
Abstract
This article deals with wireless model predictive control of a water-level control system. The objective of the model predictive control algorithm is to constrain the control signal inside saturation limits and maintain the water level around the desired level. Linear modeling of any nonlinear plant leads to parameter uncertainties and non-modeled dynamics in the linearized mathematical model. These uncertainties induce a steady-state error in the output response of the water level. To eliminate this steady-state error and increase the robustness of the control algorithm, an integral action is included in the closed loop. To control the water-level system remotely, the communication between the controller and the process is performed using radio channel. To validate the proposed scheme, simulation and real-time implementation of the algorithm have been conducted, and the results show the effectiveness of wireless model predictive control with integral action.
Introduction
Model predictive control (MPC) or receding-horizon control has been widely used in the industry due to its capabilities to solve constrained control problems.1–3 The idea behind the MPC approach is to use explicitly the mathematical model of the plant to predict the future of the state as a function of moving sequences of the control signal. Therefore, the predicted tracking error is minimized over a fixed future horizon, while the objective function is subject to constraints on the state of the process and the control signal.
In many industrial plants, sensors and actuators are distributed in different places in the factory. The centralized controller is connected to them using wires. In such structure, the cost of the control process is high; the maintenance operation is complex and hard. To overcome these problems, wireless technology has been included in the control loop.4–6 Indeed, there are several advantages in including wireless technology in industrial control applications, such as low cost of the control process, more flexible structure, and easy fault handling. 4 However, there are some drawbacks against including wireless technology in the control loop, for instance, security, reliability, and especially the induced time delays when the controller commands many plants at the same time (wireless networked control systems (NCSs)). In our case, this article deals with wireless control of a single process; thus, the induced delay is negligible with regard to the dynamic of the process.
In this work, linear MPC is used to control the water level in a tank using wireless link communication between the plant and the controller. It is noted that liquid-level control system has been widely used in many industrial applications such as water treatment industries and food processing. Therefore, such industrial processes require liquid to be pumped and stored in a tank, while the level of this liquid in the tank should be maintained at the desired level.
Process control via wireless channels (radio frequency (RF) channels) has been used in many applications, especially to control a swarm of mobile robots. Pohjola et al.
7
have considered the control of a group of mobile robots in order to maintain a given formation using wireless communication between different nodes (mobile robots). Navigation of each robot is done autonomously. However, for collaboration purpose, robots are required to communicate each other wirelessly. In Zhan et al.,
8
unmanned aerial vehicles (UAVs) are used as relays between the ground station and a network base station. The objective of using UAVs for networked communications is that they can be quickly deployed as a relays to extend coverage and improve network connectivity. The work presented in Kottenstettle and Antsaklis
9
deals with the case when actuators are subject to constraints with communication time delays. The closed-loop system becomes unstable. The authors proposed an inner-product recovery block to maintain
Wireless model predictive control (WMPC) has also been used in many industrial processes. For instance, Lino et al. 12 have used MPC to the event-triggered control scheme to the wireless NCS to minimize energy consumed by different wireless nodes. Constrained linear MPC has been also utilized in a hybrid dynamic laboratory process with wireless sensor feedback. 13 Witrant et al. 14 have introduced a new industrial case on automation for large-scale systems with high environmental impact: the mining ventilation control systems. The main problems encountered in such system are the safety of miners and the consumed energy. The proposed solution is based on wireless nonlinear MPC for both ventilation control and minimization of the energy consumed by different distributed fans.
For many years, most of the research involving in (with wires or wireless) NCSs concentrated on two main directions. The first one is related to the design and analysis of the network controllers that take into account the time delay induced by the network communications. The second one is focused on the development on different protocols to reduce the effect of the time delay on the performance of the NCSs. It is known that the tracking performance of the NCSs can be easily decreased due to unbounded delays and unpredictable packet losses. Furthermore, the stability of the closed-loop NCS is compromised in this case. Ulusoy et al. 15 have combined two directions to solve the problem induced by unbounded delays and unpredictable packet losses. They have proposed a novel wireless model based on predictive NCSs and an implementation of the cooperative medium access control protocol, which work jointly to solve the problems, cited previously of a NCSs over wireless communication links.
Proportional–integral–derivative (PID) and linear controllers are widely used to control industrial liquid-level processes. 16 Although, in real physical systems, the applied control signals should lie inside a tolerated range defined by the used actuators. In this case, a simple saturation function is used to keep the control signal inside the desired range. However, the controller becomes nonlinear, and the deduced control signal is not optimal. 17 MPC has the advantage to include explicitly the constraints on the state variable and control signal in the design of the controller (constrained optimization). Therefore, the obtained control signal is optimal in this case. 17 We have to mention that there are other methods based on constrained adaptive control approaches that can solve the constrained control problem posed in this work.18–21
In this work, the model predictive controller with constraints on the control signal is used to control the water level of a tank over an RF link. We note that we are using only a single system instead of multiple systems (network). The time delay induced by the communication between the plant and the controller is very small and has no effect on the stability and tracking performance of the process in closed loop. To increase the robustness of the controller against the modeling uncertainties and noise disturbances, an integral action is incorporated in the loop.
This article is organized as follows: section “Linear MPC” provides an overview of the MPC of discrete-time linear systems. Section “Water-level system model” deals with the water-level plant modeling. The MPC with integral action is designed for the water-level system in this section. Wireless communication technology is briefly discussed in section “Wireless control architecture.” Simulation and real-time implementation of the proposed scheme is presented in section “Simulation and experimental results.” Finally, we complete this article by some discussions and conclusion.
Linear MPC
Consider a physical system described by the following linear discrete-time invariant model

