
Abstract
This article investigates the networked finite-time control problem for a class of continuous-time linear systems. A novel event-driven data transmission scheme is invoked to reduce the network loads. Moreover, the non-uniform sampling triggered by sampling jitter or the fault of hold circuits is taken into account. By employing an input-delay approach, the underlying system is first reformulated to linear system with time-varying delays. Based on the Lyapunov–Krasovskii functional method, the stabilizing controller is then designed in the finite-time control sense, such that the closed-loop system is finite-time bounded. Potential and advantage of the developed techniques are demonstrated by a numerical example and an application to damping boring bar system.
Keywords
Introduction
In the past decades, networked control systems (NCSs) have attracted increasing attention due to its advantages in shortening the installation period and facilitating the system diagnosis (see Gao et al., 1 Fridman, 2 Xu et al., 3 and Antsaklis and Baillieul 4 and references therein). For NCSs, data sampling and transmission are regarded as two main implementation procedures, where the data sampling is commonly assumed to be periodical.5–7 However, owing to the existence of time-varying nature of the channel load or sporadic faults, periodic sampling is hard to perform, which motivates many authors to focus on the study of non-uniform sampling. 3 In addition, although the conventional scheme can employ the advantages of network-based implementation approach, it may also bring about the severe over-provisioning of NCSs. 8 Hence, how to reduce the transmission loads of network while guaranteeing the required dynamic performance has become a hot research topic recently. 8
To mitigate the otiose communication of the sampling data and reduce the transmission-network loads, event-driven control approach is developed.9–11 Compared with conventional schemes of transmitting all the sampled data, the event-driven control technique can eliminate some trivial sampled data, that is, only the sampled data can be transmitted after the sampling implementation when its value satisfies some prescribed event-driven condition. Currently, some event-driven/self-triggered control strategies have been reported. In studies by Hristu-Varsakelis and Kumar 12 and Heemels et al., 13 an event-driven control scheme is developed when the prescribed event is triggered; however, the hard ware–dependent event detector will be destroyed; another event-driven control scheme in Peng and Han 8 and Peng and Yang 11 is developed, but the considered context is just periodic (uniform). Combination of both the non-uniform data sampling and event-driven data transmission for the NCSs has been seldom studied and few results have been published.
On the other hand, common investigations on the controller design of NCSs mainly focus on Lyapunov asymptotic stability (LAS), which is defined in the infinite-time interval.14,15 For many engineering applications, however, the dynamical performance analysis in a finite-time interval may be paid more attention to. Specifically, the dynamical performance of the system should satisfy a given threshold in a fixed finite-time interval (i.e. finite-time boundedness). Potential examples include the boring bar control system 16 and vehicle suspension system. 17 So far, some attempts on the finite-time control have been conducted.18–25 However, to the best of authors’ knowledge, no results for utilizing the event-driven communication scheme are reported in the finite-time control sense, which motivates us for this study.
In this article, we aim at addressing the finite-time control problem for NCSs with non-uniform sampling and event-driven communication scheme. The main contributions of the article are twofold. First, the event-driven controller design problem for NCSs is investigated in the finite-time boundedness sense. Second, a co-design algorithm is presented to obtain the optimal parameter of event-driven transmission scheme and the networked finite-time controller. The remainder of this article is organized as follows. Section “Preliminaries and problem formulation” introduces the studied model and outlines the problems statement. In section “Event-triggered sampled-data controller design,” a new continuous-time linear system is formulated, for which the sufficient criteria on finite-time boundedness are first derived and then the finite-time controller is designed. Moreover, a co-design algorithm for data communication and control design procedure is provided to find an optimal communication scheme for the lowest deployment costs. Section “Simulations” is devoted to testify the potential of the developed results by a numerical example and an application to boring bar system. Section “Conclusion” concludes this study.
Notation
Preliminaries and problem formulation
Consider a class of continuous-time linear systems described by

where
Under the network-based transmission framework, we aim to design the state-feedback sampled-data control as follows

where
Proposition 1 (Event-driven transmission scheme)
Given a positive definite matrix

where

Networked sampled-data damping boring bar with non-uniform sampling and event-triggered communication.
To proceed further, the following assumptions and definitions are introduced for the development of the main results.
Assumption 1

where L is a known positive constant.
Assumption 2
The sampling period is bounded by h

