector regression model. The experimental results show that it is feasible for the proposed combination scheme to improve the prediction ability of Cauchy kernel relevance vector regression algorithm for kurtosis of bearing vibration signal.
Keywords
Introduction
Kurtosis of bearing vibration signal can reflect the operating state of bearing, and accurate prediction for kurtosis of bearing vibration signal is helpful to find out the fault of bearing as soon as possible. Artificial neural networks (ANNs) 1 and support vector regression (SVR) algorithm 2 are popular intelligent learning techniques, which have been used as efficient alternative tools to solve the nonlinear prediction problems. SVR is a kind of machine learning method based on the statistical learning theory. 3 Compared with ANNs, SVR has the better generalization performance, particularly under the condition of small training samples. Relevance vector regression (RVR) algorithm is an intelligent learning technique based on sparse Bayesian framework. 4 Compared with SVR, RVR has a sparser representation. What is more, there is no need to set the penalty parameter in RVR, which makes RVR more convenient to use than SVR. Thus, RVR has a better application prospect in kurtosis prediction of bearing vibration signal.
In this article, the hybrid method of wavelet packet transform and Cauchy kernel relevance vector regression (WPT-CauchyRVR) algorithm is presented for kurtosis prediction of bearing vibration signal. Here, kurtosis of bearing vibration signal can be decomposed into several sub-signals with different frequency ranges based on wavelet packet transform (WPT), and the prediction models of these decomposed signals can be established by the Cauchy kernel relevance vector regression (CauchyRVR) models with their respective appropriate embedding dimensions. In addition, as the selection of the kernel parameter of CauchyRVR has a certain influence on its prediction results, grid method is used to select the appropriate kernel parameter of each CauchyRVR model. Thus, each CauchyRVR model of these decomposed signals has appropriate embedding dimension and kernel parameter. The experimental results show that it is feasible for the proposed combination scheme to improve the prediction ability of CauchyRVR for kurtosis of bearing vibration signal.
Cauchy kernel RVR model
Let

where
The RVR model consists of a linear combination of the weighted kernel functions, which can be described as follows

