
Abstract
Non-strapdown seeker disturbances which involve counter-electromotive force, spring restoring torque, and friction torque can corrupt the seeker tracking accuracy and degrade the missile guidance performance. In this article, the effects of guidance parameters and disturbances on the guidance stability and the miss distance are analyzed. It is shown that these disturbances have a pronounced deterioration in the guidance performance for the anti-air missile under high altitude and head-on interception. A new approach for disturbance rejection using disturbance observer–based control is presented. Disturbances in seeker stabilizing loop are estimated by the observer which has synthetic inputs based on the available seeker measurement signals. The estimates are fed back into the seeker inner loop to compensate the disturbances, and an additional loop is applied to improve the effect of disturbance compensation. The performance of the approach under non-nominal condition is analyzed. Simulation studies are performed to examine the effect of this control scheme. The result shows that this approach can effectively reduce the influences of corrupting disturbances and significantly improve the miss distance performance.
Introduction
In the missile homing guidance, the line-of-sight (LOS) rate is required to achieve proportional navigation. This information is often extracted by the seeker, which is mounted in the front of the missile. The optical sensors (such as infrared (IR), television, and laser) have heretofore been used to detect target. To achieve a high tracking accuracy, the sensor axis should be stabilized to point toward the target regardless of the body motion of missile. In a single-plane analysis, the relevant angles are shown in Figure 1.
Angles in a single plane.
In Figure 1,
With different target tracking stabilization architectures, seekers are mainly divided into three types: non-strapdown seeker, semi-strapdown seeker, and fully strapdown seeker. In a non-strapdown seeker, the optical sensor is suspended in a two-axis gimbal system, the measurement
This article focuses on the disturbance rejection technique based on the non-strapdown seeker. The non-strapdown seeker contains two feedback loops: tracking loop and stabilizing loop. Major functions of the tracking loop are to maintain the BSE angle
The seeker output is corrupted by several disturbances during the flight, such as random error, noise, counter-electromotive force (CEMF), spring restoring torque (SRT), and friction torque (FT). Among these factors, CEMF, SRT, and FT introduce base motion into the seeker control system, corrupting seeker output accuracy and degrading missile precision.
The disturbance effect has been focused on for several years. The influence of radar radome slope error was first proposed by Nesline and Zarchan.1,2 Furthermore, the effect of the parasitic loop of semi-strapdown seeker induced by the CEMF, the friction coefficient, and the sensor dynamic mismatch on the stability and miss distance was analyzed by Song Jianmei. 3 In the study by Taylor and Price, 4 it was shown that the gimbal seeker tracking accuracy was quite sensitive to disturbance torque inputs. The miss distance was also given with the existence of seeker disturbance torque under nominal values of guidance parameters. 5 In guidance system design, guidance parameters are normally determined without seeker disturbances. However, the seeker disturbance effect may be amplified with unsuitable values of guidance parameters. Therefore, the relationship between the missile guidance performance and main guidance parameters should be provided with the existence of gimbal seeker disturbances.
In practice, there are two ways to improve tracking accuracy in the face of seeker disturbances: the first is to increase the stabilizing loop gain 6 and the other is to insert a compensator in the stabilizing loop. However, the stabilizing loop bandwidth is limited by hardware such as servo motor and rate gyro and also the seeker would become sensitive to sensor noise with these two methods. A seeker error-based loop decoupling filter was discussed by RN Bhattacharjee et al., 7 and this filter could significantly reduce seeker disturbances, but the seeker performance was decreased more or less because of high-frequency glitches. Chun-Liang Lin 5 developed a feedforward control employing a multilayer neural network to eliminate the seeker disturbance torque.
Another approach is provided to handle this disturbance problem using disturbance observer–based control (DOBC). DOBC has been developed and applied in engineering in the recent years.8,9 In the DOBC approach, the disturbance is estimated by the disturbance observer and then is used to compensate the disturbance effects by feedback or feedforward control. It can greatly reduce the disturbances without significantly changing the nominal performance of the existing system. Smita Sadhu 10 extended this method for LOS rate estimation by treating the input signal of the seeker as a disturbance. Although this extension simplified the DOBC structure and did not require any additional sensor, the estimated output is degraded by mismatch dynamics of the mathematic model with the physical system, which is evaluated in simulation.
This article focuses on the effect of seeker disturbances (i.e. CEMF, SRT and FT) on missile guidance performance and then demonstrates a new control architecture that employs DOBC compensation to eliminate these disturbances. The disturbance estimates are extracted from available seeker measurement signals and then applied to compensate the disturbance effects. The different architecture from the nominal DOBC is that an additional loop (AL) is added inside of the seeker stabilizing loop to improve the compensation effect. The compensation effect is evaluated by the stability and miss distance analyses. The sensitivity of the performance of DOBC to seeker dynamic uncertainties is analyzed. Simulation results show that the seeker tracking quality and the guidance accuracy are significantly improved by the DOBC compensation approach.
Mathematical model of missile guidance system with gimbal seeker
The simplified missile lateral guided model is shown in Figure 1. Definitions and nominal values of the model parameters are listed in Table 1. In Figure 2, the BSE
Nominal values of guidance parameters.
Missile guidance and control system.
Assumption 1
The guidance filter is a simple first-order dynamic system with the time constant
Seeker glint noise