Remark 1
Assumption 1 describes the property of the exogenous disturbance variable input
Definition 1
Given the positive constants

Remark 2
In the existing publications,18,20 the objective of the finite-time control is to keep the state evolution of the system remain below a given bound in a fixed interval if the initial state values satisfy some prescribed conditions. Here, we extend the definition to another context, that is, applying finite-time control to keep the output evolution of the system always remain below a given bound after a fixed interval if the initial output values satisfy some prescribed condition. This definition is very practical for some engineering projects, such as boring bar system and vehicle suspension system.16,17
Thus, our objective in this article is to design a state-feedback sampled-data controller K under the event-driven transmission framework, such that the resulting closed-loop system (1) is FTB.
Event-triggered sampled-data controller design
In this section, we present the sufficient conditions of finite-time boundedness for system (1), upon which the state-feedback control is designed. Previously, an input-delay approach is first employed to reformulate the system (1) for proceeding further.
Key idea
Denote a set of sampling instants between two successive event-triggered instants

Remark 3
Based on the input-delay approach, the continuous-time time-delay closed-loop system (4) is derived from equation (1). This technique was first introduced by Miheev et al. 26 and has been widely used to solve the sampled-data control/filtering problems.1,14 However, most of the publications mentioned are concerned with the case that the sampling and transmission are synchronous, that is, the sampled data will be immediately sent to the controller via network when sampling is done. However, some of the communication data are actually ineffective to guarantee the required system performance while occupying the network sources. In this note, whether the sampled data are transmitted or not will be determined by the prescribed event-driven condition, which is different with the existing sampling and communication scheme. Employing this scheme, some ineffective data communication will be eliminated and the network loads will be reduced.
Assume that the control gain K in system (4) is known a priori, we shall present the sufficient conditions under which the sampled-data closed system (4) is FTB with the event-driven transmission scheme.
Lemma 1
Consider system (4) and let


and

where









Then, system (1) is FTB with respect to
Proof
Consider the Lyapunov–Krasovskii functional candidate expressed by

where



Taking the full derivation of




Denote

Moreover, by the definition of event-driven transmission scheme in Proposition 1, we have

which yields that

where

with





Thus, we have

When

which implies that the system is Lyapunov asymptotic stable.
Additionally, following from (8) implies that

Besides

Then,
That is, the underlying system is FTB. This completes the proof.
Remark 4
Sufficient conditions of finite-time boundedness for system (1) are obtained by the known control gain K. Moreover, when the controller gain is unknown and needs to be designed, a feasible control design procedure is investigated in the following section.
Finite-time controller design
The following theorem presents the linear matrix inequality (LMI)-based existence conditions for the finite-time controller design of system (4).
Theorem 1
Consider system (4) and let


and

where














Then, system (1) is FTB with respect to

Proof
Denoting
Remark 5
When
Remark 6
When
Given a matrix

Simulations
In this section, we use two illustrative examples to testify the advantages and effectiveness of the co-design of the event-driven transmission scheme and the controller, where Example 1 is first analyzed to show the properties of the event-driven transmission scheme. Then an application to a damping boring bar system in Example 2 is investigated to testify the potential of finite-time boundedness for the developed co-design of the event-driven transmission and controller.
Example 1
Consider a linear system is described by