where
In this study, Cauchy kernel can be expressed in the following form

where
Grid method is used to select the kernel parameter
Kurtosis prediction of bearing vibration signal based on WPT-CauchyRVR algorithm
Wavelet packet decomposition of kurtosis of bearing vibration signal
Wavelet transform is an important mathematical tool for nonlinear and nonstationary signal analysis, which includes discrete wavelet transform (DWT), wavelet packet transform (WPT), and so on.5,6 WPT can further decompose the detailed information of the signal in the high-frequency region; 7 thus, WPT is used to decompose the kurtosis of the bearing vibration signals into several sub-signals with different frequency ranges. Here, two-level decomposition for kurtosis of bearing vibration signal is performed based on WPT. In this study, the kurtosis data can be calculated and obtained from the bearing vibration signals in “Bearing Data Set.” 8 Figure 1(a) shows the kurtosis of the bearing vibration signals in case 1, and Figure 2(a) shows the kurtosis of bearing vibration signal in case 2. As shown in Figure 1(b) and Figure 2(b), the four decomposed signals are wavelet packet decomposed signal 1 (WPDS1), wavelet packet decomposed signal 2 (WPDS2), wavelet packet decomposed signal 3 (WPDS3), and wavelet packet decomposed signal 4 (WPDS4). WPDS1 is a low-frequency signal, which reflects the variation trend of kurtosis of bearing vibration signal. Other decomposed signals have higher frequency than WPDS1. As the four decomposed signals have different characteristics, four different prediction models should be established to fit and predict them.
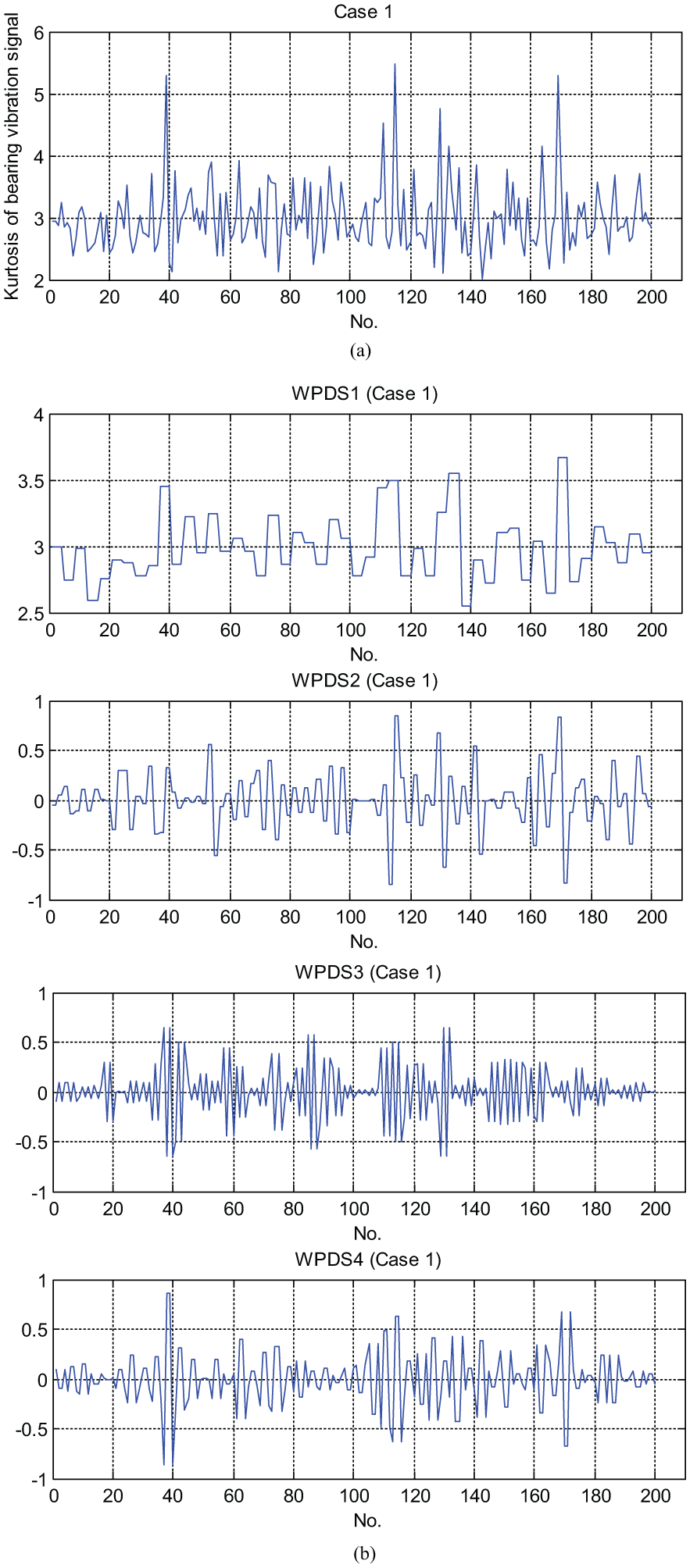
(a) Kurtosis of bearing vibration signal in case 1 and (b) Four decomposed signals of kurtosis of bearing vibration signal in case 1.

(a) Kurtosis of bearing vibration signal in case 2 and (b) Four decomposed signals of kurtosis of bearing vibration signal in case 2.
Predicting the wavelet packet decomposed signals by CauchyRVR
As shown in Figure 1(b) and Figure 2(b), there are lots of data less than zero in WPDS2-WPDS4. In order to predict them conveniently, WPDS2–WPDS4 must be offset to ensure all data in them are more than zero. Here, define 1 as an offset unit, and it is obvious that WPDS2–WPDS4 need one offset unit in the two cases. Thus, in case 1, the offset values of WPDS2, WPDS3, and WPDS4 are set to 1, respectively. The signals after offset processing are defined as offset signals, and the offset WPDS2–WPDS4 in case 1 can be shown in Figure 3. In case 2, the offset values of WPDS2, WPDS3, and WPDS4 are set to 1, respectively. The offset WPDS2–WPDS4 in case 2 can be shown in Figure 4.

WPDS1 and offset WPDS2–WPDS4 in case 1.