In Figure 2,
CEMF
CEMF

where
SRT
SRT

where
FT
The slip-stick FT

where

Nonlinear disturbance torque model: (a) spring restoring torque and (b) friction torque.
Effect of seeker disturbances on missile performance
The SRT and FT are physically nonlinear, and for studying the effect of these disturbances on guidance performance, the disturbance torque can be simplified to the linear model, as shown in Figure 4.

Linearized disturbance torque model.
In Figure 4,
The superposition principle is satisfied with the linearized disturbance models; therefore, the seeker output

Equivalent guidance model.
Stability analysis of parasitic loop
The transfer function of the parasitic loop with LOS rate

where

The denominator of the equation is a sixth-order polynomial
The stability regions of the parasitic loop are analyzed under assumption 2.
Assumption 2
The distance range between the missile and target is infinite, such that the time-to-go
For

Stability regions of the parasitic loop with disturbances: (a) CEMF, (b) SRT, and (c) FT.
Miss distance analysis
The miss distance is analyzed using adjoint method, 12 and the adjoint model of guidance system is shown in Figure 7.

Adjoint model of missile guidance system.
The ratio of miss distance

where
Values of the parameters are shown in Table 1. Miss distances due to the glint noise are shown in Figure 8. The results show that the seeker disturbances would degrade the guidance accuracy. When the guidance system is stable, 5-s guidance time is sufficiently large to guarantee the miss distance reaching its asymptotic value.

Miss distance varying with guidance time: (a) CEMF, (b) SRT, and (c) FT.
Assuming that Tg = 0.3 s and TGN = 0.15 s, the effect of the guidance parameters and the disturbances on miss distances for 5 s guidance time TF is given in Figure 11(a)–(c) (blue surface). It can be seen that the miss distance becomes larger with the increase in disturbance coefficients (
Disturbance compensation with DOBC
As described previously, seeker disturbances seriously degrade the guidance performance. Compensation must be included to enhance the seeker tracking accuracy.
CEMF, SRT, and FT disturbances can be integrated into an equivalent disturbance torque d

Typically, the DOBC generates an estimate of the disturbance


Disturbance compensation scheme: (a) standard configuration and (b) seeker disturbance compensation based on DOBC.
It is easy to deduce the transfer function from disturbance d input to y output

The transfer function from input r to y output is

Two cases—
If
If
The architecture of seeker disturbance compensation based on DOBC is presented in Figure 9(b). The observed value

Without AL (red line) in Figure 8(b), the transfer function

It can be seen that if the bandwidth of the low-pass filter is infinite
The transfer function
Compare