where
Assumptions
The pair (A, B) is controllable.
The state
The aim of the MPC is to determine the N control sequences
where
J-step predictor
In order to solve the optimization problem (2), the dynamic equation of the process (1) is used to evaluate the j-step predictor of the tracking error which is given by

where
Thus, incorporating equation (3) into equation (2), the objective function can be written under the quadratic compact form

where
The predicted tracking error can be decomposed as

where

The cost function (4) reaches its minimum

The applied control signal is given by
Constraints handling
The main advantage of the MPC is its ability to incorporate explicitly the constraints on the control signal and/or the state of the process in the problem formulation. Magnitude constraints on the input of the plant can be expressed as follows:

Therefore, for the constrained case, MPC becomes a quadratic optimization problem with linear constraint, and it is formulated as

Such that
This optimization is a convex problem; this is due to the quadratic cost function and linear constraints. Various numerical procedures are available to solve efficiently the optimal control problem. 22
Integral action
In the real world, most of processes are not linear and are subject to parameter variations and disturbances. In the MPC, the mathematical model is used to design the control law. Inaccurate linear model is subject to steady-state error in closed loop. To eliminate this steady-state error, an integral action is incorporated in the control loop.
Let denote the difference in the state variable by
Define the augmented state by

where
The MPC of the augmented system can be reformulated as

Such that
Note that the regulation error of the augmented system is
The predicted tracking error can be decomposed as

where

The optimal solution of the unconstrained optimization (9) is

The applied control signal to the system (1) is given by

This is the receding-horizon principle.
The quadratic programming problem (9) leads to MPC with integral action. The solution of this optimization problem is the rate of change of the control signal

or in compact form

Water-level system model
The water-level control system used in this work, which is shown in Figure 1, consists of a tank with a small hole in the bottom of the tank which allows the water to flow from the tank to the container below the process. The water moves to the tank from the container by an electrical pump controlled by an actuator (DC motor). The level of the water

Water-level control system.
The mathematical model of the liquid-level system is basically a first-order system. According to the mass balance of the flow input and output of the water from the tank, we have the following relation

where
The flow rate
Hence, the mathematical model of the liquid-level control becomes

where
When the input flow rate is constant
Around this equilibrium point

where
The previous equation can be expressed as

where
Since the effect of the uncertainty term

where
Wireless control architecture
In this work, IEEE 802.11b wireless network has been used for communication between the water-level control system and the controller. Transmission control protocol (TCP) or Internet protocol (IP) has been utilized to ensure the data delivery, while C++ language to implement the wireless model predictive controller. The structure of the wireless control loop is shown in Figure 2 and contains the following items:
Personal computer (PC) used as a server. To enable communication with the client (remote controller), the PC is connected via Ethernet LAN to WLAN router.
The water-level control system is connected to the server via MF624 data acquisition card. The sensor and the actuator are co-located on the same node. Thus, the PC reads the sensor output value
Laptop, which is equipped with wireless LAN adapter, is set as client (remote control). The client receives the water level
WLAN router (Linksys WRT54GL) built-in wireless-G (802.11b) access point allows up to 32 wireless devices to connect to network at 11 Mbps.