WPDS1 and offset WPDS2–WPDS4 in case 2.
All the data in each wavelet packet decomposed signal (or offset signal) described in Figure 3 and Figure 4 are respectively pre-processed as follows:

where m denotes the embedding dimension,
Generally, in order to make the prediction model have good prediction ability, the embedding dimension m is set to bigger value for low-frequency signal and is set to smaller value for high-frequency signal. As WPDS1 is a low-frequency signal, the embedding dimension of WPDS1 is set to 9 to create its prediction model here; and the frequencies of other wavelet packet decomposed signals have higher than WPDS1, and the embedding dimensions of offset WPDS2–WPDS4 are set to 7, 5, and 5 to create their prediction models, respectively, in this study. Then, grid method is used to obtain the Cauchy kernel parameters of the CauchyRVR prediction models of WPDS1, offset WPDS2–WPDS4, respectively, and establish the CauchyRVR prediction models of WPDS1, offset WPDS2–WPDS4, respectively. The prediction results of WPDS2–WPDS4 can be obtained by subtracting the offset values of the prediction results of offset WPDS2–WPDS4, respectively. Finally, the kurtosis prediction results of bearing vibration signal can be obtained by the combination of the prediction results of the four wavelet packet decomposed signals.
Experimental analysis for kurtosis prediction of bearing vibration signal based on WPT-CauchyRVR algorithm
In this study, 200 kurtosis data of bearing vibration signal are employed in each case, among which No. 1–185 kurtosis data of bearing vibration signal are used as the training data, and No. 186–200 kurtosis data of bearing vibration signal are used as the testing data. In the proposed WPT-CauchyRVR method, grid method is used to select the kernel parameter
In order to show the superiority of the proposed WPT-CauchyRVR method, 400 CauchyRVR models with different embedding dimensions and Cauchy kernel parameters are employed to compare with the proposed WPT-CauchyRVR method. The value ranges of the embedding dimensions of these CauchyRVR models are [1, 10], and the intervals between the adjacent values of the embedding dimensions of these CauchyRVR models are 1. The value ranges of the Cauchy kernel parameters of these CauchyRVR models are [0.1, 4], and the intervals between the adjacent values of the Cauchy kernel parameters of these CauchyRVR models are 0.1.
In case 1, the mean absolute percentage prediction errors for kurtosis of bearing vibration signal of the 400 CauchyRVR models can be shown in Figure 5, and the minimum mean absolute percentage prediction error of each embedding dimension of the range [1, 10] among the 400 CauchyRVR models can be shown in Figure 6. By the comparison of the mean absolute percentage prediction errors for kurtosis of bearing vibration signal among the 400 CauchyRVR models, the CauchyRVR model whose embedding dimension is 7 and parameter’s value of the Cauchy kernel is 0.3 has the smallest mean absolute percentage prediction error among the 400 CauchyRVR models. The comparison of the prediction results for kurtosis of bearing vibration signal between WPT-CauchyRVR and CauchyRVR (m = 7, η = 0.3) is given in Figure 7.

Mean absolute percentage prediction errors for kurtosis of bearing vibration signal of the 400 CauchyRVR models in case 1.
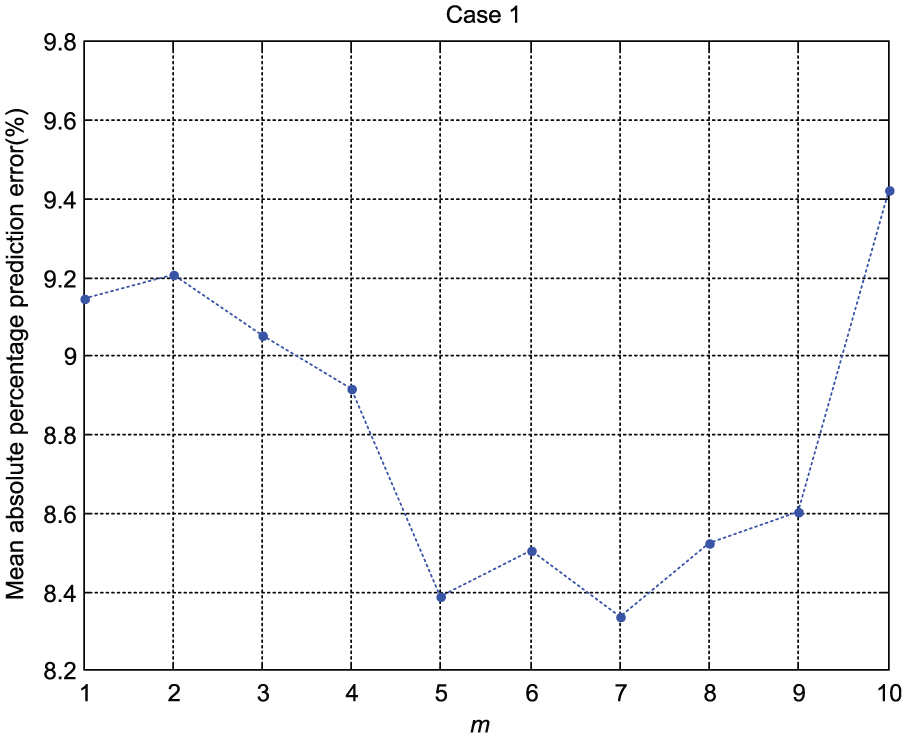
Minimum mean absolute percentage prediction error of each embedding dimension of the range [1, 10] among the 400 CauchyRVR models in case 1.