where
The transfer function

Under the nominal condition, that is,

The above equation is equal to the ideal seeker dynamic function. It reflects that the disturbance compensation method does not change the seeker dynamics significantly. The only to-be-designed parameter is the time constant
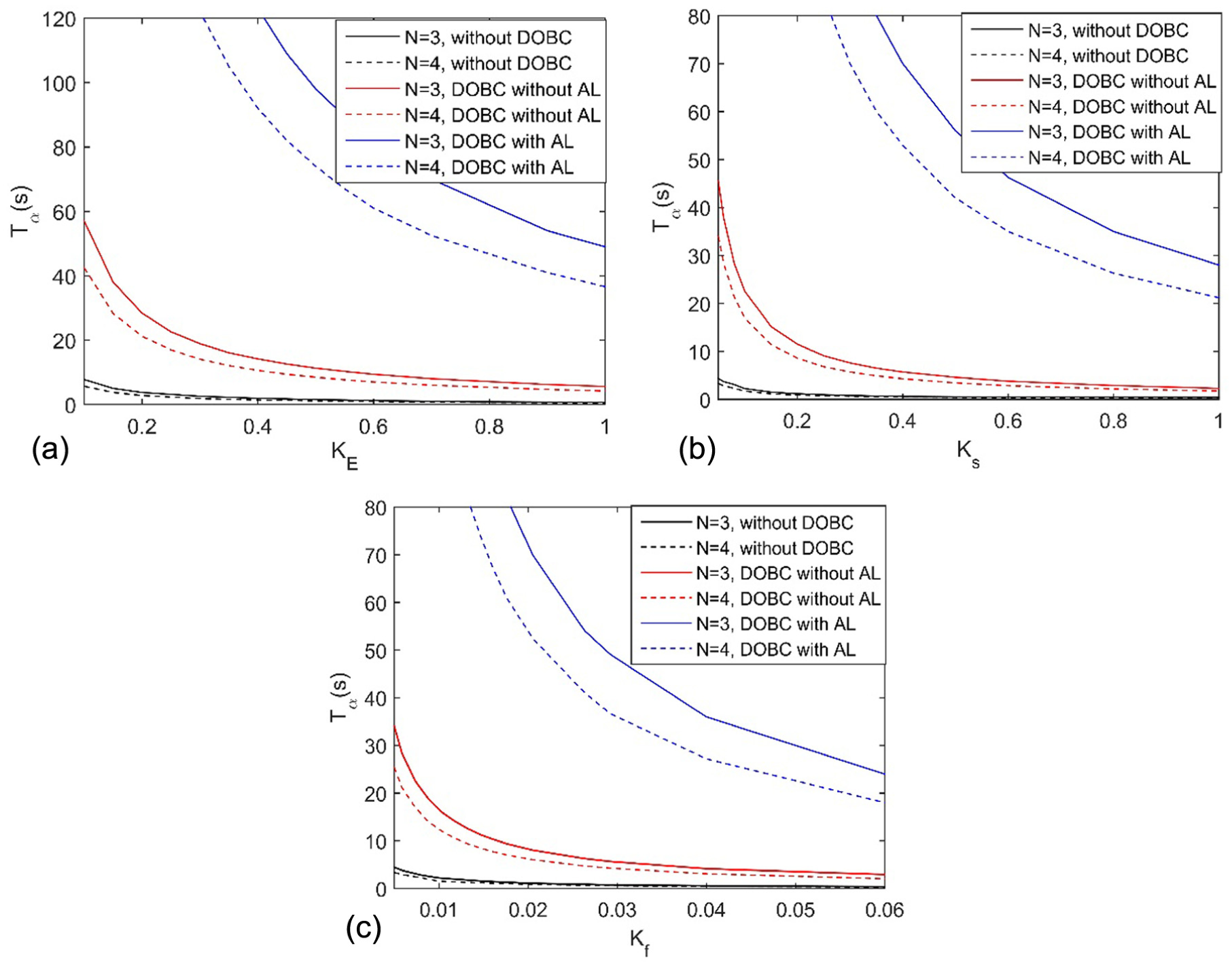
Comparison of parasitic loop stability regions with and without DOBC compensation: (a) CEMF, (b) SRT, and (c) FT.
For Tg = 0.3 s, TGN = 0.15 s, and TF = 5 s, the improvement of missile guidance precisions with the DOBC compensation is presented in Figure 11. The guidance system is excited with glint noise
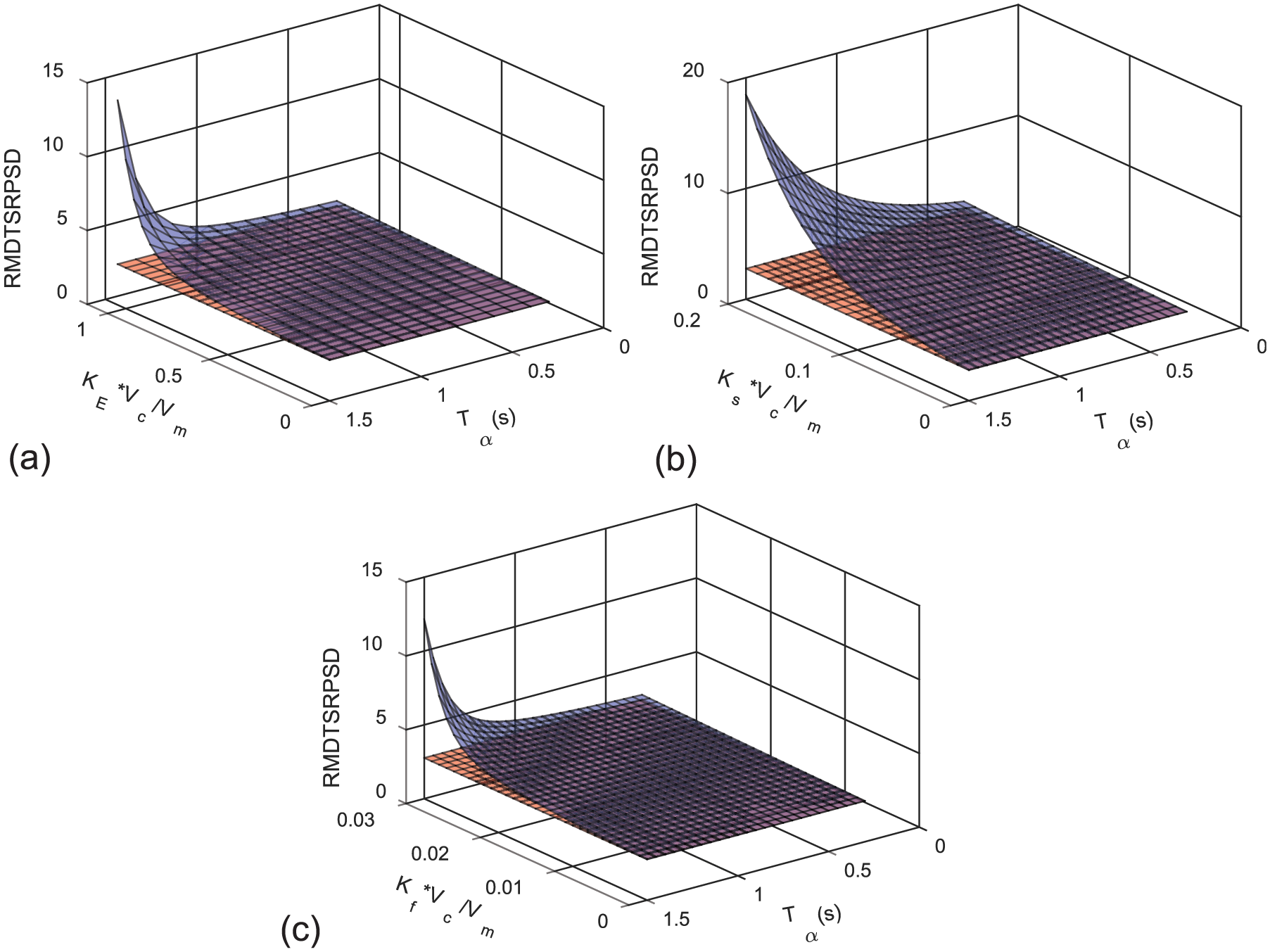
Comparison of miss distances with and without DOBC: (a) CEMF, (b) SRT, and (c) FT.
Sensitivity analyses under non-nominal conditions
In practical applications, the seeker model may not be known exactly. Some unmodeled dynamics, such as fast dynamics of sensors and nonlinear dynamics of gimbal, perturb the seeker response from its nominal value and then derive estimation and compensation errors in DOBC. In this section, we discuss the sensitivity of the performance of DOBC to seeker dynamic uncertainties.
The previous section indicates that DOBC is designed based on nominal values
Assumption 3 (model uncertainties)
Seeker model uncertainties are investigated by satisfying the following assumptions:
Model uncertainties are considered to be gain perturbation and phase perturbation.
Gain perturbation is presented by the additive uncertainty, and real dynamics