Hardware structure of WMPC of water-level system.
It is a known fact that the network medium brings on uncertainties such as packet loss communication and transmission delays. A negative effect of these uncertainties has been proved on control performances of closed-loop system controlled via network.24,25 Indeed, the stability of the closed-loop system can be lost if these uncertainties have not been taken into account in the design of the controller. For wireless networks, packet losses depend on the radio link communication conditions (the environment), while the communication delays depend on the protocols used and the size of the networks. In this article, a simple wireless network is performed in indoor environment without obstacles (walls). The communication delays during operation are very small or negligible with regard to the dynamic of the controlled process.
Stability of the water-level system with delay
The stability of linear systems, closed by an MPC, can be ensured, provided that the prediction horizon is infinite. 26 For the finite prediction horizon, as it was stated in Scokaert et al., 27 to ensure the stability of MPC for linear systems, the control law should be feasible at each iteration. Therefore, to establish the stability of the water-level system, closed by the MPC, we have to check for each iteration whether the deduced control signal from the constrained optimization (7) is inside the limits.
In NCSs, a delay is induced in the closed loop due to sensors, actuators, and controllers exchange data across the network. In this work, the induced delay is considered less than one sampling period Ts. Furthermore, the sensor-to-controller delay and the controller-to-actuator delay are lumped together as follows:
The system equations of the linear water-level process with the delayed control signal in unconstrained case are

where
The sampled system over one period is given by 28

where
Using Jury test, we can show that the system is stable for
Simulation and experimental results
The first operation that should be performed in any control applications is the mathematical modeling of the process. In our case, we have a discrete linear model (16) with unknown parameters


Input–output dataset for parameter identification.
The estimated parameters are

This discrete model is used to design the controller. The induced control signal from the minimization of the constrained objective function given in equation (7) or (9) is applied to the nonlinear model 23

Simulation results
In order to validate the proposed control method of water-level system via constrained predictive control, a simulation is carried out to check the tracking performance of the closed loop via RF communication system. MATLAB or Simulink is used to perform the simulation where the control algorithm is implemented using QuadProg for the optimization problem given in equation (7), and the transmission delay is simulated by a block delay available in Simulink. We have to note that the control signal is applied to the nonlinear model described in equation (14).
Control algorithm without integral action
In this case, the control algorithm, deduced from the minimization of the cost function given by equation (7), is applied to the model (14). The numerical values of the control parameters are
The maximum delay allowed is

Tracking performance of the water-level system with WMPC without integral action.

Applied control signal.
It is clear that the system is stable, and the control signal is inside the tolerated range. However, a steady-state error has been induced, and this is due to the model uncertainties of the linearized model used to calculate the predictive control signal. To eliminate the induced steady-state error, the integral action should be included in the design of the controller.
Control algorithm with integral action
In this case, the control signal, solution of the optimization problem (9), is applied to the nonlinear model (14). The numerical values of the control parameters are the same as in the previous simulation only for matrices of the inequality constraint, which are as follows:

Figures 6 and 7 depict the simulation result. Here also the control signal is inside the tolerated range. It is noted that the use of WMPC with integral action eliminates the steady-state error induced by the model uncertainties of the linearized model. However, the settling time has been increased with regard to the previous case (without integral action). For this reason, we have increased the simulation time to 80 s.

Tracking performance of the control algorithm with integral action.