Comparison of the prediction results for kurtosis of bearing vibration signal between WPT-CauchyRVR and CauchyRVR (m = 7, η = 0.3) in case 1.
In case 2, the mean absolute percentage prediction errors for kurtosis of bearing vibration signal of the 400 CauchyRVR models can be shown in Figure 8, and the minimum mean absolute percentage prediction error of each embedding dimension of the range [1, 10] among the 400 CauchyRVR models can be shown in Figure 9. By the comparison of the mean absolute percentage prediction errors for kurtosis of bearing vibration signal among the 400 CauchyRVR models, the CauchyRVR model whose embedding dimension is 7 and parameter’s value of the Cauchy kernel is 0.1 has the smallest mean absolute percentage prediction error among the 400 CauchyRVR models. The comparison of the prediction results for kurtosis of bearing vibration signal between WPT-CauchyRVR and CauchyRVR (m = 7, η = 0.1) is given in Figure 10.

Mean absolute percentage prediction errors for kurtosis of bearing vibration signal of the 400 CauchyRVR models in case 2.
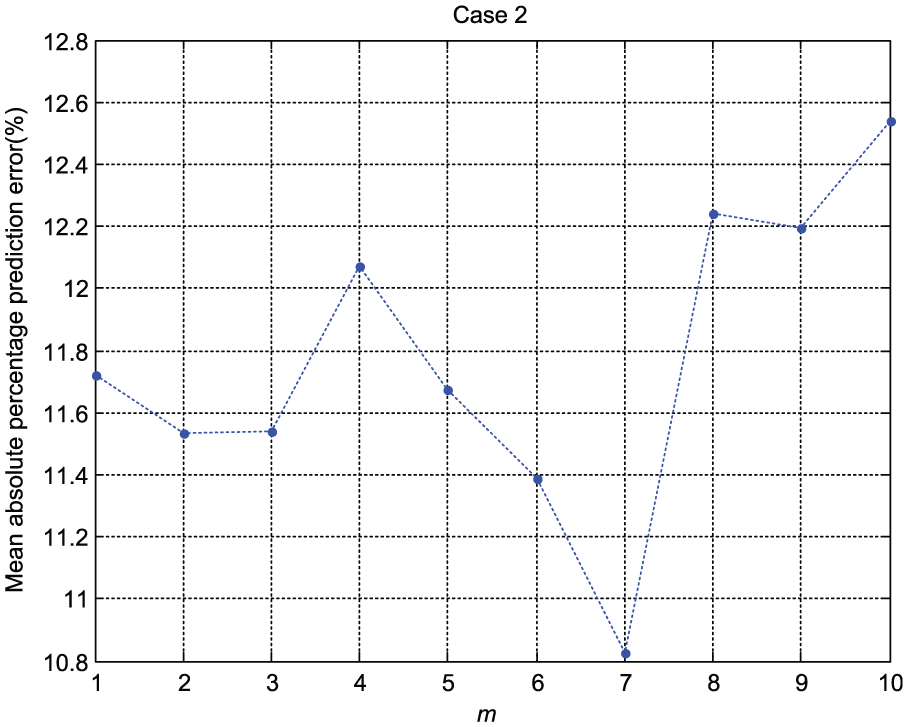
Minimum mean absolute percentage prediction error of each embedding dimension of the range [1, 10] among the 400 CauchyRVR models in case 2.
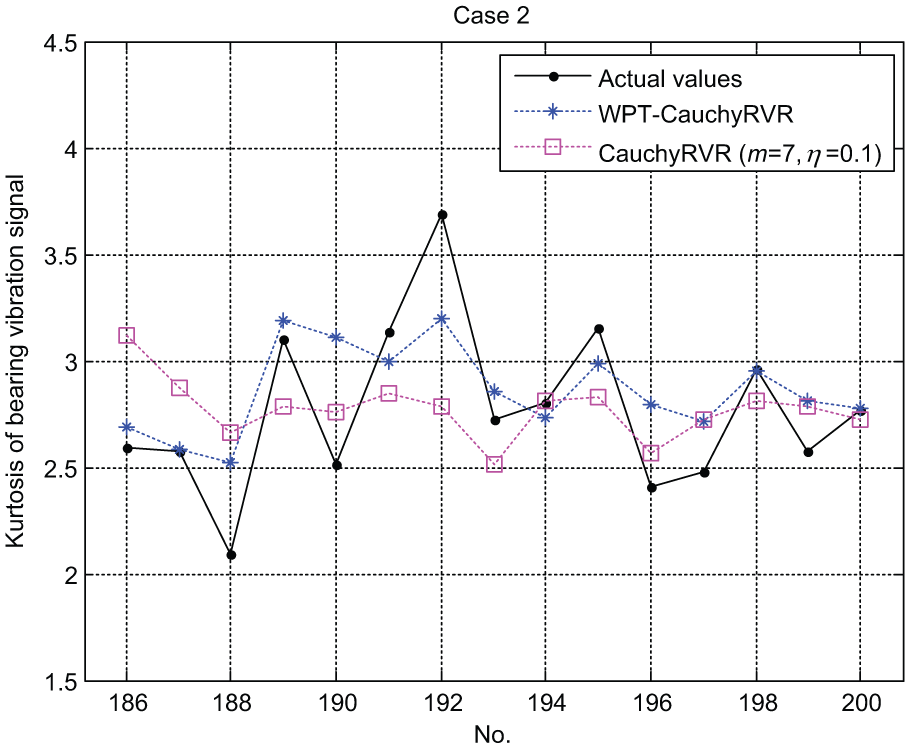
Comparison of the prediction results for kurtosis of bearing vibration signal between WPT-CauchyRVR and CauchyRVR (m = 7, η = 0.1) in case 2.
As shown in Figures 7 and 10, the prediction curves of the proposed WPT-CauchyRVR method can reflect the future variation trend of kurtosis of bearing vibration signal better than those of the CauchyRVR models. Table 1 gives the comparison of the mean absolute percentage prediction errors for kurtosis of bearing vibration signal between WPT-CauchyRVR and the CauchyRVR model with the minimum mean absolute percentage prediction error of the 400 CauchyRVR models in case 1, which indicates that the mean absolute percentage prediction error of WPT-CauchyRVR for kurtosis of bearing vibration signal is smaller than that of the CauchyRVR model with the minimum mean absolute percentage prediction error of the 400 CauchyRVR models in case 1; Table 2 gives the comparison of the mean absolute percentage prediction errors for kurtosis of bearing vibration signal between WPT-CauchyRVR and the CauchyRVR model with the minimum mean absolute percentage prediction error of the 400 CauchyRVR models in case 2, which indicates that the mean absolute percentage prediction error of WPT-CauchyRVR for kurtosis of bearing vibration signal is smaller than that of the CauchyRVR model with the minimum mean absolute percentage prediction error of the 400 CauchyRVR models in case 2.
Comparison of the mean absolute percentage prediction errors for kurtosis of bearing vibration signal between WPT-CauchyRVR and the CauchyRVR model with the minimum mean absolute percentage prediction error of the 400 CauchyRVR models in case 1.