Assume that
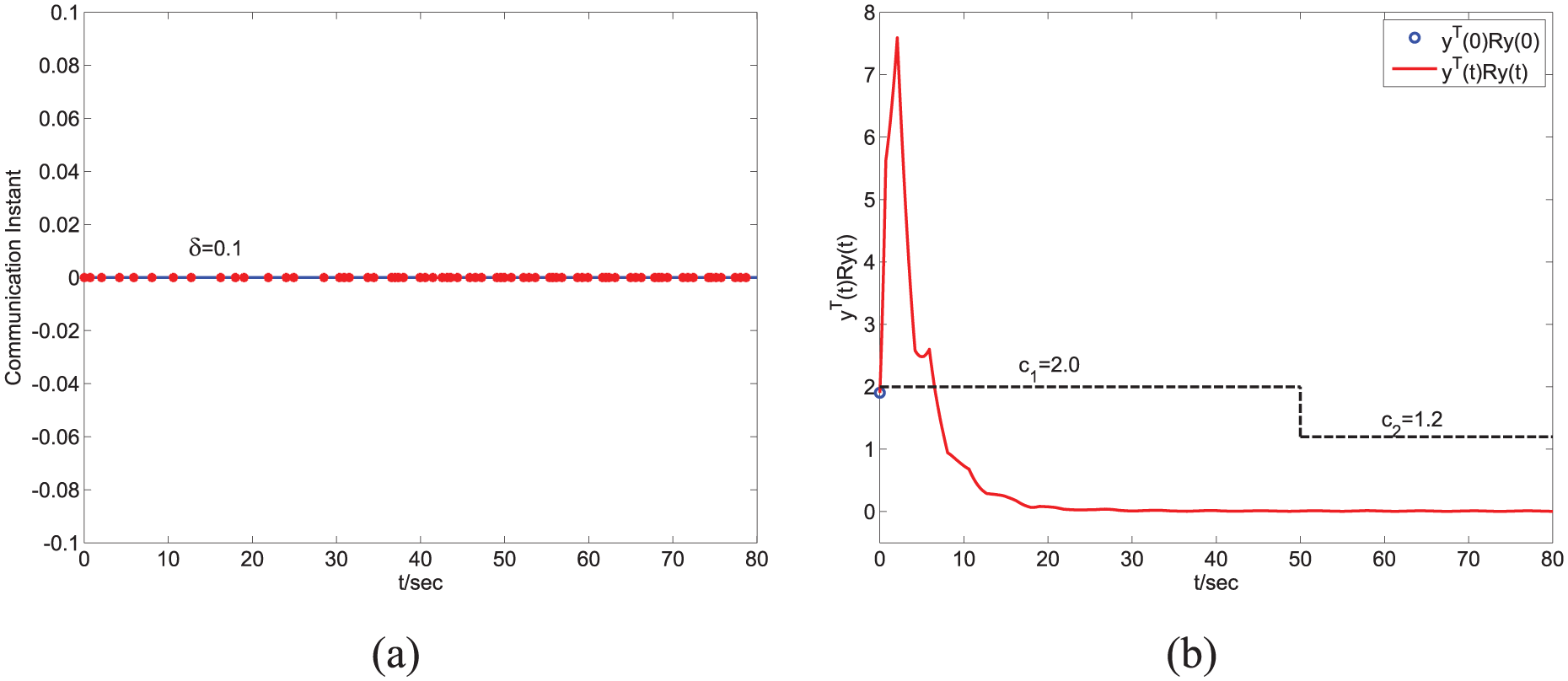
(a) Event-driven communication instants with