Applied control signal.
Note that during all numerical simulations, we noted that the deduced control signals were inside the requested limits. Therefore, the constrained MPC algorithm induces feasible solutions which ensure the stability of the closed loop.
Experimental results
For the real-time implementation of the WMPC, the numerical values of the control parameters are the same that have been used in simulation. First, the wireless mode control algorithm (7) without integral action has been implemented using C++ software.
The experimental results are shown in Figures 8 and 9. From Figure 8, it is seen that the water level tracks the desired water level with a steady-state error. This behavior has been obtained using simulation. This steady-state error is due mainly to nonlinear mathematical model of the process. Figure 9 depicts the applied control signal which is inside the constraints, and it is practically the same (shape) as the applied control signal obtained in simulation (see Figure 5) with small oscillation due to noise measurement.
Regulation performance of water-level system closed by WMPC.
Applied control signal.
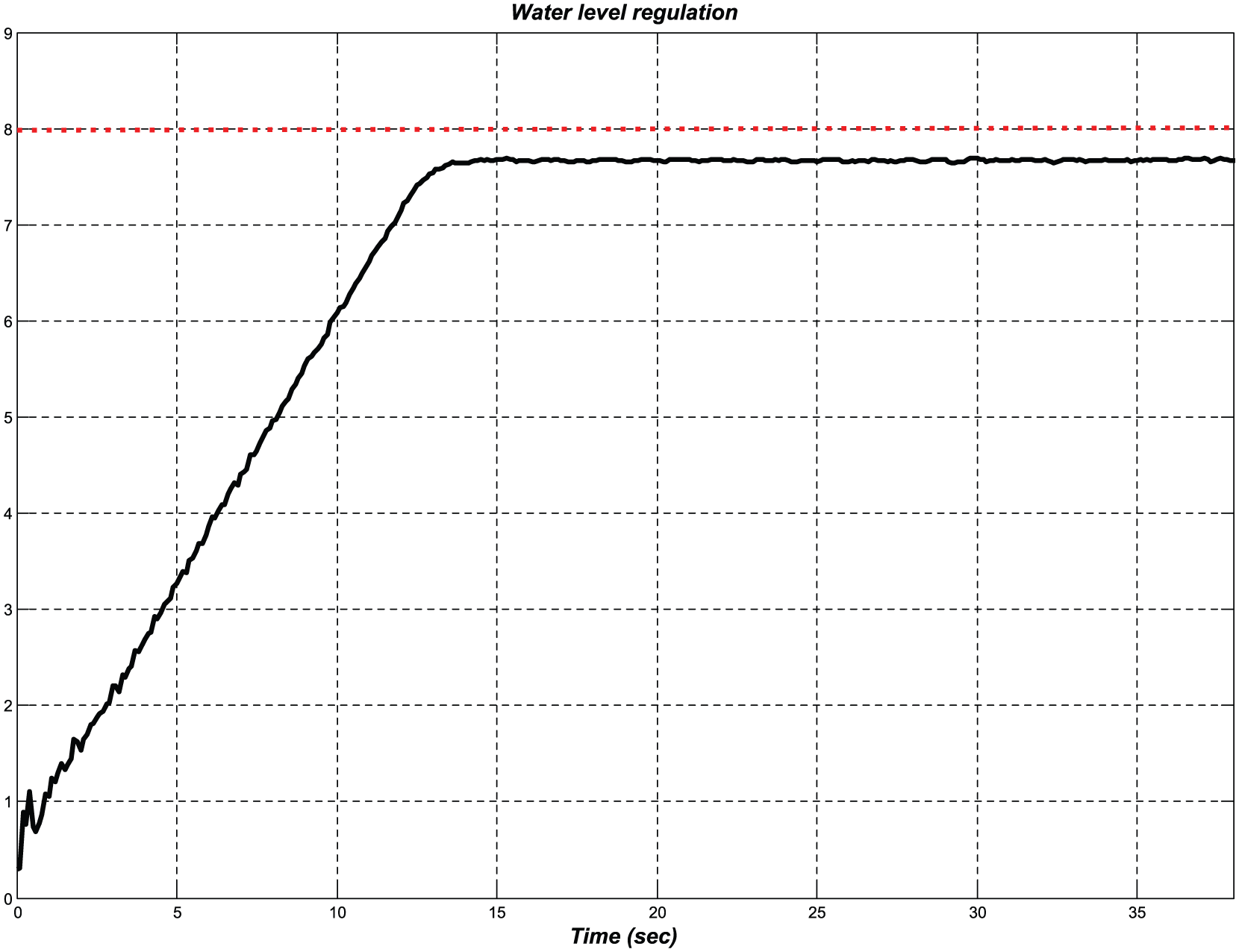
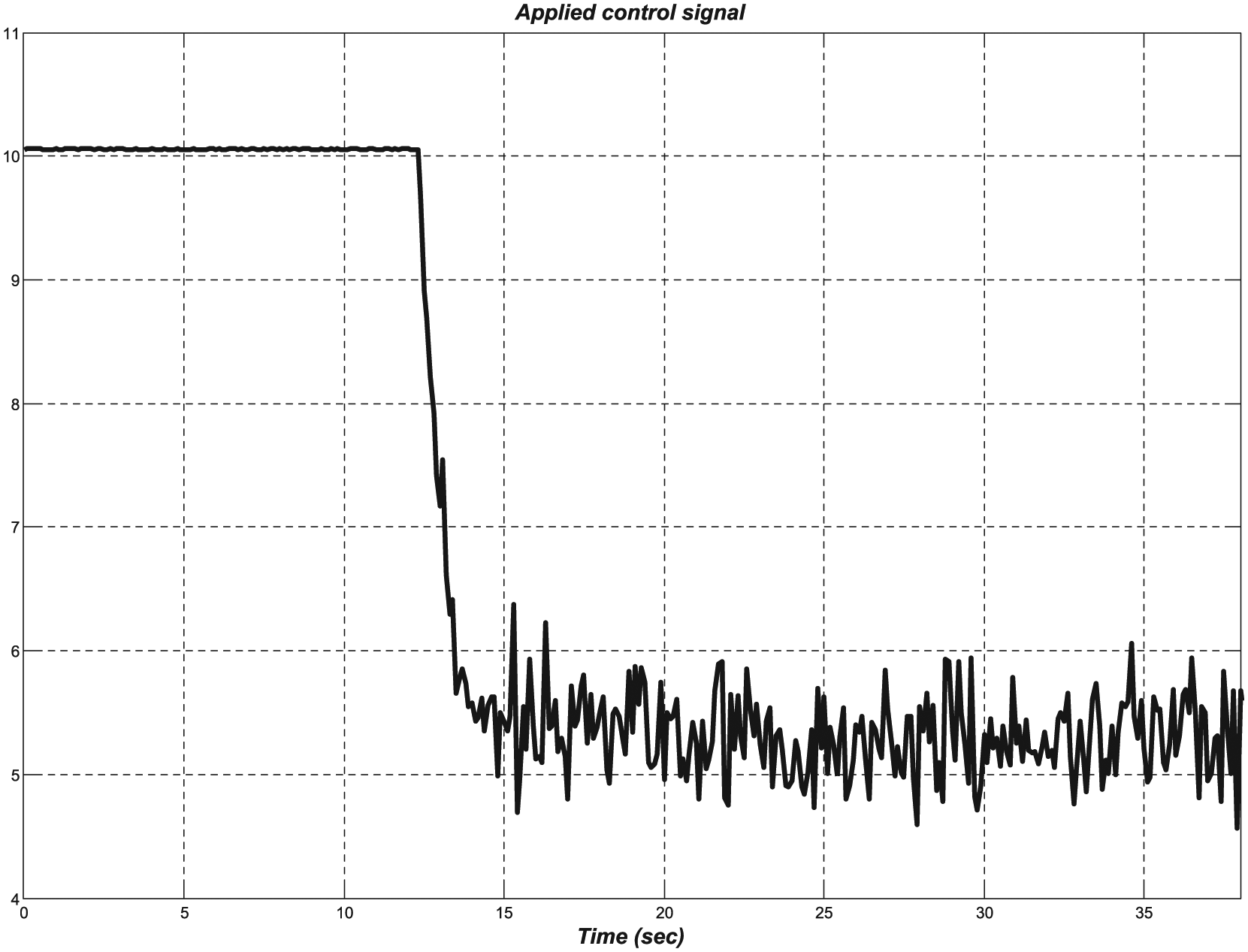
Second, the WMPC with integral action (9) has been applied to control remotely the water-level system. Figures 10 and 11 show the experimental results. From Figure 10, it is clear that there is a positive effect of the integral action on the regulation of the water level around the desired level. Indeed, the steady-state error has been practically eliminated. However, Figure 11 illustrates high variations of the control signal (inside the saturation limits). Therefore, the water-level system under WMPC with integral action consumes more energy than the WMPC without integral action (Figure 9). In this part, the shape of the applied control signal is different from that obtained in simulation (Figure 7).

Water-level control performance: WMPC with integral action.

Applied control signal: WMPC with integral action.
Conclusion
In this article, wireless linear MPC algorithm with input constraints has been presented and applied to control a nonlinear water-level system. The discrete-time linear model of the process has been identified and has been used to design the MPC. Parameter uncertainties, due to modeling and identification errors of the process, have caused a steady-state error of the water level. Integral action has been embedded in the design of WMPC to eliminate this steady-state error. Simulations and experimental results have shown the efficiency and the robustness of this algorithm.
For the future work, the proposed algorithm will be extended to wireless NCSs where the remote controller will be used to control a set of processes wirelessly. Analysis of the influence of transmission delays and packet losses on the control performances for each process is worthy of further investigations.
Footnotes
Acknowledgements
The authors would like to extend their sincere appreciations to the Deanship of Scientific Research at King Saud University for funding the work through the research group project No. RGP-024.
Academic Editor: Jianyong Yao
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This wok was supported by the deanship of scientific research at King Saud University through the research group project no. RGP-024.