WPT-CauchyRVR: wavelet packet transform and Cauchy kernel relevance vector regression; CauchyRVR: Cauchy kernel relevance vector regression.
Comparison of the mean absolute percentage prediction errors for kurtosis of bearing vibration signal between WPTCauchyRVR and the CauchyRVR model with the minimum mean absolute percentage prediction error of the 400 CauchyRVR models in case 2.

WPT-CauchyRVR: wavelet packet transform and Cauchy kernel relevance vector regression; CauchyRVR: Cauchy kernel relevance vector regression.
The experimental results show that it is feasible for the proposed combination scheme to improve the prediction ability of CauchyRVR for kurtosis of bearing vibration signal.
Conclusion
Kurtosis prediction of bearing vibration signal based on WPT-CauchyRVR algorithm is presented in this article. Here, kurtosis of bearing vibration signal can be decomposed into several decomposed signals with different frequency ranges based on WPT; the prediction models of these decomposed signals can be established by the CauchyRVR models with their respective appropriate embedding dimensions, and grid method is used to select the appropriate kernel parameter of each CauchyRVR model. The experimental results show that it is feasible for the proposed combination scheme to improve the prediction ability of CauchyRVR for kurtosis of bearing vibration signal.
Footnotes
Academic Editor: Sang-Wook Kang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This project was supported by the National Natural Science Foundation of China (grant no. 51305076).