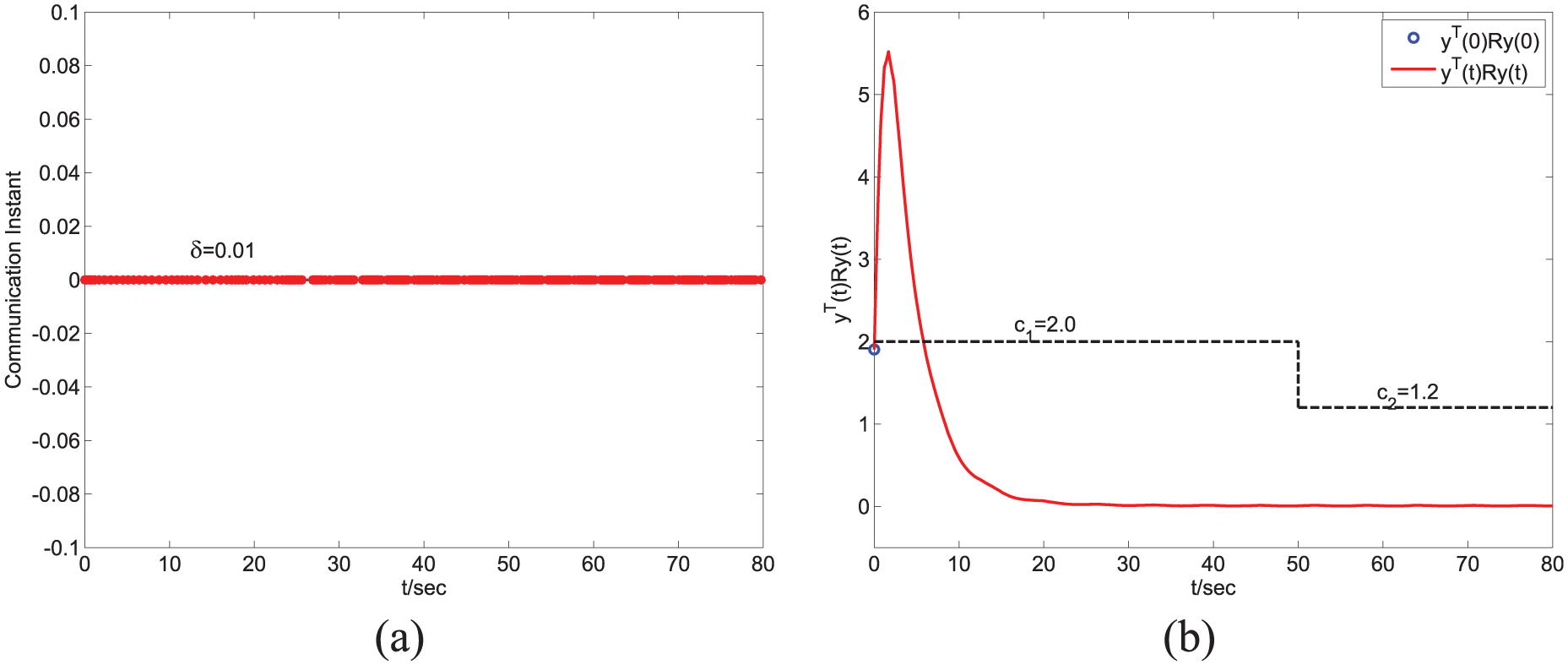
(a) Event-driven communication instants with
(a) Event-driven communication instants with
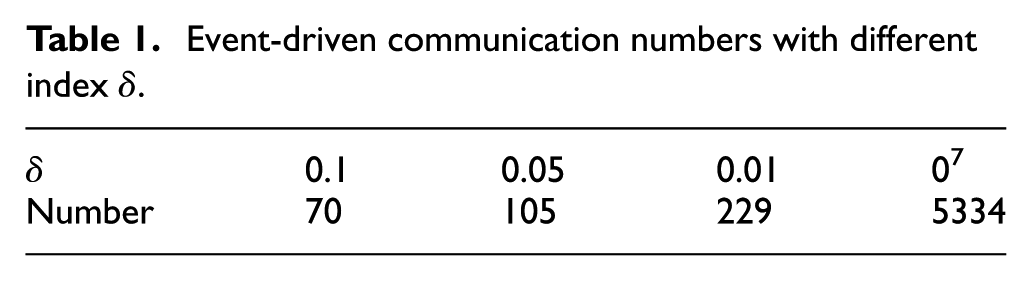
Event-driven communication numbers with different index
Example 2
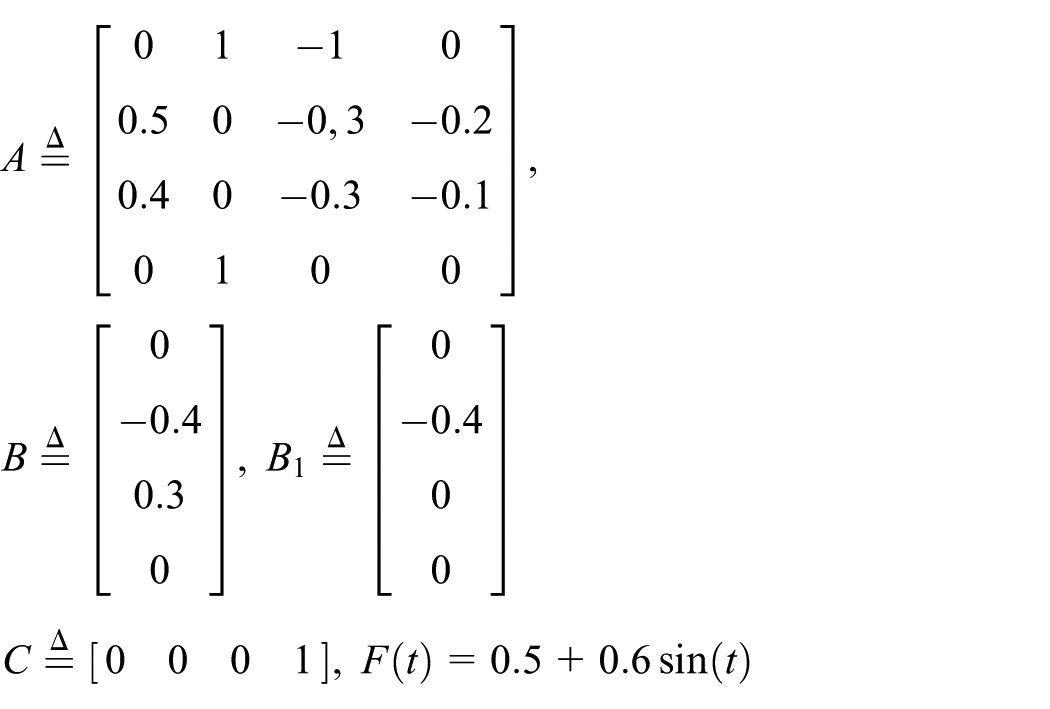
Consider a class of damping boring bar system in Figure 5. The ideal dynamic equations of the sprung and unsprung masses are given by



where m and M, respectively, denote absorber equivalent mass and boring bar equivalent mass; K and k stand for the stiffness and c is the damping; and

(a) Kinetic model of damping boring bar with sampled-data control scheme and (b) the equivalent model.
Denoting


The damping boring bar system is analyzed in this subsection with the following parameters

Then, we have
By employing Algorithm 1, we can obtain controller gain as

(a) Event-driven control input
Conclusion
The problem of finite-time control for NCSs with non-uniform sampling and event-driven transmission scheme has been investigated. Employing an input-delay approach, the network-based closed-loop control system with non-uniform sampling and event-driven transmission scheme is formulated to new time-delay system. The developed event-driven transmission scheme can effectively reduce the network load of communication. The provided two examples have well demonstrated the effectiveness and the advantages of the developed techniques in this article. The developed results are expected to be applicable to filtering for NCSs.
Footnotes
Academic Editor: Nasim Ullah
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partially supported by the National Natural Science Foundation of China (51275139, 51375127, 51205095), State Key Program of National Natural Science of China (51235003), Natural Science Foundation of Heilongjiang 135 Province of China (F201216), and Major Fostering Fund of Heilongjiang Polytechnic (YJP201402).