where
The phase perturbation is presented by the multiplicative uncertainty, which is approximated by an equivalent time delay, and

where
(d) Effects of model uncertainties are analyzed within the frequency range
Property 1 (seeker dynamics)
In an acceptable design, the seeker dynamics satisfies the following properties within the frequency range
The open-loop transfer function of the stabilizing loop
The amplitude of the seeker (or tracking loop) closed-loop transfer function
The gain crossover frequency
The sensitivity relations of the performance of DOBC to dynamic deviations are presented by

where
It is seen that smaller values of
Additive uncertainty
Effect of additive uncertainty on
Using equation (19), the true open-loop dynamic

where
Inserting equation (23) into equation (17) gives

Note that with Property 1(b), it is easy to prove that

Effect of additive uncertainty on
Inserting equation (19) into equation (15) gives


Under Assumption 3(b),

Seeker output with DOB compensation: (a) comparison of seeker outputs with and without DOBC, (b) comparison of DOB compensation and ELOSDOB with 20% mismatch in seekers dynamic, (c) comparison of DOB compensation and ELOSDOB with delay in seeker dynamics, (d) seeker output induced by disturbance input with different time constant of low-pass filter, and (e) seeker output with measurement noise.
Multiplicative uncertainty
From equation (20), the true dynamics



Effect of multiplicative uncertainty on
Combining equations (31) and (26) gives

In equation (32),
Effect of multiplicative uncertainty on
From equation (28), we have

Case study
First, the seeker response is analyzed without considering both the outer parasitic loop and the guidance loop. Then, the parasitic loop is added into the discussion. Finally, the miss distance is simulated for the whole guidance system. Values of the parameters are shown in Table 1, and nonlinear disturbances are chosen as equations (3) and (4). Three sets of nonlinear disturbance coefficients are employed, shown in Table 2.
Parameters of nonlinear disturbance.

CEMF: counter-electromotive force; SRT: spring restoring torque; FT: friction torque.
Seeker response simulation
Without considering the outer parasitic loop and the guidance loop, the single seeker can be considered as a two-input one-output system with the LOS rate
Values of disturbances are chosen as the first set in Table 2, and the time constant of the low-pass filter is
The seeker output
The sensitivity of this approach to the deviation of nominal open-loop transfer function

Smita Sadhu
10
used simplified DOB method to eliminate the effect of disturbances on the seeker outputs. In this approach, the true LOS rate
The results of simulation with 20-ms time delay in stabilizing loop by two methods are shown in Figure 12(c). The similar conclusion shows an outperformance for DOBC.
According to the transfer function of the seeker output
With zero mean, 0.3°/s standard deviation band-limited (10 Hz) white seeker gyro measurement noise, the seeker output is shown in Figure 12(e).
Parasitic loop response simulation
The analysis of the parasitic loop response is to check the seeker output and missile acceleration response to the LOS rate input with the closed disturbance feedback loop.
The guidance parameters are listed in Table 1. With 0.2 Hz, square ware of 10°/s amplitude LOS rate

Parasitic loop response with DOBC compensation: (a) comparison of seeker outputs with DOBC compensation and without compensation and (b) comparison of acceleration response with DOBC compensation and without compensation.
Miss distance simulation
The whole missile guidance system is analyzed to evaluate the effect of the DOBC compensation approach on miss distance. Three sets of nonlinear disturbances shown in Table 2 are employed.
The guidance time during
Figure 14(a) illustrates the result of the disturbance observer output

Simulation result of guided system: (a) estimated disturbance by observer, (b) seeker output with DOB compensation, and (c) miss distance.
Monte-Carlo guidance simulation has been used to calculate miss distance as a function of engagement time with glint noise input. For each disturbance set shown in Table 2, the guidance time changes from 0 to 5 s with 0.1-s time step, and 1000 simulations are applied for each time step. The miss distance at each time step is obtained by averaging the 1000 simulation results. Miss distances are shown in Figure 14(c). It is obvious that miss distances are greatly reduced by the DOBC compensation approach.
Conclusion
The effect of seeker disturbances, which involve CEMF, SRT, and FT, on missile guidance stability and miss distance has been studied in this article, and the relationship between guidance performance and main guidance parameters is provided. The analysis shows that the guidance performance would be degraded by these disturbances, especially in situations of large guidance coefficient and head-on interception.
A new approach for disturbance rejection in seeker stabilizing loop using DOBC technique has been presented. This observer can estimate the disturbance accurately; with the compensation of DOBC, the disturbance is greatly reduced. Different from the normal DOBC architecture, an AL is added inside the seeker stabilizing loop to improve the compensation effect. The stability and miss distance analyses are repeated to evaluate the compensation effectivity. This scheme does not require any additional sensor. The sensitivity analyses are presented to investigate the effects of model uncertainties on the performance of proposed approach.
Simulation studies are performed to assess the performance of this compensation method. Compared to the case without compensation, the results show that this compensation controller can provide a significant improvement in seeker tracking accuracy and greatly reduce the missile miss distance.
Footnotes
Acknowledgements
The authors would like to thank the reviewers for their valuable suggestions.
Academic Editor: Nasim Ullah
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.